露天礦山自動駕駛技術研究
2021-10-27 07:00:30高利敏曹燕朝梁思遠
中國新技術新產品 2021年15期
高利敏 曹燕朝 周 楊 梁思遠
(山西維度空間信息科技有限公司,山西 太原 030000)
0 引言
在國家工業4.0和中國制造2025戰略的指引下,傳統露天礦山以創新驅動發展為主題,深入推進“兩化”的高層次深度融合[1],由傳統型、經驗型向自動化、系統化、多元化以及智慧化方向發展,應用先進的高新技術將礦山現有的設計、生產、經營和管理等各系統整合統一,實現整個礦山系統的信息集成與共享,各部門協同作業,逐步走向智能化、智慧化礦山。不僅能避免和減少對駕駛人員安全、健康的危害或威脅,而且能大幅提升經濟效率、降低運輸成本,確保礦山的安全生產[2]。
1 露天礦山自動駕駛作業場景
露天礦山開采作業工序遵循“穿孔-爆破-采裝-運輸-排卸”的基本流程,自動駕駛礦卡運輸作業主要的環節為開采區域(精準停靠和自動駛離)、運輸道路(循跡行駛、自主避障和上/下坡)、排卸區域(精準停靠、自主避障和自動傾倒)和定點后勤保障區域(維修保養、加油補水)等4個作業場景。
2 露天礦山自動駕駛關鍵技術
自動駕駛系統將探測、識別、判別、決策、優化、執行、反饋以及糾控功能融為一體,集多種頂尖科技成果于一身,是可以自主分析、自我學習以及自動進行成果總結的多學科交叉融合的技術系統。該系統涉及的關鍵技術包括環境感知技術、定位技術、安全通信技術、分析決策技術、智能調度技術和控制執行技術等[3-4],自動駕駛總體方案如圖1所示。
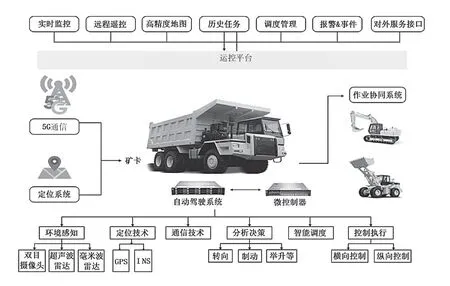
圖1 自動駕駛總體方案
2.1 環境感知技術
環境感知技術在自動駕駛系統中負責收集礦卡自動駕駛功能所需要的信息,露天礦山作業區的主要障礙物包括靜態障礙物和動態障礙物,其中動態障礙物主要包括其他礦卡、裝載設備、輔助設備以及工作人員等,靜態障礙物主要包括安全車擋、破碎站和路面亂石等。考慮到以上障礙物的特點,采用視覺、毫米波雷達和超聲波雷達相結合的組合感知系統,實現對動靜態障礙物的高精度多模態感知識別分類,通過多源傳感器信息融合、多目標跟蹤等技術實時收集周圍的環境信息,以提高對環境感知的準確性,為自動駕駛決策提供及時、準確且可靠的決策依據。
雙目視覺相機是利用仿生原理,包括鏡頭、攝像系統和圖像處理系統,通過標定后的2個攝像頭得到同一個物體的同步曝光圖像視差和深度,將像素分辨率、亮度、色彩和色調等信息轉變成數字化信息,經過計算機視覺的自適應識別算法對周圍環境進行匹配和標定。由于環境特殊,受光線、風力和礦卡的不規則震動等原因會導致拍攝的視頻出現不規則運動,采用空域濾波來減少圖像生成、傳輸或者因外部環境而產生的噪聲,并優化失真現象,提高圖像的信噪比,對視頻中圖像幀間進行運動矢量估計,分離運動估計獲取的運動矢量中攝像機的上下震動和隨機擺動,并對其進行補償,從而獲得穩定流暢的視頻。
毫米波雷達是通過發送和接收電磁波的參數來計算目標的各個參數,包括距離、角度、相對速度和方位信息等。在露天礦山這種復雜的行車環境中,毫米波雷達的測量值可能來自目標車輛等動靜態障礙物,也可能來自于其他干擾物,還可能出現虛假目標。同時,由于礦卡自身的顛簸,會引起探測目標信息出現不同程度的波動,首先通過設定橫向距離區分閾值對目標障礙物與該車運動方向進行判斷,并運用運動方向最近距離的原則來對有效目標進行初選;其次,運用Kalman濾波方法預測目標信息,并設定最大容許誤差,對初選目標信息和目標信息預測值進行一致性檢驗,采用有效目標生命周期法,通過主要參數的變化規律和目前狀態來對生命周期的每個階段進行設置,并更新相應的目標信息、目標預測跟蹤以及目標更換決策,從而實現對有效目標物的準確選取。有效避免虛假目標、干擾目標及礦卡擺動和顛簸造成的影響。
超聲波雷達是通過超聲波發射裝置向外發出超聲波,并通過接收器收到超聲波時的時間差來測算距離。超聲波測距常用的方法是采用往返時間檢測法,超聲波在空氣中的傳播速度為v,根據計時器記錄的時間t就可以計算出發射點到障礙物的距離s=vt/2。需要考慮溫度(T)對超聲波在空氣中傳播速度的影響,通過超聲波在介質中的傳播速度加以修正,以減少誤差(v=331.4+0.607T)。可以通過掃描良好地對近距離內其他傳感器的盲區進行彌補。
2.2 定位技術
對自動駕駛系統來說,使用高精度地圖進行定位是必不可少的,通過車載GPS、INS、LiDAR或攝像頭等多種傳感器來采集道路的各類信息,不僅提供了精準的定位、輔助環境感知,而且還擁有更加豐富的道路路況信息,讓自動駕駛礦卡獲得自身確切的位置。在自動駕駛系統中定位技術是采用GPS與INS組合導航技術,系統組合原理如圖2所示,根據加速度計與陀螺儀的輸出對慣導的累計誤差進行補償修正,通過四元數法解算出IMU的姿態,再根據IMU與礦卡間的相對角度就可以解算出礦卡的姿態角。融合慣導解算得到的定位信息與GPS的定位信息,通過卡爾曼濾波算法計算得到的差值的誤差,從而對組合導航系統進行反饋修正,有助于提高定位精度,增強定位系統的魯棒性。可以不依賴于任何外部信息,全天侯、實時輸出礦卡的各種導航參數,包括位置、速度、姿態、加速度以及角速度等,具有數據更新率高、短期精度和穩定性好等特點,以便于自動駕駛礦卡能夠根據相關信息精確地輸出分析決策。
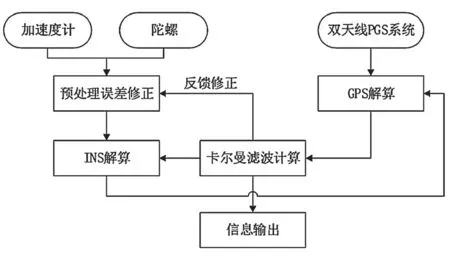
圖2 系統組合原理圖
2.3 安全通信技術
在自動駕駛礦卡作業的過程中,礦車與周邊環境之間存在大量文字、語音、數據以及圖像等信息的實時交換,通信系統是自動駕駛系統獲取和傳遞信息的神經中樞,借助5G高速率、低延遲和廣連接等特點為智慧礦山搭建一個高安全性、高可靠性、低延遲且可以實時傳輸的網絡平臺,實現對當前自動駕駛技術通信系統的優化,提升數據傳輸速率、傳輸時延,實現了終端融合、技術融合、網絡融合和業務融合。
2.4 分析決策技術
對智能分析決策技術來說,人工智能和大數據分析起關鍵作用,其核心思想就是“模仿人的思維”進行判斷。根據礦卡所安裝的傳感器對作業場景中多類型動、靜態障礙目標的感知反饋信息,結合自動駕駛礦卡集群調度系統指令,提出多目標分類避障規劃。重新對智能感知所得到的各類動靜態障礙物進行類別劃分,對各類傳感器所采集的信息進行融合分析,綜合考慮礦卡在運輸過程中的各項成本,通過蟻群算法和遺傳算法混合算法(如圖3所示)學習外界場景信息,再由策略庫進行動作部署,結合礦卡車輛動力學,規劃出局部空間和時間內礦卡的最優運動軌跡。
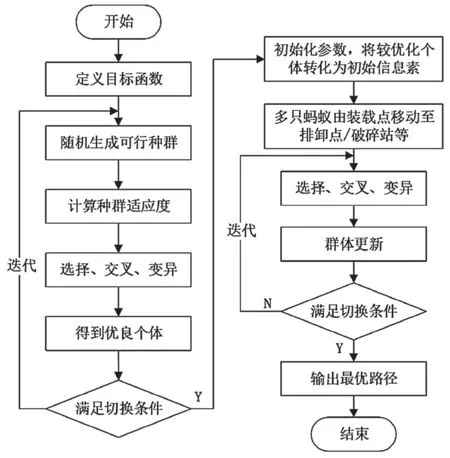
圖3 混合算法流程圖
2.5 智能調度技術
露天礦山智能調度以高精度定位、實時稱重和大數據分析為主要手段,通過采集生產設備的動態信息,實時監控和優化調度礦卡、電鏟等設備的運行,結合露天礦山實際場景及施工成本,不同的動、靜態障礙物應通過相應的避障算法采取不同的避障行為。同時對部分動態障礙物(例如施工區域內同時工作的其他礦卡)需要結合自動駕駛礦卡集群調度系統指令,根據“工作優先級”的避障方法,對特殊的靜態障礙物(礦卡無法直接通過),需要發送繞行指令,并由礦卡路徑規劃算法規劃新路徑,完成避障操作。在與礦卡運輸相關聯的多信息系統數據充分融合的基礎上,通過技術融合和流程信息化再造實現礦卡運行的無人化調配、礦卡數據的統計分析以及智能化管控,進而優化生產,提高資源利用率。當礦卡出現裝載點停車偏差、系統故障等異常情況時,調度員可以通過遠程操縱進行處理,及時應對生產中出現的緊急情況或突發事件,以實現及時響應生產、及時調整生產和安全生產的目標。
2.6 控制執行技術
自動駕駛控制技術的核心工作是將系統穩定在最佳設定值,控制機構如圖4所示,將駕駛員操縱的轉向、油門、轉速、制動以及箱體舉升等動作經過傳感器轉換為電信號,通過電控動力驅動直接控制執行,分為縱向控制和橫向控制,縱向控制是對行駛速度的控制以及對礦卡自身速度、與前后車或障礙物距離的自動控制,包括加速控制單元和減速控制單元。橫向控制是垂直于行駛方向的控制,即轉向控制單元和控制車輪轉向角。在不同的車速、載重以及路況下,保證車輛的穩定性,通過線控改造礦卡的執行器,結合決策規劃信息直接通過底層執行器控制算法對電機驅動、發動機和制動系統發送控制指令,分層、分級和分區的多套控制,調節車輛行駛速度、位置和方向狀態,保證自動駕駛礦卡的安全性、操縱性和穩定性。
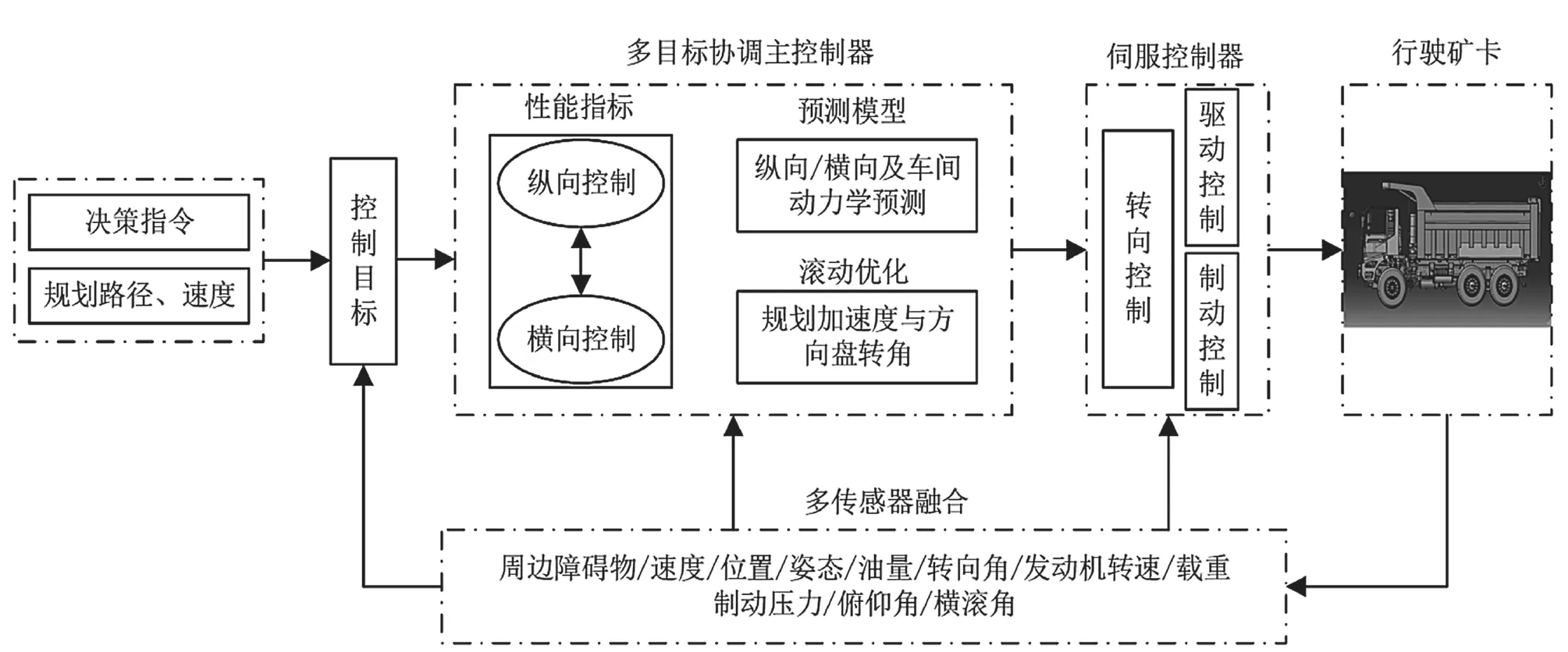
圖4 自動駕駛智能控制機構圖
3 結語
隨著人工智能、5G通信技術、計算機視覺技術以及多傳感器融合技術等學科的快速發展,國家宏觀政策特別關注礦山無人化的建設,我國很多礦山企業與高科技公司、設備廠家以及通信公司一起進行深度合作,共同研發更適合露天礦山的自動駕駛技術系統,真正實現機械化換人、信息化減人以及智慧化無人的目標。相信在不久的將來,露天礦山的自動駕駛技術會得到更好的發展與推廣。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代出版(2020年3期)2020-06-20 07:10:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46