循環(huán)神經(jīng)網(wǎng)絡(luò)在智能天平研究中的應(yīng)用1)
2021-11-10 03:45:20聶少軍汪運(yùn)鵬
力學(xué)學(xué)報(bào) 2021年8期
聶少軍 王 粵 汪運(yùn)鵬,2) 趙 敏 ** 隋 婧 **
* (中國(guó)科學(xué)院力學(xué)研究所高溫氣體動(dòng)力學(xué)國(guó)家重點(diǎn)實(shí)驗(yàn)室,北京 100190)
? (中國(guó)科學(xué)院大學(xué)工程科學(xué)學(xué)院,北京 100049)
** (中國(guó)科學(xué)院大學(xué)人工智能學(xué)院,北京 100049)
引 言
隨著航空航天技術(shù)的不斷發(fā)展,高超聲速技術(shù)受到各個(gè)航空航天大國(guó)的廣泛關(guān)注和深入研究,其科學(xué)問(wèn)題具有重要的戰(zhàn)略意義[1].對(duì)于高超聲速飛行器氣動(dòng)外形布局設(shè)計(jì)和優(yōu)化問(wèn)題,高精度氣動(dòng)力測(cè)量試驗(yàn)起到?jīng)Q定性作用.激波風(fēng)洞測(cè)力試驗(yàn)可以為高溫真實(shí)氣體效應(yīng)的研究提供可靠的數(shù)據(jù),同時(shí)為我國(guó)高超聲速飛行器研究提供關(guān)鍵技術(shù)支撐.
目前,激波風(fēng)洞測(cè)力試驗(yàn)仍存在許多未解決的關(guān)鍵技術(shù)問(wèn)題,這些問(wèn)題導(dǎo)致激波風(fēng)洞測(cè)力試驗(yàn)成為一個(gè)具有挑戰(zhàn)性的研究課題[2-4].最重要的問(wèn)題之一是模型測(cè)力系統(tǒng)(force measurement system,FMS)受瞬態(tài)流場(chǎng)起動(dòng)沖擊引起的結(jié)構(gòu)慣性振動(dòng).在進(jìn)行測(cè)力試驗(yàn)時(shí),由模型?天平?支撐構(gòu)成的測(cè)力系統(tǒng)受到瞬時(shí)沖擊而產(chǎn)生結(jié)構(gòu)振動(dòng),這些振動(dòng)信號(hào)在短時(shí)間內(nèi)無(wú)法快速衰減,導(dǎo)致測(cè)力系統(tǒng)的輸出信號(hào)中包含慣性振動(dòng)產(chǎn)生的干擾信號(hào),嚴(yán)重影響測(cè)力試驗(yàn)的精準(zhǔn)度[5].
為了解決短試驗(yàn)時(shí)間內(nèi)激波風(fēng)洞高精度測(cè)力問(wèn)題,國(guó)內(nèi)外學(xué)者開(kāi)展了許多相關(guān)研究,發(fā)展了多種類型的脈沖型風(fēng)洞天平,如壓電天平、加速度計(jì)天平、應(yīng)力波天平、補(bǔ)償型天平和脈沖型應(yīng)變天平等.在上述天平測(cè)力技術(shù)中,采用壓電陶瓷的壓電天平穩(wěn)定性相對(duì)較差,電荷泄露導(dǎo)致衰減相對(duì)較快,提高測(cè)量精度非常困難[6-7].加速度計(jì)天平[8-11]和應(yīng)力波天平[12-15]試驗(yàn)裝置成本較高且數(shù)據(jù)處理方法比較復(fù)雜.補(bǔ)償型天平只能對(duì)信號(hào)中的主頻分量進(jìn)行補(bǔ)償,無(wú)法改善非主頻分量,所以其精度有待進(jìn)一步提高[16].應(yīng)變天平剛度較低,不能直接應(yīng)用于激波風(fēng)洞這類脈沖型設(shè)備中.脈沖型應(yīng)變天平在應(yīng)變天平的基礎(chǔ)上進(jìn)行了改善,提升了天平的剛度,能夠在較短的有效試驗(yàn)時(shí)間內(nèi)獲得多個(gè)周期的信號(hào),但仍無(wú)法擺脫系統(tǒng)振動(dòng)帶來(lái)的干擾[17-19].所以,為了滿足高超聲速飛行器高精度測(cè)力試驗(yàn)的需求,發(fā)展測(cè)量精準(zhǔn)度更高、頻率響應(yīng)更快、穩(wěn)定性更強(qiáng)的新型測(cè)力系統(tǒng)很有必要,是研究激波風(fēng)洞中影響測(cè)力結(jié)果的關(guān)鍵因素,其意義非常重大.
作為激波風(fēng)洞測(cè)力試驗(yàn)中的主要測(cè)量?jī)x器,風(fēng)洞天平的校準(zhǔn)技術(shù)是測(cè)量試驗(yàn)中確保天平性能的關(guān)鍵技術(shù).一些學(xué)者將風(fēng)洞天平的動(dòng)態(tài)校準(zhǔn)定義為在靜態(tài)校準(zhǔn)的基礎(chǔ)上,利用飛行器測(cè)力標(biāo)準(zhǔn)模型在風(fēng)洞中校驗(yàn)天平性能[20].由于傳統(tǒng)風(fēng)洞試驗(yàn)中涉及到天平的動(dòng)態(tài)性能研究不多,所以關(guān)于激波風(fēng)洞測(cè)力天平動(dòng)態(tài)校準(zhǔn)方面的技術(shù)研究和工程應(yīng)用比較少.目前,有學(xué)者提出基于深度學(xué)習(xí)技術(shù)的單矢量動(dòng)態(tài)自校準(zhǔn)(single-vector dynamic self-calibration,SVDC)方法并應(yīng)用于脈沖型風(fēng)洞測(cè)力系統(tǒng)中,在其動(dòng)態(tài)天平信號(hào)樣本訓(xùn)練過(guò)程中已經(jīng)成功將卷積神經(jīng)網(wǎng)絡(luò)(convolutional neural network,CNN)模型應(yīng)用于天平測(cè)量結(jié)果的智能化處理,得到了較為理想的氣動(dòng)力載荷結(jié)果[21].基于深度學(xué)習(xí)技術(shù)的風(fēng)洞天平動(dòng)態(tài)校準(zhǔn)技術(shù)比較新穎,目前處于初步研究階段.
本文在SVDC 方法的基礎(chǔ)上,尋求新的有效訓(xùn)練模型,探索各個(gè)模型間的差異,進(jìn)一步提高智能型天平的數(shù)據(jù)處理性能及其應(yīng)用的可靠性.在神經(jīng)網(wǎng)絡(luò)模型的選取上,首先利用循環(huán)神經(jīng)網(wǎng)絡(luò)(recurrent neural network,RNN)對(duì)激波風(fēng)洞中的測(cè)力系統(tǒng)進(jìn)行人工智能建模,識(shí)別并濾除測(cè)力系統(tǒng)中的慣性振動(dòng)干擾信號(hào),力求輸出較為理想的氣動(dòng)載荷信號(hào).將RNN 模型與CNN 模型訓(xùn)練的結(jié)果進(jìn)行對(duì)比,為風(fēng)洞天平的高精度動(dòng)態(tài)校準(zhǔn)方法提供可靠的數(shù)據(jù)支撐.
1 RNN 在天平動(dòng)態(tài)校準(zhǔn)中的應(yīng)用
1.1 單矢量動(dòng)態(tài)校準(zhǔn)技術(shù)簡(jiǎn)介
傳統(tǒng)的風(fēng)洞天平一般采用階躍響應(yīng)法進(jìn)行動(dòng)態(tài)校準(zhǔn),即通過(guò)負(fù)階躍載荷單元加載方法對(duì)其施加動(dòng)態(tài)激勵(lì)進(jìn)行校準(zhǔn).該方法只能在固定的加載方向上對(duì)天平進(jìn)行動(dòng)態(tài)標(biāo)定,每次標(biāo)定試驗(yàn)時(shí)在該方向通過(guò)懸掛砝碼的方式加載,待天平結(jié)構(gòu)穩(wěn)定后,瞬間卸載產(chǎn)生階躍載荷,從而實(shí)現(xiàn)對(duì)天平施加負(fù)階躍載荷[22-25].這種動(dòng)態(tài)標(biāo)定的方法存在一定的局限性,對(duì)載荷施加方向有嚴(yán)格要求.為了滿足天平在任意方向?qū)崟r(shí)輸出多分量載荷信號(hào),發(fā)展了單矢量動(dòng)態(tài)自校準(zhǔn)技術(shù)[21].該技術(shù)中“單矢量”并不是指輸出的通道為單一方向載荷信號(hào),而是指在任意單一方向加載,該單矢量載荷可以沿著天平體軸系自動(dòng)分解成可實(shí)時(shí)輸出的多分量載荷.
單矢量動(dòng)態(tài)校準(zhǔn)技術(shù)采用十字架懸掛鋼絲的方法激勵(lì)整個(gè)測(cè)力系統(tǒng),通過(guò)在任意方向懸掛鋼絲施加單矢量載荷,剪斷鋼絲瞬間卸載產(chǎn)生階躍載荷.在鋼絲彈性極限和懸掛鋼絲十字架的范圍內(nèi),這種加載方法對(duì)載荷的施加大小、方向和作用點(diǎn)均無(wú)特殊限制.單矢量載荷的加載可以實(shí)現(xiàn)多分量階躍載荷同時(shí)精確加載,更符合實(shí)際風(fēng)洞試驗(yàn)中的氣動(dòng)力加載方式,且精準(zhǔn)度更高.單矢量動(dòng)態(tài)校準(zhǔn)詳細(xì)的實(shí)施步驟參見(jiàn)文獻(xiàn)[21].
1.2 基于RNN 的動(dòng)態(tài)模型訓(xùn)練
1.2.1 RNN 模型的構(gòu)建
對(duì)于許多復(fù)雜的機(jī)器學(xué)習(xí)問(wèn)題來(lái)說(shuō),特征提取是一件至關(guān)重要且非常困難的事情.傳統(tǒng)的機(jī)器學(xué)習(xí)方法采用人工提取特征,這種方法不僅需要花費(fèi)大量的時(shí)間和精力,而且無(wú)法很好地提取實(shí)體中的特征.深度學(xué)習(xí)方法很好的解決了這個(gè)問(wèn)題,通過(guò)堆疊多層非線性映射逼近復(fù)雜的函數(shù),自動(dòng)地從原始數(shù)據(jù)中學(xué)習(xí)層次化的特征表示,并且利用這些組合特征去解決問(wèn)題.深度學(xué)習(xí)最早應(yīng)用于圖像識(shí)別,現(xiàn)在已經(jīng)推廣到機(jī)器學(xué)習(xí)的各個(gè)領(lǐng)域,如語(yǔ)音識(shí)別、音頻識(shí)別、自然語(yǔ)言處理等[26].
針對(duì)天平輸出信號(hào)中的振動(dòng)干擾信號(hào),在采集完大量樣本數(shù)據(jù)后,采用深度學(xué)習(xí)技術(shù)中的神經(jīng)網(wǎng)絡(luò)對(duì)其進(jìn)行監(jiān)督學(xué)習(xí),可以自動(dòng)提取到振動(dòng)干擾信號(hào)的基本特征,將這些基本特征自動(dòng)組合成復(fù)雜特征,從而完成對(duì)天平干擾信號(hào)的識(shí)別.網(wǎng)絡(luò)結(jié)構(gòu),下標(biāo)t和t?1分別表示當(dāng)前時(shí)刻和上一時(shí)刻.從圖中可以看出,對(duì)于當(dāng)前時(shí)刻t,隱藏單元ht共同接受當(dāng)前輸入層數(shù)據(jù)xt和前一時(shí)刻的隱藏層狀態(tài)ht?1來(lái)產(chǎn)生輸出ot(output layer).隱藏層的回路提供了信息傳遞的通路,從而實(shí)現(xiàn)信息的存儲(chǔ)和依賴.RNN 由于自身網(wǎng)絡(luò)結(jié)構(gòu)存在延遲器(retarder)構(gòu)成回路,是一種強(qiáng)大的建模序列數(shù)據(jù)的神經(jīng)網(wǎng)絡(luò),模型訓(xùn)練通常采用基于時(shí)間的反向傳播算法(back-propagation through time,BPTT).
傳統(tǒng)的前饋神經(jīng)網(wǎng)絡(luò)同層神經(jīng)元之間沒(méi)有連接,無(wú)法處理含有時(shí)間序列的信息,因此在許多應(yīng)用中存在局限性.RNN 是深度學(xué)習(xí)技術(shù)中常見(jiàn)的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),其主要解決時(shí)序問(wèn)題,處理和預(yù)測(cè)序列數(shù)據(jù),在RNN 模型中,網(wǎng)絡(luò)具有“記憶”功能,網(wǎng)絡(luò)結(jié)構(gòu)每層之間的節(jié)點(diǎn)是有連接的,其中隱藏層(hidden layer)的輸入不僅包含輸入層(input layer)的輸出,還包含上一時(shí)刻隱藏層的輸出.圖1 展示了RNN 的

圖1 循環(huán)神經(jīng)網(wǎng)絡(luò)單元結(jié)構(gòu)示意圖Fig.1 Diagram of RNN unit
由于天平的輸出信號(hào)本質(zhì)上是一個(gè)時(shí)序動(dòng)態(tài)信號(hào),包括加載前的零值信號(hào)和加載后的氣動(dòng)力信號(hào),根據(jù)作用時(shí)間可以判斷測(cè)力系統(tǒng)的受力狀態(tài),而RNN 模型擅長(zhǎng)解決與時(shí)序相關(guān)的問(wèn)題,故采用RNN模型對(duì)天平輸出信號(hào)進(jìn)行動(dòng)態(tài)校準(zhǔn)訓(xùn)練.
在實(shí)際訓(xùn)練過(guò)程中,樣本序列過(guò)長(zhǎng)會(huì)導(dǎo)致優(yōu)化時(shí)出現(xiàn)梯度消失和梯度爆炸的問(wèn)題[27].長(zhǎng)短時(shí)記憶網(wǎng)絡(luò)(long short-term memory,LSTM)的出現(xiàn)解決了該問(wèn)題,LSTM 在RNN 的基礎(chǔ)上增加了“門”結(jié)構(gòu),并通過(guò)一些“門”結(jié)構(gòu)有選擇性地影響循環(huán)神經(jīng)網(wǎng)絡(luò)中每個(gè)時(shí)刻的狀態(tài).實(shí)踐證明采用LSTM 結(jié)構(gòu)的RNN 模型比標(biāo)準(zhǔn)的RNN 模型表現(xiàn)更好.同時(shí),在標(biāo)準(zhǔn)的RNN 模型中,狀態(tài)的傳輸是單向的,每一層的狀態(tài)傳輸都是從前往后單向進(jìn)行,然而在實(shí)踐中,當(dāng)前時(shí)刻的輸出不僅和之前的狀態(tài)有關(guān),也和之后的狀態(tài)有關(guān),所以需要采用基于LSTM 的雙向循環(huán)神經(jīng)網(wǎng)絡(luò)(bidirectional long short-term memory,Bi-LSTM).
1.2.2 樣本采集與數(shù)據(jù)處理
采用RNN 訓(xùn)練智能模型前,需要對(duì)擬標(biāo)定測(cè)力系統(tǒng)采集足夠的動(dòng)態(tài)信號(hào)訓(xùn)練樣本.訓(xùn)練樣本信號(hào)需要與實(shí)際風(fēng)洞試驗(yàn)中的天平信號(hào)具有相同的特征,需要包含系統(tǒng)振動(dòng)干擾信號(hào).基于SVDC 技術(shù)在風(fēng)洞外搭建階躍載荷采集裝置,該裝置與激波風(fēng)洞測(cè)力系統(tǒng)相同,由模型、風(fēng)洞天平和支撐結(jié)構(gòu)組成,其中模型采用半錐角為10°、長(zhǎng)度為750 mm 的標(biāo)準(zhǔn)尖錐測(cè)力模型,天平采用三分量脈沖型應(yīng)變天平,三分量依次為法向力Y、俯仰力矩MZ和軸向力X,支撐采用彎刀支撐結(jié)構(gòu),具體結(jié)構(gòu)如圖2 所示.

圖2 階躍載荷采集裝置[21]Fig.2 Step load acquisition device[21]
本文基于已搭建完的階躍載荷采集裝置采集了120 組動(dòng)態(tài)載荷信號(hào)樣本,用于RNN 模型訓(xùn)練.由于受到階躍載荷加載裝置中鋼絲的強(qiáng)度限制,采集裝置的天平輸出信號(hào)相對(duì)于實(shí)際風(fēng)洞試驗(yàn)時(shí)的輸出信號(hào)比較微弱.為了確保訓(xùn)練樣本和風(fēng)洞試驗(yàn)數(shù)據(jù)的一致性,在訓(xùn)練模型時(shí),統(tǒng)一對(duì)天平輸出信號(hào)進(jìn)行標(biāo)準(zhǔn)化處理,將數(shù)據(jù)按比例縮放,統(tǒng)一映射到一個(gè)小的特定區(qū)間內(nèi).數(shù)據(jù)的標(biāo)準(zhǔn)化便于網(wǎng)絡(luò)模型的訓(xùn)練,有利于模型收斂速度和計(jì)算精度的提升.在訓(xùn)練結(jié)束后,為了便于驗(yàn)證計(jì)算結(jié)果,再對(duì)數(shù)據(jù)進(jìn)行逆映射處理.
在標(biāo)準(zhǔn)化處理數(shù)據(jù)時(shí),采用線性轉(zhuǎn)化函數(shù)將天平的輸出信號(hào)值映射到[?1,1]之間,具體轉(zhuǎn)換函數(shù)為

式中x是原始數(shù)據(jù), m ax(|x|)是原始數(shù)據(jù)中絕對(duì)值最大的值,x?是標(biāo)準(zhǔn)化之后的數(shù)據(jù).逆映射轉(zhuǎn)換函數(shù)為

式中x′是將標(biāo)準(zhǔn)化后的數(shù)據(jù)逆映射得到的原始數(shù)據(jù).
因此,本文的基本思路就是將帶有慣性振動(dòng)干擾的動(dòng)態(tài)信號(hào)作為輸入樣本,理想階躍載荷作為目標(biāo)輸出樣本,通過(guò)構(gòu)建LSTM 和Bi-LSTM 模型訓(xùn)練樣本,對(duì)樣本中的干擾信號(hào)進(jìn)行學(xué)習(xí),識(shí)別并濾掉干擾信號(hào),從而輸出理想的氣動(dòng)力載荷信號(hào).然后將訓(xùn)練后的模型應(yīng)用于激波風(fēng)洞測(cè)力試驗(yàn)中,得到低慣性干擾或無(wú)慣性干擾的氣動(dòng)力信號(hào),進(jìn)而確保測(cè)力結(jié)果的準(zhǔn)確性.
2 RNN 動(dòng)態(tài)校準(zhǔn)模型的訓(xùn)練結(jié)果及分析
2.1 模型訓(xùn)練結(jié)果驗(yàn)證
在RNN 訓(xùn)練模型應(yīng)用于激波風(fēng)洞測(cè)力試驗(yàn)之前,需要對(duì)智能模型進(jìn)行測(cè)試,驗(yàn)證模型的可靠性.在訓(xùn)練模型前需要先打亂樣本順序,然后劃分為若干批,每一批包含部分樣本,因?yàn)殡S機(jī)打亂后的樣本比排序后的樣本更接近真實(shí)的概率分布.將采集的120 組動(dòng)態(tài)載荷信號(hào)樣本打亂順序后用于RNN 模型訓(xùn)練,其中80%的樣本作為訓(xùn)練集用來(lái)訓(xùn)練模型和學(xué)習(xí)網(wǎng)絡(luò)參數(shù),20%的樣本作為驗(yàn)證集進(jìn)行驗(yàn)證校準(zhǔn)測(cè)試.將采集到的階躍載荷樣本作為輸入,其對(duì)應(yīng)的理想階躍載荷作為目標(biāo)輸出.選取其中任意一個(gè)樣本,將其軸向力通道載荷繪制成圖3 所示.

圖3 階躍載荷信號(hào)Fig.3 Step load signal
圖3 中虛線表示采集到的階躍載荷(輸入樣本),實(shí)線表示期望輸出的理想階躍載荷(目標(biāo)樣本).該樣本的采樣時(shí)間為150 ms,理想階躍載荷前50 ms內(nèi)軸向力在0 N 附近小幅波動(dòng),在第50 ms 時(shí)發(fā)生階躍,邊沿觸發(fā)時(shí)間可以忽略不計(jì),軸向力由0 N 突變?yōu)?.7 N 左右,在后100 ms 內(nèi)保持4.7 N 不變.
采用LSTM 和Bi-LSTM 模型訓(xùn)練采集到的動(dòng)態(tài)載荷信號(hào),將輸入的訓(xùn)練樣本信號(hào)與經(jīng)過(guò)網(wǎng)絡(luò)訓(xùn)練后的3 個(gè)通道的信號(hào)結(jié)果進(jìn)行對(duì)比.圖4 展示的是軸向力通道輸入信號(hào)與經(jīng)過(guò)LSTM 和Bi-LSTM模型訓(xùn)練后的信號(hào)的對(duì)比結(jié)果.圖中虛線代表未經(jīng)網(wǎng)絡(luò)模型處理的輸入信號(hào),實(shí)線和點(diǎn)劃線分別表示經(jīng)過(guò)LSTM 和Bi-LSTM 模型處理后得到的輸出信號(hào),點(diǎn)線表示期望輸出的理想階躍載荷信號(hào).

圖4 軸向力通道輸入信號(hào)與經(jīng)過(guò)網(wǎng)絡(luò)模型處理后信號(hào)的對(duì)比Fig.4 Comparison of the input signal and validation data by training model (axial force)
由圖4 可以看出,經(jīng)過(guò)網(wǎng)絡(luò)模型處理后的信號(hào)曲線與期望輸出的理想階躍載荷信號(hào)曲線基本貼合在一起,在前50 ms 內(nèi),LSTM 和Bi-LSTM 模型的處理結(jié)果均比較理想,將輸入樣本中的干擾信號(hào)基本除掉了.在第50 ms 時(shí),載荷產(chǎn)生突變.在后續(xù)100 ms內(nèi),處理后的輸出信號(hào)基本保持為一個(gè)固定值,達(dá)到理想階躍載荷的穩(wěn)定狀態(tài).所以經(jīng)過(guò)循環(huán)神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練后的信號(hào)基本濾掉了大部分干擾信號(hào),整體上滿足了理想階躍載荷的要求.
按照同樣的方式對(duì)天平法向力和俯仰力矩通道的樣本進(jìn)行處理,將處理后的結(jié)果整理成圖5 和圖6 所示.由圖5 和圖6 可知,經(jīng)過(guò)LSTM 和Bi-LSTM 模型處理過(guò)后的信號(hào)符合理想階躍載荷的初始狀態(tài)和穩(wěn)定狀態(tài),而且邊沿時(shí)間足夠短.

圖5 法向力通道輸入信號(hào)與經(jīng)過(guò)網(wǎng)絡(luò)模型處理后信號(hào)的對(duì)比Fig.5 Comparison of the input signal and validation data by training model (normal force)

圖6 俯仰力矩通道輸入信號(hào)與經(jīng)過(guò)網(wǎng)絡(luò)模型處理后信號(hào)的對(duì)比Fig.6 Comparison of the input signal and validation data by training model (pitching moment)
經(jīng)過(guò)LSTM 和Bi-LSTM 模型訓(xùn)練后的結(jié)果比較理想,濾掉了大部分振動(dòng)信號(hào),符合理想階躍載荷的要求,達(dá)到了預(yù)期目標(biāo).但是相比于LSTM 模型,Bi-LSTM 模型的訓(xùn)練結(jié)果更好,尤其是在初始狀態(tài)和邊沿處,LSTM 模型處理的結(jié)果仍然存在一些干擾信號(hào),Bi-LSTM 模型處理的結(jié)果更穩(wěn)定,更理想.
2.2 訓(xùn)練結(jié)果誤差分析
在RNN 模型訓(xùn)練過(guò)程中,通過(guò)最小化損失函數(shù)(loss)使模型達(dá)到收斂狀態(tài).本研究采用均方誤差指標(biāo)(mean squared error,MSE)作為損失函數(shù)來(lái)評(píng)估模型的數(shù)據(jù)處理能力.MSE 指的是模型每一次輸出結(jié)果與模型輸出期望之間的誤差,MSE 的值越小,說(shuō)明預(yù)測(cè)模型試驗(yàn)數(shù)據(jù)的精確度越高.將LSTM和Bi-LSTM 模型的loss 值隨訓(xùn)練輪數(shù)(epochs)的變化情況繪制成圖7 和圖8 所示.
圖7 和圖8 中虛線和實(shí)線分別代表模型訓(xùn)練過(guò)程中的訓(xùn)練誤差和驗(yàn)證誤差.模型的初始loss 值在10?2量級(jí),隨著訓(xùn)練輪數(shù)的增加,模型的loss 值逐漸減小并趨于穩(wěn)定.當(dāng)訓(xùn)練輪數(shù)達(dá)到10 000 次時(shí),LSTM 模型的驗(yàn)證誤差值降到5.8 × 10?4,Bi-LSTM模型的驗(yàn)證誤差值降到1.3 × 10?4.此時(shí)認(rèn)為模型的誤差足夠小,已經(jīng)達(dá)到有效動(dòng)態(tài)校準(zhǔn)的標(biāo)準(zhǔn),從而驗(yàn)證了循環(huán)神經(jīng)網(wǎng)絡(luò)模型處理數(shù)據(jù)方法的可行性.根據(jù)模型訓(xùn)練的loss 數(shù)據(jù),發(fā)現(xiàn)Bi-LSTM 模型比LSTM模型訓(xùn)練效果更理想.

圖7 LSTM 模型loss 值隨訓(xùn)練輪數(shù)的變化Fig.7 Loss changes with epochs in LSTM model

圖8 Bi-LSTM 模型loss 值隨訓(xùn)練輪數(shù)的變化Fig.8 Loss changes with epochs in Bi-LSTM model
同時(shí),為了評(píng)估訓(xùn)練結(jié)果的好壞,可以采用相對(duì)誤差 δ 對(duì)訓(xùn)練結(jié)果進(jìn)行比較驗(yàn)證.選取階躍載荷卸載后的數(shù)據(jù)進(jìn)行分析,考慮到與激波風(fēng)洞試驗(yàn)實(shí)際有效時(shí)間相對(duì)應(yīng),對(duì)圖4~圖6 中經(jīng)過(guò)模型處理后的信號(hào)進(jìn)行處理,截取時(shí)間區(qū)間為70~110 ms 內(nèi)的數(shù)據(jù)平均化處理得到近似值F?和真實(shí)值F,其中FL?和FB?分別代表LSTM 和Bi-LSTM 模型訓(xùn)練得到的近似值,根據(jù)相對(duì)誤差的定義式(3)計(jì)算得到相對(duì)誤差δ ,δL和 δB分別表示LSTM 和Bi-LSTM 模型訓(xùn)練得到的相對(duì)誤差,將計(jì)算結(jié)果整理成表1 所示

表1 的數(shù)據(jù)是LSTM 和Bi-LSTM 模型經(jīng)過(guò)訓(xùn)練后的輸出信號(hào)與理想輸出信號(hào)之間的相對(duì)誤差值,兩個(gè)模型訓(xùn)練的相對(duì)誤差值均比較小,LSTM 和Bi-LSTM 模型的相對(duì)誤差 δL和δB分別在3% 和0.3%以內(nèi),與文獻(xiàn)[21]中采用CNN 模型訓(xùn)練得到結(jié)果的相對(duì)誤差(1%以內(nèi))相當(dāng),精準(zhǔn)度均比較高,且軸向力信號(hào)的相對(duì)誤差明顯小于其他兩個(gè)載荷分量的誤差.原因是在采集訓(xùn)練樣本過(guò)程中,軸向力的值比較大,占主導(dǎo)地位,其他兩個(gè)分量的值比較小,受到外界環(huán)境噪聲的干擾比較大,所以軸向力的結(jié)果相應(yīng)比較理想.同時(shí),根據(jù)表1 中 δL和 δB的數(shù)據(jù),發(fā)現(xiàn)在輸入樣本訓(xùn)練過(guò)程中,Bi-LSTM 模型的訓(xùn)練效果較LSTM模型的訓(xùn)練效果更精確.

表1 LSTM 和Bi-LSTM 模型的相對(duì)誤差Table 1 Relative error of LSTM and Bi-LSTM model
3 脈沖風(fēng)洞瞬態(tài)測(cè)力試驗(yàn)數(shù)據(jù)的智能化處理
3.1 RNN 模型應(yīng)用于激波風(fēng)洞測(cè)力系統(tǒng)
經(jīng)過(guò)對(duì)LSTM 和Bi-LSTM 模型訓(xùn)練結(jié)果的驗(yàn)證分析,發(fā)現(xiàn)模型對(duì)輸入樣本中慣性振動(dòng)干擾信號(hào)的處理非常理想,因此嘗試將該模型應(yīng)用于激波風(fēng)洞試驗(yàn)智能天平的動(dòng)態(tài)校準(zhǔn)研究中.自中國(guó)科學(xué)院力學(xué)研究所成功研制復(fù)現(xiàn)高超聲速飛行條件激波風(fēng)洞(簡(jiǎn)稱“JF-12 復(fù)現(xiàn)風(fēng)洞”)以來(lái),在該風(fēng)洞中完成了大量的高超聲速飛行器氣動(dòng)力測(cè)量試驗(yàn),并獲得了大量高精度的可靠測(cè)力數(shù)據(jù)[28].JF-12 復(fù)現(xiàn)風(fēng)洞采用反向爆轟驅(qū)動(dòng)技術(shù)[29],同時(shí)集成應(yīng)用一系列的延長(zhǎng)試驗(yàn)時(shí)間的創(chuàng)新技術(shù)[30-32],擁有復(fù)現(xiàn)25~50 km 飛行高度,馬赫數(shù)5~9 的純凈空氣氣流能力,有效試驗(yàn)時(shí)間超過(guò)了100 ms.本研究利用LSTM 和Bi-LSTM 模型對(duì)在JF-12 復(fù)現(xiàn)風(fēng)洞中進(jìn)行的750 mm標(biāo)準(zhǔn)尖錐模型測(cè)力試驗(yàn)中的三分量天平輸出信號(hào)進(jìn)行處理,將軸向力通道的處理結(jié)果展示在圖9 中.
圖9 中虛線代表風(fēng)洞試驗(yàn)中天平輸出的原始信號(hào),實(shí)線和點(diǎn)劃線分別代表經(jīng)過(guò)LSTM 和Bi-LSTM 模型處理后的輸出信號(hào),可以發(fā)現(xiàn)處理后的信號(hào)基本濾掉了大部分振動(dòng)干擾信號(hào),但是仍然表現(xiàn)出一定的周期性.在模型訓(xùn)練過(guò)程中,由于輸入樣本與風(fēng)洞試驗(yàn)測(cè)力信號(hào)存在一定的區(qū)別,而且風(fēng)洞試驗(yàn)中的真實(shí)氣動(dòng)力信號(hào)并不完全是理想的階躍載荷信號(hào),所以處理過(guò)后的信號(hào)與理想階躍載荷信號(hào)仍存在一定的偏差.在下一步模型訓(xùn)練中,可以考慮增加訓(xùn)練樣本數(shù)目,同時(shí)在采集樣本的過(guò)程,適當(dāng)消除環(huán)境噪聲的干擾,最大程度的保證采集樣本與風(fēng)洞試驗(yàn)測(cè)力信號(hào)的一致性,從而提升模型處理樣本的能力,獲得更高精度的結(jié)果.

圖9 軸向力通道風(fēng)洞試驗(yàn)信號(hào)與模型處理的信號(hào)Fig.9 Wind tunnel test signal and model processed signal (axial force)
按照同樣的方式將法向力通道和俯仰力矩通道的處理結(jié)果整理成圖10 和圖11 所示.經(jīng)過(guò)LSTM和Bi-LSTM 模型處理后的結(jié)果與風(fēng)洞試驗(yàn)信號(hào)存在明顯的區(qū)別,基本將風(fēng)洞試驗(yàn)信號(hào)中的振動(dòng)干擾信號(hào)去除掉,達(dá)到了預(yù)期目標(biāo).

圖10 法向力通道風(fēng)洞試驗(yàn)信號(hào)與模型處理的信號(hào)Fig.10 Wind tunnel test signal and model processed signal (normal force)
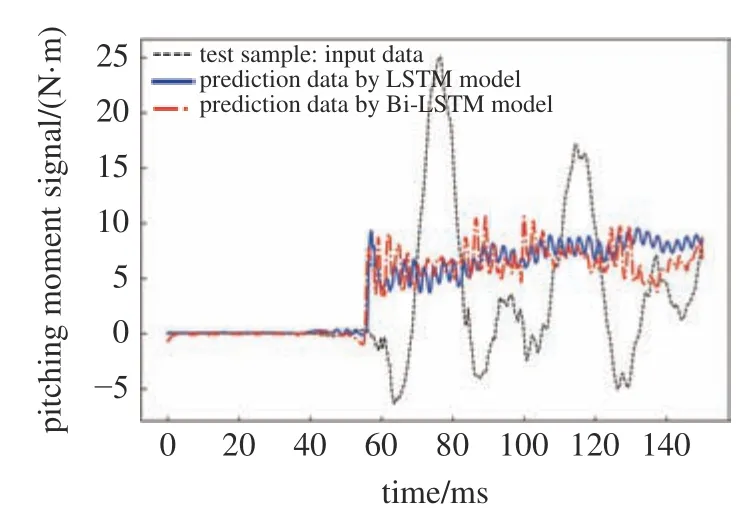
圖11 俯仰力矩通道風(fēng)洞試驗(yàn)信號(hào)與模型處理的信號(hào)Fig.11 Wind tunnel test signal and model processed signal (pitching moment)
3.2 RNN 與CNN 訓(xùn)練結(jié)果對(duì)比
對(duì)風(fēng)洞試驗(yàn)測(cè)力信號(hào)進(jìn)行誤差分析,將經(jīng)過(guò)RNN 模型處理后的結(jié)果與文獻(xiàn)[21]中經(jīng)過(guò)CNN 模型處理后的結(jié)果進(jìn)行對(duì)比,對(duì)圖9~圖11 中經(jīng)過(guò)模型處理后的信號(hào)進(jìn)行處理,截取時(shí)間為70~110 ms內(nèi)的數(shù)據(jù)進(jìn)行平均化處理,將結(jié)果整理至表2 中, δL和 δB分別表示風(fēng)洞試驗(yàn)信號(hào)經(jīng)過(guò)LSTM 和Bi-LSTM模型訓(xùn)練后得到的相對(duì)誤差.對(duì)比發(fā)現(xiàn)LSTM 與CNN 模型的誤差在4%以內(nèi),Bi-LSTM 與CNN 模型的誤差在2%以內(nèi),表明基于RNN 和CNN 模型的智能校準(zhǔn)方法均具有較高的可靠性.此外,CNN模型常用于圖像識(shí)別,處理空間信息,RNN 模型通過(guò)挖掘數(shù)據(jù)中的時(shí)序信息,更適合處理解決時(shí)序問(wèn)題,兩種神經(jīng)網(wǎng)絡(luò)模型在脈沖風(fēng)洞瞬態(tài)測(cè)力試驗(yàn)中均具有應(yīng)用前景.

表2 RNN 與CNN 模型處理數(shù)據(jù)的相對(duì)誤差Table 2 The relative errors of RNN and CNN models in processing data
由于訓(xùn)練樣本信號(hào)與風(fēng)洞試驗(yàn)信號(hào)存在一定的差別,真實(shí)氣動(dòng)力信號(hào)較理想階躍載荷信號(hào)更為復(fù)雜,因此盡管采用LSTM 型和Bi-LSTM 模型訓(xùn)練的采集樣本驗(yàn)證結(jié)果十分理想,但是將模型應(yīng)用于風(fēng)洞試驗(yàn)測(cè)力信號(hào)中仍存在一些偏差.就目前基于RNN 模型的激波風(fēng)洞智能天平研究結(jié)果而言,該智能動(dòng)態(tài)校準(zhǔn)方法在激波風(fēng)洞測(cè)力試驗(yàn)中具有應(yīng)用價(jià)值,采用該技術(shù)方法處理的測(cè)力結(jié)果的精準(zhǔn)度具有較大提升空間.
4 結(jié) 論
為了在激波風(fēng)洞短試驗(yàn)時(shí)間內(nèi)開(kāi)展高超聲速飛行器模型的精確氣動(dòng)力測(cè)量,本文在單矢量動(dòng)態(tài)自校準(zhǔn)技術(shù)的基礎(chǔ)上,在動(dòng)態(tài)信號(hào)訓(xùn)練過(guò)程中采用了RNN 對(duì)激波風(fēng)洞測(cè)力系統(tǒng)振動(dòng)特性進(jìn)行了高效建模,智能模型有效地去除了動(dòng)態(tài)測(cè)力信號(hào)中的慣性干擾信號(hào),輸出了“定常”的氣動(dòng)力載荷信號(hào).對(duì)采用RNN 模型的動(dòng)態(tài)校準(zhǔn)方法進(jìn)行了誤差分析,并將該方法與基于CNN 模型動(dòng)態(tài)校準(zhǔn)方法進(jìn)行了對(duì)比,驗(yàn)證了該方法的可靠性.將RNN 模型動(dòng)態(tài)校準(zhǔn)方法應(yīng)用于激波風(fēng)洞測(cè)力系統(tǒng)中,基本消除了天平輸出信號(hào)中的大幅振動(dòng)干擾信號(hào),取得了較為理想的效果.
目前,基于人工智能技術(shù)的測(cè)力天平智能化研究比較新穎,相關(guān)方法和技術(shù)在具有可行性和可靠性基礎(chǔ)上有待進(jìn)一步發(fā)展和完善.本研究進(jìn)一步驗(yàn)證了該方法的實(shí)用性,證明該方法在激波風(fēng)洞測(cè)力試驗(yàn)中具有應(yīng)用前景,其將為我國(guó)高超聲速飛行器高焓氣動(dòng)特性精確評(píng)估提供關(guān)鍵技術(shù)支撐.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03