多技術融合的綜合交通樞紐智能停車系統
2021-11-06 08:21:00周敏
鐵路計算機應用 2021年9期
周 敏
(中國鐵路設計集團有限公司 電化電信工程設計研究院,天津 300308)
近年來,各地大規模建設涵蓋多種交通形式的綜合交通樞紐,顯著提升了旅客出行、換乘的便捷性。但由于交通樞紐客流密集,小汽車接駁數量逐年增長,停車困難問題日益突出[1]。
因停車場內部空間復雜,很多車位存在長期空置的問題,未得到充分利用,而車主進入停車場后,往往會被立柱與車輛阻礙視線,無法提前發現空余車位,導致其耗費較長時間在場內盲目尋找,造成停車場內的交通擁堵。車主在返回停車場取車時,由于場內空間大、標志物和空間環境相似,無法及時找到停車位置,為此耗費大量時間在停車場內尋車,降低出行體驗[2]。
本文采用車輛識別、三維全景建模、軌跡跟蹤、人像識別等技術,提出了綜合交通樞紐智能停車系統,有效提升停車場管理效率,降低運營成本,為車主提供便捷、智能的停車體驗。
1 核心技術
為方便旅客停車、尋車,需對交通樞紐的停車場進行三維全景建模,判定停車場中的車位狀態及各車輛的位置情況;再對用戶車輛進行識別,獲取車輛類型、車牌號碼等信息來判定用戶查找的車輛位置;通過人性化的導航方式,引導旅客找到空閑的停車位或所查詢的車輛。
1.1 車輛識別與車位關聯
車輛識別與車位關聯的流程,如圖1 所示。
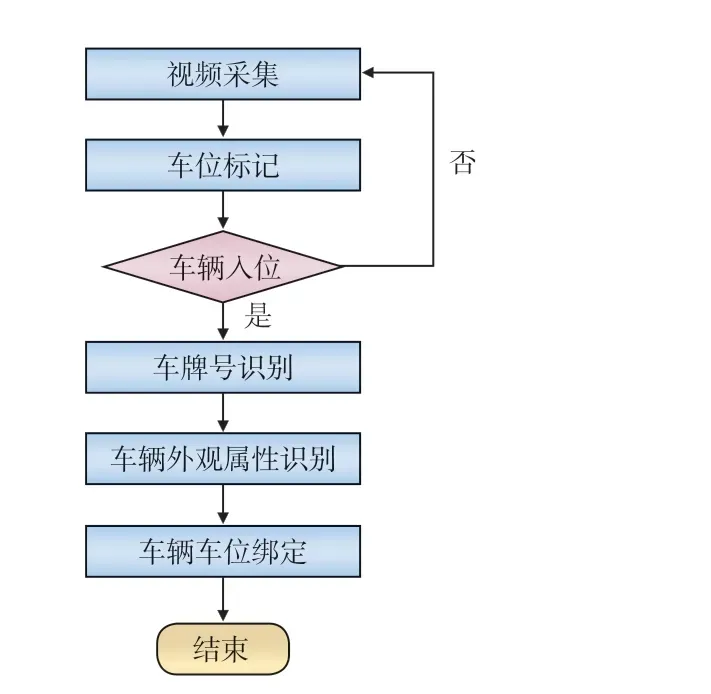
圖1 車輛識別與車位關聯流程
在綜合交通樞紐停車場采集的視頻中標記出停車場的區域位置及停車位編號。當車輛進入停車場后,視頻采集到含有車輛的畫面時,通過車輛入位算法,分析其是否在停車位中。如果車輛在車位中,系統對畫面中車輛的車牌號和外觀進行識別,并綁定車牌號與車位編號,從而完成車輛與車位的關聯。
1.1.1 車輛入位檢測算法
本文設計一套車輛入位檢測算法流程,如圖2所示。
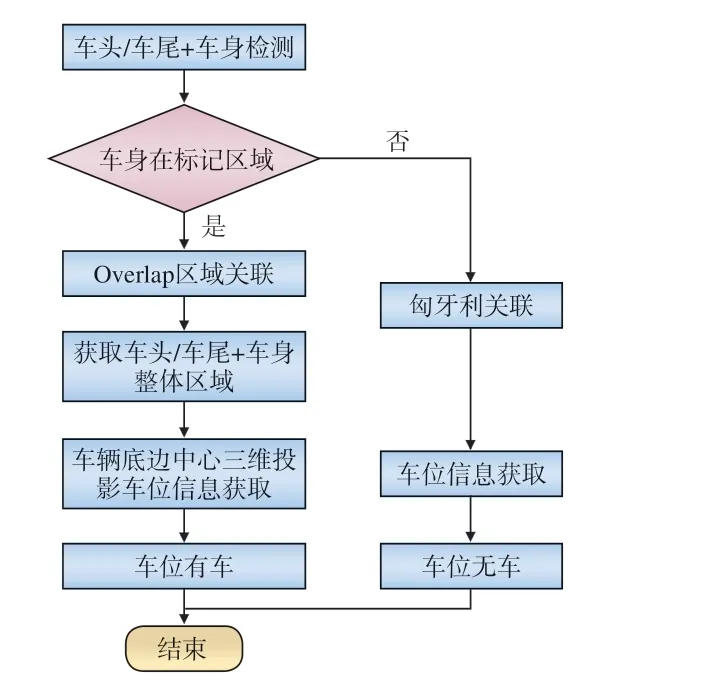
圖2 車輛入位檢測算法流程
該算法核心在于檢測車輛是否進入車位,本文采用Retinanet[3]作為基礎檢測框架,利用backbone[3]和anchor[4]對數據進行增強、優化、匹配。檢測任務采用CIoU[3]作為損失函數,公式如下:
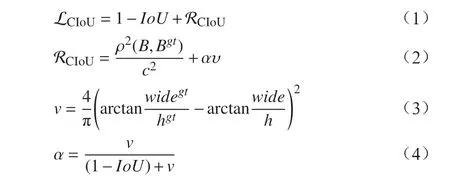
其中,IoU是交并比,指產生的候選框與原標記框的交疊率,即它們的交集與并集的比值;RCIoU為CIoU 損失函數的懲罰項;LCIoU為CIOU 損失值[3];α為正向的權衡參數;ρ2為歐式距離;v為測量橫縱比的一致性;c為圖中兩車輛檢測框的對角線長度;B為檢測的目標邊界框大小;wide為目標邊界框寬度,h為目標邊界框高度;gt為真實標注的目標邊界框。
為了克服無法精確定位的問題,本文利用檢測器分別檢測車身、車頭、車尾3 部分,對非標記區域的車輛采用匈牙利算法進行車位信息關聯,對標記區域的車輛,利用overlap 區域關聯方式進行車位匹配,并以車頭、車位、車尾的優先級進行關聯,將檢測到的目標投影到三維圖中進行車輛定位。
1.1.2 車牌號識別
本文采用光學字符識別(OCR,Optical Character Recognition)方法對車牌號碼進行識別[5]。為快速準確地識別車牌號,采用DenseNet[6]網絡結構,使該模塊可在攝像頭等邊緣設備上流暢運行。為避免傳統車牌識別中的字符分割、字符識別等繁瑣的識別流程,本文采用CTC-Loss[6],可端到端地進行車牌號識別訓練和測試。
1.1.3 車輛外觀屬性識別
車輛外觀屬性識別是針對車輛類型、品牌、顏色等屬性的識別。本文采用Resnet 作為圖像特征提取 模 塊,用Circle-Loss 和Softmax-Cross-Entropy-Loss 作為模型訓練時的損失函數。
Circle-Loss 可使不同類型、品牌的車輛特征差距增大,同一類型、品牌的車輛特征差距縮小,從而較好地區分車輛的外觀屬性,提升準確率,公式如下:

其中,γ為尺度因子;K為正樣本個數,即車輛圖像品牌類型一致的樣本個數;L為負樣本個數,即圖像品牌不一致的樣本個數;為第i個同類樣本對的相似性得分;為第j個不同類樣本對的相似性得分;為第j個負樣本對的系數;為第i個正樣本對的系數。
Softmax-Cross-Entropy-Loss 對車輛顏色分類,使不同顏色車輛的特征差距更大[7],從而區分車輛的不同顏色,公式如下:
其中,w為權重矩陣;N表示總的樣本個數;yi為第i個樣本的類別標簽;b為偏置;xi為第i個樣本的特征。
1.2 三維全景建模
本文基于數字孿生的三維場景建模技術,利用激光雷達、慣導、輪速計、AI 相機等設備對停車場進行三維場景重建。采用多傳感器融合、圖像優化等技術進行定位、數據矯正,自動獲取激光雷達在運動過程中的位置,通過激光slam 算法,根據位置[8],對運動中采集的多個局部激光掃描點云信息進行匹配處理,實現對停車場大空間場景的自動化拼接、自動建模,形成厘米級精度的停車場三維模型。
通過三維空間模型的三維坐標信息與對停車場大規模物理空間場景的連續圖片進行紋理自動拼接融合后,形成720°停車場全場實景信息,如圖3 所示。
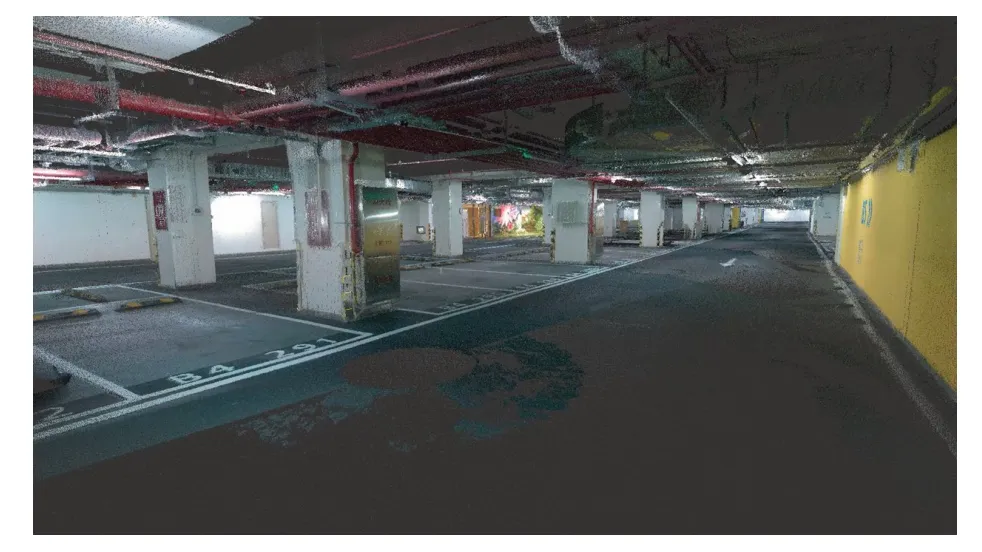
圖3 停車場厘米級三維模型
1.3 移動端室內導航
移動端基于iBeacon,通過三角定位得到用戶的位置,并結合步行者航位推算(PDR,Pedestrian Dead Reckoning)定位,使位置信息更加精準[9]。單一的iBeacon 定位噪聲波動大,單一的PDR 定位易產生累積誤差,兩者融合起來,相互之間優勢互補,當出現部分環境信號缺失或部分傳感器不兼容時能夠相互補充,使得定位精度更高,定位穩定性更強。
2 系統設計
2.1 系統架構
綜合交通樞紐智能停車系統架構如圖4 所示,包括基礎層、資源層、算法層、業務層。其中,基礎層包括AI 相機、交換機、服務器等,實現對車輛信息的采集、處理、存儲及查詢;資源層包括車輛數據、三維實景地圖等;算法層包括車輛識別、三維全景建模、室內導航;業務層包括停車場管理模塊、移動端小程序。
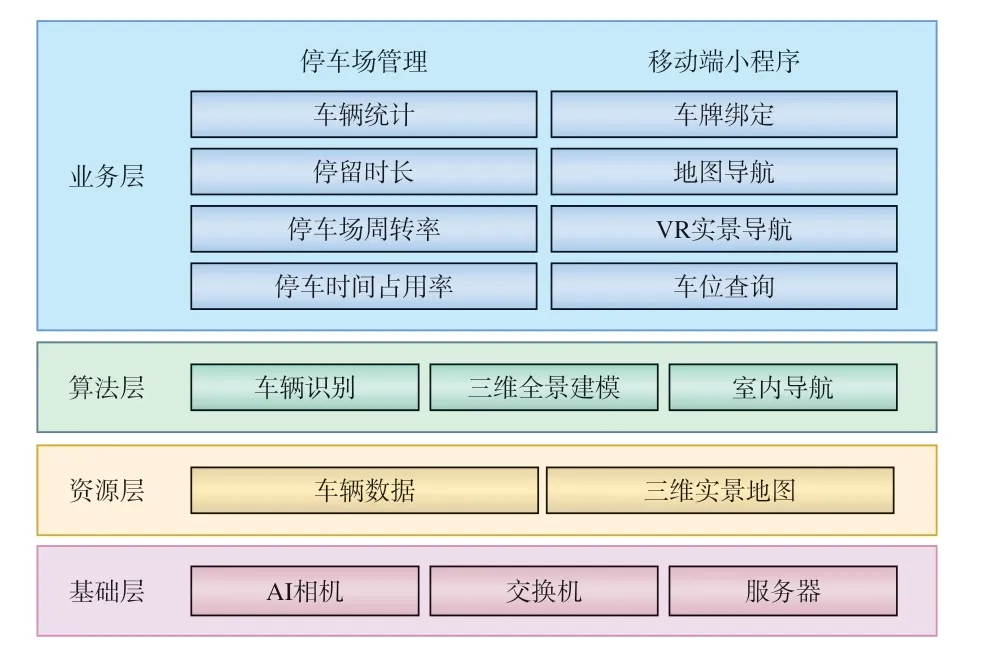
圖4 綜合交通樞紐智能停車系統架構
2.2 網絡架構
綜合交通樞紐智能停車系統主要由視頻分析服務器、三維地圖服務器、小程序服務器組成。三維地圖服務器負責停車場三維實景信息的管理與發布;視頻分析服務器負責對AI 相機采集到的車輛視頻進行分析,生產車輛結構化數據;小程序服務器負責移動端的服務收發及定位導航功能,綜合交通樞紐智能停車系統網絡架構,如圖5 所示。
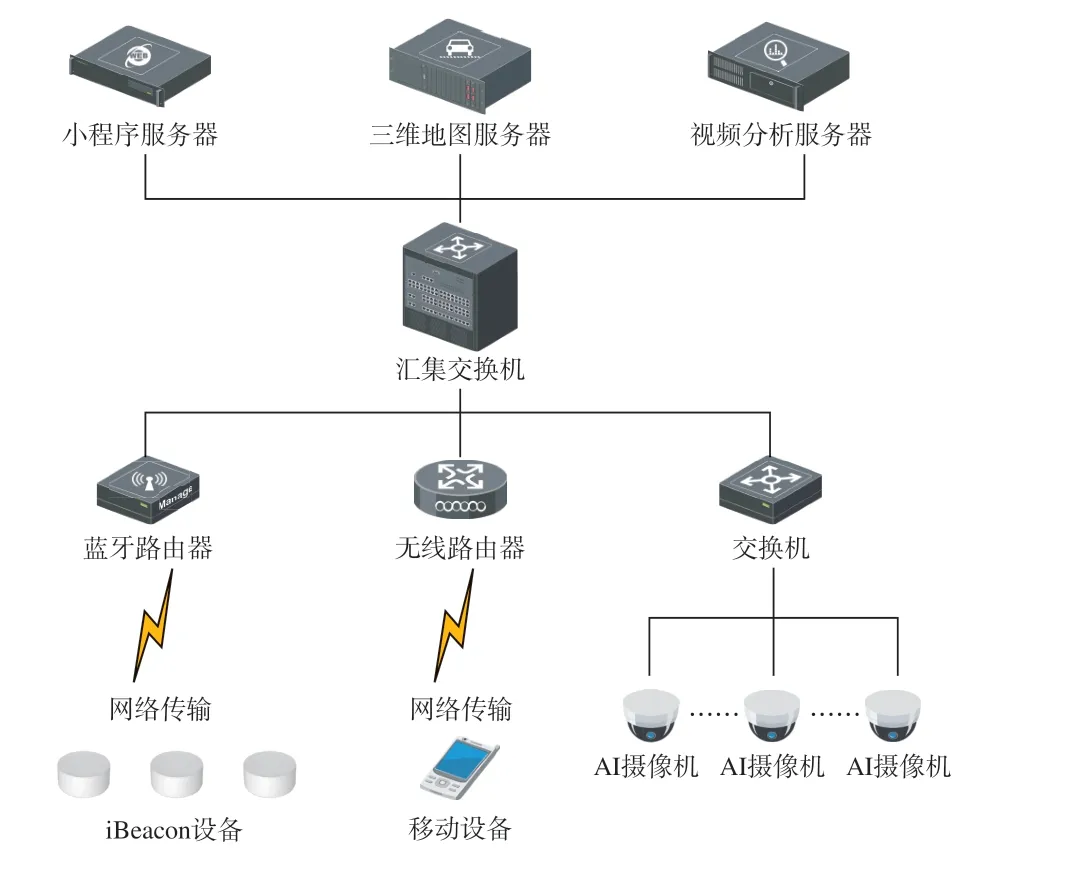
圖5 綜合交通樞紐智能停車系統網絡架構
2.3 系統功能
2.3.1 停車場管理模塊
停車場管理模塊可對停車場累計進出場車輛、平均出場時間、停車場占用比例、平均周轉率等進行分析;對通道逆行車輛、違停車輛、車輛擁堵等事件進行精準識別、抓拍、記錄、統計,包括發生時間、車牌號、抓拍照片、車道號等,界面如圖6 所示。

圖6 停車場管理模塊界面
2.3.2 移動端App
移動端App 通過手機、平板等移動設備獲知用戶精準定位,為用戶提供剩余車位正向引導及尋找車輛車位的導航功能,界面如圖7 所示。
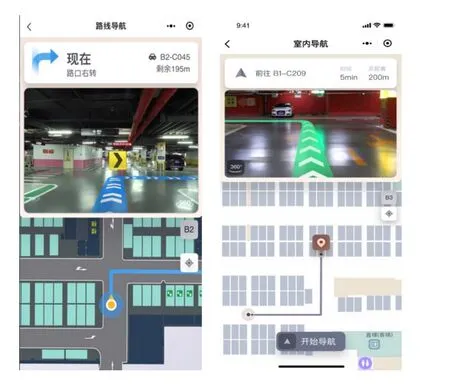
圖7 移動端App 正向引導及反向尋車界面
系統基于移動設備獲取iBeacon、Wi-Fi 等物理場信號及用戶行走距離、方向等信息,通過多傳感器融合濾波算法,實現各傳感器數據的優勢互補,最終實現對用戶的高精度定位[10]。移動端App 通過獲取空余車位信息,并基于用戶的定位信息,為用戶提供剩余車位的實景導航、地圖導航功能。其反向尋車功能可為用戶提供尋車的實景導航、地圖導航。
3 結束語
本文梳理了綜合交通樞紐停車場的各項問題與難點,針對車位引導難、反向尋車難等問題提出了綜合交通樞紐智能停車系統,通過綜合運用車輛識別、三維全景建模、移動端室內導航等技術,實現空余車位實時引導、智能尋車等功能,提高了停車場的車輛周轉率和管理水平,盤活現有停車資源,降低運營成本,同時優化了用戶停車體驗。該系統仍需不斷完善,實現停車場人車大數據分析及與其他業務系統的協同是今后研究的重點。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54