三維激光掃描測體積技術及其應用進展
2021-11-05 05:41:24喬俊峰周沅楨農永紅李博宇資文華
激光與紅外 2021年9期
關鍵詞:測量
喬俊峰,周沅楨,王 永,范 興,農永紅,李博宇,資文華
(1.云南師范大學能源與環境科學學院,云南 昆明 650500;2.紅云紅河煙草(集團)有限責任公司紅河卷煙廠,云南 彌勒 652399)
1 引 言
隨著測繪技術的不斷發展,傳統的接觸式測量方式因存在損傷被測物體表面隱患、耗時耗力、依賴人工經驗等缺點,已無法滿足越來越復雜的體積測量場景。近年來,非接觸式測量技術的發展在適應更多復雜測量環境、高效準確獲得被測目標的表面輪廓信息等方面體現出了獨特的優越性,尤其以三維激光掃描測體積技術為代表的非接觸式體積測量方式在采礦、林業、建筑、醫學等領域中的應用已逐漸嶄露頭角。
我國三維激光掃描在測量體積上應用廣泛,邵晴利用基于飛行時間法的三維激光掃描設備設計了糧倉儲量檢測系統,經過對比試驗結果與原始體積,得出最大誤差不超過1 %的結論[1];高如新利用基于雙目立體視覺的三維激光掃描設備測量煤堆的體積[2];陶依貝利用激光三角法測量傳送帶物料體積[3]。盧貞也針對三維激光掃描在林業上的應用進行了大量的研究[4],對于林木測量、森林生物量測定等工作有著重要意義[8]。國外對三維激光測體積的研究主要集中在在醫學和工程測繪方面[5-7]。由于使用場景帶來的各種實際問題,造成行業間技術水平不一,先進技術共享性差,阻礙技術的發展。所以整合各類先進的技術,科學選擇與應用,對工業、建筑業等的發展都有著重要意義。
2 三維激光掃描技術原理
三維激光掃描技術就是通過掃描待測目標輪廓,獲得一系列密集的點坐標(點云數據)來反映物體形狀,該技術的關鍵是被測物體表面輪廓坐標信息獲取和物體表面輪廓重建。基于不同的光學原理,三維激光掃描技術原理及其方法主要有飛行時間法、激光三角法、雙目體視法和全息干涉法[3],其主要適用場景如表1所示。

表1 幾種常見光學原理利用情況舉例Tab.1 Examples of several commonoptical principles are given
2.1 飛行時間法
飛行時間法是使用激光脈沖發射器向待測目標表面發射激光脈沖,經過待測目標表面后會發生漫反射,其中一些反射光會按照原路徑返回到激光發射器,激光掃描設備通過記錄激光發射時的時間和接收時的時間差Δt,再根據光的傳播距離公式:S=C×Δt/2即可計算得到激光掃描設備和物體表面的距離,典型的激光雷達掃描系統就是基于該原理。朱鐵軍基于該原理進行了糧堆體積測量試驗,分析表明應用三維激光測量糧堆的方法具有良好的可行性,并適用于多種不規則糧堆的測量[8]。這種方法的優點是可檢測距離遠、受環境光影響小,但是對時間記錄的精確度要求極高,購置高精度時間計算模塊就會使成本過高。
2.2 激光三角法
激光三角法顧名思義就是利用相似三角形原理,結合激光傳感器來計算得到待測物體表面與參考面之間的距離,再根據提前標定好的設備坐標等來獲得物體表面坐標,廣泛應用于高精度工業檢測領域。陶依貝利用基于激光三角法原理的激光掃描系統測量傳送帶物料體積,并經過現場實驗驗證測量結果的誤差在3 %以內,證明基于該原理測量的可行性、可靠性[3]。該方法與飛行時間法相比成本低,且測量范圍廣、結構簡單、維護方便,是一種高速、高效、高精度、應用前景廣闊的非接觸測量方法,但由于相似三角形測距的原理,隨著測量距離的增大,誤差也會越來越大,這也是激光三角法的局限性,難以改變。
2.3 全息干涉法
全息干涉法主要通過對比兩個光譜信息來獲得物體的坐標信息,分別是發射的激光經過物體表面干涉后的光譜信息與保持不變的參考光譜信息,在利用全息干涉法原理的測量過程中,參考光的全部信息被提前記錄在攝影底片上,參考光發射經過物體表面干涉后返回物光到傳感器中,此時干涉條紋的亮度和形狀完全由物光的振幅和相位所決定,所以可以從中解讀出物體表面的三維坐標信息。全息干涉法精確度極高,非常適合測量精密物體或者結構復雜的物體。但是要想保證精確度,測量距離就很有限,且容易受到環境光的干擾。
2.4 雙目體視法
雙目體視法與前面三種方法不同,是唯一的一種被動式測量方法,通過模仿人的兩只眼睛來獲取兩個視圖信息,通過視差計算對待測物體進行定位。由于檢測環境多變,檢測系統各器件之間的位置關系也會影響到檢測結果,為保證系統穩定性和可靠性,工作前對系統進行標定是很有必要的,目前使用最多的標定方法為張正友標定法[9]。測量設備中需要有兩個高分辨率相機,工作時同一個物體在兩個相機內成像,實現定位的最主要步驟為坐標點的匹配,即為物體表面一點在兩個相機中的位置匹配,通過同一點在兩相機中的位置坐標來計算物體表面點的坐標信息,所以匹配的越精確,獲得的物體表面坐標信息就越準確。毛琳琳利用該原理設計了大堆物料測量平臺,可實現對大堆物料的三維重構和體積計算,并通過實驗驗證該平臺滿足實際應用要求和操作需要[10]。雙目體視法優點是成本較低的同時理論精度高,但也容易受到環境光干擾,在一些環境光強的場景中難以發揮出優勢。
3 三維激光掃描測體積系統及其計算
三維激光掃描測體積系統主要由硬件系統和后處理軟件系統組成。三維激光掃描一般分為數據獲取、數據處理、表面建模三個工作模塊[11],其流程如圖1所示。
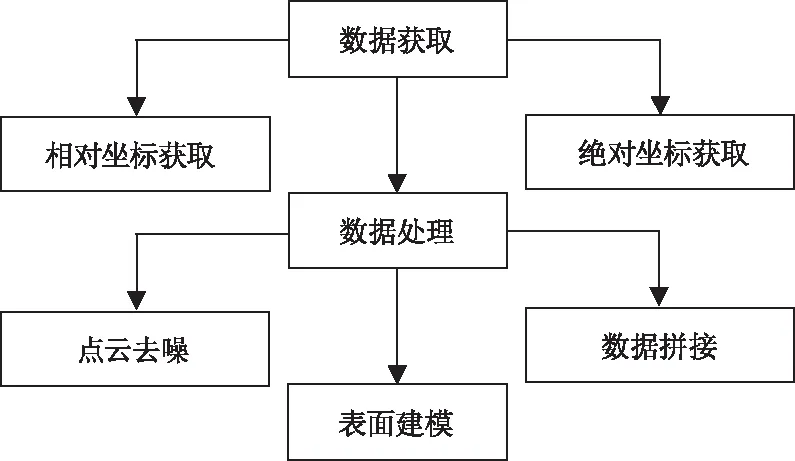
圖1 三維激光掃描測體積流程Fig.1 3D laser scanning volume measurement process
3.1 激光掃描獲取物體輪廓點云數據
利用三維激光掃描設備測量物體體積的首要步驟是獲取物體表面輪廓的坐標信息,采集后的物體表面位置信息是一系列密集的點的集合,因看起來像是一朵不規則的云彩,所以也被稱為點云數據,點云數據的獲取直接關系到后期三維重建的質量[24],雖然各類激光掃描設備原理不盡相同,但是測量目的都是準確的得到物體表面輪廓的點云數據,劉鵬在基于多核DSP的激光點云三維重構技術研究中發現基于飛行時間法的激光雷達掃描得到的輪廓數據具有結構簡單,處理方便等優點[13],再加上精密儀器工藝的發展,激光雷達掃描系統的成本也在逐步降低,所以近幾年得到廣泛的應用。孔德明利用激光雷達測量了列車車廂在或體積,實測數據證實測量精度較高,可直接用于車廂貨物的自動化檢測[14]。
以基于飛行時間法的激光雷達為例,獲取點云數據計算方法如圖2所示。由圖2可知,激光發射器發射脈沖激光經由待測物體表面漫反射后,會有一部分激光按照原路徑返回到光學接收器中,時間記錄模塊可以精確記錄下激光從發射到接收的時間,從而計算出時間差Δt,由S=C×Δt/2即可得出三維激光掃描系統到被測物體表面的距離S。角度記錄模塊可以記錄下激光脈沖發射時與水平面的夾角β,以及在水平方向上與初始標定方向的夾角α,再結合已知的值S,通過勾股定理即可算出被測目標表面點的坐標A。激光發射器發射激光脈沖的頻率可達每秒幾萬個,所以該系統可以在極短的時間內掃描到大量的被測物體表面點云相對坐標信息,由于經常會涉及到多個三維激光掃描系統同時檢測一個待測目標或者一個三維激光掃描系統轉換位置對一個待測目標多方位檢測,所以為保持數據的統一性,需要將相對坐標信息轉換到絕對坐標系下,這時候就需要借助GPS提前確定三維激光掃描系統的絕對位置,進而實現數據轉換。
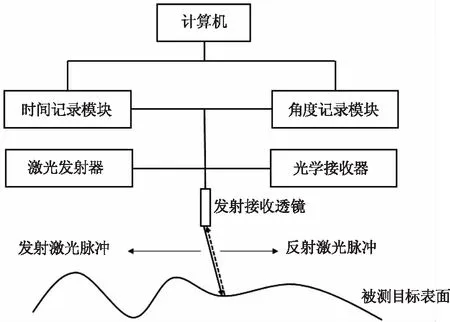
圖2 三維激光掃描系統示意圖Fig.2 Schematic diagram of 3D laser scanning system

圖3 飛行時間法計算原理Fig.3 The calculation principle of TOF
3.2 點云數據預處理
由于實際應用環境復雜多變,獲取的點云數據往往都是散亂無章的,比如測量建筑工程工程土方量時施工現場的施工設備,點云數據的密集程度等等都會給體積計算帶來影響[15]。所以獲取物體輪廓點云數據后,需要對其進行預處理才能開展體積計算工作,預處理的主要步驟有點云去噪、數據拼接、表面重建等,其方法及作用如表2所示。

表2 主要的點云預處理過程Tab.2 The main process of point cloud pretreatment
由于被測對象表面因素、掃描系統本身及外界環境條件引起的測量誤差產生的噪聲離群點是不可避免的,噪聲離群點對后期局部區域點云特征估計影響很大,其移除勢在必行。王洪蜀在測量樹冠體積的實驗中,經過對每個點的鄰域進行統計分析,并移除那些不符合一定統計標準的點,使處理后的點云數據輪廓更接近與真實情況。因有一些測量場景中,被測目標體積龐大,單一的掃描難以對物體進行完整的掃描,這時候就需要多個激光設備同時測量或者同一個激光設備轉換位置多次測量,測量后要將獲取的各個點云集合拼接起來才能得到完整的物體輪廓點云數據,常用的拼接方法有:特殊點法、坐標拼接和手動拼接。王瑞在對采空區體積測量研究中,利用C-ALS三維激光探測儀器探頭對體積較大的采空區兩端進行兩次掃描,通過特殊點法和坐標拼接法將對采空區兩次測量的點云數據進行拼接形成完整的輪廓表面[16]。
3.3 三維重建和體積的計算
雖然點云數據密集程度極高,但終究是一系列點的集合,要想實現體積計算,就必須對這些密集的點進行三維重建,得到真正的物體輪廓三維圖形,現在廣泛采用的三維重建方法為三角網格法。
三維重建后的物體是一個不規則體,無法用規則體的計算公式來得出體積,必須用到高等數學積分計算,還需要選擇更加科學的方法。不規則體分割計算體積的方法有很多,已經進行大量研究的有切片法、切段法、三棱柱分割法、長方體分割法和體元計算法等等。李斌利用切片法計算不規則點云段塊體積,實驗結果表明,基于切片法的三維激光測體積系統計算方法正確、簡潔、高效、可控,可以解決不規則體的體積計算問題[17]。以一塊不規則石頭的點云數據為例,計算時,首先標定不規則物體方向,然后沿著垂直方向平行切割成n個寬度極小且相同的片狀,寬度為h(如圖4所示),即可得到一系列對應的片狀的邊緣輪廓坐標(如圖5所示),提取每一個片狀體所對應的邊緣點云數據,則可以將面積Si計算出來,進而求得體積,如式(1)所示:
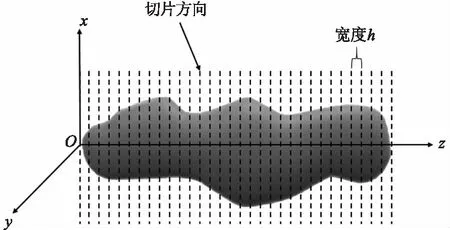
圖4 點云數據切割示意圖Fig.4 Schematic diagram of point cloud data cutting
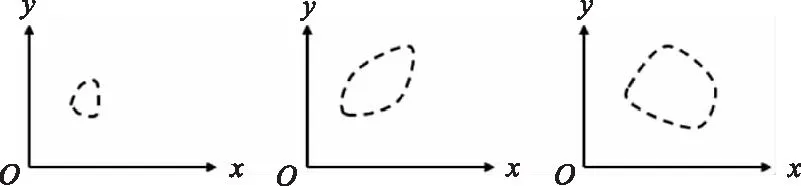
圖5 切片法獲取的片狀輪廓示意圖Fig.5 Schematic diagram of sheet contour obtained by slicing method
(1)
4 三維激光掃描在體積測量上的應用
4.1 三維激光掃描測體積技術在采礦業中的應用
礦山采空區具有三維空間復雜、分布不均勻、危險系數大等特點,傳統的采空區體積測量方法主要依賴人工,同時必須進入采空區使用全站儀在水平方向上檢測采空區邊緣坐標,之后通過所有測得的水平面輪廓連線的方式構建出采空區輪廓,這種方式所得的結果往往誤差較大、人工成本高,對于指導生產的參考價值有限。
采用三維激光掃描技術對采空區進行空間測量、模型重建、體積估算,可以實時掌握采空區的空間結構,以便修整開采方案,降低塌陷風險,對礦產生產安全有著重要意義。近年來,激光掃描測體積技術迅猛發展,大量學者對三維激光掃描技術在礦山采空區測量中的應用進行研究(如表3所示)[16,18-20]。
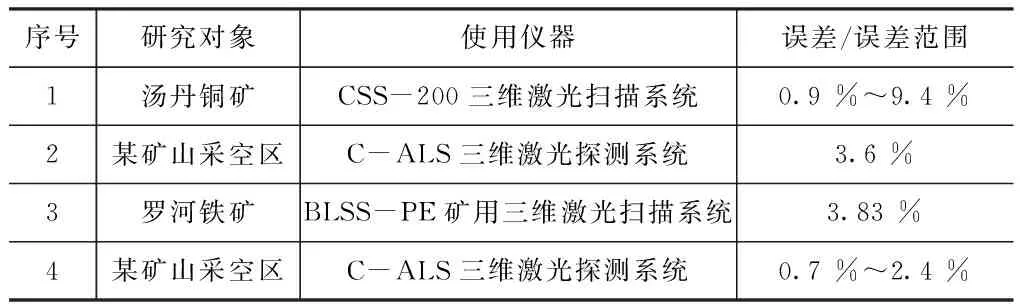
表3 采空區體積測量研究實例Tab.3 Some research examples of goafvolume measurement
采用三維激光掃描技術對采空區進行空間測量相比于傳統計算方式更加快速和精確,王瑞使用C-ALS三維激光掃描系統對某礦山采空區測量中實現采空區超挖量、欠挖量的高效計算,對礦山采空區后期充填量預算具有重要參考價值。已經投入商用的礦山三維激光掃描系統有很多,大都基于飛行時間法,也就是激光測距的光學原理設計,其中比較優秀并且應用廣泛的有C-ALS三維激光掃描系統、CMS空區激光探測系統,C-ALS是世界上唯一一款在50 mm鉆孔中就可以深入地下進行空區探測的三維激光掃描儀(詳細參數如表4所示),探頭直徑僅為50 mm,使用非常方便。
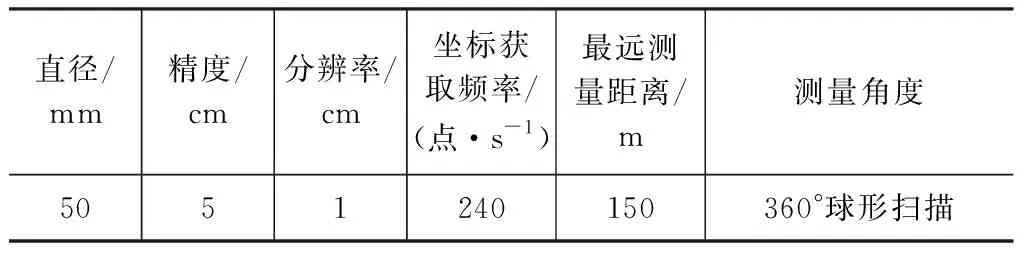
表4 C-ALS主要技術參數Tab.4 Main technical parameters of C-ALS
使用C-ALS三維激光掃描系統對礦山采空區測量時,需要提前打好直徑為50 mm以上的鉆孔,之后測量人員只需要站在地面上將激光探頭通過伸縮桿送進采空區內部,即可開展測量工作(如圖6所示)。有時遇到非常結構復雜的采空區,會出現單次測量存在盲區的問題,可以通過多鉆孔多次轉換位置測量,最后進行數據拼接的方式解決。三維激光掃描系統測量采空區體積的方式非常安全高效,最大程度保護了采空區周邊結構,且測量準確率高,是目前采空區測量工作最為理想的方案。
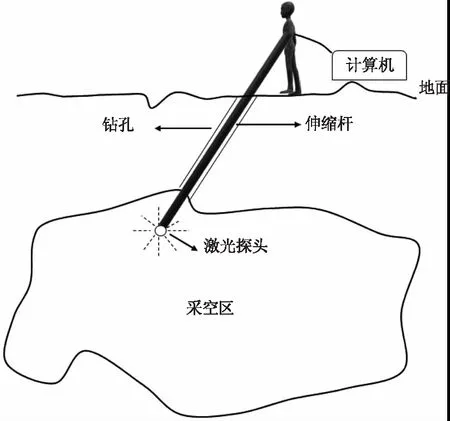
圖6 三維激光掃描系統測量采空區Fig.6 3D laser scanning system measures goaf
4.2 三維激光掃描測體積技術在林業中的應用
在森林資源調查中,需要測量全部的樹冠體積來確定森林的光合作用能力,以便對森林資源進行動態監控,實現森林資源可持續發展。但是由于樹林地形復雜,樹木分布不規則等特點,使人工測量工作量極大。
激光掃描技術在林業調查的應用也經歷了漫長的發展過程,基地式激光雷達最先得到廣泛應用,但是單個基地時激光雷達設備只能采集視野范圍內的林木信息,譚遠模利用提前在森林中設置目標球的方式實現多個掃描站采集數據最后可統一到同一坐標系下,實驗結果表明將三維激光掃描技術引入到林業測量工作中可大大提高工作效率[21]。隨后可移動的背包式激光雷達和機載激光雷達(ALS)被發明出來,Hyypp?等利用背包式激光雷達進行了森林資源調查工作,實驗證明準確性良好的同時相較于傳統方法耗時極短[22]。這兩種可移動式激光雷達使林業測量工作不再需要或很少需要固定在地面上進行,避免了由于森林地形復雜給測量工作帶來的麻煩。
近些年興起的無人機載激光雷達(UAVLS),憑借著它操作簡單,所需人力和檢測環境要求極低的優勢,在此類工作中逐漸嶄露頭角,Brede等就利用無人機載激光雷達測量地面生物量[23]。全迎比較了ALS和UAVLS對于單個樹冠體積的測量結果,實驗證明了UAVLS相比于ALS有著更高的探測精度和結構參數提取精度。郭慶華在梧桐會直播報告中比較了地基激光雷達、機載激光雷達、無人機載激光雷達以及應用極少的星載激光雷達的檢測精度、工作難度、人工成本等方面,最后表明近地面的無人機載雷達最適用于森林資源的檢測,在大尺度森林遙感監測中有著很好的應用前景。
4.3 三維激光掃描測體積技術在建筑業的應用
在建筑項目中,土方量的的計算關系到整個項目的工程預算、施工進度規劃、場地空間規劃以及工程監理工作。高梓成利用RIEGL VZ-1000型三維激光掃描儀對建筑垃圾土方量進行掃描,通過建模后的三維模型來計算土方量,實現了建筑垃圾土方量的高效計算,并具有無接觸、高精度等優點,為建筑項目管理規劃工作帶來極大的便利[25]。Hu等也將三維激光測體積技術應用到建筑項目中的開挖體積計算上,結果表明該技術比傳統人工測量可減70 %~90 %的時間,可以快速、準確地獲得開挖體積信息[26]。
在數字化城市建設中,建筑物是極其重要的一環,一些古建筑物由于歷史悠久,結構與現代建筑天差地別,如何獲取古建筑物輪廓信息,對文化古跡實現數字化保護具有重要意義。閆澤文將三維激光掃描技術同BIM技術結合起來,使用Focus S350掃描儀對古建筑物實地測量,獲取點云數據后經過預處理,再運用3ds Max對古建筑物進行三維重建,根據三維模型即可對古建筑物進行幾何質量的評價[27],這有助于文化遺產的保護修復工作,也對數字化城市建設中的難點具有重要參考價值。
4.4 三維激光掃描測體積技術在醫學領域的應用
三維激光技術廣泛應用于醫學中的各個子領域,Ramírez等利用三維激光的定位和三維重建功能對骨肉瘤切割手術中的切割導向器實現可視化管理,對導向切割器的體積、形狀、切割動作等進行精準把控,最大限度地減少因手術操作而可能引起的并發癥[5]。Jani等對人體遺失骨骼進行補缺研究,三維重建后的骨骼模型可以準確量化遺失部位的空間體積,進而根據解剖特征和數字分析對遺失部位進行補缺,對法醫的骨骼還原工作有極其重要的意義[6]。在醫學的子領域中,三維激光技術應用最多且最為成熟的領域是牙科,Javaid等將三維激光掃描所獲得的物理模型轉換成數字CAD文件,便于定制零件的形狀、體積,研究表明該方法有助于降低復雜性和生產周期,牙醫可以利用這項技術來設計定制牙齒、牙冠、牙套、假牙等等[7]。目前來看,三維激光掃描技術在醫學領域依然極具發展潛力。
4.5 三維激光掃描測體積技術在工業上的應用
工業生產在國家經濟發展中扮演著重要角色,為支撐工業生產的生產力發展需求,三維激光掃描技術被引進工業生產領域中,Mhaske等將三維激光掃描結合顯微技術應用到食品加工生產上,在不影響食品質量的前提下提高食品附加值[28]。陶依貝為了解決工廠傳送帶物料體積測量實時性差、準確度低的問題,開發了一套基于三維激光掃描的體積在線測量系統,該系統極大的提高了傳送帶物料體積測量的效率,免除人工成本,加快工業生產自動化進程[3]。還有類似糧倉、煤庫等體積檢測場景,三維激光技術都可以發揮出它的實時高效的優勢,為工業生產帶來極大的便利。
4.6 三維激光掃描測體積技術在農業中的應用
在大豆的壟上種植模式下,有著莊稼地面平整度差異大、植葉交錯難以區分的難題,管賢平提出一種基于LiDAR的三維激光掃描系統,對單個大豆植株進行表面重建,最終實現大豆植株的快速分類和體積統計。Turunen等利用三維激光掃描技術進行地面三位水文模型重建,并在計算機中模擬土壤水力特性的長期變化會對表層徑流產生很大影響,可以計算得出土壤耕作后會影響徑流,使徑流增加25 %[29]。直接量化之前只能憑經驗才能得出的結論,對土壤水土平衡控制有著重要參考價值。
4.7 三維激光掃描測體積技術物流快遞中的應用
隨著網上購物的發展,快遞包裹流量越來越大,如何準確地按體積分包,成為現在的熱門研究方向,王占杰等發明了一種基于三維激光掃描技術的包裹體積測量技術,可以實現物流快遞的大小區分,從而分體積裝車,避免物流業“大塞車”現象,提高物流效率[30]。
5 展 望
由于計算機技術的發展,各種模型重建算法層出不窮,近些年已有學者開始研究基于深度學習的三維重建方法,精確度進一步提高,因此在三維激光測體積技術中,如何高效準確地獲取點云數據,采集后如何進行科學的數據處理,使點云數據更接近于實際物體輪廓是現在主要的研究方向。在當前的點云數據采集工作中,最初只應用于軍事領域的激光雷達技術有著成本越來越低,精確度極高的優勢,未來將可能更多地出現在工業生產領域。總的來說國內在三維激光掃描測體積的應用方面非常強,但是缺少高精度設備的研發,缺乏核心技術,高端設備往往依賴于進口,這也是制約三維激光掃描技術在國內發展的重要原因。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00