基于灰度梯度正則化的數(shù)字圖像位移標(biāo)定仿真
2021-11-17 07:10:06鄧秋菊
計算機仿真 2021年2期
關(guān)鍵詞:方法
鄧秋菊,徐 琴,王 寧
(重慶郵電大學(xué)移通學(xué)院,重慶 401520)
1 引言
標(biāo)定技術(shù)存在一定限制性,且容易受到周圍環(huán)境影響,導(dǎo)致標(biāo)定結(jié)果通常存有誤差,影響數(shù)字圖像內(nèi)容識別的準(zhǔn)確性。數(shù)字圖像位移是圖像內(nèi)容識別的重要檢測內(nèi)容,位移標(biāo)定以固定基準(zhǔn)點為參照,采用相應(yīng)的傳感器,標(biāo)定數(shù)字圖像移動點相對于固定基準(zhǔn)點的位移變化[1]。
文獻[2]提出基于遺傳算法的數(shù)字圖像位移標(biāo)定方法。該方法通過與之相關(guān)系數(shù)可實現(xiàn)對圖像匹配程度進行衡量,將歸一化函數(shù)視為相關(guān)參數(shù)和該方法的最終目的函數(shù),對目的函數(shù)進行求解,可得到圖像的位移,并對其進行標(biāo)定。但該方法的標(biāo)定精度較低,應(yīng)用效果較差;文獻[3]提出基于Tsai算法的圖像位移標(biāo)定方法。運用了攝像機鏡頭畸變模型,對成像設(shè)備的檢測系統(tǒng)進行成像誤差進行計算,同時設(shè)計出了點陣式標(biāo)定模板,對圖像位移進行標(biāo)定。但該方法過于簡單,標(biāo)定范圍有限,不適用于所有圖像位移的標(biāo)定;文獻[4]提出基于單個讀數(shù)頭檢測方法的圖像位移標(biāo)定。采用傅里葉逼近模型對讀數(shù)頭存在的誤差進行拆分,得到多次諧波的疊加,并利用檢測值差商對誤差進行估算,將差商階數(shù)增大,以降低逼近模型的誤差,并采用最小二乘法對標(biāo)定參數(shù)進行優(yōu)化,最后采用優(yōu)化后的標(biāo)定模型對圖像位移進行標(biāo)定。但該方法的穩(wěn)定性較差,且耗費成本較高。
上述方法在標(biāo)定圖像位移時,需要采用極高精準(zhǔn)度的檢測設(shè)備,導(dǎo)致成本較高,且在檢測和標(biāo)定的過程中,易受環(huán)境等影響,使最終結(jié)果帶來噪聲干擾的結(jié)果。為此,提出基于灰度梯度正則化的數(shù)字圖像位移標(biāo)定方法。經(jīng)過仿真驗證,本文方法具有較高的標(biāo)定精度,且檢測所用儀器設(shè)備簡潔,成本較低。
2 數(shù)字圖像位移標(biāo)定方法
2.1 去噪處理
由于拍攝成像時,會受到周圍環(huán)境的影響和相機鏡頭的誤差,導(dǎo)致圖像成像存在誤差。為了消除誤差,需要采取圖像去噪的方法處理圖像,同時還要標(biāo)定相機。
為了避免檢測結(jié)果存在噪聲干擾現(xiàn)象,提出基于灰度梯度正則化的圖像去噪方法[5]。該方法在以函數(shù)存在誤差為δ的情況下,創(chuàng)建泛函令目標(biāo)函數(shù)的誤差降到最小,提高灰度梯度正則化的抗噪能力。


(1)
根據(jù)灰度梯度正則化方法求得的正則解f*是一個三系樣條函數(shù),包括誤差水平參數(shù)δ,該函數(shù)的具體表達形式為
f*=aj+bj(x-xj)+cj(x-xj)2+dj(x-xj)3
x∈[xj,xj+1],j=0,1,…,n-1
(2)
式中:aj、bj、cj、dj分別表示需要求解的函數(shù)系數(shù)。
該函數(shù)的系數(shù)可以滿足以下約束條件

(3)


(4)
則誤差水平參數(shù)δ的具體表達式為

(5)
通過獲取誤差水平參數(shù),實現(xiàn)了對正則化參數(shù)的求解,從而完成圖像的去噪處理。
2.2 圖像測點位移計算
為了減少標(biāo)定存在的誤差,以及消除相機鏡頭的畸變問題,在傳統(tǒng)數(shù)字圖像相關(guān)技術(shù)上,引入位移標(biāo)定方法,完成攝像機的標(biāo)定,進而實現(xiàn)對圖像測點位移的標(biāo)定[6]。
在圖1中,假設(shè)空間某點P在世界坐標(biāo)系O-XwYwZw中的坐標(biāo)表示為(Xw,Yw,Zw)T,在攝像機坐標(biāo)系o-xyz中的坐標(biāo)表示為(x,y,z)T。(X,Y,1)T和(u,v,1)T之間的關(guān)系為

(6)
式中:dX表示像素在X軸上的距離,dY表示像素在Y軸上的距離,這兩個參數(shù)為固定存在的參數(shù),(u0,v0)T表示主點坐標(biāo)。
攝像機坐標(biāo)系坐標(biāo)(x,y,z)T和坐標(biāo)(X,Y,1)T之間的關(guān)系可用下式進行表示
(7)
式中:f表示為攝像機焦距,s表示比例系數(shù)。
(Xw,Yw,Zw)T和(x,y,z)T之間的關(guān)系為

(8)
式中:R表示坐標(biāo)旋轉(zhuǎn)矩陣,T表示由攝像機坐標(biāo)系變換到世界坐標(biāo)系的水平方向位移向量。可通過具體標(biāo)定方法對這兩個參數(shù)進行計算。
將式(6)代入到式(7)并整理,可得到

(9)
將式(8)和式(9)進行聯(lián)立,可通過坐標(biāo)(u,v,1)T對(Xw,Yw,Zw)T點在世界坐標(biāo)系中的坐標(biāo)f*進行計算。
計算比例系數(shù)s[7]。該值與世界坐標(biāo)系的選擇有關(guān),將世界坐標(biāo)系創(chuàng)建在被檢測的相機上,世界坐標(biāo)系的XWYW平面和圖像測點發(fā)生位移的平面重合,ZW軸可滿足右手坐標(biāo)系。在坐標(biāo)系中隨機選擇三點確定的平面,該平面的表達方程為
Ax+By+Cz+D=0
(10)
將式(9)轉(zhuǎn)換成方程組的形式,可得出

(11)
將式(11)代入到式(10)中,并進行整理,可得到比例系數(shù)s的計算公式為

(12)
通過在圖像上的坐標(biāo)(u,v,1)T就可計算出世界坐標(biāo)系中的坐標(biāo)(Xw,Yw,Zw)T。
2.3 相機標(biāo)定計算
為了避免圖像位移發(fā)生較大的變化,因此需要進行圖像位移標(biāo)定,最好的方法就是對相機進行標(biāo)定,只有相機配置和穩(wěn)定性保證了,才能保證圖像位移的穩(wěn)定性[8-9]。
對相機標(biāo)定時以圖像位移標(biāo)定的基礎(chǔ),作為數(shù)字圖像信息獲取的核心步驟,在標(biāo)定的過程中,由于相機鏡頭生產(chǎn)和加工的過程中會出現(xiàn)誤差的現(xiàn)象,如圖1所示。

圖1 相機誤差示意圖
為消除相機鏡頭存在的畸變現(xiàn)象,提出針對平面靶標(biāo)的標(biāo)定方法。該方法是一個非線性模型相機的線性標(biāo)定方法,只需要考慮到二階鏡像畸變,畸變模型的具體表達式可用下式進行表示

(13)

1)對單應(yīng)性矩陣進行求解


(14)
式中:A表示相機中各項參數(shù),具有含有

(15)
式中:α表示u軸的尺度因子,β表示v軸的尺度因子;γ表示u軸和v軸的水平因子。
將式(14)進行進一步變換,得出下式形式

(16)
式中:ri表示旋轉(zhuǎn)矩陣R的第i列。
通過上述變換,屆時標(biāo)定板平面上的點M和相應(yīng)的像素點m之間含有一個變換矩陣,也就是單應(yīng)性矩陣H,具體為

(17)
其中

(18)

(19)
2)相機內(nèi)部各項參數(shù)進行求解
對單應(yīng)性矩陣H進行求解后,可得出
(20)
令

(21)
則

(22)
其中

(23)
將式(20)進行改編,得出
(24)
對標(biāo)定板拍攝了n個圖像,將其轉(zhuǎn)換為方程,并組疊起來,得出Vb=0。當(dāng)對b求解后,可求出矩陣A,上述計算結(jié)果均為初始值,進行優(yōu)化搜索,進而可對相機內(nèi)部各項參數(shù)的準(zhǔn)確值進行計算。通常采集10幅以內(nèi)圖像就可以獲取到較好的標(biāo)定結(jié)果。
3 仿真證明
實驗設(shè)備為某公司生產(chǎn)的相機,采用頻率可達到55Hz,傳感器采用KODAK CCD,相加分辨率為1000(H)*1000(V),像素為8.2μm*8.2μm。光學(xué)鏡頭為15~39mm的變焦鏡頭。

圖2 實驗圖像標(biāo)定設(shè)備
實驗在配置為:CPU Intel 酷睿i5 4590 3.5Hz,主板 華碩B85M-F,內(nèi)存 金士頓駭客神條FURY 8GB DDR3 1866,硬盤希捷Barracuda 1TB 7200轉(zhuǎn) 64MB 單碟(ST1000DM003),操作系統(tǒng) Windows 7旗艦版的計算機上創(chuàng)建仿真平臺。以該平臺為背景,對以下兩幅樣本圖像進行處理。

圖3 實驗樣本圖像
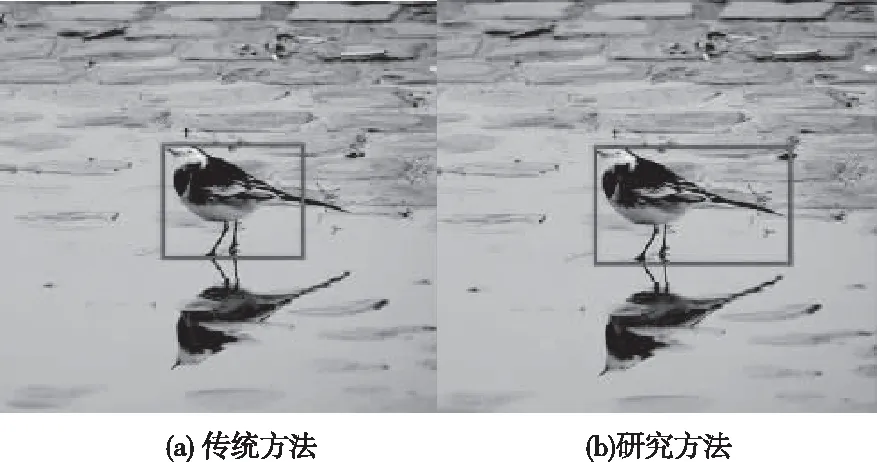
圖4 樣本一圖像位移標(biāo)定結(jié)果

圖5 樣本二圖像位移標(biāo)定結(jié)果
根據(jù)以上圖像標(biāo)定結(jié)果可知,對于兩幅樣本圖像,其主要標(biāo)記點數(shù)量是不同的,密集程度也是不同的,利用不同方法對其標(biāo)定時,會更好的驗證方法的有效性。針對于文獻[3]方法,其標(biāo)定結(jié)果雖然并無錯誤,但是標(biāo)記特征信息明顯是不完整的,當(dāng)出現(xiàn)多個特征需要被標(biāo)定時,該方法無法實現(xiàn)同時完成標(biāo)定動作,這說明傳統(tǒng)方法無法滿足目前的圖像標(biāo)定技術(shù)要求。而研究方法在標(biāo)定結(jié)果上看是更具優(yōu)勢的,不僅可以完成標(biāo)定圖像,并且其標(biāo)記對象規(guī)劃更為清晰,大大提升該方法的應(yīng)用性能。

圖6 標(biāo)定精度對比
在圖像標(biāo)定結(jié)果的基礎(chǔ)上,利用仿真平臺輸出不同方法的標(biāo)定精度,并將數(shù)據(jù)整理成圖5折線圖。從圖中各個方法的標(biāo)定精度變化走勢來看,隨著實驗次數(shù)的增多,標(biāo)定精度會降低,這是因為實驗次數(shù)越多,方法所處理的圖像數(shù)量就越多,所以精度出現(xiàn)下降是不可避免的,但是在此情況下,研究方法的精度始終較高,這說明研究方法是符合實際應(yīng)用要求的。
為了進一步驗證本文方法的有效性,將均值誤差和標(biāo)準(zhǔn)差作為本次實驗的評價指標(biāo),將本文方法的實驗結(jié)果與其它兩種方法進行對比,具體實驗結(jié)果如圖7所示:

通過分析圖7(a)得出:圖7(a)是三種方法的均值誤差對比結(jié)果,根據(jù)圖(a)可知,三種方法中基于遺傳算法的數(shù)字圖像標(biāo)定方法和Tsai標(biāo)定方法的均值誤差變化趨勢較大,其中基于遺傳算法的數(shù)字圖像標(biāo)定方法的均值誤差最大值幾乎接近0.015,最小值也超過-0.010,誤差是三種方法中最大的,而Tsai標(biāo)定方法的均值誤差相對遺傳算法要好一些;本文方法的均值誤差變化不是很大,上下波動的范圍都在-0.005~0.005之間,說明本文方法的均值誤差較小,標(biāo)定結(jié)果較準(zhǔn)確。
通過分析圖7(b)得出:圖7(b)是三種方法的表差對比結(jié)果,由圖可直接看出,Tsai標(biāo)定方法的標(biāo)準(zhǔn)差最大值幾乎接近0.045,基于遺傳算法的數(shù)字圖像標(biāo)定方法的標(biāo)準(zhǔn)差最大值也已經(jīng)超過0.030,而本文方法的標(biāo)準(zhǔn)差是三種方法中最小的,最大值沒有超過0.015,再次驗證本文方法的準(zhǔn)確性。
4 結(jié)束語
傳統(tǒng)方法標(biāo)定的數(shù)字圖像位移,由于沒有考慮到成像過程中,存在環(huán)境等因素的干擾和成像設(shè)備的鏡頭問題,導(dǎo)致標(biāo)定結(jié)果存在較大誤差。為此提出基于灰度梯度正則化的數(shù)字圖像位移標(biāo)定方法。該方法通過對兩種影響因素進行優(yōu)化,彌補了傳統(tǒng)方法的不足之處。采用灰度梯度正則化方法將圖像存在的噪聲等干擾進行消除,同時對相機的鏡頭畸變進行計算并標(biāo)定,進而實現(xiàn)對圖像測點位移的標(biāo)定。經(jīng)過仿真證明,本文方法具有較高的標(biāo)定準(zhǔn)確度,且可快速地實現(xiàn)對目標(biāo)的標(biāo)定。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
