一種改進的彩色遙感圖像邊緣檢測算法研究
2021-11-17 07:10:24韓佳雪汪西原張文坤
計算機仿真 2021年2期
關鍵詞:檢測
韓佳雪,汪西原*,2,張文坤
(1. 寧夏大學物理與電子電氣工程學院,寧夏 銀川 750021;2. 寧夏沙漠信息智能感知自治區(qū)重點實驗室,寧夏 銀川 750021)
1 引言
彩色遙感圖像的顏色空間復雜、信息量大,且邊緣亮度與色度差別較大,其邊緣輪廓中包含的信息更多,對彩色遙感圖像作精確的邊緣檢測有需求和實際意義。遙感圖像中邊緣細節(jié)信息和噪聲相當于高頻信號,紋理區(qū)域相當于中頻信號,平滑區(qū)域像素值起伏不大,即為低頻信號。常見的彩色圖像邊緣檢測方法:一是基于梯度的圖像邊緣檢測,包括傳統(tǒng)邊緣算子的擴展,如Sobel[1]、LOG[2]、Canny[3]、Prewitt等。但Prewitt算子適用于噪聲低的圖像,Sobel算子能夠平滑噪聲,但在一定程度上也對邊緣產生較寬的響應,邊緣定位不夠準確,會出現(xiàn)漏檢。LOG算子對噪聲敏感,抗噪性能較弱,而Canny算子會出現(xiàn)邊緣獨立的情況。另外還包括通過形態(tài)學算子來求取梯度,王益艷[4]等人提出了一種聯(lián)合K-means和形態(tài)學算子的圖像邊緣檢測方法,通過該方法可以準確定位邊緣,但無法剔除噪聲對邊緣的影響;二是基于彩色信息區(qū)分度的彩色圖像邊緣檢測,孫玉紅[5]等人為保留彩色圖像中的更多信息,先利用色彩對比最大化的方法灰度化彩色圖像,在此基礎上再作邊緣檢測,該方法在實驗中表現(xiàn)良好,不再簡單的受制于傳統(tǒng)的邊緣定義[5],但該方法的抗噪性有待提高;三是可以將原始彩色圖像所在的顏色空間轉換為更適合圖像處理屬性的另一種顏色空間,再作邊緣檢測。目前,有多種不同類型的顏色空間,如:HSI[6]、 HSV、 XYZ、 Lab等,張鑫鑫[6]作者提出一種基于HSI的球型顏色模型,但該方法不適用于彩色遙感圖像,會造成遙感圖像邊緣信息丟失。
針對上述邊緣定位不準確[1]、邊緣獨立[3],抗噪性能差[2,4,5]以及邊緣信息丟失[6]等問題,本文提出一種針對彩色遙感圖像邊緣檢測的算法:首先設計一種新的分數(shù)階微分掩模模板,把模板應用到Canny算子中,即用分數(shù)階微分代替Canny算子中的一階微分來求取圖像的梯度,獲得圖像邊緣信息。在此過程中引入高斯曲率濾波來獲得算法的最優(yōu)參數(shù)同時消除彩色遙感圖像中的噪聲并抑制噪聲的非線性放大。通過這種改進算法不僅可以增強彩色遙感圖像中容易被忽視的細節(jié)信息,還可以精確地檢測到圖像邊緣,并提高算法的抗噪性能。
2 改進的彩色遙感圖像邊緣檢測算法
經實驗研究和分析表明,Canny算子是在基于梯度的邊緣檢測方法中最有效的算子,能夠有效的定位圖像邊緣;分數(shù)階微分對彩色遙感圖像中的復雜紋理和弱邊緣部位能夠最大程度的被保留。所以將Canny算子加以改進,用分數(shù)階微分替換Canny算子中的一階微分,找出圖像的實際邊緣、剔除偽邊緣。但在邊緣檢測的過程中,噪聲一般屬于高頻信號,會被非線性擴散和增強,影響到邊緣檢測的精度,因此引入高斯曲率濾波理論,在消除和抑制噪聲的同時,保留圖像更多的邊緣和紋理信息。
2.1 分數(shù)階微分掩模的構造
對?α∈R,令其整數(shù)部分為[α],若信號s(t)在區(qū)間[a,t](a

(1)

(2)

(3)
定義f(x,y)在兩坐標軸x與y軸上的前n項差分近似表達式,取其前n項的和分別作為f(x,y)在x和y軸上分數(shù)階偏微分的近似值,得到式(4)和(5),再用卷積表示得到式(6)和(7),分數(shù)階微分算子的掩模為式(8)


(4)


(5)

(6)

(7)
(8)
楊柱中[7]等人根據(jù)傳統(tǒng)的Grumwald-Letnikov(G-L)分數(shù)階微分定義,拓展為二維掩膜,從而推導出了Tiansi算子。二維數(shù)字圖像信號中x和y的持續(xù)周期分別為x∈[x1,x2]和y∈[y1,y2],對圖像的微分運算從八個方向進行,在0—360度之間,以45度為間隔得到八個方向。根據(jù)式(3)的前n項系數(shù)和式(8)分數(shù)階微分掩模可以得到

(9)
依據(jù)式(9)可獲得不同尺寸的模板。本文考慮到彩色遙感圖像的屬性、模板復雜度以及邊緣檢測效果,選用掩模的尺寸大小為5*5,如圖1所示。

圖1 分數(shù)階微分掩模模板
2.2 基于分數(shù)階微分和Canny算子的彩色遙感圖像邊緣檢測算法的實現(xiàn)
基于分數(shù)階微分和Canny算子的優(yōu)化彩色遙感圖像邊緣檢測算法的實現(xiàn)步驟包括以下7步:
1)將彩色遙感圖像分為R、G、B三個分量;


(10)
(11)
3)根據(jù)式(11)確定的邊緣方向,將其分為0°,45°,90°和135°四個方向;
4)通過非最大抑制方法處理梯度圖像;
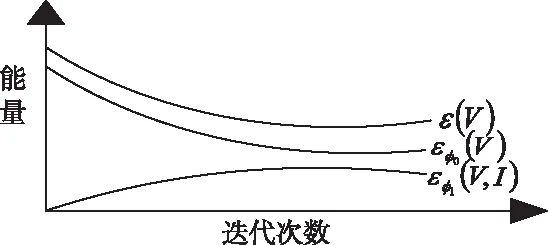
5)使用兩個閾值T1和T2做雙閾值處理,T1 6)邊緣連接; 7)三分量合成后得到邊緣檢測圖像中存在帶有顏色的噪點,故將其灰度化后,去除顏色噪點,觀察邊緣。 彩色遙感圖像細節(jié)豐富,采用較低階數(shù)處理圖像,噪聲的非線性擴散更加明顯,用高階數(shù)處理,可能會出現(xiàn)部分細節(jié)邊緣漏檢的情況。文獻[8]中提到,當分數(shù)階微分的階數(shù)v在0~1之間時,信號的低頻成分被加強,v在1~2之間時信號的高頻成分被提升。對于彩色遙感圖像而言,高中低頻信息都特別豐富,針對不同程度信號的區(qū)域選擇合適的分數(shù)階階數(shù),就尤為重要。且在獲取彩色遙感圖像時受到成像機器、日照等因素的影響,部分細節(jié)信息展示不完全、被噪聲污染。文獻[8]提到分數(shù)階微分能夠大幅度提升中高頻成分,保留低頻成分,獲取圖像細節(jié)和豐富邊緣。但即使是無噪圖像,平滑區(qū)域也存在著微弱起伏,經分數(shù)階微分處理后,出現(xiàn)明顯噪聲。更何況彩色遙感圖像,含有一定的噪聲,經分數(shù)階微分處理后,噪聲也會被非線性放大和擴散,進而影響到圖像周圍像素,使得圖像邊緣檢測的質量下降。另外Canny算子中閾值的選擇也尤為重要,文獻[9]提到閾值過高,邊緣信息檢測不全,閾值過低,則會出現(xiàn)偽邊緣。適合的閾值選擇可準確定位邊緣,剔除偽邊緣。為解決以上問題,引入高斯曲率濾波。 龔元浩博士在文獻[10]中提到用高斯曲率濾波來保留圖像細節(jié)和解決圖像噪聲問題。假設圖像是分段可展的,高斯曲率在圖像上處處為零。具有零高斯曲率的表面可以等距地映射到平面上而沒有失真。因此,最小化高斯曲率等同于使信號“盡可能可展開”,這就使得高斯曲率是一種同時保護邊緣和去除噪聲的濾波器。 高斯曲率濾波的提出是考慮最小化內存去處理非常大的圖像正適合于彩色遙感圖像。在最小化期間受到數(shù)據(jù)擬合能量和正則化能量的行為的啟發(fā), ε(V)=εφ0(V,I)+λεφ1(V) (12) 其中V是擬合能量,I是規(guī)范化數(shù)據(jù),ε(V)是總能量,εφ0(V,I)是數(shù)據(jù)擬合能量,εφ1(V)是正則化能量,λ是標量系數(shù)。且數(shù)據(jù)擬合能量總是增加,但正則化能量總是減少,如圖2,能量關系圖所示。 圖2 能量關系圖 降低正則化能量,是一種局部最小投影操作。用易于構造的三角形將相切平面TS表示為相鄰像素,以一個黑色圓圈x及其3×3鄰域為例,如圖3右圖所示。圖中柱體的高度代表不同的像素值,切平面TS(△)以頂端綠色三角形繪制。將紅球投影到綠色三角形的切線平面上和將其投影到經過x的綠色三角形邊緣上是相同的。計算(紅球)到這個綠色三角形邊緣的距離di(圖3左圖)。 圖3 切平面示意圖及切平面到邊緣距離計算示意圖 為了找到具有最小|di|的切平面,圖4是關于x的3×3像素鄰域中不包括x作為頂點的通過四個白色鄰居W一種切線三角形。 圖4 切線三角形 切線三角形可能會共享同一邊緣,并且在這些邊緣上投影,只有8個不同的di。計算全部(di,i=1…) 使用最小絕對距離作為當前強度U(x)與目標強度(x)的最小投影,使得(x)在通過相鄰像素的切面上。即最小投影dm,|dm|=min{|di|,i=1,…,8}。 d1=(U(i-1,j)+U(i+1,j))/2-U(i,j) d2=(U(i,j-1)+U(i,j+1))/2-U(i,j) d3=(U(i-1,j-1)+U(i+1,j+1))/2-U(i,j) d4=(U(i-1,j+1)+U(i+1,j-1))/2-U(i,j) d5=U(i-1,j)+U(i,j-1)-U(i-1,j-1)-U(i,j) d6=U(i-1,j)+U(i,j+1)-U(i-1,j+1)-U(i,j) d7=U(i,j-1)+U(i+1,j)-U(i+1,j+1)-U(i,j) d8=U(i,j+1)+U(i+1,j)-U(i+1,j+1)-U(i,j) |dm|=min{|di|,i=1,…,8} (13) 其中,U(i,j)表示(i,j)處的像素值,di,(i=1,…,8)是表示(i,j)點與不同領域點所在切平面的距離,(i,j)表示(i,j)處的輸出像素值。在此過程中尋找最小|di|,即高斯濾波的曲率,從而完成對整個圖像的濾波操作。 2.4.1 算法參數(shù)選擇 2.4.2 算法實現(xiàn)步驟 定義高斯曲率濾波函數(shù)為φGC,整個改進的彩色遙感圖像邊緣檢測算法的實現(xiàn)流程為: 1)規(guī)定分數(shù)階微分模板為5*5,分數(shù)階階次為(0,2),雙閾值T1=(m1,T),T2=(T,m2)高斯曲率濾波窗口為3*3; 2)輸入原始圖像,彩色遙感圖像g1; 3)分數(shù)階微分模板歸一化處理,將模板中的每一項均除以(8-12*v+4*v*v),后將模板應用到Canny算子中,得到基于分數(shù)階微分和Canny算子的彩色遙感圖像邊緣檢測算法,處理g1完成圖像的邊緣檢測處理,獲得邊緣圖像g2; 4)對g2進行高斯曲率濾波處理即φGC(g1),在此過程中尋找最小正則化能量εφ1(V),即最小距離|di|,同時獲得最優(yōu)參數(shù); 5)重復操作步驟3)4),直至高斯曲率濾波的窗函數(shù)遍歷整個圖像,得到最佳的邊緣圖像。 實驗在Windows7操作系統(tǒng),MATLAB 2014a平臺上,選取三幅彩色遙感圖像,Aircraft1和Aircraft3是來自武漢大學標注的RSOD-Dataset,Aircraft2是截取自“吉林一號”衛(wèi)星的機場圖,在原圖和加入0.05的椒鹽噪聲的情況下,實驗研究優(yōu)化算法的可行性,通過Sobel、 Roberts、Prewitt、LOG四種算子以及本文的優(yōu)化算法作對比,實驗結果見圖5。觀察分析在原圖情況下五種方法檢測結果:雖然都能檢測出彩色遙感圖像的邊緣,但Roberts算子出現(xiàn)漏檢的情況最為嚴重,Sobel和Prewitt兩種方法次之、出現(xiàn)了一些細節(jié)邊緣信息未成功檢測到的情況,LOG算子出現(xiàn)了過檢的情況、產生了偽噪聲,并且以上四種算子都出現(xiàn)了邊緣不連續(xù)的情況。本文的優(yōu)化邊緣檢測算法得到的邊緣是最完整的,能更準確地定位邊緣的位置并提取到邊緣;觀察分析在加入0.05的椒鹽噪聲情況下,Roberts、Prewitt算子基本上檢測不出邊緣,實驗結果無意義;LOG算子在加噪的Aircraft2和Aircraft3圖中能檢測到部分邊緣,但抗噪性能不足;Sobel算子雖有一定的抗噪性,但出現(xiàn)了邊緣漏檢的情況;而本文算法,在加入噪聲情況下,抗噪性能優(yōu)越,能夠定位檢測到圖像邊緣,且邊緣完整。引入定量的評價指標,用圖像熵法和峰值信噪比來表達五種算子在彩色圖像邊緣檢測中的效果。 1)圖像熵 圖像的熵是一種能夠表示圖像平均信息量的統(tǒng)計形式[13]。灰度分布的空間特征值用圖像的領域灰度均值來表示,并將空間特征值與圖像的像素灰度組成一個特征二進制組,記為(i,j),其中i表示像素的灰度值(0 <=i<=255),j表示鄰域灰度均值(0 <=j<=255),該二進制組的綜合特征如式(14),其中f(i,j)為特征二進制組(i,j)出現(xiàn)的頻率,N表示圖像的大小,那么離散的圖像二維熵為式(15)所示,分析表1中的實驗數(shù)據(jù)發(fā)現(xiàn):本文提出的關于彩色遙感圖像邊緣檢測的優(yōu)化算法在原圖情況下的圖像熵比Roberts、Prewitt、LOG與Sobel四種方法的圖像熵均高,說明本文算法在保留圖像細節(jié)方面具有優(yōu)勢;在加入噪聲情況下,Roberts、Prewitt兩種算子性能最差,LOG算子和Sobel算子的圖像熵與原圖加噪熵值相比,變化幅度最小,說明這兩種算子對噪聲不敏感,難以濾除噪聲,本文算法的在原圖和加噪情況下圖像熵值變化不大,說明本文算法的抗噪性能優(yōu)于其它四種算法。 Pij=f(i,j)/N2 (14) (15) 圖5 彩色遙感圖像五種邊緣檢測算法對比 表1 五種方法邊緣檢測結果的圖像熵(單位:比特/像素) 2)峰值信噪比 峰值信噪比(PSNR)是一個用來表示圖像失真度或是噪聲水平的定量指標。式(15)定義了峰值信噪比,式(16)為圖像的均方誤差(Mean square error,MSE),其中,I(i,j) 是不加噪聲提取的圖像邊緣信息,K(i,j)是加噪聲后提取的圖像邊緣信息,(m,n) 為圖像的大小。PSNR的值越大算法的抗噪性越好[13]。表2中的數(shù)據(jù)是通過五種方法作邊緣檢測后得到邊緣圖像的峰值信噪比,用來表征算法的濾除噪聲的能力;實驗數(shù)據(jù)表明:本文優(yōu)化算法無論是在原圖還是加入0.05椒鹽噪聲的情況下均得到了較高的PSNR,在抗噪聲性能方面具有一定的優(yōu)勢。 (15) (16) 表2 五種方法邊緣檢測結果的PSNR(單位:dB) 本文針對彩色遙感圖像邊緣檢測過程中定位不準確、信息不完整以及噪聲影響等問題,提出一種改進算法:①設計一種分數(shù)階微分模板,求取圖像梯度,改進Canny算子;②引入高斯曲率濾波理論,解決分數(shù)階微分在提升圖像的中高頻成分、保留低頻成分的同時,明顯放大了圖像噪聲的問題;③在高斯曲率濾波尋找最小正則化能量的同時,獲得最佳的分數(shù)階微分階次和Canny算子雙閾值。改進算法與常見的Roberts、Prewitt、LOG與Sobel四種算子相比,能夠準確定位邊緣,獲得更多的邊緣細節(jié)信息,抗噪性能具有明顯優(yōu)勢,更加適用于彩色遙感圖像的邊緣檢測。2.3 高斯曲率濾波理論


2.4 改進的彩色遙感圖像邊緣檢測算法參數(shù)選擇及實現(xiàn)過程

3 實驗結果與分析






4 結語
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:36
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:34
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:50
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:48
