過煤量激光圖像智能監測技術研究
2021-11-02 12:25:38楊光耀毛開江胡而已李夢雅
中國煤炭 2021年10期
楊光耀,毛開江,胡而已,,李夢雅
(1.陜煤集團榆北煤業小保當礦業有限公司,陜西省榆林市,719300;2.應急管理部信息研究院,北京市朝陽區,100029;3.中國礦業大學機電工程學院,江蘇省徐州市,221116)
0 引言
帶式輸送機承擔著礦井原煤輸送的重要任務,作為煤礦主運輸系統的關鍵裝備,其運行狀態和運量監測對煤礦安全高效生產具有重要意義[1]。近年來,隨著煤礦智能化建設的不斷推進,主運輸系統智能化、無人化已成為未來技術發展的主流方向,為了實現帶式輸送機的狀態智能感知和運速精準調控,需要對其運輸過煤量進行實時監測[2],從而最大限度地避免帶式輸送機過載或空轉,做到多拉快跑、節能降耗。目前,國內外學者針對這一問題已開展了部分基礎性研究[3],但由于煤礦井下極端惡劣的工況條件,給帶式輸送機過煤量精準監測帶來了巨大挑戰。
李紅偉[4]測量了主運輸煤流的寬和高這2個參數,在滿足精度的前提下使檢測方法簡單、穩定。陳湘源[5]設計了一種基于超聲波的帶式輸送機多點煤流量監測系統,利用超聲波傳感器獲取帶式輸送機高速運行下的煤高、煤堆截面積等參數信息。楊育坤[6]提出了一種基于激光測距原理的帶式輸送機煤流量檢測的設計方案,利用激光測距儀采集輸送帶表面和煤流的橫向輪廓數據,并實時計算煤流量。郭偉東等研究人員[7]提出了一種基于機器視覺的礦井輸煤系統優化節能控制方法,利用實時煤流圖像來獲得瞬時煤流量。代偉等研究人員[8]利用小波變換和K-means算法分別對煤炭圖像進行增強和分割,然后通過Delaunay算法與T-S模糊推理算法計算出煤流相關信息。李克偉[9]基于激光三角測距原理對煤量測量進行了相關研究,開發了煤量測量算法。Schoch[10]設計了一種新型的基于激光三角測量的坐標測量系統,能夠對復雜形狀零件在高溫下進行整體三維測量。
綜上所述,目前針對煤流量測量的研究中涉及激光圖像處理的研究相對較少,本文采用直射式激光三角測量原理,進行了激光過煤量監測圖像處理算法研究,并通過提前對采集的圖像進行清晰度評價,提高測量精度。
1 激光直射測量原理
激光發射器固定在被測物體正上方,激光線垂直投射于被測物體表面,相機則固定在斜上方與激光器成一定夾角。激光器射出的光線遇到被測物體反射到相機的圖像傳感器上,圖像傳感器上光點的位置與被測物體高度具有唯一的對應關系。由幾何光學關系可知,根據圖像傳感器上光點移動的距離便可得到被測物體的深度信息。直射式激光三角測量原理如圖1所示。

圖1 直射式激光三角測量原理
圖1中,CA為激光線的入射光路,β為入射光CA與反射光AB之間的夾角,該夾角可由角度傳感器測得;h表示三維坐標系下被測物體的實際高度;H表示鏡頭中心與載物參考面之間的垂直距離;相機光軸與圖像傳感器交于O1點,OO1表示CCD相機成像中心與鏡頭之間的距離;O1C1表示CCD相機成像平面上激光點相對于基準參考圖像的光斑偏移距離,D點為C點相對OA直線的垂足點。
根據三角形相似原理,可知△BOC~ △O1OC1,則待測物體表面的激光光斑點C距離鏡頭軸線的垂直距離見式(1):
(1)
式中:OD——垂足點D距離鏡頭的距離,m;
OA——參考平面上的激光光斑點A距離鏡頭的距離,m;
DA——垂足點D距離參考平面上激光光斑點A的距離,m。
在△ACD中,設被測物體實際高度AC=h,則有DC=h·sinβ,同理可得DA=h·sinβ。

(2)
2 實驗系統設計
2.1 實驗系統整體架構
實驗系統由硬件和軟件組成,硬件主要包括相機、鏡頭、激光器等;軟件主要包括圖像處理、參數測量等。基于視覺原理進行堆煤參數實驗測量系統的整體設計,設計方案框架如圖2所示。

圖2 實驗測量系統設計方案框架
為了保證系統的安全性,需要將視覺測量系統置于密閉性較好的隔爆殼中。相機和激光器分別固定在型材骨架的移動機構和旋轉機構上,便于調整相機與激光器之間的距離和激光器相對于豎直平面的角度。因實驗室環境無需防爆,同時為方便實驗測量,去除防爆箱體,并采用支架代替懸掛裝置。選擇加工公司進行實驗臺架加工,最終搭建的實驗測量系統裝置如圖3所示。
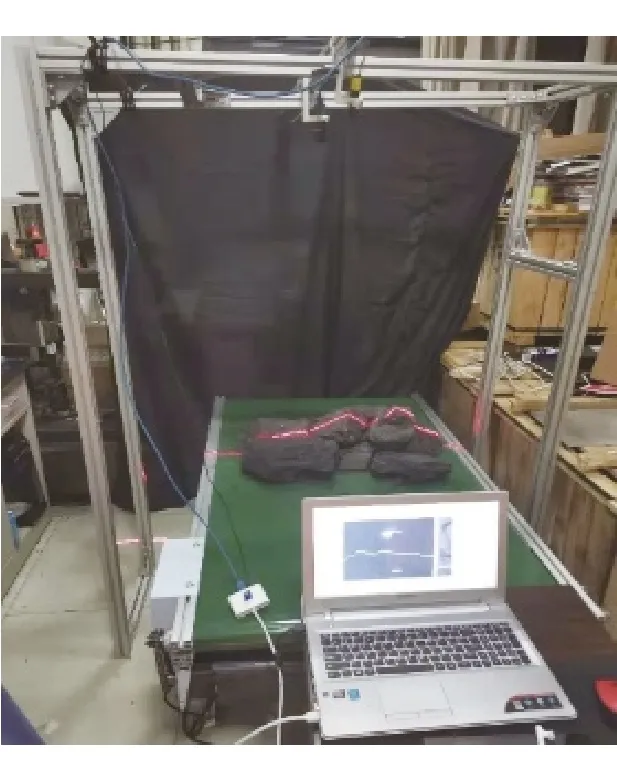
圖3 實驗測量系統裝置
2.2 圖像采集裝置選型
相機的傳感器類型、數據接口、分辨率和鏡頭的焦距、光圈、景深等參數均會影響煤流參數測量的精度[11-12]。相機的傳感器類型主要有CCD與CMOS這2種,這2種傳感器各有優點。其中,CCD相機的噪聲系數低、填充系數高,而CMOS相機的結構簡單、數據傳輸快、讀取速度快、動態范圍大。工業相機常用的數據接口主要有GigE與USB 3.0,USB 3.0接口的相機數據傳輸速率可以達到5 Gbps,是GigE的4倍,且無需外加輔助設備,成本低、效率高。
本文研究對象為帶式輸送機上動態煤流,為了能夠更快地處理和傳輸數據,提高處理效率與檢測精度,選用CMOS傳感器、USB 3.0數據傳輸接口的相機更為合理。另外,相機分辨率越高,像素越密集、圖像越清晰、檢測精度也越高,但同時價格也更昂貴,成本更高。光學鏡頭的焦距是指鏡頭的光學中心到成像面焦點的距離,是鏡頭選型最為重要的參數指標,可根據工作距離、視角確定,但鏡頭失真現象隨著焦距的減小而增大,特別針對本研究中存在圖像測量工作,失真現象越小越好,因此不考慮選擇小于8 mm的小焦距鏡頭。
本文選擇研究運輸過程中帶式輸送機上的堆煤參數,實驗用帶式輸送機寬為80 cm,高為50~70 cm。綜合本文視覺測量系統需要完成對帶式輸送機上煤堆輪廓方面測量的具體情況,并根據上述硬件選型依據,選用了CMOS傳感器類型、USB3.0數據傳輸接口、分辨率為1920×1200像素的MER-230-168U3M/C面陣相機和焦距為12.5 mm、最大光圈比為1∶1.4、光圈系數可調范圍為f1.4~f16的V1214-MP鏡頭進行組合。
2.3 激光光源選型
選用合適的照明裝置是機器視覺測量系統的重要一步,視覺系統中常用的光源及其相關特性[13]見表1。
由表1可以看出,激光光源的方向性強、亮度高、平均壽命長等特點適合用于煤礦井下復雜環境。因此,本文選擇24 V的SL-660-130-S-C-45激光器作為此視覺測量系統的光源,其波長為660 nm。

表1 常用的光源及其相關特性
2.4 實驗系統軟件設計
在機器視覺的圖像處理領域,軟件系統的運行穩定性、執行效率、開發周期至關重要。其中,HALCON是被廣泛使用的機器視覺軟件,它提供了一些助手和可視工具以及編程提示,具有使編程和修改變得容易、開發周期短、開發成本低、穩定性好、支持多種操作系統和多種編程語言等特點。基于本文的需求,軟件平臺采用HALCON算法庫進行圖像處理,利用VS2010對帶式輸送機參數的實時監測進行人機交互界面設計。
3 激光圖像處理技術
3.1 圖像清晰度評價
在實驗過程中,由于光照不均勻等因素的影響,使得采集到的圖像質量也好壞不一,為了提高測量精度,在進行測量前需要對采集圖片進行清晰度評價[14]。
由于清晰的聚焦圖像比模糊的離焦圖像中特征邊緣更銳利、邊緣像素的灰度變化更大,因此具有更大的梯度值,那么可以基于梯度對圖像進行清晰度評價,常見的梯度函數有EOG能量梯度函數、Tenengrad函數、Variance方差函數、拉普拉斯Laplace函數等。另外,可以將空域中的圖像轉換為頻域進行清晰度評價,頻域可以更方便地分析圖像頻率分布信息,其中DCT離散余弦變換函數是常用函數之一。基于信息熵也可構造清晰度評價函數,因為聚焦圖像中的像素灰度分布多樣性更大,像素灰度值分布的區間更廣,即熵值更大,常用函數為entory函數。基于統計學的清晰度評價函數有Range函數,是基于灰度直方圖中灰度帶的變化大小進行統計學分析,最終反映出圖像清晰度。
為了選擇最優的清晰度評價函數,隨機選擇采集圖像中的9幅,通過上述7種圖像清晰度評價函數對這9幅圖像進行評價,不同函數清晰度評價結果如圖4所示,不同函數清晰度評價均值見表2。

圖4 不同函數清晰度評價結果

表2 不同函數清晰度評價均值
如圖4所示,采用Laplace函數、DCT函數和Range函數進行圖像清晰度計算的結果偏差較小、靈敏度較高。又根據表2中不同函數清晰度評價均值可知,Range函數比其他清晰度評價函數的歸一化均值都大。針對本研究的圖像模型,在7種不同的圖像清晰度評價函數中,Range函數的單峰性最好,歸一化均值最大,無偏性與靈敏度也較高,是最優的圖像清晰度評價函數。此外,在實際計算過程中Range函數也最為簡單。綜上所述,采用Range函數對采集的所有圖像進行圖像清晰度評價。根據最終評價結果選擇最優幀圖像進行煤流截面輪廓的測量,最優幀圖像如圖5所示。
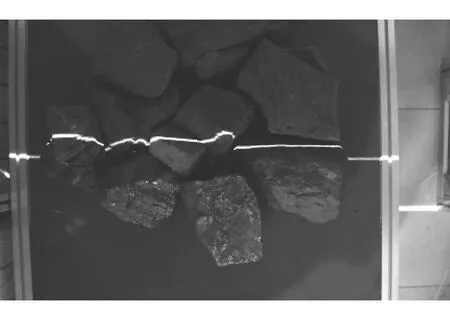
圖5 最優幀圖像
3.2 圖像預處理
煤礦井下復雜的工作環境會對工業相機拍攝的照片帶來嚴重噪聲,這會嚴重影響煤堆截面激光線輪廓的清晰度,因此需要對采集的圖像進行濾波去除由環境等因素造成的模糊,提高圖像的抗干擾能力。中值濾波是一種能夠有效抑制噪聲的非線性處理技術,可以有效消除圖像中的孤立點。 濾波后圖像直方圖中的灰度值主要集中在低亮度級的一個窄區域,這對于圖像的邊緣檢測以及特征提取是及其不利的。為了提高圖像對比度,加快圖像處理的效率和提高測量精度,還需要對圖像進行圖像增強。
4 煤流截面輪廓計算
4.1 激光條紋有效區域分割
為了提高激光中心線的提取精度和效率,需要分割出包含激光中心線的有效區域,其中邊緣檢測和閾值分割是有效區域分割兩個關鍵步驟。目前,John Canny[15]提出的一種新的邊緣檢測算子被廣泛使用于圖像的邊緣檢測,通過HALCON算法庫中edges_sub_pix()算子可以實現,獲取的煤堆上激光線輪廓邊緣如圖6所示。
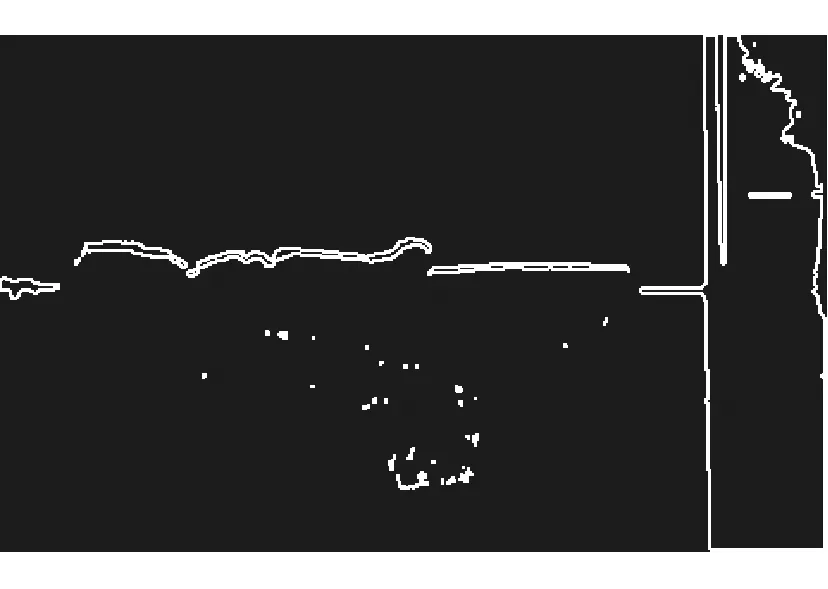
圖6 激光線輪廓邊緣
采用threshold()算子進行閾值分割,將背景與目標分離,由于光照等因素的影響使目標區域中夾雜著一些無用信息,因此需要使用connection()算子將一幅圖像分割成一組任意的、不相連的區域,然后基于區域橫縱坐標等因素剔除無效背景,僅留下激光線所在的有效區域,并通過Union1()算子合并區域,圖像分割最終效果如圖7所示。
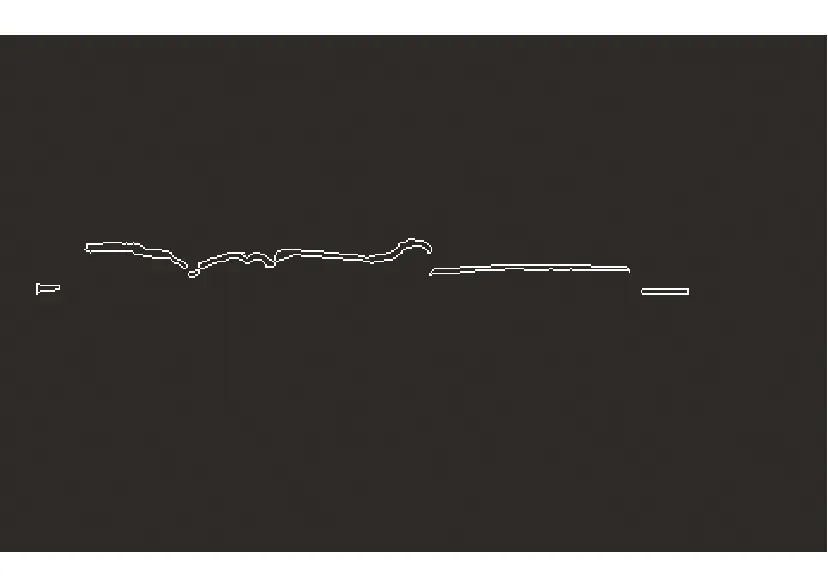
圖7 圖像分割最終效果
4.2 激光中心線提取
采用常用的灰度重心法、Hessian矩陣法和區域骨架法這3種不同方法,分別進行中心線提取,每一種激光條紋中心線的提取算法各有利弊,考察每種算法的提取速度、提取精度、復雜度、方向性等特點,對其不同算法進行總結對比,對比結果見表3。
從表3可以看出,灰度重心法和Hessian矩陣法提取條紋中心線都比較復雜,并且灰度重心法的方向性和斷點擬合效果都比較差;Hessian矩陣法由于復雜度的影響,導致中心線提取的效率較低,且會丟失部分激光線的細節;區域骨架法提取激光中心線精度和效率都比較高,且算法較為簡單,因此本文采用區域骨架法來提取激光中心線。

表3 不同中心線提取結果對比
4.3 條紋斷線修補
基于區域骨架的提取算法因環境和煤塊自身特征等因素,使得打在煤堆上的激光線不可避免地發生斷裂,因此需要對斷裂處進行修補。采用三次樣條插值法和形態學處理法2種方法進行斷點修補的效果如圖8所示。
由圖8可以看出,基于形態學處理的算法很好地擬合了激光中心線的斷裂,且不改變激光條紋形狀,并兼顧了測量精度,因此本文采用形態學處理法來進行斷點修補。
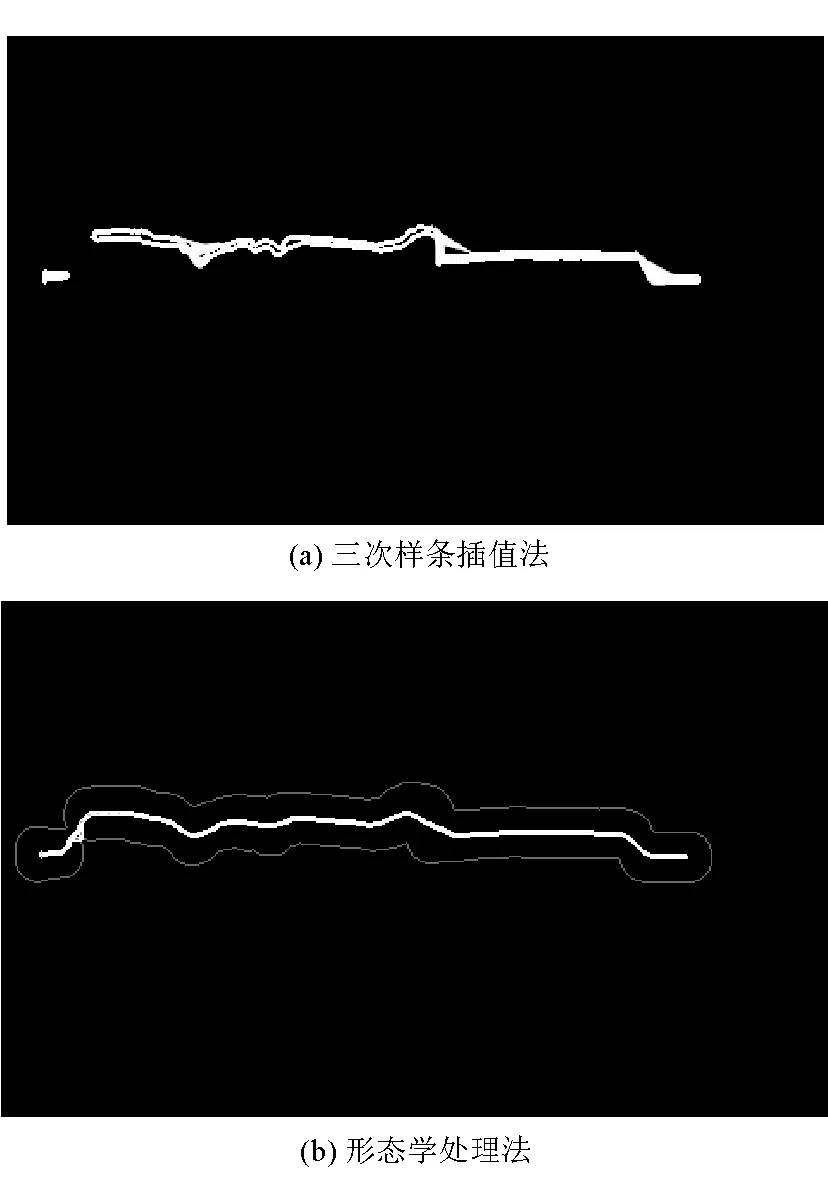
圖8 不同方法斷點修補的效果
5 煤流量實驗測量
基于上述圖像處理算法和實驗系統布置,通過圖像系統獲取在帶式輸送機空轉下的激光中心線作為基準線,然后在帶式輸送機上放置煤樣并進行圖像實時采集,獲取不同幀下煤堆的中心線,并顯示在一張界面上構成封閉圖形,堆煤輪廓線如圖9所示。

圖9 堆煤輪廓線
在實驗室環境中對帶式輸送機上堆放不同數量的煤堆分別進行三維形貌的重建,煤流輪廓三維重建效果如圖10所示。
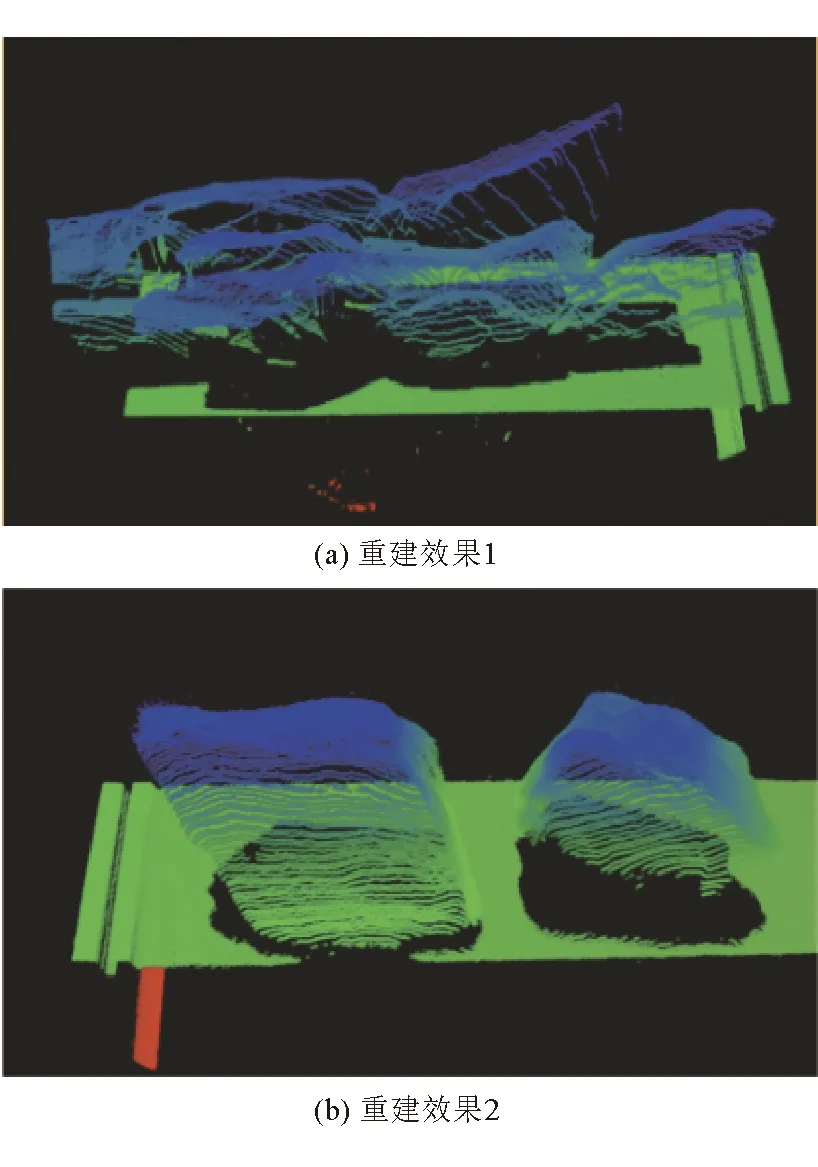
圖10 煤流輪廓三維重建效果
由圖10可以看出,帶式輸送機上煤堆的三維重建結果和煤塊顆粒大小、煤塊顆粒的梯度以及煤塊間的間隙有關,若煤塊的梯度較大或者煤塊顆粒間的間隙較大,重建的三維輪廓無法形成無斷裂的煤堆形狀包絡線。
6 結語
基于激光三角法原理開展了煤堆截面輪廓的在線測量,取得的進展如下。
(1)根據視覺測量原理和實際工況設計了煤流多參數在線測量系統,針對煤堆輪廓圖像進行預處理提高圖像的對比度。
(2)針對圖像增強后的煤堆輪廓圖像進行了有效區域的分割和中心線提取操作,提高了激光中心線的提取效率。
(3)針對中心線提取過程中存在的斷裂現象,進行了不同的斷線修補操作,發現形態學處理法進行激光線斷點連接不改變激光條紋細節且擬合完整。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51