CRH5型動車組速度校準優化研究
2021-11-09 04:30:56王韶力
鐵道車輛 2021年5期
王 凱,王韶力
(中車青島四方車輛研究所有限公司 電子事業部,山東 青島 266031)
CRH5型動車組在實際運用過程中,恒速模式下會出現速度偏差較大問題,通過對速度校準原理及大量數據進行分析,確認原速度校準方案在特殊工況下會造成速度校準失敗,最終導致恒速模式異常。
為有效減少該問題對正常運營秩序的影響,本文提出了一種手動輸入輪徑值進行速度校準的優化方案,通過修改速度計算邏輯、升級顯示屏軟件,可有效減少由于原速度校準機制缺陷造成的動車組速度校準失效。
1 速度校準原理
CRH5型動車組為8輛車編組,每半列車為一個牽引單元。動車組TCMS(列車網絡控制系統)獲取的列車速度共有3個速度源:BCU(制動控制單元)、TCU(牽引控制單元)和PMU(旅客信息控制單元),分別通過MVB總線和CAN總線獲取。以8車所在半列為例,BCU速度取自6車拖軸速度傳感器,TCU速度取自7車和8車電動機速度傳感器[1]。
由于BCU/TCU速度均采用半磨耗輪徑值計算,而動車組實際運用中由于新換輪對、檢修旋輪及自然磨耗等原因,輪徑值可能并非半磨耗值,導致反饋速度不準確,因此需要采用更為準確的GPS速度對其進行校準。

TCMS校準后的動車組速度vTCMS=vBCU·K(假設采用BCU速度)。CRH5型動車組速度校準原理如圖1所示。

圖1 CRH5型動車組速度校準原理框圖
2 恒速控車原理
手動控車模式下,牽引系統通過TCMS采集司控器的級位信息,由TCU計算牽引力大小,而制動系統則獨立采集司控器的級位信息,由BCU計算電制動力及空氣制動力的大小。恒速控車模式下,考慮到控制精度、牽引及制動頻繁切換、傳輸延時等因素,采用以TCMS為主的控車機制,可以方便地集中管理和分配列車的牽引力和制動力。
恒速控車的基本原理為:主控端主處理單元實時比較當前動車組速度vTCMS與設定目標速度vSET,通過相應的控制算法,綜合司控器級位牽引力矩和BCU電制動力矩,產生調整速度所需的牽引力或制動力。當動車組速度大于35 km/h時,默認采用電制動;而當速度低于35 km/h時,實現電空轉換,采用空氣制動[2]。
CRH5型動車組恒速控車原理如圖2所示。
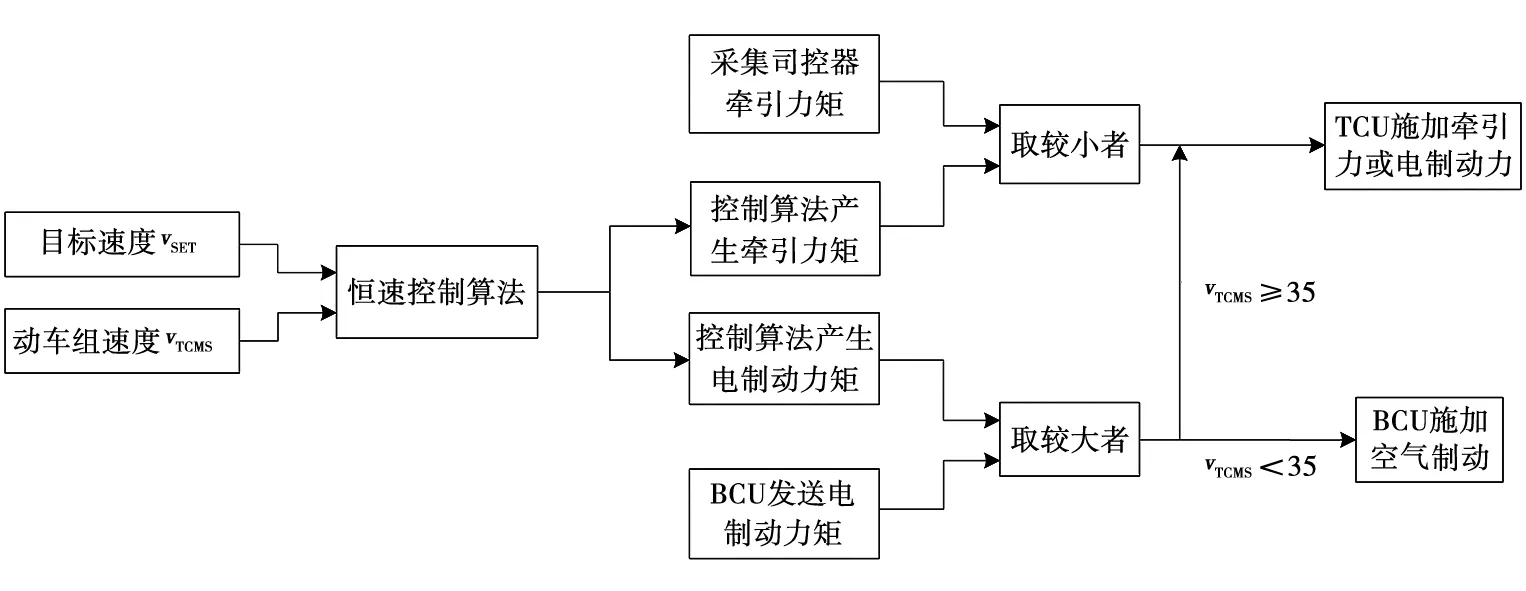
圖2 CRH5型動車組恒速控車原理框圖
3 速度不準原因分析
由第2節分析可知,動車組恒速控車僅與當前動車組速度vTCMS與設定目標速度vSET有關,目標速度一旦設置即確定,因此能否實現恒速控車的關鍵在于vTCMS是否計算準確。而根據第1節,vTCMS取決于待校準的BCU/TCU速度及校準系數K值,因此K值計算準確與否直接決定動車組速度準確性,進而影響恒速控車精度[3-5]。
如果K值計算偏小,即vTCMS偏小,而恒速控車以vTCMS為準進行調節,就會造成實際速度偏高;反之則偏低。
結合速度校準原理及大量數據分析,可能造成K值誤差較大、速度“校不準”的原因主要有幾個方面:(1)GPS信號不穩定;(2)數據更新周期差異;(3)輪徑值差異。
3.1 GPS信號不穩定
GPS信號來自PMU的GPS天線,受地形起伏、外界環境等影響較大。GPS速度是由GPS接收器利用其輸出位置數椐算出每一秒鐘的具體經緯度坐標差值,然后再除以一秒鐘,就是一秒鐘內的平均速度。動車組在運用過程中,由于運行交路的差別,經常需要穿越山脈溝谷、橋梁隧道等GPS信號較弱的區域,這種工況下經緯度坐標信息相對不準確,會導致計算得到的GPS速度出現較大誤差。如果此時正在進行速度校準系數的計算,就可能造成K值誤差較大。
GPS設備在車載應用中,由于受到車輛等外界環境的干擾,不可避免地存在靜態位置漂移和速度漂移。一般來講,GPS速度越高越準確,而速度較低時易出現速度漂移。然而,目前的算法并未對GPS設備無效漂移信號進行過濾。如果動車組在靜止狀態下,GPS速度由于速度漂移導致滿足K值計算條件,也會出現K值被錯誤計算及更新的情況。
3.2 數據更新周期差異
CRH5型動車組TCMS采用TCN標準,由列車級總線和車輛級總線2個總線層構成。車輛級總線根據功能不同又分為MVB-A信號總線、MVB-B牽引總線、MVB-C舒適總線和CAN總線。MVB-A信號總線實現MPU-LT、MPU-LC與網關之間信息交互;MVB-B牽引總線實現與牽引、制動等子系統之間的信息交互;MVB-C舒適總線實現與空調、車門等子系統之間的信息交互;CAN總線實現與PMU、軸溫檢測等子系統之間的信息交互。CRH5型動車組TCMS拓撲結構如圖3所示。
速度校準邏輯在MPU-LT中實現,TCU/BCU速度可通過MVB-B牽引總線直接獲取,而GPS速度則首先由MPU-LC通過CAN總線獲取,然后通過MVB-A信號總線轉發給MPU-LT。
TCU速度端口的刷新周期為32 ms(BCU為128 ms),PMU發送給MPU-LC的GPS速度更新周期為1 000 ms,MPU-LC再將該信息轉發給MPU-LT的周期為256 ms。從理論上講,端口刷新周期越長,速度更新周期越慢。GPS速度與BCU/TCU速度的變化頻率對比如圖4所示。

圖4 各速度變化頻率對比
計算平均速度時,可以用自速度曲線與時間軸所圍成的區域的面積表示。由圖4可以直觀看出,由于刷新周期的差異,加速階段會造成GPS平均速度小于TCU和BCU平均速度,從而造成計算的K值出現誤差;且斜率越大、加速度越大,K值誤差越大。
3.3 輪徑值差異
CRH5型動車組PMU位于6車,由于GPS速度未通過網關發送全列,因此僅8車MPU-LT可獲取。在目前的速度校準方案下,無論1車主控還是8車主控,均由8車MPU-LT計算K值,然后通過網關發送全列,因此K值實際為8車所在半列輪徑值的校準系數。
如果2個半列的輪徑值由于旋輪或磨耗造成相差較大,當1車主控時,相當于使用8車的輪徑校準系數校正1車半列的輪徑值,就會造成主控端速度誤差較大;但當8車主控時,則不存在這種問題。
4 速度校準優化方案
由上述分析可知,采用GPS信號進行速度校準的方案在較為理想的環境、較為良好的工況下可以正常發揮作用,然而當動車組運行線路多隧道或GPS信號偏弱、K值計算時車組處于急加速或急減速、GPS接收器靜止狀態下速度漂移嚴重以及2個半列輪徑值相差較大等工況下,均可能造成速度校準失效。
為有效解決該問題,本文提出了一種通過顯示屏手動設置實際輪徑值進行速度校準的方案,基本原理為使用手動設置并存儲的輪徑值計算K值,以校準BCU/TCU速度。優化方案的速度校準原理如圖5所示。

圖5 優化方案的速度校準原理框圖
4.1 輪徑值設置及保存
優化方案修改了顯示屏通信協議,優化了顯示屏軟件,增加了輪徑值設置界面及保存功能。每個司機室的顯示屏僅可設置本半列4輛車的輪徑值,按下確認按鈕時同步更新保存值。
打開輪徑值設置界面時自動讀取保存值,上電后讀取保存值并通過MVB端口實時發送至信號總線。
4.2 輪徑值獲取與校驗
動車組輪徑值的合理取值范圍為810~890 mm,在此范圍之外的輪徑值是無效的,因此使用輪徑值計算K值前必須進行有效性校驗。在輪徑值設置界面手動設置輪徑值時,顯示屏實時校驗設置的數值是否有效,無效時彈出對話框提示重新設置(圖6)。

圖6 輪徑值設置
只有在MPU-LT與顯示屏通信初建立或者手動設置輪徑值并按下確認鍵時,MPU-LT才會從MVB總線獲取更新輪徑值。而在進行后續運算之前,對更新的數值進行有效校驗,并在數值無效時通過彈屏報文提示重新設置相關輪徑值。
通過兩級校驗,可最大限度地保證輪徑值的合法性和有效性。
4.3 輪徑值選擇
由于BCU速度和TCU速度分別來自不同的車廂,所在車廂的輪徑值可能存在差異,因此對應被校準的速度源,需要選擇相應車廂的輪徑值作為K值計算依據。
以8車所在半列為例,BCU速度作為被校準速度時需采用6車輪徑值進行K值計算,而TCU速度作為被校準速度時則需采用7車和8車輪徑值的均值進行K值計算。
4.4 K值計算
BCU/TCU反饋的速度值與設定的半磨耗輪徑值成正比,而實際速度與實際輪徑值成正比,因此優化方案的速度校準系數計算方法為:K=設定輪徑值/半磨耗輪徑值。當設定輪徑值無效時,默認采用半磨耗輪徑值,算得K=1,此時相當于無校準功能。
優化方案K值計算流程如圖7所示。

圖7 優化方案K值計算流程圖
5 方案驗證
優化方案已完成試驗驗證,效果滿足要求。優化方案與原方案速度校準基本原理均為采用K值對車組的BCU/TCU速度進行校準,然而K值的計算方式截然不同,2種方案對比如表1所示。

表1 速度校準原方案與優化方案對比
6 結束語
本文通過深入研究CRH5型動車組速度校準及恒速控車原理,分析了原速度校準方案存在的缺陷,針對性地提出了一種通過手動設置輪徑值計算速度校準系數的優化方案,邏輯實現簡單可靠,適用于各種運用環境和線路工況,兩級數據校驗可有效防止K值誤算,并有效解決CRH5型動車組恒速異常問題。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
少先隊活動(2021年4期)2021-07-23 01:46:22
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
現代企業(2015年2期)2015-02-28 18:45:09
