長征五號系列運載火箭一級氫箱防晃板減配優化設計
2021-10-26 06:08:18余光學鄧舞燕
導彈與航天運載技術 2021年5期
關鍵詞:設計
余光學,鄧舞燕,李 東
(1. 北京宇航系統工程研究所,北京,100076;2. 中國運載火箭技術研究院,北京,100076)
0 引 言
液體運載火箭飛行過程中,各種干擾使得儲箱內的推進劑發生晃動,并對火箭產生附加的干擾力和干擾力矩。在貯箱液體表面張力未起主要作用的前提下,采用等效動力學模型的方法,將推進劑的小幅晃動行為等效為彈簧質量模型進行求解,這是分析推進劑晃動問題的最有效手段之一[1,2]。晃動穩定需要借助防晃板布局提高阻尼來實現,通過防晃板來改善阻尼,不僅可以壓低晃動穩定所需的對數幅頻特性,同時還可以減小相位滯后,其結構簡單,但是會帶來較大的附加質量,損失運載能力。液體運載火箭晃動抑制及穩定問題仍是有待解決的關鍵性課題之一[3,4]。本文重點針對長征五號系列運載火箭(以下簡稱CZ-5)試樣階段一級氫箱防晃板減配問題開展了姿控總體設計分析,包括頻域分析與時域仿真,通過飛行試驗驗證了設計的有效性。
按照傳統設計,CZ-5火箭要求起飛段和淺箱關機段推進劑平均阻尼達到5%以上,其它時段平均阻尼要求為3%以上。在起飛、跨聲速、最大動壓、助推關機等特征秒點均需配置防晃板,在助推段100~175 s之間,鑒于彈性模態復雜,要求適度加密防晃板布局,降低剛-晃-彈性耦合設計難度。隨著設計的深入,CZ-5火箭姿控總體放棄了在所有時間段平均晃動阻尼3%以上的要求,修改為所有特征時刻的晃動穩定裕度滿足穩定性設計指標。對于一級氫箱,鑒于其晃動質量小,晃動慣性力對姿態運動影響小,在助推段部分時間段進一步突破了頻域穩定的設計準則,只要求其時域仿真不能發散,同時兼顧利用系統的穩定調節需求。優化后,全箭防晃板數目大大降低,其中芯一級氫箱只保留2塊防晃板,突破了傳統的穩定設計理念,成為一項重要創新[5]。
1 剛晃彈動力學模型分析
1.1 液體運載火箭晃動模型
推進劑晃動是指火箭貯箱中液體推進劑自由表面的周期運動。火箭控制系統指令引起的箭體運動,發動機關機時的推力變化,飛行中面臨風切變及陣風引起的加速度改變,都能激起貯箱中的液體推進劑晃動。推進劑在貯箱內周期性的晃動,引起推進劑與貯箱之間相互作用力,直接影響火箭飛行的穩定性[6,7]。
考慮剛體、晃動與彈性特性,給出火箭飛行姿態運動的動力學方程[6]如下:
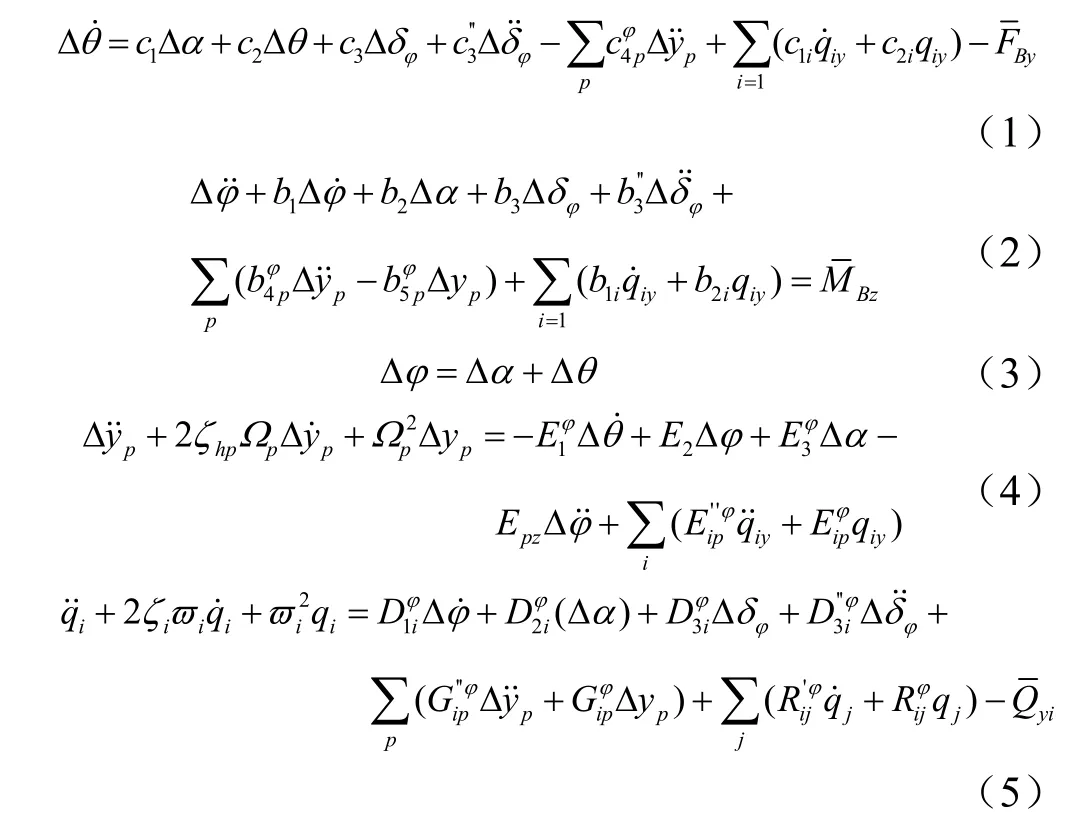
上式中的符號說明參見文獻[8]。
可見,推進劑晃動與箭(彈)體的姿態運動是通過慣性力的相互作用而直接耦合的。如果晃動不穩定,則晃動的幅值不斷增大,作用在箭體上的晃動慣性力就不斷增大,使由晃動慣性力所產生的姿態角不斷增大,導致姿控回路中的非線性環節發生信號阻塞,從而使箭體姿態運動發散。
1.2 液體晃動引起的姿控穩定分析
考慮一個貯箱(p=1)的箭體傳遞函數為

式中0Ω,jΩ分別為零點圓頻率與極點圓頻率,分別為零點阻尼與極點阻尼,。可見考慮晃動后的箭體姿態角傳遞函數增加了一對復數零、極點。
由于k41,b41,b51都是極小的數,故這對復數零、極點的頻率非常接近晃動的固有頻率1Ω,形成一對偶極子。從開環特征根來看,當ξ1﹥0時,由晃動引起的姿態角運動是穩定的。但由于1ξ很小,所以推進劑晃動被激勵后衰減得很慢。
考慮推進劑晃動后的姿控穩定條件取決于晃動零、極點的相對位置。防晃板減配后,晃動質心到火箭質心的距離影響著系統穩定性。當Ω0﹤Ωj時,閉環傳函數無右半平面極點,系統穩定,故零-極結構為穩定結構,即使晃動沒有阻尼系統也是穩定的;反之Ωj﹤Ω0時,系統不穩定,晃動的極-零結構為不穩定結構。
當xz-ρz﹤xlp﹤xz+le時,晃動出現極-零分布,晃動可能不穩定。晃動極-零分布條件進一步變換為

火箭在飛行過程中隨著推進劑的消耗,每個儲箱內的晃動質量中心位置不斷變化,因此晃動零、極點的相對位置也是在不斷變化的,姿控總體方案需要確保火箭全程晃動可控。
2 CZ-5系列運載火箭一級氫箱防晃板減配
CZ-5方案階段,繼承傳統火箭設計經驗,將火箭貯箱主要飛行段平均晃動阻尼按照3%考慮,并以此為依據指導防晃板布局。方案階段設計時,防晃板采用“環形、半圓形和十字分隔”3種,層數較多。直到試樣階段,一級氫箱防晃板優化為6塊。
在CZ-5 Y2飛行任務之后,重點針對一級氫箱防晃板布局開展分析,一級氫箱取消防晃板后,助推段短時間(56~90 s)內會出現頻域不穩定,但時域仿真表明,助推與芯一級全程飛行不會出現發散失穩。考慮到CZ-5B火箭對利用系統的依賴性較強,繼續保留了一級氫箱400 s附近的防晃板,為利用系統工作創造更加穩妥的條件,因此一級氫箱可取消前4塊防晃板。
從CZ-5 Y3任務開始一級氫箱只保留2塊防晃板,各貯箱的防晃型式為“環形擋板”和“箱底十字分隔板”2種。其中環形板的作用是通過提高晃動阻尼抑制晃動干擾,十字隔板的作用是通過提高晃動頻率實現對發動機關機段晃動能量的快速耗散,兩者的目的都是確保火箭姿控的穩定性。
3 CZ-5系列運載火箭一級氫箱晃動穩定研究
3.1 助推飛行段晃動分析
3.1.1 CZ-5任務分析
在一級飛行段(含助推段與芯一級飛行段)對一級氫箱無防晃板狀態開展頻域分析與時域仿真。取一級氫箱阻尼為極小值(1×10-6以下,低于空箱阻尼值1×10-5),結果表明:在助推飛行段,氫箱晃動在56~90 s存在頻域不穩定的工況,其它時間段可以實現幅值或相位穩定。圖1給出了60 s時刻箭體開環頻率特性,對應于火箭上限狀態,氫箱幅值超過0 dB,相位朝下穿越-180°,不滿足頻域穩定條件。
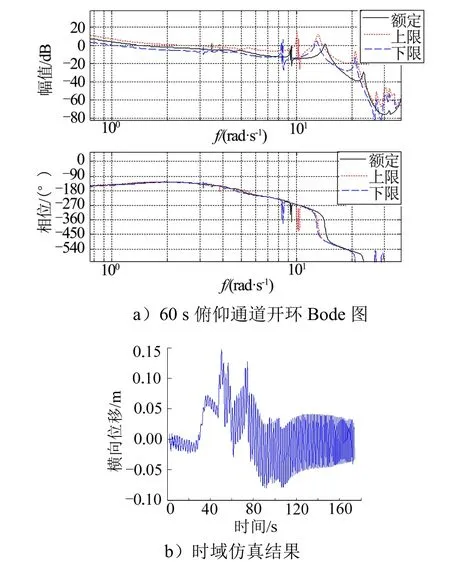
圖1 助推飛行段60s穩定特性Fig.1 Stability Characteristics of 60s
從頻域穩定性的角度,去掉芯一級氫箱防晃板后,56~75 s和90 s特征點,晃動不穩定;從數學仿真結果的角度,晃動阻尼減小后晃動幅度增大,助推段氫箱最大晃動位移值約為0.05 m,晃動幅度增大對箭體角速度和姿態都有一定的影響,會導致箭體抖動。
CZ-5火箭典型特征秒點的晃動質量與箭體總質量對比如表1所示。芯一級H箱晃動質量不到飛行總質量的1/100。可見,芯一級氫箱即使有晃動,其慣性力對箭體影響也比較小。
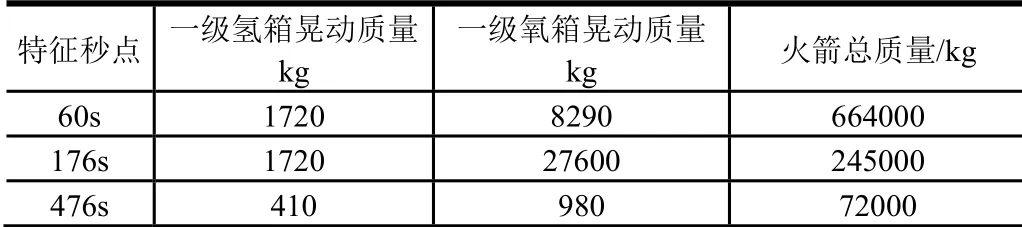
表1 一級貯箱晃動質量與火箭總質量比對Tab.1 Comparison between the Sloshing Mass of the First Stage Tanks and the Total Mass of the Rocket
對芯一級氫箱,取消防晃板后,雖然助推段短時間(56~90 s)內會出現頻域不穩定,但由于芯一級氫箱晃動質量相對整體火箭質量而言很小,其帶來的慣性力也很小,因此芯一級氫箱晃動不會對飛行姿態、發動機擺角等特征參數帶來顯著的不利影響。時域仿真表明,在助推與芯一級絕大部分時間內,氫箱晃動不會引起姿態失穩。
3.1.2 CZ-5B任務分析
CZ-5B貯箱防晃板的設計來源于CZ-5,即CZ-5在設計防晃板的時要求兼顧CZ-5B。CZ-5B Y1飛行一級H箱的防晃板只保留2塊,個別秒點氫箱晃動雖然為“極-零”狀態,但是時域仿真全程姿態穩定,貯箱晃動未發散。
從頻域看,俯仰通道芯一級貯箱出現“極-零”,但是晃動幅值穩定,俯仰通道助推貯箱額定和上限相位穩定,下限相位不穩定。圖2給出了CZ-5B任務130 s時的俯仰通道開環Bode圖。時域仿真結果表明,各級飛行段晃動均是穩定的。
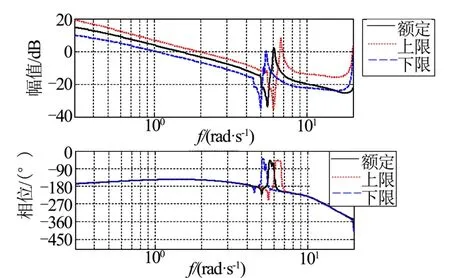
圖2 助推飛行段晃動130s俯仰通道開環Bode圖Fig.2 Open-loop Bode Diagram of Pitch Channel Sloshing at the Boost-flight Phase 130s
對于CZ-5B任務,一級氫箱防晃板減配后助推飛行段和芯級飛行段個別秒點出現“極-零”現象,頻域穩定不能做到幅值與相位雙穩定,時域仿真表明晃動幅值較小,引起的晃動慣性力也小,晃動不發散,因此不影響姿態穩定性。
3.2 芯一級飛行段晃動分析
對CZ-5芯一級飛行段進行仿真,采用1.1節中的剛體、晃動、彈性動力學方程,姿態控制取額定狀態,時域仿真結果見圖3~5,圖中0 s對應芯一級飛行段初始時刻,為絕對飛行時間175 s,從仿真結果可知,一級氫箱防晃板減配后仿真出現了明顯的晃動現象,但是火箭飛行過程中全程姿態穩定。
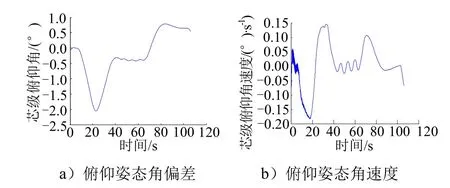
圖3 芯一級飛行段俯仰姿態動態Fig.3 Simulation of Pitch Attitude During the First Core Stage

圖4 芯一級飛行段氧箱晃動位移Fig.4 Soshing Displacement of the First Core O-tank

圖5 芯一級氫箱晃動位移Fig.5 Sloshing Displacement of the First Core H-tank
3.3 防晃板減配對晃動影響分析
從上述可見,液體晃動對利用系統、增壓輸送系統、發動機系統能否正常工作均會帶來影響。
a)CZ-5助推器氧箱或煤油箱,如果阻尼板數目減少,部分時段晃動阻尼值將降低為設計值的幾十到幾百分之一,將直接導致液氧或煤油箱晃動無法穩定。又由于液氧與煤油箱晃動質量均偏大,晃動不穩定會導致整個飛行姿態的不穩定,因此試樣階段不再減配。
b)CZ-5/CZ-5B從姿控穩定的角度,一級氫箱防晃板減配后一級飛行段其晃動位移比較小,仿真結果小于0.05 mm,因此取消防晃板在該段對利用系統風險很小。二級飛行段,利用系統全程要調節,取消防晃板后存在大幅值晃動的風險,對利用系統正常工作是不利的,因此二級氫箱防晃板不進行減配優化。
c)一級關機段如果液體出現晃動,發動機存在夾氣的風險,國內外火箭均出現過類似的故障現象,因此要確保關機段液體晃動阻尼。目前CZ-5氫箱在底部有“+”子隔板與阻尼板,其中“+”子隔板起到降低晃動質量、提升晃動頻率的作用,而阻尼板起到提升阻尼的作用。從確保關機過程安全的角度看,這兩個結構是必須要保留的。
d)CZ-5二級采用氣瓶增壓方式,如果二級氫箱無阻尼,二級一次飛行段很容易出現大幅度液體晃動,晃動位移到滑行段后還會進一步放大。液體大幅度晃動很可能加劇增壓氣動與液體的熱交換過程,消耗增壓氣瓶的氣體用量,出現這種情況對增壓系統的設計非常不利。因此二級飛行段氫箱與氧箱防晃板需要保證一定的阻尼作用,抑制推進劑晃動,盡管氫箱晃動質量不大,二級飛行段也不進行氫箱減配設計。
4 飛行結果分析
4.1 一級氫箱防晃板減配前飛行姿態
CZ-5火箭Y1、Y2為一級氫箱6塊防晃板的狀態,其中第4塊防晃板布局在助推關機時刻。晃動阻尼非定常項參數f(t)如圖6所示,可知200 s時氧箱與氫箱晃動阻尼相對較低,意味著晃動容易被激勵。
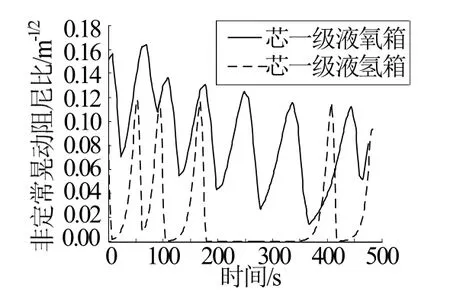
圖6 芯一級貯箱晃動阻尼非定常項f(t)Fig.6 Unsteady Damping Ratio f(t) of Tanks during the First Core Stage
CZ-5火箭Y2芯一級飛行段姿控情況如圖7所示,可知飛行姿態在175~210 s之間出現明顯的振蕩。其中,芯一級氧箱和氫箱存在較小的晃動,分析液位抖動頻率與氧箱/氫箱晃動頻率(設計值:200 s時氧箱頻率0.4 Hz、氫箱頻率0.41 Hz)一致,可以確認推進劑出現了晃動。飛行姿態表明,晃動得到了較好的抑制。

圖7 Y2飛行芯一級飛行段姿態Fig.7 Attitude of Y2 Rocket during the First Core Stage
4.2 一級氫箱防晃板減配后飛行姿態
CZ-5 Y3火箭飛行為一級氫箱2塊防晃板的狀態,Y1、Y2與Y3飛行的一級貯箱液體晃動特性如圖8所示。依據利用傳感器測量測試結果可知:Y3任務芯一級氫箱在助推飛行段70~120 s、130~170 s,以及芯一級220~250 s左右出現明顯晃動,其中助推段晃動位移最大峰峰值約140 mm、晃動位移均是振蕩收斂的。比對氫箱液位三角波電壓可知,與Y1、Y2相比,Y3飛行氫箱晃動明顯變大,為晃動阻尼降低所致。

圖8 一級貯箱液位測量結果Fig.8 Measurement Results of Y1~Y3 Rocket Fuel Level
CZ-5 Y3飛行結果表明,取消一級氫箱4塊防晃板后助推與芯一級飛行段姿態穩定,晃動并未發散。其中姿態角速率中的頻率成分主要表現為發動機推力脈沖,液體晃動較小。從圖9可見,盡管CZ-5 Y3取消了4塊氫箱防晃板,在助推飛行段部分時間段晃動并不穩定,容易在姿態調整等動作下出現晃動,但是由于液氫晃動質量小,氫箱晃動對姿態控制并無明顯影響,飛行結果和理論預示分析結果是一致的。

圖9 Y3飛行俯仰姿態結果Fig.9 Pitch Attitude of Y3 Rocket during the First Flight Stage
5 結 論
傳統液體運載火箭在頻域設計時往往要求貯箱的液體晃動為幅值與相位雙穩定,當無法保證雙穩定時候,至少要求保證單穩定。對于CZ-5一級氫箱,修改設計準則為:頻域設計容許部分時間段氫箱晃動不穩定;在時域仿真中,要求氫箱晃動幅值不發散,即在給定的初始條件下,時域仿真的晃動幅值出現振蕩,晃動位移不超過極限位移即可。
CZ-5火箭試樣階段通過一級氫箱防晃板減配優化分析,滿足了穩定設計的需要,同時有效降低了結構質量,在反復迭代與驗證的基礎上完善了設計依據,充分體現了CZ-5火箭精細化設計的思想。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04