基于限幅函數的永磁同步電機模糊PID調速控制系統
2021-11-05 06:36:38張堂玉龍祖強許岳兵馬凌峰
衡陽師范學院學報 2021年3期
張堂玉,龍祖強,許岳兵,馬凌峰
(衡陽師范學院 物理與電子工程學院,湖南 衡陽 421002)
在“工業4.0”的智能化時代,永磁同步電機正朝著智能化、數字化的方向發展。從市場數據來看,中國伺服市場的規模依舊處于上升的趨勢,但在性能方面距離國際領先水平還有一定的距離,高端的伺服技術幾乎被外來企業壟斷。“高精度、高速度、高頻響、智能化”是伺服技術永恒的主題。為了順應伺服技術的主題,國內外的研究者們相繼提出了不同的算法來提高伺服電機的控制精度。李添幸等提出了一種永磁同步電機模糊控制系統,解決了傳統PID控制系統在驅動電機過程中出現的轉矩脈動大的問題,但轉速響應仍然較慢[1]。孫靜等設計了一種永磁同步電機模糊PID控制系統,提高了系統的響應速度,但系統抵抗外界的干擾能力較低[2]。丁文雙等搭建了一種永磁同步電機模糊PID自適應調整參數的控制系統,提高了系統的靈活性,但轉速環的控制精度較低[3]。梁艷等提出了一種永磁同步電機的新型矢量控制算法,實現了電機的驅動,但轉速曲線存在擾動[4]。為了提高永磁同步電機調速控制系統的響應速度和減少電流波形的總諧波失真程度,本文采用限幅函數和模糊PID以及比例因子串聯控制器的速度外環控制方法,并采用模糊PI控制器的電流內環控制方法,以實現對轉速的精準控制。將從系統的穩定性、限幅函數的功能、仿真實驗效果等三個方面分別闡述該方法的有效性。
1 閉環控制系統的穩定性分析
閉環控制系統包括速度外環和電流內環。首先對電流內環進行分析:電流內環由PI模塊(模糊PI的等效代替)、中央處理器模塊、逆變器模塊和電機模塊組成。電流內環結構如圖1所示。

圖1 電流內環結構
其中中央處理器模塊為延遲環節,td=Ts。逆變器模塊為慣性環節,kpwm為逆變器的增益,這里取kpwm=1。中央處理器模塊和逆變器模塊可以合成簡化為:

忽略動態項和耦合項后得到定子電壓方程為:

對式(2)進行拉普拉斯變換得到電機的傳遞函數為


在研究速度外環時,電流內環可以近似為一階環節[5]。模糊PID簡化為PID環節,電流內環和中央處理器模塊合成簡化為

其中Ts2=4Ts,速度外環結構如圖2所示。

圖2 速度外環結構

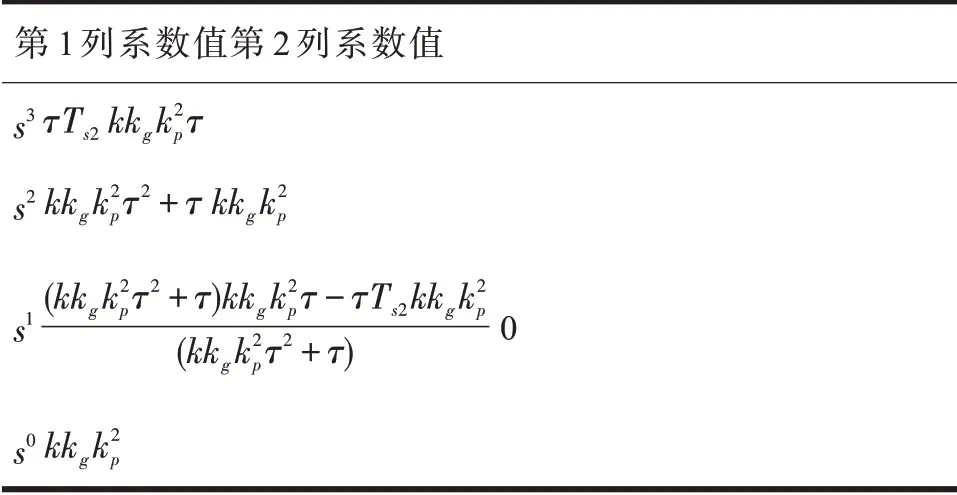
表1 勞斯表
2 限幅函數的功能分析
2.1 限幅函數的FFT分析
三相電流是指在永磁同步電機定子的三相對稱繞組上通入的正弦交流電。理想的三相交流電會使電機內部產生理想的旋轉磁場,從而使電機轉動。由于逆變器具有非線性的特質,使得永磁同步電機三相電流波形發生嚴重失真,從而降低了電機的轉動效率[8-9]。為了減小電流波形的總諧波失真程度(THD),引入限幅函數對輸入的速度誤差進行限幅[10-11]。根據反正切函數的單調遞增性和有界性,最終選擇k=arctan(0.07 u)函數作為本文的限幅函數。
為了驗證限幅函數的作用,在其他條件相同的前提下,采用FFT對加入限幅函數前后的電流諧波分量進行分析。FFT是一種離散傅立葉變換的快速算法,將時域信號轉換到頻域信號進行頻譜分析[12]。限幅前后電流諧波FFT分析如表2所示。
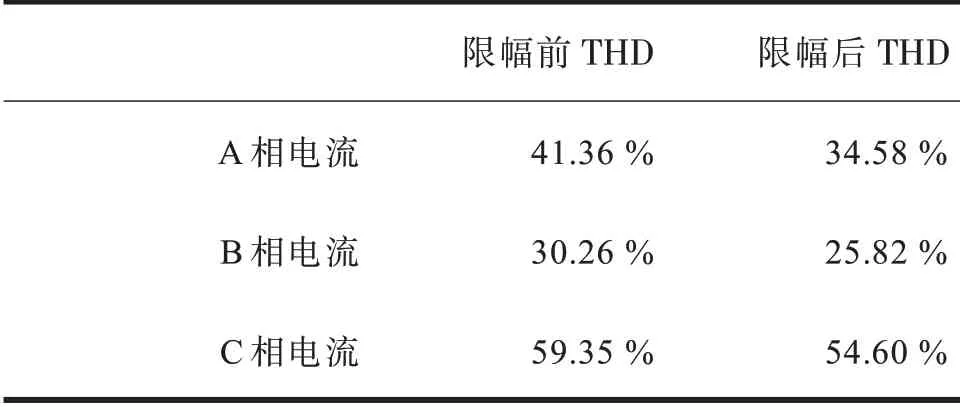
表2 限幅前后電流波形的THD對比
由表2可知:在其他條件相同的前提下,限幅函數有效地減小了三相電流波形的總諧波失真程度,從而減少了電機的損耗。
2.2 限幅函數波形分析
在Simulink中用示波器觀察限幅前后信號的波形變化,如圖3和圖4所示。
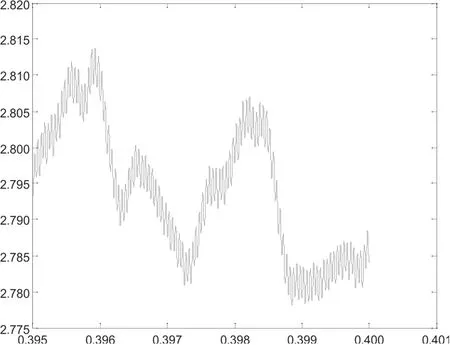
圖3 限幅前信號振蕩波形

圖4 限幅后信號振蕩波形
由圖3和圖4可知,在限幅函數的作用下,信號振蕩的峰值縮小了14倍。限幅函數很好地抑制了系統的振蕩,提高了系統的穩定性。電機在轉動時會產生大量的紋波電壓,而紋波電壓又會影響電機的性能,帶來噪聲。限幅函數可以降低紋波電壓的幅值,從而減少噪聲[13-15]。
3 模糊PID控制器的設計
電機轉速控制系統主要由速度外環和電流內環組成。電流內環和速度外環都采用了模糊算法,有效地提高了系統的魯棒性。為了降低波形的失真程度和提高系統的響應速度,選擇在速度外環采用限幅函數和模糊PID及比例因子串聯控制器,電流內環采用模糊PI控制器。
模糊PID控制是利用模糊規則對PID三個參數進行實時整定,避免了傳統PID控制需要人工反復調整參數的問題。量化因子將誤差和誤差變化率的基本論域映射到模糊論域進行模糊化、模糊推理和去模糊處理后,將kp,ki和kd輸出至PID控制器。
3.1 模糊化
給定目標轉速為1 000 r/min,模糊控制器各變量的模糊子集分別都為{NB,NM,NS,ZO,PS,PM,PB},且e和ec,Δkd的模糊論域都為[-3,3],Δkp的模糊論域為[-0.03,0.03],Δki的模糊論域為[-0.06,0.06]。模糊子集NB和PB的隸屬度函數選用S型,其他模糊子集隸屬度函數選用三角形。其中Δkp,Δki,Δkd分別為kp,ki和kd的修正值。S型隸屬度函數為

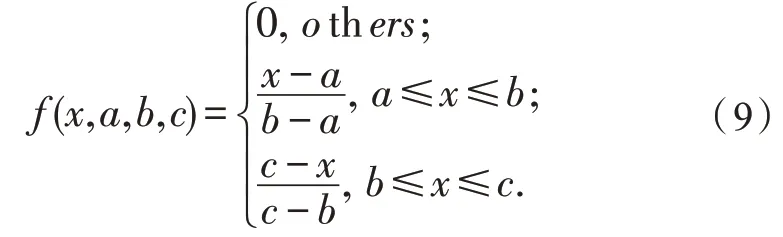
三角形隸屬度函數為:
3.2 模糊推理及模糊規則
在模糊工具箱中添加模糊規則,推理方法選用mamdani合成推理法。推理規則:當|e|取較大時,增大kp并減小kd,ki取0;當|e|,|ec|處于中等值時,減小kp且ki和kd應取適中;當|e|較小時,增大ki和kd;當|ec|較小時,增大kd;當|ec|較大時,減小kd。
3.3 去模糊化
去模糊化是指將輸出的模糊論域通過比例因子映射到基本論域中,本文選用重心法進行去模糊化。
4 實驗仿真
4.1 限幅函數的仿真實驗驗證
結合第3節限幅函數功能分析,在其他條件相同的前提下,對加入限幅函數前后的實驗效果進行仿真對比。仿真結果如圖5和圖6所示。
由圖5和圖6可知,限幅前的電流波形具有較大的諧波成分,在限幅函數的作用下,電流諧波成分顯著減少。表明限幅函數能夠顯著減少電流波形的總諧波失真程度,提高系統的穩定性,減少系統的噪聲。

圖5 限幅前三相電流波形
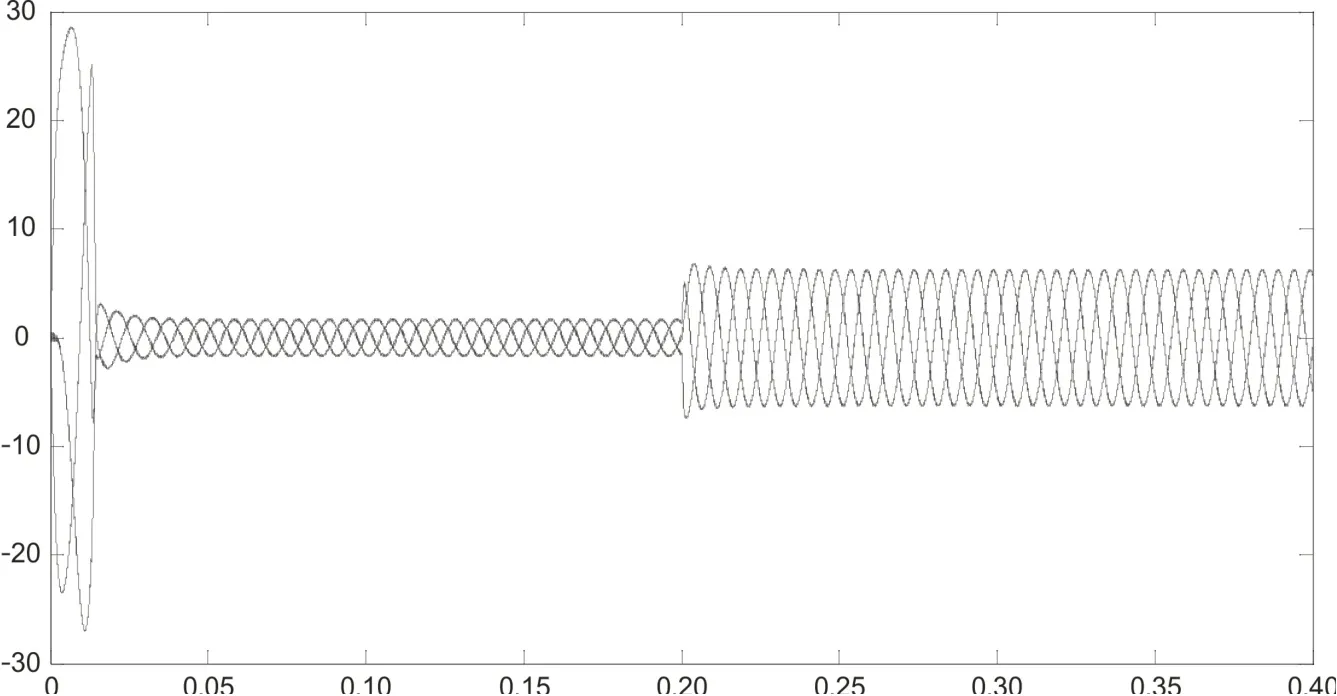
圖6 限幅后三相電流波形
4.2 本文方法和模糊PID方法的仿真對比
本文電機調速控制系統是指在速度外環采用限幅函數和模糊PID及比例因子串聯控制器,電流內環采用模糊PI控制器。傳統電機調速控制系統是指在速度外環和電流內環都采用模糊PID控制器。本文設計的調速控制系統與傳統調速控制系統的仿真對比如圖7所示。
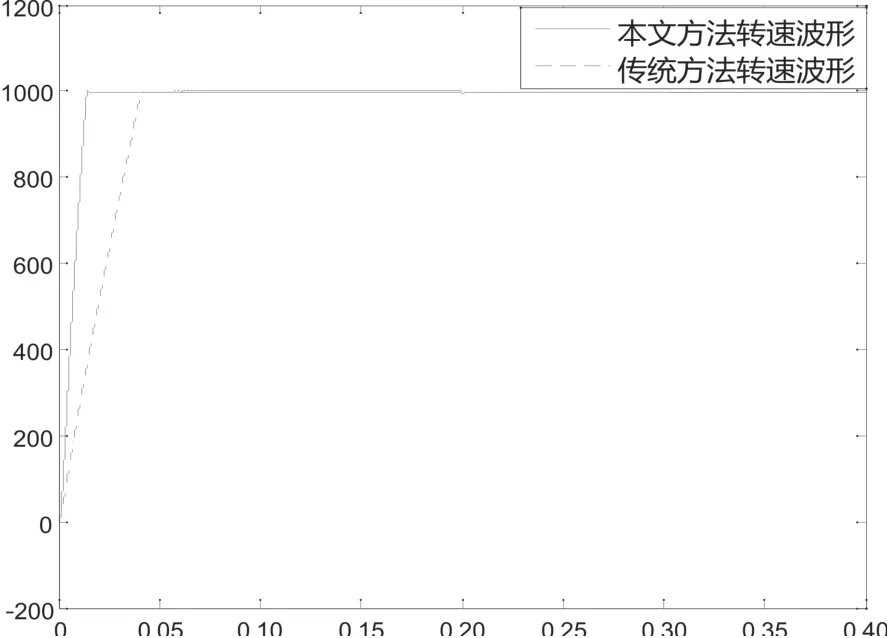
圖7 電機調速控制系統仿真對比
由圖7可知,本文方法的轉速調節時間明顯少于傳統模糊PID方法的轉速調節時間,且兩種算法均不存在超調。在0.2秒突加負載時兩種方法的轉速波形基本不受影響。
5 結論
根據勞斯穩定判據的充要條件分析了系統的穩定性。通過FFT和信號波形分析,限幅函數有效地減少了三相電流波形的總諧波失真程度,并提高了系統的穩定性,減少了噪聲的產生。速度外環和電流內環都采用了模糊控制算法以提高系統的魯棒性和抑制系統的超調。在速度外環的模糊PID控制器后串聯一個比例因子既避免了系統的振蕩又提高了系統的響應速度。仿真實驗表明,本文方法顯著提高了系統的響應速度和降低了電流波形的失真程度。
