蒙大納林河礦中厚煤層綜采工作面智能化技術研究
2021-10-25 07:18:56梁云峰張旭輝
礦山機械 2021年10期
梁云峰,關 偉,朱 超,劉 慧,張旭輝
1中煤西北能源有限公司 內蒙古鄂爾多斯 017200
2西安東達馬科智能控制系統有限公司 陜西西安 710075
3烏審旗蒙大礦業有限責任公司 內蒙古鄂爾多斯 017399
4西安科技大學機械工程學院 陜西西安 710054
5陜西省礦山機電裝備智能監測重點實驗室 陜西西安 710054
中煤集團所屬蒙陜地區各礦井是煤礦資源重點開發和戰略儲備基地,中煤集團重點圍繞蒙陜等資源富集省區推進大型礦井群建設,在產在建煤炭產能達到 6 760 萬 t/a。在實際開采過程中發現,蒙陜地區礦井受到突水、堅硬巖石頂板、采空煤柱集中應力、長-大工作面高強度開采擾動等復雜因素影響,加之厚煤層一次采全高,含多層夾矸等復雜結構分布廣泛,具有高地壓、強擾動、復合型厚煤層等特征,巷道頂板下沉、底鼓、片幫嚴重,發生沖擊地壓危險性較高。因此,開展超大規模無人智能化工作面研究與應用是綜采工作面安全、高效開采的需要,可全面提升綜采工作面自動化與智能化水平,實現煤礦安全、高效生產,促進煤炭工業的可持續發展[1-3]。
為全面加快智能化工作面建設步伐,推動高產、高效煤炭開采,根據烏審旗蒙大礦業有限責任公司納林河二號煤礦 3-1 上 102 工作面實際情況,對中厚煤層綜采工作面智能化技術進行研究,建設了智能化綜采工作面。
1 工作面情況
該礦井相對瓦斯涌出量<10 m3/t,絕對瓦斯涌出量<40 m3/min,屬于低瓦斯礦井,煤層具煤塵爆炸危險性,屬Ⅰ類易自燃發火煤層。回采過程中主要充水水源為延安組 2-1 煤頂板以上砂巖裂隙含水層、直羅組下部含水層,充水通道主要為煤層采后覆巖冒落產生的導水裂隙,正常涌水量為 267 m3/h,最大涌水量為 401 m3/h。
該工作面為納林河二號煤礦計劃布置在納林河二號煤礦Ⅰ盤區,東西走向,傾向寬 299.05 m,走向長3 674 m,煤層厚度為 1.6~ 2.6 m,平均厚度為 2.0 m,傾角為 1°~ 3°,褶皺、斷層少量發育,但局部有微弱的波狀起伏,屬構造簡單型。在掘進過程中共揭露斷層 8 條,回采工作面會揭露斷層 4 條。
2 綜采工作面智能化關鍵技術
針對蒙大納林河礦中厚煤層綜采工作面實際情況,重點研究了基于 RFID+慣導技術的采煤機精確定位技術、工作面自動找直技術、綜采工作面遠程控制技術及數字化工作面技術。
2.1 基于 RFID+慣導技術的采煤機精確定位技術
射頻識別技術 (RFID) 是一種通過無線射頻方式來獲取物體相關數據的目標識別技術,利用射頻進行空間耦合進而實現非接觸自動識別。RFID 技術可進行非接觸式遠距離識別,可同時識別多個目標,RFID 閱讀器具有掃描識別速度快、形狀多樣化、體積小、可適應惡劣環境、可重復讀寫、適用性強等特點,且每枚 RFID 電子標簽具有唯一性。因此 RFID技術在煤礦設備管理、人員井下定位與路徑跟蹤,以及礦難救援方面具有較好的應用效果[4-5]。
綜采工作面的液壓支架是一排整齊的單獨個體,在采煤機經過時均處于靜止狀態,而采煤機位置信號實際上就是每個液壓支架的標識編號,因此每個標簽內部可以儲存一個代表液壓支架的編號,通過設置閱讀器的發射功率來設定閱讀器的讀寫距離,使讀寫器掃描附近的標簽,這樣當讀寫器讀取標簽編碼并將此編碼傳送給上位機時,上位機便可確定閱讀器在哪個標簽附近。通過將閱讀器安裝于采煤機機身上,便可確定采煤機的實際位置,如圖 1 所示。
慣性導航技術涉及多個坐標系,其中包括采煤機與捷聯慣導固連的載體坐標系、地心坐標系、地球坐標系、東—北—天坐標系和導航坐標系。綜采工作面采煤機在截割時,通過機身安裝的慣性測量單元進行測量后,對采煤機的位置和姿態進行解算,可直接輸出x、y、z3 個方向的加速度及角速度。
該工作面采用 RFID 射頻以及輔助慣性導航技術修正的工作面精確定位技術,如圖 2 所示。采用RFID 技術確定采煤機實時位置,由采煤機位置通過編碼器校準工控平臺,推導出刮板輸送機位置曲線。鑒于 RFID 技術和編碼器系統誤差,工控平臺采用圖像識別技術對所推導出來的刮板輸送機位置曲線進行校準。采用巷道中地理坐標點對刮板輸送機位置曲線再次進行校準,并由校準后的刮板輸送機位置曲線在工作面形成二維位置坐標圖。在工作面二維坐標圖中,輔助以慣導技術對工作面刮板輸送機位置曲線校準,實現工作面精確定位功能。
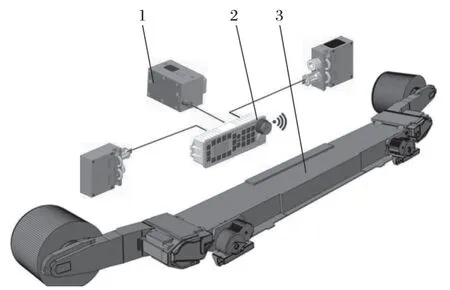
圖2 RFID+慣導技術的采煤機精確定位示意Fig.2 Sketch of precise positioning of shearer with RFID and inertial navigation technology
2.2 綜采工作面自動找直技術
筆者采用了以慣性導航技術與行程傳感器的直線度檢測與調直技術為主,視頻找直為輔的工作面找直線技術[6-7]。
根據采煤機利用行走輪橫跨在刮板輸送機上往復割煤的關系,通過采煤機的位姿信息求得刮板輸送機的中心線軌跡,是刮板輸送機直線度檢測的有效方法。由慣導系統可得出采煤機位姿,根據位姿信息獲取其運動軌跡即可實現工作面直線度的檢測。電液控系統控制液壓缸供液量,從而調整刮板輸送機中部槽位置,實現刮板輸送機機身自動調直。工作面自動調直原理如圖 3 所示。

圖3 工作面自動調直原理Fig.3 Principle of automatic alignment of mining face
視頻輔助找直是通過工作面攝像云臺實時對工作面進行圖像采集,由電腦主機進行圖像處理,提取圖像特征,進行直線擬合,得到工作面直線度,并將數據上傳到控制中心,與規劃路徑進行比較,得到工作面直線度偏差,隨后控制中心發送指令給電液控平臺,對工作面進行校準。視頻輔助直線度監測界面如圖 4 所示。
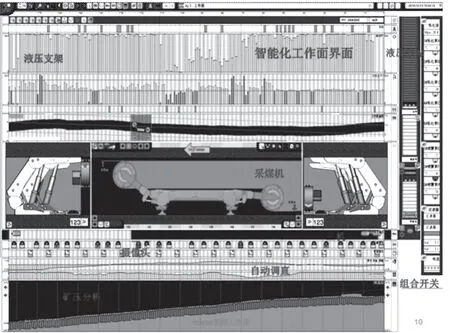
圖4 視頻輔助直線度監測界面Fig.4 Video-assisted straightness monitoring interface
2.3 綜采工作面遠程控制技術
采煤機多參數決策的遠程控制系統構架如圖 5 所示,采用了基于多參數決策的采煤機遠程控制策略,即通過遠程技術、視頻監控技術和采煤機機身傳感器信息等多種參數綜合判斷采煤機工況,實現采煤機遠程控制。
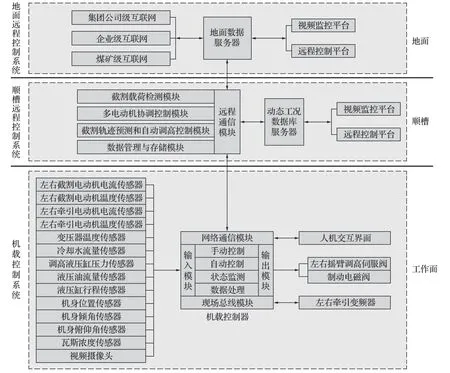
圖5 采煤機多參數決策的遠程控制系統構架Fig.5 Architecture of multi-parameter decision-making shearer remote control system
通過 PLC 采集采煤機實時位姿參數和電流等信息,將數據存入數據庫,用于采煤機工作狀態顯示、截割軌跡預測和采煤機自動控制;采煤機機載控制器實時從數據庫中讀取截割軌跡預測數據,并結合自動調高控制方法控制采煤機自動割煤。當截割電流異常時,結合視頻圖像信息進行遠程人工干預控制。
2.4 數字化綜采工作面技術
為了實現中厚煤層綜采設備機電液一體化的數字化工作面技術,構建了數字化綜采工作面[8-10],包括數字化三維模型構建和基于數字化底板的路徑規劃。
數字化模型構建是通過運輸巷和通風巷數據、工作面頂底板數據,結合已有地理信息數據,生成初始工作面三維模型,如圖 6 所示。利用慣性導航系統、脈沖編碼器、搖臂高度傳感器來精確計算采煤機滾筒截割的上下軌跡信息,解算出采煤機的實時三維位置,最后再結合搖臂高度傳感器確定采煤機滾筒的截割上下軌跡信息。
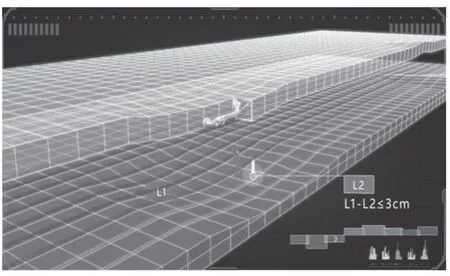
圖6 工作面數字化三維模型Fig.6 3D digital model of mining face
基于數字化底板的路徑規劃功能是通過實時測量頂底板,從而使采煤機后滾筒造成的誤差最小化、可控化。因此該項技術的重點在于頂底板的控制,即基于對已割頂底板的測量,將采煤機后滾筒割煤導致的底板變化量降低到帶式輸送機可以承受的范圍內。
3 應用效果
3-1 上 102 智能化綜采工作面建設工作于 2019年 8 月 10 日開始在地面調試,2019 年 8 月 30 日完成地面調試。2019 年 9 月 3 日開始井下安裝,2019 年 9月 25 日完成安裝并開始井下空載調試,2019 年 10 月8 日工作面開始正式生產。
整個工業性試驗分為地面調試和井下調試兩部分。在地面調試過程中,對程序中的中部、三角煤以及掃煤部分進行了測試。程序割煤工序,在三角煤區域掃煤和中部割煤時,不會重復跟機拉架,達到預期效果。在井下調試過程中,分別進行了跟機自動化程序調試、采煤機頂底刀數據跟隨、切割規劃軟件向采煤機下發割煤程序數據和井下回采聯合調試、切割規劃程序聯合調試,測試了跟機拉架程序、自動找直程序等功能。隨著程序及工藝的進一步測試優化,從開始時 3 h 40 min 割 2 刀煤,到最終 3.5 h 割 3 刀煤,單班最高割 7 刀煤,最高產量達到 12 000 t。
4 結語
3-1 上 102 智能化綜采工作面的建成實現了工作面自動調直和采煤機精確定位、綜采工作面設備集中控制與管理、工作面的遠程控制,實現了工作面無操作人員,兩順槽監控人員精簡到 5 人,極大地減少了工作面人員數量、降低了勞動強度和提高了安全性,為解決蒙陜地區煤層具有強沖擊傾向性礦井的安全高效開采問題提供了新思路。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
防爆電機(2022年1期)2022-02-16 01:14:06
印刷工業(2020年4期)2020-10-27 02:45:52
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
中國交通信息化(2017年4期)2017-06-06 07:21:52
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
能源(2015年8期)2015-05-26 09:15:56
河南科技(2014年18期)2014-02-27 14:14:58
