模塊化多用途無人智能車平臺的設計與實現
2021-11-08 13:55:53王耀福宗巖賀寧寧
電腦知識與技術 2021年27期
關鍵詞:模塊化
王耀福 宗巖 賀寧寧


摘要:為解決無人駕駛汽車在商業應用中成本居高不下、難以量產、安全問題突出等一系列問題。本文將針對封閉或半封閉場景下的低速無人功能車進行再設計、再優化,從而降低無人車在開發、測試、運營、維護方面的成本,驗證自身自動駕駛系統及核心控制技術,持續優化融合控制算法,不斷迭代自動駕駛系統;完善無人駕駛車輛的安全保障體系,加快推進中國在無人駕駛領域的商業化量產應用。
關鍵詞:無人車;模塊化;多用途
中圖分類號:TP3? ? ? ? ? ?文獻標識碼:A
文章編號:1009-3044(2021)27-0105-02
自動駕駛汽車又稱無人駕駛汽車、電腦駕駛汽車等,是一種通過電腦系統實現無人駕駛的智能汽車。根據發改委等部門發布的《智能汽車創新發展戰略》,到2025年,中國將實現有條件自動駕駛的智能汽車達到規模化生產,實現高度自動駕駛的智能汽車在特定環境下市場化應用。自動駕駛技術的研發和落地,不僅將帶來汽車行業及相關產業鏈體系的重塑,也會給人們創造更加安全和舒適的出行方式,減少駕駛壓力,提高安全性,避免擁堵并降低污染[1]。因目前法律法規對自動駕駛無人車在開放道路行駛的制度還不完善,所以無人車將率先在封閉或半封閉的環境下得到應用。
目前我國自動駕駛技術逐漸成熟,利用多種車載傳感器(如激光雷達、毫米波雷達、超聲波傳感器、GPS、攝像頭等)感知車輛周圍環境,通過控制系統對車輛實時路況進行動態路徑規劃,實現車輛自動、安全、可靠的行駛。因自動駕駛車輛上需要安裝多種傳感器且單價相對較高,導致無人車單個車輛成本居高不下,且后期保養維修費用昂貴,這也成為限制自動駕駛無人車商業化量產的主要原因,所以怎樣可以降低自動駕駛無人車輛研發和保養維修成本,提高無人車安全性成為繼續解決的問題[4-5]。
1 設計思路
無人車整體采用模塊化設計,可自由更換功能模塊,不同的功能模塊可形成不同的無人駕駛智能車,擴大了無人智能車應用場景,大幅增加了產品的使用率。通過“共本體,多附體”的設計原則,實現主體車身公用,最大化地利用傳感器配套設備,方便自動駕駛系統測試和傳感器調試;整車零部件選用模塊化安裝固定,單個模塊出現問題可直接拆除更換,不影響其他模塊運行,很大程度上節省開發成本和后期運營維護成本。車頭和車尾都設置有防碰撞模塊,車輛發生碰撞時車輛會立刻觸發急停措施,防護車輛自身車殼和傳感器設備,同時也保護道路中的車輛、行人和基礎設施安全。
2 系統結構
模塊化多用途智能無人車平臺由主體車身和功能區組成,主體車身包括上裝模塊和底盤模塊,上裝模塊由上裝外殼、上裝自動駕駛傳感器組、顯示模塊、預警模塊、交互模塊組成;底盤模塊由底盤外殼、底盤自動駕駛傳感器組、防護模塊、底盤車架、控制模塊、電池模塊、車輪模塊組成。功能區由快遞柜模塊、售賣機模塊、配送柜模塊組成。
2.1主體車身
上裝模塊由上裝外殼、上裝自動駕駛傳感器組、顯示模塊、預警模塊、交互模塊組成。上裝自動駕駛傳感器組包括GPS組合慣導和雙目攝像頭,GPS組合慣導安裝在車頂中軸線上,固定在上裝外殼骨架上;雙目攝像頭安裝在車頭上部,通過角度旋轉支架固定在上裝外殼骨架上。顯示模塊由前后LED屏和LED控制器組成,分別固定在上裝外殼骨架上;交互模塊由觸摸屏和語音模塊組成,觸摸屏在車輛右側中間上部,并固定在上裝外殼骨架上;語音模塊安裝在觸摸屏下方位置,語音模塊包括語音控制板和語音喇叭。預警模塊由360°環視攝像頭和預警燈組成,360°環視攝像頭通過安裝支架固定在車頂中間位置,預警燈安裝在360°環視攝像頭固定支架下方與車頂外殼固定連接;上裝外殼同顯示模塊、交互模塊、預警模塊的固定連接都可拆解,可對各個模塊單獨拆解更換。
底盤模塊分別有底盤外殼、燈組模塊、底盤自動駕駛傳感器組、底盤車架、骨架模塊、控制模塊、電池模塊、車輪模塊、防護模塊。控制模塊包括控制模塊盒、控制盒導軌、中央控制器、整車控制器、DCDC、電機控制器、開關控制盒、穩壓器、逆變器、升壓器、繼電器組成。整車控制器分別和中央控制器、DCDC、開關控制盒、穩壓器、逆變器、升壓器、繼電器電性連接,電機控制器和逆變器電性連接;電池模塊包括電池組、BMS系統和電池導軌,電池組固定在電池導軌上,電池導軌安裝在底盤車架上,電池組和BMS系統電性連接,BMS系統和整車控制器電性連接。燈組模塊包括前向大燈、左右轉向燈、剎車燈,行車燈,燈組模塊分別和穩壓器電性連接。底盤自動駕駛傳感器組包括12通道超聲波、前視毫米波雷達和后對角毫米波雷達。
2.2功能區
功能區為主體車身的預留功能區,包括:快遞柜模塊、售賣機模塊、配送柜模塊,并都可安裝到功能區中,并和主體車身卡扣式固定;快遞柜模塊由快遞柜體和快遞柜體控制器組成;售賣機模塊由售賣機體、售賣機體控制器、壓縮機、取貨箱組成;配送柜模塊由配送柜體和配送柜控制器組成。車輛可通過手機App進行預約,預約車輛在特定時間段到達指定地點;并可同無人車相應功能區進行智能交互,比如快遞柜模塊中可通過掃描二維碼或輸入寄/取件碼打開快遞柜;售賣機模塊中可通過招手動作實現車輛停止,語音選擇特定商品進行移動支付(二維碼或支付寶人臉識別支付);配送柜模塊中可進行語音交互和身份識別。
3 系統實現
3.1自動駕駛系統
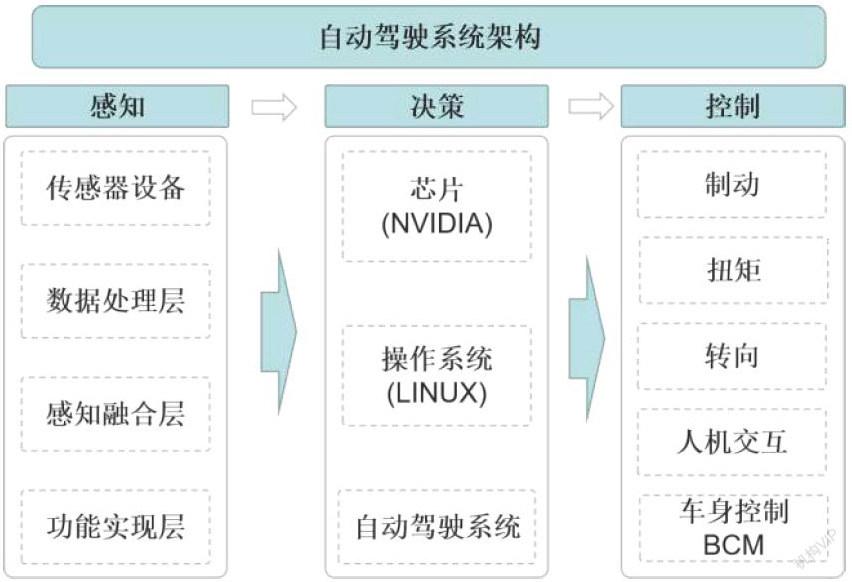
自動駕駛系統是實現車輛無人駕駛的基礎,基于linux系統研發具備完全自主知識產權的自動駕駛系統,本平臺即搭載此系統開展一系列的算法研究及驗證工作。
3.2核心控制技術
多傳感器信息融合感知算法:主要解決障礙物檢測準確度低、誤識別、誤檢測率過高問題。本平臺運用多傳感器的時間同步與聯合標定算法,多傳感器數據融合算法,多傳感器融合目標追蹤與預測算法。實現車輛環境感知系統功能,穩定識別跟蹤目標物,并輸出目標物的相關物理信息,主要包括識別、分類、關聯以及軌跡估計等過程。通過融合感知消除不同傳感器數據之間的冗余,通過數據互補,增強系統的魯棒性,提高無人車輛環境感知系統數據的可靠性,從而降低整車控制器決策風險[2-3]。
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動力(2019年5期)2019-11-07 05:20:16
系統管理學報(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
石油化工建設(2015年2期)2015-12-01 04:16:44
中國教育技術裝備(2015年10期)2015-03-01 02:41:05
