分布式驅動電動車自抗擾控制電子差速研究
2021-10-28 10:35:38任周強
汽車實用技術 2021年19期
任周強
(長安大學 汽車學院,陜西 西安 710064)
引言
傳統汽車在轉彎行駛過程中時,采用機械差速器實現內外側車輪之間的差速轉向,而分布式驅動電動汽車采用的是輪轂電機直接驅動車輪,因此采用電子差速代替傳統的機械差速器,所謂電子差速是通過電控方式控制轉向時各個車輪的速度,來保證車輛在轉向過程中各輪以純滾動方式運動。目前,電子差速的控制方式主要有兩種,一種是基于轉矩的電子差速控制,另一種是基于轉速的電子差速控制。本文設計了一種基于自抗擾控制器的差速控制策略[1],通過阿克曼轉向模型[2]獲取轉向工況中各車輪的理想轉速,采用自抗擾控制器對車輪的實際轉速進行控制以追蹤理想值。自抗擾控制[3]作為一種新型控制技術,能對系統運行過程中收到的復雜擾動實時估算并補償,適用于非線性系統,應用于電子差速控制中具有較好的效果。
1 車輛轉向運動學模型
假設汽車是一個剛體,則汽車轉彎時滿足阿克曼模型。依據阿克曼轉向模型,如圖1所示,4個車輪的瞬時轉向為O。其中,δ為車輛轉向角,δ1為左前輪轉向角,δ2為右前輪轉向角,l1為質心到前軸的距離,l2為質心到后軸的距離,d為輪距,R0為車輛轉向半徑;Ri(i=1,2,3,4)為驅動輪繞瞬時轉向中心O的轉向半徑。
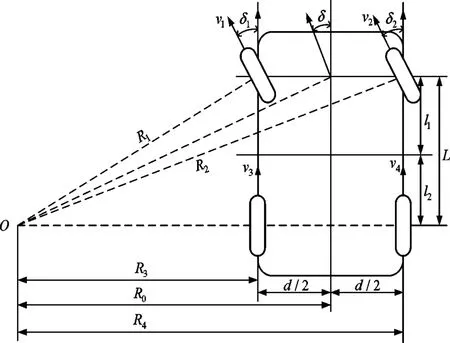
圖1 阿克曼轉向模型
車輛轉向角δ作近似計算:

由阿克曼模型圖可以得到當前車輛轉向角δ與各車輪理想轉向半徑Ri(i=1,2,3,4)之間的關系:
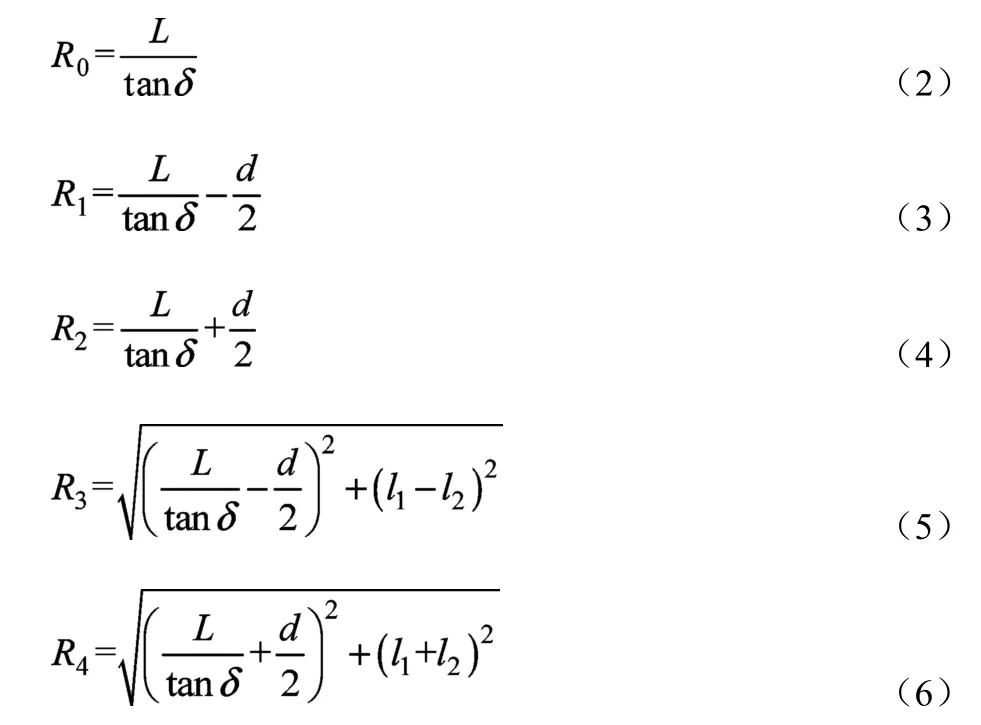
若車輪滾動半徑為r,各個車輪在轉向過程中繞瞬時轉向中心O的期望轉速,即電機轉速為:

2 基于輪速的自抗擾控制器設計
2.1 輪速跟蹤微分器
輪速跟蹤微分器(TD)的作用是完成對輸入信號的跟蹤,提取含有隨機噪聲的輸入信號及其微分信號,在保證快速性的同時減少跟蹤信號的超調和振蕩,理想輪速ωref的跟蹤微分方程為:
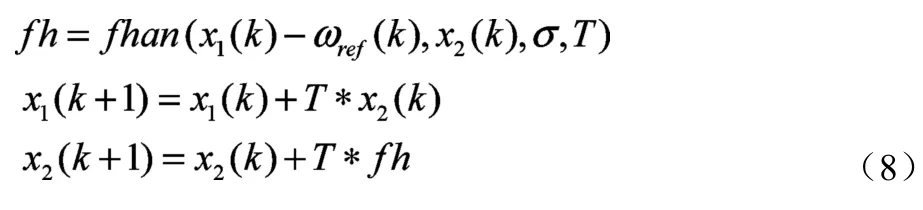
式中,T為采樣周期;ωref(k)為第k時刻的輸入信號;σ為決定跟蹤快慢的參數;fhan(.)函數為最速控制綜合函數,描述如下:
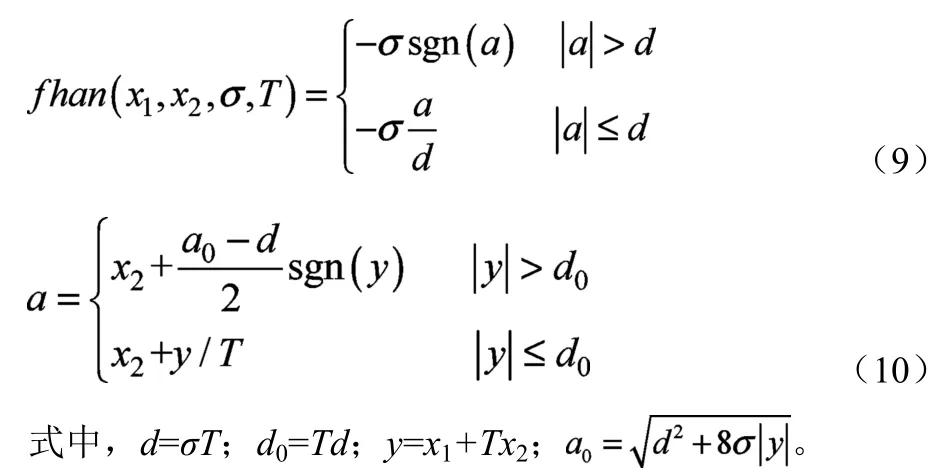
輸入信號為ωref(k),采用式(1)可實現x1(k)→ωref(k),x2(k)→ωref(k),如果ωref(k)是帶有噪聲的信號,微分器可同時實現濾波。
2.2 輪速擴張觀測器設計
擴張觀測器(Extended State Observer, ESO)的特點是估計系統內外擾動的實時作用值,并在反饋中給予補償,用補償的方法消除擾動的影響,從而具有抗干擾的作用。實際輪速ωi的擴張觀測方程為:
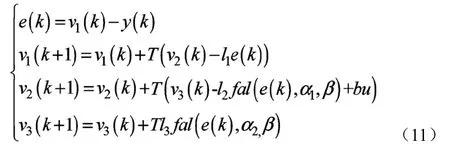
式中,y(k)為輸入信號,也就是車輛運動過程中的實際輪速;v1(k)為對輸出的估計;v2(k)為對象輸出的估計值的一階導數;v3(k)為對系統總擾動的估計;l1、l2、l3為非線性最優綜合控制函數fal的系數,其值決定了ESO對狀態變量的估計效果;β為fal函數的濾波因子;fal(.) 函數為非線性函數,描述如下:
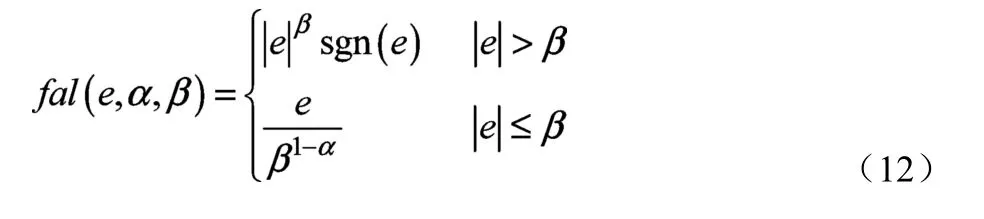
式中,δ為fal(e,α,β)函數線性段的區間長度;sgn(.) 為符號函數;α為可調參數代表了函數增益。
2.3 輪速非線性狀態誤差反饋控制器設計
傳統的PID控制形式為誤差的現在(P)、過去(I)以及將來(D)的線性組合,這種組合顯然具有局限性,可以在非線性范圍內尋找更有效的組合形式,本文設計了一種PD形式的非線性組合,控制方程可表示為:

式中,0<α1<1<α2;kp=ε1;kd=ε2;e1為理想輪速與實際輪速估計值之差;e2為理想輪速信號微分與實際輪速微分輸出之差。
2.4 基于輪速的電子差速自抗擾控制結構
基于上面所設計的微分跟蹤器、擴張狀態光測器和非線性狀態誤差控制器,我們以通過阿克曼轉向模型所計算出的車輛轉向過程中的理想車輪轉速ωref和通過輪速傳感器所獲得的實際輪速y作為輸入,搭建二階非線性自抗擾控制器,其結構如圖2所示。
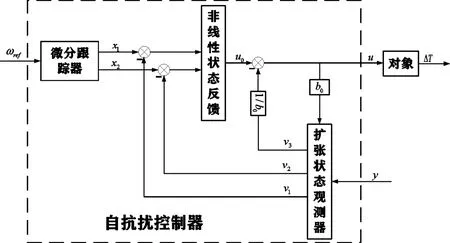
圖2 自抗擾控制器結構
3 基于輪速的電子差速控制策略
為了實現分布式驅動電動汽車的差速轉向,本文設計了基于車輪轉速的電子差速控制策略,如圖3所示。在車輛轉向過程中,基于當前車速v與前輪轉角δ通過阿克曼理想轉向模型計算出車輛轉彎時4個車輪所需的理想轉速,將計算所得的理想輪速與輪速傳感器所采集的實際輪速作為自抗擾控制器的輸入,調節后的輸出作為輪邊驅動電機的輸入來調節驅動轉矩,最后輸入到整車模型,從而通過自抗擾控制器完成對每個車輪理想轉速的速度跟隨,實現分布式驅動電動汽車的差速控制。
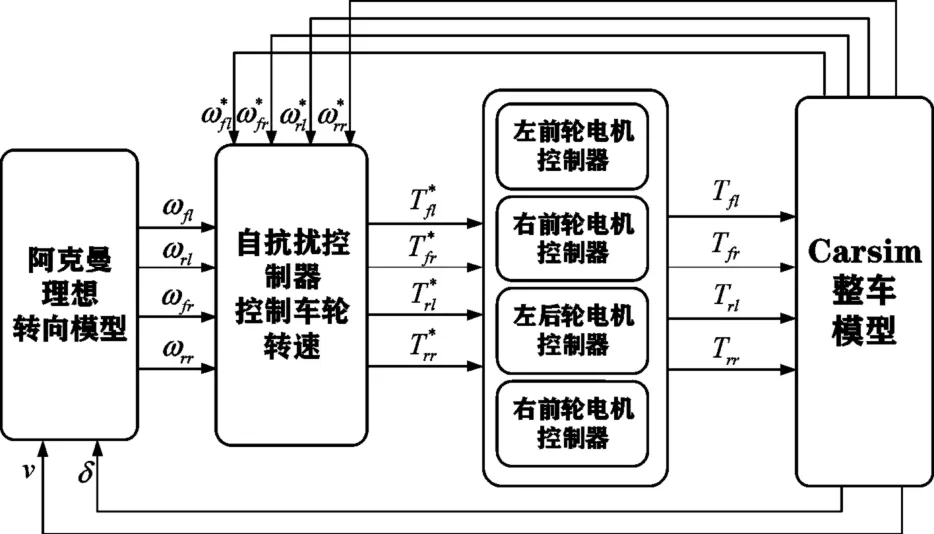
圖3 電子差速控制策略
4 仿真試驗驗證
為了驗證差速控制策略的正確性。我們在40 km/h的車速下分別進行方向盤正弦輸入和雙移線仿真實驗。當方向盤轉為正弦輸入時,仿真實驗結果如圖4、圖5所示;雙移線工況下的仿真試驗結果如圖6、圖7所示。
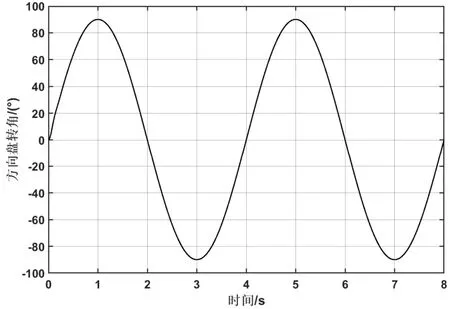
圖4 方向盤轉角輸入曲
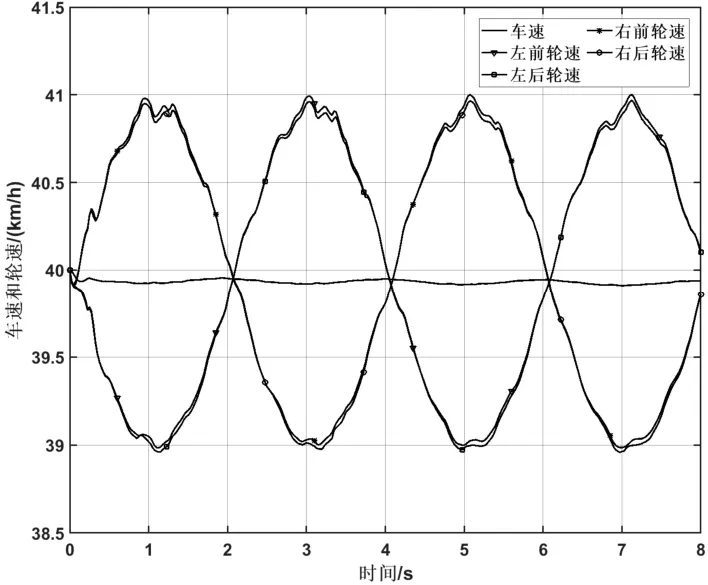
圖5 正弦輸入下車速及輪速變化曲線
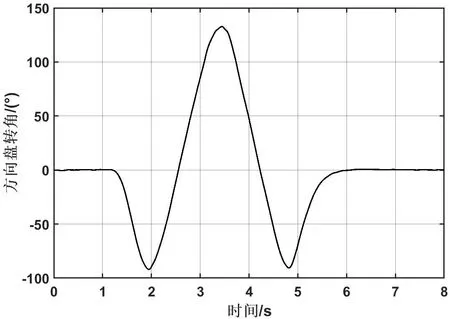
圖6 方向盤轉角輸入曲線
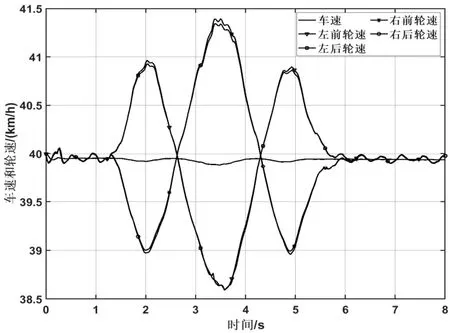
圖7 雙移線輸入下車速及輪速變化曲線
從圖5和圖7可以看出,車輛在40 km/h的車速,轉向盤轉角分別為正弦輸入和雙移線輸入的工況下,左右側車輪均可跟蹤到基于Ackermann-Jeantand 模型所計算的各輪理想輪速,實現車輛在轉彎行駛下的差速控制。通過兩種轉向工況下的仿真試驗,表明Ackermann-Jeantand 轉向模型與自抗擾控制的結合在分布式驅動電動汽車的轉向過程中具有良好的差速控制效果。
5 結束語
為了實現分布式驅動純電動汽車轉向時的電子差速控制,本文基于Matlab、Smulink與CarSim建立分布式驅動電動汽車模型,根據Ackermann轉向模型設計了基于自抗擾控制的輪速控制器。最后,建立Carsim與Simulink聯合仿真,選擇方向盤正弦輸入和雙移線輸入來對車輛的差速控制進行 仿真驗證,仿真結果表明在轉彎時,我們所設計的基于自抗擾控制的輪速控制策略實現了轉彎時過程中差速控制功能,證明了控制策略的可行性和合理性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
核科學與工程(2015年4期)2015-09-26 11:59:03
