基于自適應無跡卡爾曼濾波QAR數據降噪研究
2021-11-17 07:09:22王立新
計算機仿真 2021年2期
錢 宇,王立新
(中國民用航空飛行學院,四川 廣漢 618307)
1 引言
隨著科學技術的不斷發展,飛行數據記錄設備也在不斷更新升級,數據的采集數量與質量都有很大提高。快速存取記錄器(Quick Access Recorder, QAR)記載著各種飛行參數, QAR數據分析與挖掘日益受到航空公司及航空監管部門的關注。然而,傳感器記錄數據難免會受各種因素的干擾,導致譯碼后數據包含大量異常值。QAR數據有效性分析對航空公司安全運營有著極其重要的影響,為給數據分析與挖掘工作提供更可靠的數據支撐,需要對譯碼后的數據進行處理,提高QAR數據的可靠性[1-2]。
目前,很多學者在QAR數據處理方面展開深入研究。張鵬等[3]采用時間序列對QAR數據特征進行預測。楊慧等[4]介紹聚類的方法,QAR數據異常點檢測問題被有效地解決。陳聰等[5]提出平穩小波法對QAR數據進行降噪噪處理。針對大量飛行數據不能被有效利用的問題,巴塔西等[6]提出采用時間序列法進行故障預測。基于飛機在高海拔機場進近過程的QAR數據,汪清等[7]采用擴展卡爾曼濾波對相關參數進行估計。然而,上述研究存在如下不足:1)聚類法不能有效的剔除野值,時間序列法對非平穩趨勢數據預測效果較差。2)小波法、卡爾曼濾波對非線性數據無法起到好的降噪效果,擴展卡爾曼濾波對非線性數據無法精準估計且穩定性較差。3)傳統卡爾曼濾波只考慮了高斯白噪聲,這樣在未知干擾環境噪聲[8]的情況下,降噪效果會變差。
研究利用改進拉依達準則和自適應無跡卡爾曼濾波對QAR數據降噪處理。變換貝塞爾公式對拉依達準則改進,提高了數據精度,使自適應無跡卡爾曼濾波對數據降噪免受粗大誤差干擾;引入自適應噪聲估計器的無跡卡爾曼濾波算法,有效解決了對非平穩數據預測效果差、非線性數據降噪效果差及估計精度低的問題。利用空客A330飛機的兩組數據樣本對本文提到的方法仿真實驗,結果表明該方法可有效解決數據包含異常值的問題。
2 數學方法描述
2.1 拉依達準則
拉依達準則(Pauta)被用來檢測數據中的粗大誤差,要求數據量大,它以99.7%為參考標準確定置信區間范圍并計算標準偏差,凡超越此區間的誤差歸為粗大誤差應被剔除。

1)計算算術平均值
yi=xi+x0
(1)

(2)
由式(1)和(2)得算術平均值為
(3)
2)計算標準偏差
(4)


(5)
2.2 AUKF算法
為提高對非線性系統的濾波效果,Julier等人提出無跡卡爾曼濾波算法[10-11],采用對非線性系統濾波的方法,而非傳統的線性化方式。它對線性系統也能起到很好的濾波效果[12]。
1)UKF算法實現
UT變換過程如下:
①產生Sigma點
(6)
②計算權值
(7)

UKF非線性系統為:
(8)
式(8)中,f為非線性狀態方程函數,h為非線性觀測方程函數,W(k)和V(k)為協方差矩陣Q和R的高斯白噪聲。
UKF的具體推導步驟如下:
①獲取采樣點并計算權值

(9)
②計算一步預測
X(i)(k+1|k)=f[k,X(i)(k|k)]
(10)
③計算一步預測及協方差矩陣

(11)
(12)
④二次利用UT變換,得到新的Sigma點集
X(i)(k+1|k)=

(13)
⑤計算觀測量
Z(i)(k+1|k)=h[X(i)(k+1|k)]
(14)
⑥計算系統預測的均值及協方差

(15)

(16)

(17)
⑦計算Kalman增益矩陣
(18)
⑧計算系統的狀態更新和協方差更新
(k+1|k+1)=(k+1|k)+
K(k+1)[Z(k+1)-(k+1|k)]
(19)
P(k+1|k+1)=P(k+1|k)-
K(k+1)PZkZkKT(k+1)
(20)
由以上步驟可以看出,UKF對非線性濾波是在估計點附近進行UT變換,計算Sigma點集的均值及方差,再對其進行非線性映射,求得狀態概率密度函數,無需在估計點處做Taylor級數展開及前n階近似,計算更為簡單。
2)AUKF算法實現
傳感器在記錄飛行數據過程中,由于各種因素的影響,譯碼后的QAR數據可能包含其他噪聲值,這樣勢必會增大濾波降噪的偏差。為了解決此問題UKF算法結合Sage-Husa濾波算法構成AUKF算法[13-14],Sage-Husa自適應濾波器可使系統在利用原始數據進行濾波降噪的同時,對系統噪聲方差進行實時修正[15-17],大大提高了濾波降噪的精度和有效性。自適應噪聲估計器遞推過程如下
(21)
(22)
(23)

(24)
εk+1=Zk+1-k+1
(25)

(26)

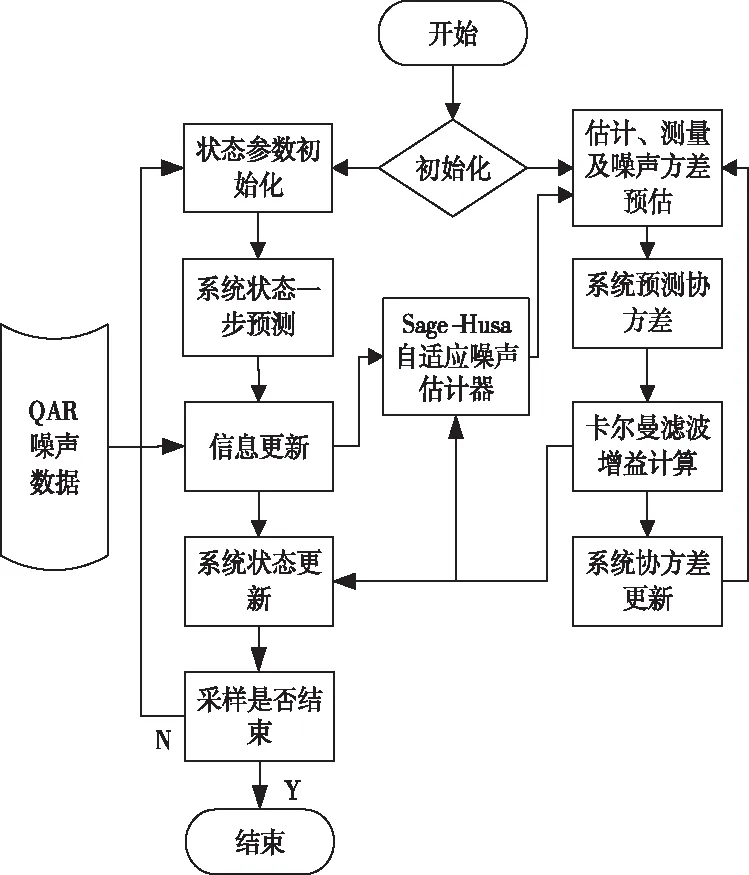
圖1 自適應無跡卡爾曼濾波降噪流程圖
3 仿真算例
研究采用空客A330飛機某次飛行任務的兩組QAR譯碼數據作為樣本數據,分別選擇真空速、偏流角各150個數據,驗證算法的可行性。
3.1 樣本數據檢測與剔除
采用改進拉依達準則檢測并剔除粗大誤差數據之前,需要檢驗數據是否滿足拉依達準則的適用條件,要求數據大致符合正態分布、數據量充分大。仿真實驗數據量分別為150,滿足數據量要求;根據QAR數據精度高的特點,由于QAR數據精度比較高,選擇2倍標準偏差作為判斷標準,|gi|>2σ時,xi為粗大誤差剔除,|gi|≤2σ時,xi為正常值保留。此時概率區間為95%,兩組樣本數據95%置信區間圖如圖2。

圖2 樣本數據置信區間圖
由圖2可以看出,兩組數據基本都分布在95%概率區間內,驗證了數據大致符合正態分布,滿足拉依達準則的適用條件。研究分別采用傳統和改進拉依達準則檢測兩組數據中的粗大誤差,并對其進行標記及剔除,處理結果如圖3。
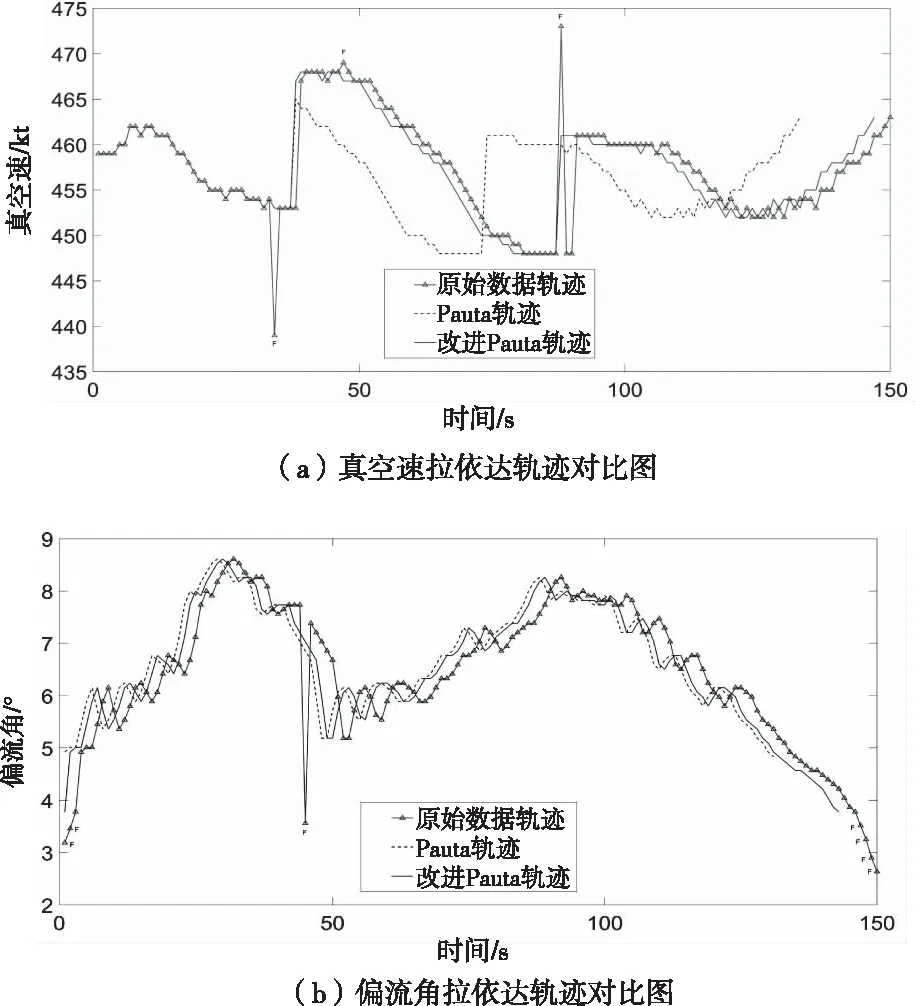
圖3 拉依達軌跡對比圖
由圖3可以看出,傳統及改進拉依達準則都能有效檢測并剔除誤差數據,傳統拉依達準則循環剔除粗大誤差后,積累誤差增大,這樣會剔除一些隨機誤差數據,而改進拉依達準則在剔除粗大誤差數據的情況下,保留了更多有用數據,避免丟失更多數據信息。傳統和改進算法處理后的數據量信息見表1。
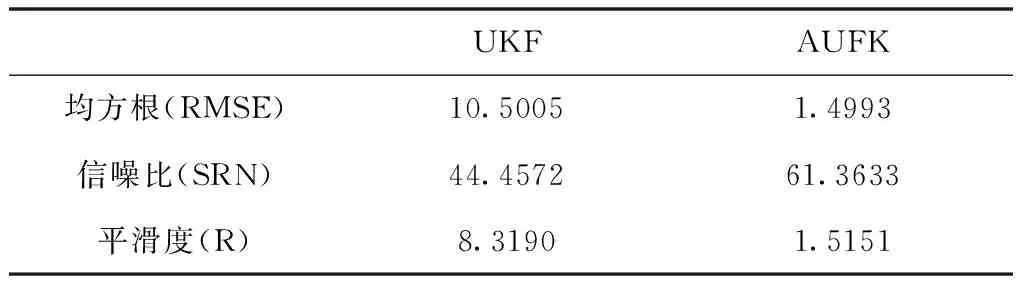
表1 拉依達準則處理前后數據量對比


(27)
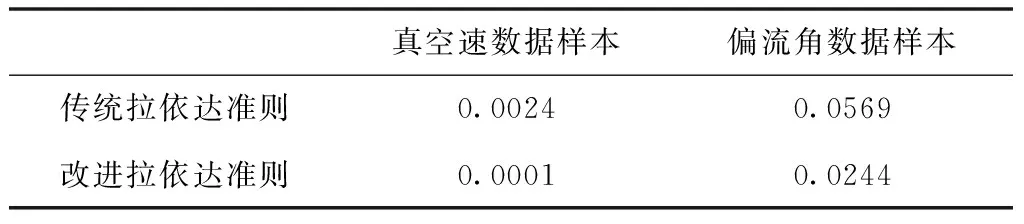
表2 樣本數據相對偏差對比
從表2的數據可以看出,采用改進拉依達準則處理的兩組數據相對偏差更小,說明改進比傳統算法處理數據的準確性更高,驗證了改進算法的有效性。
3.2 AUKF與UKF降噪對比
兩組數據樣本經改進拉依達準則處理,提高了數據的可靠性。然而傳感器在記錄數據的過程中,可能受到各種因素影響,導致譯碼后數據包含噪聲,運用AUKF算法對QAR數據進行降噪處理,更能提高數據的可靠性。
AUKF較UKF優勢在于加入了自適應濾波器,在實際應用中數據包含的噪聲不一定是高斯白噪聲,噪聲值也可能會實時的發生變化,傳統的UKF降噪的效果就會變差。根據兩組數據的實際情況,Q=0.01,R=0.25,遺忘因子b=0.96,這樣濾波降噪效果更好,兩組數據UKF濾波、AUKF濾波擬合曲線及濾波偏差對比如圖4和圖5。

圖4 UKF與AUKF軌跡對比圖
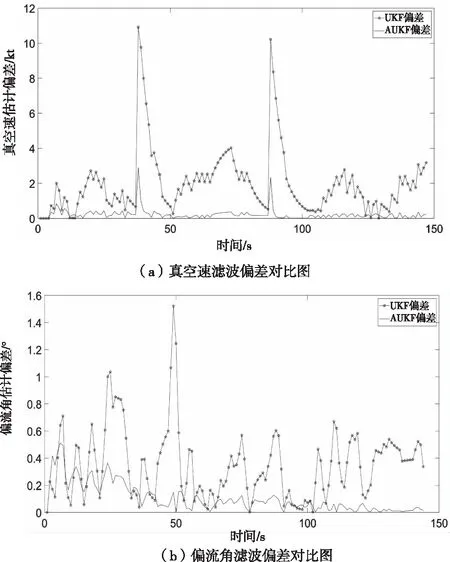
圖5 UKF與AUKF濾波偏差對比圖
從圖5可以看出,濾波后的曲線更加平滑,說明UKF和AUKF對數據降噪處理是有效的,UKF濾波曲線比AUKF濾波曲線更偏離原始數據軌跡;從圖6可以看出AUKF偏差更小,說明經AUKF處理的數據更接近于真實值,更可靠。下面利用均方根誤差、信噪比及平滑度指標對UKF和AUKF濾波降噪效果進行評估,兩種算法的對比評估具體見表3和表4。
表3 真空速UKF、AUKF降噪效果評估
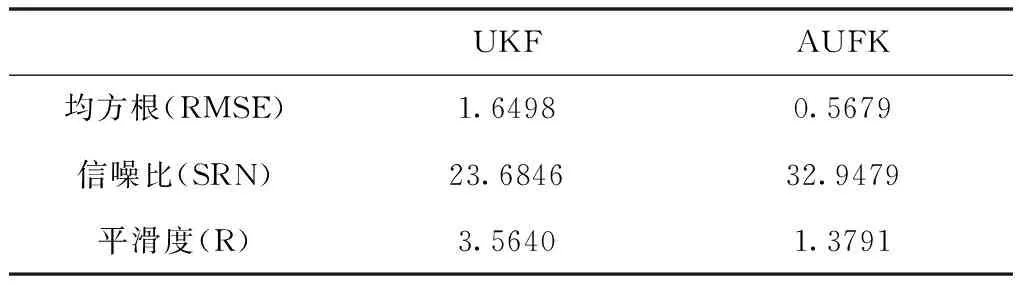
表4 偏流角UKF、AUKF降噪效果評估
根據表3和4可知,兩組數據UKF得到的信噪比小于AUKF,均方根誤差大于AUKF,說明AUKF對原始數據的處理保留了其更多的有效信息而抑制了更多噪聲;從平滑度指標來看,兩組數據UKF濾波后平滑度均大于AUKF,說明UKF濾波處理后的數據波形比AUKF濾波更加平滑,但這也從側面反應經過AUKF處理過的數據相比UKF處理過的數據而言更逼近原始數據,提高了數據的可靠性。
4 結論
1)QAR數據降噪前,需要剔除誤差數據,避免其影響降噪效果。傳統拉依達準則不能精準剔除粗大誤差數據,改進算法在高效、精確剔除誤差數據的前提下,保留了更多數據信息。
2)AUKF較UKF加入了噪聲估計器,可在線估計系統噪聲協方差,抑制初始值偏差及系統噪聲特性未知對濾波降噪穩定性的影響,估計誤差值更小,原始數據的數據信息被最大限度的保留。
3)AUKF收斂速度更快,通過兩組數據仿真結果證明了AUKF更適用于QAR數據降噪,為數據分析提供了更加可靠的數據基礎,這種數據處理方法也具有一定的現實意義。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
測控技術(2018年12期)2018-11-25 09:37:34
中華詩詞(2018年11期)2018-03-26 06:41:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
Coco薇(2016年8期)2016-10-09 02:11:50
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
中國醫藥科學(2015年19期)2015-02-27 12:33:11
