可動態跟隨抓取多功能機器人實訓站設計
2021-10-27 07:00:26陳志華姚廣芹
中國新技術新產品 2021年15期
陳志華 姚廣芹
(1.青島昊川電子科技有限公司,山東 青島 266000;2.青島城市學院,山東 青島 266000)
隨著德國提出的“工業4.0”在全球風靡以及“中國制造2025”戰略的推進,工業機器人也在中國迅速發展,已經成為制造業轉型升級的重要抓手與核心動力,中國機器人市場的發展需求巨大,由于人口結構變化、青少年對制造業工作思維的影響,因此招工難、用工難問題突顯,相應的人才供需矛盾也日益嚴重;基于“產業發展,教育先行”的理念,工業機器人將作為一種標準自動化設備在全國得到廣泛應用,目前我國已經成為全球最大的工業機器人市場,隨著智能制造的推進,工業機器人及其相關周圍配套實訓設施將成為培養機器人技能人才的有效途徑[1]。該設計將工業機器人行業發展的新知識和新技術融合在實訓中,工作站模擬實際工作環境,融“教、學、做”為一體,提高學生自動化控制技術、機器人技術水平,提高學生對研發、操控和維修工業機器人的興趣;旨在培養學生的機器人編程、集成、改造、開發以及管理等方面的高級技能,能夠全面提升學生實踐、實戰經驗,培養優質的工程科技專業素質。
1 總體設計思路
該實訓工作站集成機器人本體、控制單元及若干個行業典型應用單元模塊,采用模塊化設計,實訓站中每個功能單元均為獨立機構,機械組件和電氣組件可以靈活配置,與工業機器人構成一種典型應用場景[2]。各單元的傳感器、執行器等現場設備信號外引到標準接口,再連接到控制器,簡化接線,便于調試與檢修。系統本著安全可靠的原則,設有漏電保護、短路保護、急停保護、限位保護以及區域保護等各種保護功能。
2 設計原理功能
系統整體布局合理、簡潔大方,充分考慮了操作的便捷性,實訓站整體布局如圖1所示。在實際教學應用中,模塊化的結構既保證了每個模塊可以單獨運行,方便學生入門學習和實驗訓練;又可以部分/整體聯機運行,使學生深層次地進行應用學習和培訓[3];還可以根據子系統的不同集成方式和不同知識結構的合理整合,演繹不同的選修課程。具體模塊如下:1) 機器人工作臺臺體的總成雙面設有柜門,柜內設有機器人控制系統、機器視覺光源控制器、輸送帶和震動盤控制器,輸送帶驅動設備包括電機、齒輪,外齒回轉支撐,電機與電機驅動器的電纜連接,安裝于固定板下方,電機的輸出軸與設于固定板的轉孔配合,通過通信信號實現自動啟停與調速;底部設裝有萬向福馬輪腳輪和固定支撐。2) 電控臺設有工控機載體,采用獨特翻轉收放結構,可以在實訓教學工作臺中上位機、工控機和電腦等可收放翻轉的載體裝置中應用,包括屏幕固定翻轉單元、鍵盤鼠標放置翻轉單元以及主機放置推拉收放單元;電控臺電氣主控系統主體框架采用拖鏈推拉方式通過電氣主控模塊安裝于電氣主控模塊滑軌固定座,電氣控制集成單元設于電氣移動柜內,電氣主控模塊主體框架包括從上到下依次設置的人機界面、電氣控制操作面板以及電氣控制集成單元,布局功能分明、層次清楚且方便維護。3) 各典型行業功能單元組件通過多種快換裝置抓手實現機器人的動態分揀、搬運、碼垛、軌跡模擬涂膠、視覺裝配、變位焊接以及拋光打磨等所有行業應用培訓考核的功能;功能單元組件按標準模塊化通過鋁型材“T”形槽快速配合固定的組件安裝于機器人工作臺體面上,各工位之間互不干涉,變更位置和升級更換簡單、方便靈活,提高了使用效率;動態跟隨分揀組件中設有視覺光源燈,通過CAT-6標準的線纜與視覺電源控制器相連,通信速率不低于1 000 Mbps,實現了視覺裝置的自動啟停、觸發與信息交互。變位焊接功能組件設有高精度閉環自動控制的伺服變位裝配組件,包括傾斜翻轉組件和水平旋轉組件,配合夾緊氣缸和夾緊擋頭與伺服電機協同工作。4) 實現各行業應用培訓考核功能組件的快換末端裝置,機器人手臂的法蘭端安裝了快換裝置模塊,采用氣動驅動控制連接不同工具,無須人為干涉自動完成切換。設有智能人臉識別考核系統,可以在云臺記錄出勤、考核、打分以及存檔等信息,且與工控機CAT-6標準的線纜連接。

圖1 實訓站整體布局圖
該實訓系統由淺入深,由單機到系統,由模擬到實操,技術具有連續性。由實驗平臺模擬到實際工業現場應用,讓學生逐步掌握多個學科技術,系統提供開放的平臺,可根據教學需要與專業建設要求開展多層次、全方位的二次開發與研究,也可結合機器人技術與當地工業背景開展應用課題研究。
3 功能流程實施
控制流程由主控單元西門子S7-1200控制,并配有HIM人機界面進行操作和監控。PLC通過Modbus-TCP發送通信指令給機器人,如圖2所示,機器人根據不同的指令,利用快換裝置迅速選取不同功能場景的工具,進入對應的功能流程。圖3中,2個鋁合金支架上分別裝設夾爪、真空吸盤、打磨頭以及膠槍等工具,空間緊湊且利于機器人操作。

圖2 實訓臺功能流程
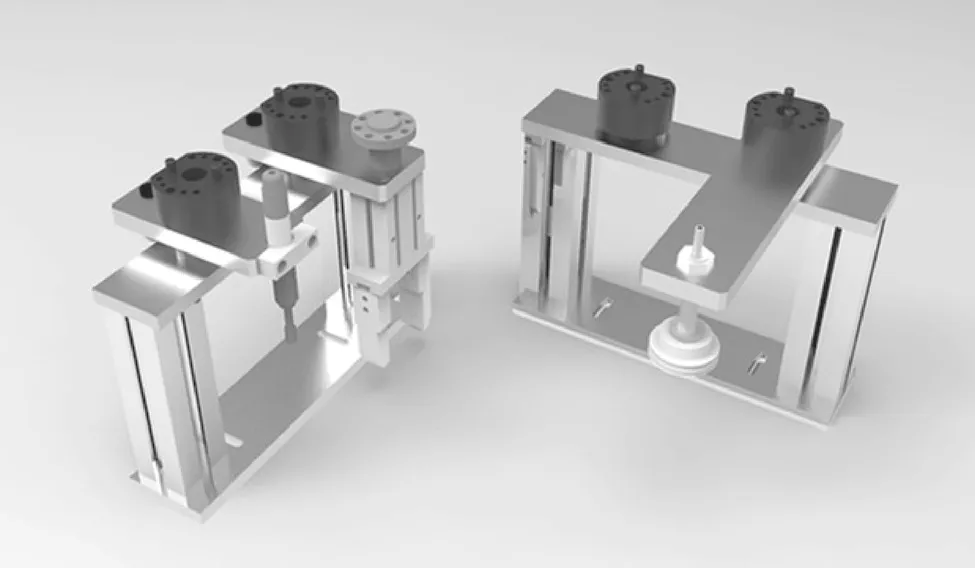
圖3 多功能快換裝置
3.1 碼垛行業功能
當工業機器人虛擬模擬量信號通道AI1=1時,機器人使用夾爪工具將料塊搬運至指定位置,實現對碼垛行業功能的考核,完成該任務后,工業機器人將夾爪工具放回原位庫,AI1清零,等待下次功能信號。
3.2 打磨行業功能
當工業機器人虛擬模擬量信號通道AI1=2時,機器人使用夾爪工具將打磨塊從打磨物料存放庫搬運至變位機單元,更換打磨工具對打磨塊進行打磨;打磨完成后,工業機器人更換夾爪工具將打磨塊搬運回打磨物料存放庫,完成該任務后,工業機器人將夾爪工具放回原位庫,AI1清零。
3.3 靜態檢測裝配行業
當工業機器人虛擬模擬量信號通道AI1=3時,機器人使用吸盤工具把碼垛單元模塊上的異形芯片吸取至靜態視覺單元模塊,并對其進行識別(識別顏色和形狀),識別完成后,根據識別結果(相機可自動對抓取位偏差進行校正)將各異形芯片料塊依次裝配到裝配單元,完成該任務后,工業機器人將吸盤工具放回原位庫,AI1清零,等待下次功能信號。
3.4 涂膠行業功能
當工業機器人虛擬模擬量信號通道AI1=4時,機器人使用涂膠工具進行涂膠作業,完成該任務后,工業機器人將涂膠工具放回原位庫,AI1清零,等待下次功能信號。
3.5 焊接行業功能
當工業機器人虛擬模擬量信號通道AI1=5時,機器人使用夾爪工具將焊接塊從焊接物料存放庫搬運至變位機模塊,并依據角度要求跟隨系統角度進行變換,機器人更換焊接工具對焊接塊進行模擬焊接,焊接完成后,工業機器人更換夾爪工具將焊接塊搬運回焊接物料存放單位庫,完成該任務后,工業機器人將夾爪工具放回原位庫,AI1清零,等待下次功能信號。
3.6 動態跟隨分揀行業
當工業機器人虛擬模擬量信號通道AI1=6時,機器人使用吸盤工具到抓取位置等待視覺信號,動態視覺單元通過識別運動中皮帶上的異形芯片,將識別到的料塊的位置和代號信息發送給機器人,通過動態視覺單元識別通信位置信息,并進行動態跟隨抓取,通過動態視覺單元給的代號信息識別形狀(1為方形,2為圓形,3為半圓形),機器人根據識別結果分別放到碼垛單元上不同的分類料盒內,直到按下停止按鈕,機器人停止動態跟隨分揀功能,工業機器人將吸盤工具放回原位庫,AI1清零,等待下次功能信號[4]。
4 系統特點
該系統的設計充分結合行業應用的特點,功能完善、設計合理,其特點如下:1) 該設計不需要教師、學生或考官等使用人員多地點移動就可以進入相應考核工位上進行教學示范、實際操作以及點評等,只需要在一站式考核工作站上選擇相應的功能按鈕就能選擇考核內容,提高了使用效率,讓操作更加方便、靈活。2) 實訓考核臺用鋁型材和鋼板拼接組成,方便機械部件和電器元件的拆卸安裝。實訓臺的桌腳使用水平調節支撐型腳輪,便于裝置移動位置;通過靈活設置控制面板、功能單元組件,不僅能夠讓考核功能單元的使用布局更為明了、層次更清楚,還能夠方便單獨對機器人外圍功能單元組件進行維護替換和功能升級,而不需要替換整個工作站,達到降低成本、節約資源的目的;另一方面,通過設置安裝座、固定座,能夠使控制面板、功能單元組件的拆裝更為簡便快捷,從而更加靈活、方便地在培訓任務及考核內容中增加設置任務需求,使底層控制系統對用戶開放。3) 以3C行業最典型的異形芯片插件工藝過程為任務主線,串聯六軸工業機器人使用相應快換工具配合機器視覺識別到產品料塊的位置和代號信息,不需要輸送帶緩停就可以進行動態跟隨抓取,抓取的產品包括異形芯片多色工件以及PCB 電路板等,采用模擬化設計提高裝配產品的節拍率及復用率,通過視覺裝置對器件的動態分類進行整理。4) 通過設置安全光柵、聲光警示燈和各類傳感器,能夠在考官參與較少的環境下,用警示自動信號進行提醒、記錄,從而能夠在高效自動程度的宗旨下使用,該實訓站提高了該工作站的廣度性。5) 通過設置智能人臉識別考核系統將出勤、考核、打分以及存檔等信息記錄在云臺,以便記錄考核;也可以與其他類似設備組合,實現對各類信息進行統計的功能需求[5];末端執行器可以快速更換,方便二次開發新功能,進一步方便使用人員對工作站進行操作。6) 配套仿真軟件,可以構建搬運、碼垛、焊接、裝配、涂膠及其自動化生產線等工業機器人典型工作方式的工作站,可實現更換末端執行器、機器人軌跡生成及優化等功能,使學生進一步了解工業機器人的工作方式與組成,并培養學生規劃、設計系統和制定方案的能力。
5 結語
該設計提供了一種一站式可動態跟隨抓取式六軸串聯機器人多功能實訓考核工作站,加入行業場景標準和規范,通過多種快換裝置實現機器人的動態分揀、搬運、碼垛、模擬軌跡涂膠、3C視覺裝配、變位焊接以及拋光打磨等典型行業應用培訓考核功能。該系統的設計立足于工業實際應用,最大程度地讓學生了解工業中應用最為廣泛的行業功能,可最大程度地還原各個功能應用的真實程度,1臺綜合實訓站可以完成多種工業行業的專業技能培訓及考核,從而減少設備的投入成本,創造更高的經濟價值。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
童話世界(2020年10期)2020-06-15 11:53:22
裝備制造技術(2020年12期)2020-05-22 09:25:38
中國科技論壇(2017年7期)2017-07-25 08:49:53
電子制作(2017年8期)2017-06-05 09:36:15
中國衛生(2016年2期)2016-11-12 13:22:24
信息記錄材料(2016年4期)2016-03-11 15:22:54
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫藥現代遠程教育(2014年16期)2014-03-01 04:28:54
江蘇高職教育(2014年4期)2014-02-28 11:40:57