多體組合式無人機飛行力學穩定性分析及增穩控制研究
2021-11-17 07:43:28謝長川劉東旭
工程力學 2021年11期
安 朝,謝長川,孟 楊,劉東旭,楊 超
(北京航空航天大學航空科學與工程學院,北京 100191)
在設計飛機時,充分提高飛機的飛行性能以滿足飛行任務和作戰要求,是專家學者一直追求的目標。對于高空長航時無人機而言,續航性能是飛行性能的核心要求,它直接決定了航程航時等指標。高空長航時無人機自21 世紀初開始,理論研究與工程應用方面呈現高速增長趨勢,大展弦比特性保證了其具有優異的飛行性能。但這類飛行器往往采用大量復合材料,展弦比大導致結構柔性很大,飛行過程中結構變形很大,出現幾何非線性氣動彈性問題,影響飛行安全,相關問題還未得到完全解決[1-6]。
組合式無人機是一種新概念飛行器系統,通過翼尖鉸接組合,將多個單體無人機組合成為具有大展弦比機翼的無人機整體。這一構型的飛行器具有增加展弦比,改變翼尖渦流的效果,可有效改善單體飛行器飛行力學特性及燃油消耗率[7]。氣動性能的提升意味著其機身內部空間的增大及有效載荷重量的提高。作為提升續航性能的方式,翼尖鉸接組合形式與空中加油技術相比可在一定程度上避免空中加油機的輔助燃油保障,簡化出動機種,改善機隊的出行任務規劃方法和起降保障作業的流程工作。另外,作為編隊飛行的一種,到達任務目標地后可以分離單獨執行任務,不損失機動性和操縱性,不需要其他的輔助機種和配套設施,滿足執行任務時的機動性和靈活性要求。組合式無人機兼具組合整體與分散集群優勢[8],將大展弦比無人機設計為多個小型無人機的組合體,既保留了大展弦比無人機高空長航時性能,又具有小型集群無人機分布式任務執行能力,應用潛力巨大。不過,雖然該構型飛行器在理論上具有可行性,在實際應用研究中面臨飛行力學穩定性不足,組合過程氣流干擾嚴重及組合過程中穩定性控制難度大等諸多問題,需要進行持續深入的研究。
1931 年,美國海軍的母子飛機F9C-2“獵鷹”式戰斗偵察機,通過飛機上翼掛鉤與飛艇組合成可分離回收組合體,進行了組合式飛行器的最早嘗試[9]。針對翼尖對接組合技術的最早研究出現于二戰時期,Richard-Vogt 通過給飛機兩翼翼尖附加存放額外燃油的“自由漂浮”擴展段以增加飛機航程,增加的擴展段提高了機翼展弦比,顯著降低誘導阻力[10]。20 世紀40 年代,美軍在其“Tom-Tom”計劃[11]及后續“Ficon”計劃[12]中提出了由B-29 轟炸機攜帶兩架F-84D 戰斗機組成“聯合體”的設想并進行了多次飛行對接測試。某次飛行試驗中,一架飛機從對接飛機脫離,幾秒內墜海失事。在損失多架飛機后試驗停止[11,13]。此后,對于相關組合式飛行器的飛行試驗報道很少。
組合式飛行器動力學建模一般基于帶約束的多剛體系統動力學問題進行。原則上以Newton-Eluer 方程為代表的矢量力學方法,Lagrange 方程為代表的分析力學方法以及Kane 方法等都是適用的[14]。近年來,Montalvo 等[15-17]提出元飛行器(meta aircraft)概念,假設翼尖采用磁力連接,對多種連接形態組合式飛行器(包括“一”字形、蛇形、“井”字形等)進行了氣動建模及控制應用研究,但并未給出配平計算方法。黃成凱等[18]基于元飛行器的概念,初步分析了互聯通信系統的重構問題。Magill 等[19]初步估算,組合式飛行器對于航程性能具有20%~40%的提升。葉正寅等[20-21]分析了排列體的氣動干擾問題,利用CFD 方法探索了結構參數對于排式布局氣動特性的影響規律。德國Alexander 等[22-24]利用Kane方法建立飛行力學模型,對其進行動力學分析并嘗試進行車載釋放的飛行試驗,但試驗由于動力學發散問題失敗。安朝等[25]基于Newton-Euler方程建立了翼尖鉸接飛行器動力學模型,對雙機及三機連接情況進行了配平及穩定性分析。Patterson 等[26]在針對多個飛行器連接研究的Project Link!項目中,對連接前后的氣動載荷變化進行了分析。Cooper 等[27]在該項目支持下,進行了空中連接導航算法的初步研究。
為了研究組合式無人機系統動力學特性,本文以2 架單體無人機飛行器通過翼尖鉸接形成組合式無人機系統為研究對象,基于Newton-Euler方程建立多體組合式無人機方程,采用升力線方法計算氣動力,在此基礎上進行配平計算及穩定性研究,分析該類飛行器與傳統飛行器在飛行動力學特性及穩定性上的顯著區別。在此基礎上進行增穩控制研究,為相關飛行器設計研究提供指導及參考依據。
1 組合式無人機飛行力學建模
1.1 動力學方程
本文基于Newton-Euler 方程建立動力學模型,第i個飛行器相對慣性坐標系的位置由笛卡爾坐標ri=(xi,yi,zi) 及歐拉角φi=(φi,θi,ψi)表示,其剛體運動學方程可表達為[14]:
其中,c≡cos,s≡sin。
機體坐標系符合傳統飛行定義[28],原點位于飛行器質心,x軸平行于機身軸線指向前,z軸垂直于x軸指向下,y軸滿足右手定則。S(·)為外積算子,左乘該算子矩陣即表示叉乘,S(·)具有形式如下:

1.2 氣動力模型
組合式無人機氣動力模型相對于傳統飛行器氣動力模型不同,相鄰單體飛行器間存在氣動力耦合。本文采用升力線法進行組合式無人機氣動力建模[22,29]。將機翼劃分為多個離散計算段,每段中將氣動力作用點布置在1/4 弦線上。以本文中的雙機組合為例,圖1 給出了本文研究中的氣動力模型示意圖。
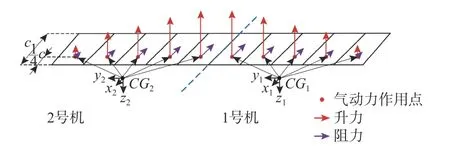
圖1 氣動力模型示意圖Fig. 1 Illustration of aerodynamics model
現在考慮組合式飛行器中第i個單體飛行器上第j個計算段的氣動力計算。由升力線理論可知,每段的渦量 Γj及誘導速度wind,j與當地有效攻角、側滑角及自由來流速度V∞,j相為關。每段升力可由Kutta-Joukowski 定理計算得到:

式中: ρ為空氣密度; Δy為每段展長。誘導阻力可計算得到:

組合式飛行器間的耦合作用體現在對于當地迎角、側滑角及來流速度的影響上,最終影響升力阻力計算。
當地來流速度為:
式中: αref,i為第i個飛行器的參考攻角;pi為滾轉角速度;qi為俯仰角速度;xj為第j個計算段至相應飛行器重心的弦向距離; ηk,i為控制面偏轉角,其下標表示第i個飛行器的第k個控制面;λk,i為控制面弦長與機翼弦長比。
側向氣動力與側滑角及零升阻力相關:

式中:CD,0為零升阻力系數,通常由工程估算方法得到;S j為計算段面積; βi為第i個飛行器的偏航角。綜合上述計算結果,第i個飛行器上的氣動力及氣動力矩由下式計算得到:
式中:A(i,a)為第i個飛行器氣動坐標系到機體坐標系的轉換矩陣;Rj為第j個計算段至相應飛行器重心的方向向量。
考慮重力及推力的影響,飛行器外力矢量可表達為:
式中:A(i,0)為第i個飛行器慣性坐標系(大地坐標系)到機體坐標系的轉換矩陣;Ti為推力矢量;Gi為重力矢量:

式中,g為重力加速度。
1.3 配平及穩定性分析
由組合式飛行器結構動力學方程式(14)、式(15)可知,與傳統飛行力學模型不同的是,該動力學模型有約束項存在。同時,根據實際約束關系可知,兩機組合形式下,每個無人機的滾轉角不再保持一致,可能存在相對滾轉運動,在求解配平方程時需要根據實際情況選擇配平變量。
組合式無人機配平及增穩控制靠各單體無人機舵面偏轉實現,由1.1 節動力學方程及1.2 節氣動力模型可知,舵面偏轉 η=[η1,1,···,ηk,j,···]T影響氣動力大小,體現在式(10)的外力矩陣B中,分離變量并只將與舵面偏轉有關項保留在動力學方程右端,可將非線性方程式(14)、式(15)表達為如下形式:

在規定好未知配平變量及配平自由度后,直接求解該非線性方程組即可給出配平狀態解F0。
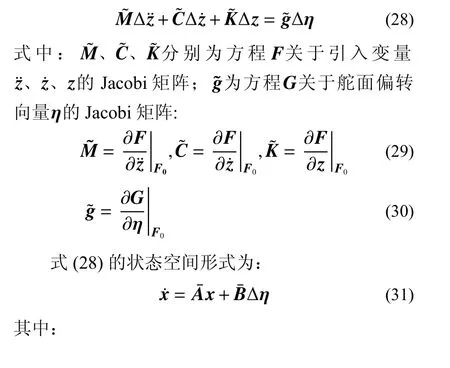
引入變量:

對式(26)在配平狀態下進行小擾動線化處理,其小擾動線化方程為:
2 組合式無人機模型
組合式無人機中單體無人機模型如圖2 所示。其機身設計參考美國Michigan 大學的X-HALE 無人機[30]。表1 給出了單體無人機的設計參數。該單體模型為雙機身結構,機翼總展長3000 mm,弦長270 mm,展弦比約為11.1,共分為3 段,其中左機翼、右機翼及中部機翼展長相等。
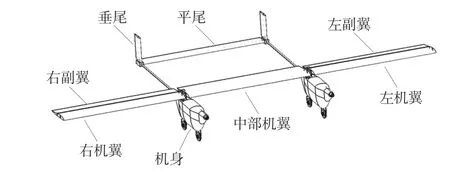
圖2 單體無人機模型Fig. 2 Model of single aircraft
表1 單體無人機設計參數Table 1 Design parameters of single aircraft
對于組合式無人機設計概念而言,每個單體飛行器都應具有獨立執行飛行任務的能力,因此,單體飛行器應具有獨立的安定面及控制面以保證其穩定性及可操縱性。本文采用的單體無人機模型中,左副翼及右副翼貫穿左機翼及右機翼,弦長占機翼弦長的1/3。尾翼由機身延伸的尾撐桿支撐,平尾及垂尾均為全動翼面,同時起到方向舵及升降舵的作用。
將兩個單體無人機間用鉸鏈連接,組成組合式飛行器。本文假設只允許單體無人機間出現沿機身軸線的相對滾轉運動,其他相對運動自由度被鉸鏈約束。由于滾轉鉸鏈連接關系的存在,機翼結構彎矩不能沿翼展方向連續傳遞,對整體組合式無人機起到結構卸載作用,結構重量系數降低。雙機組合示意圖如圖3 所示,與氣動模型敘述時一致,規定沿來流方向,左側單體無人機為1 號機,右側為2 號機。
3 配平及穩定性分析結果
本節根據飛行力學模型,針對圖3 所示雙機組合式無人機模型開展飛行力學配平求解及穩定性分析。為簡化分析計算,配平求解選擇定直平飛作為分析工況。
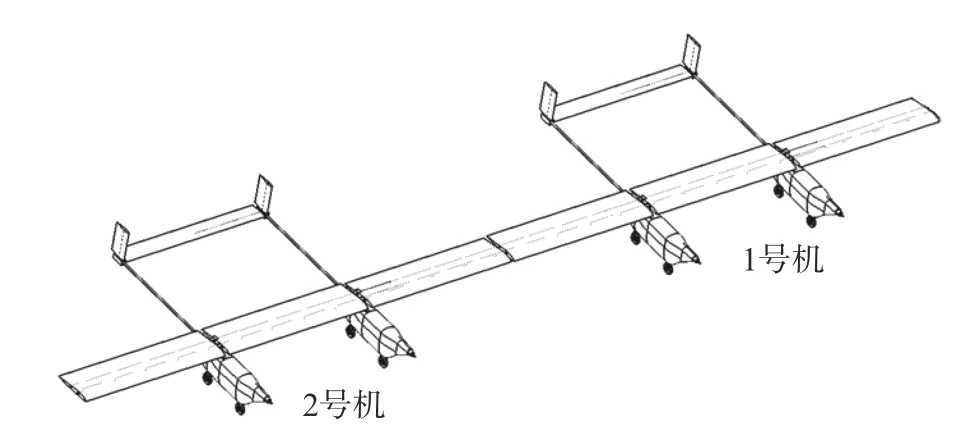
圖3 組合式無人機示意圖Fig. 3 Illustration of multi-body aircraft
3.1 配平分析
對于雙機組合形式,翼尖鉸接僅允許相對滾轉運動,式(14)具有12 個剛體運動方程及5 個約束方程,系統具有7 個自由度。每個單體飛行器具有2 個副翼控制面、1 個升降舵控制面及2 個方向舵控制面。規定每個單體飛行器的副翼控制面聯動,偏轉大小相同,方向相反即只對滾轉運動起作用;方向舵控制面聯動,偏轉大小相同,方向相同即只對偏航運動起作用。同時,由于計算工況為定直平飛,兩個單體飛行器升降舵偏轉保持一致。
由此可得,該定直平飛配平狀態下,組合式無人機未知配平量為:
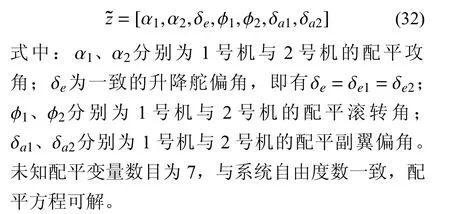
給定計算工況中空氣密度為1.225 kg/m3,飛行速度為20 m/s,配平計算結果如表2 所示,角度單位以弧度表示。
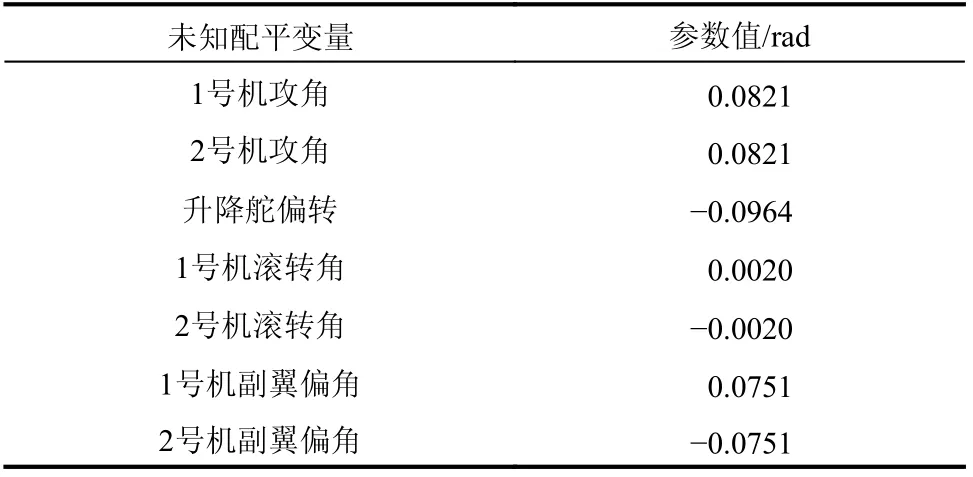
表2 配平分析結果Table 2 Results of trim analysis
由配平結果可知,該配平狀態下,配平結果全機縱向對稱,攻角計算結果兩機一致;升降舵偏角由于給定了聯動條件,兩機偏角一致。滾轉角計算大小相同、方向相反,根據坐標系方向定義可知,此時兩單體無人機“內折”。為了保證氣動力矩的平衡,兩機副翼偏轉大小相同方向相反。在單體無人機組合構型下,飛行力學橫、縱向的動力學方程不能解耦。
3.2 穩定性分析
在3.1 節配平分析結果的基礎上,進行全量非解耦的動力學方程線化得到狀態空間方向形式的小擾動動力學方程式(32),計算系統矩陣Aˉ特征值及特征向量分析動力學穩定性,其主要特征值及特征向量分析結果如表3 所示。當模態為振蕩模態時,特征時間取振蕩頻率,其特征根形式及特征時間T定義如下:

表3 特征值分析結果Table 3 Results of eigenvalue analysis
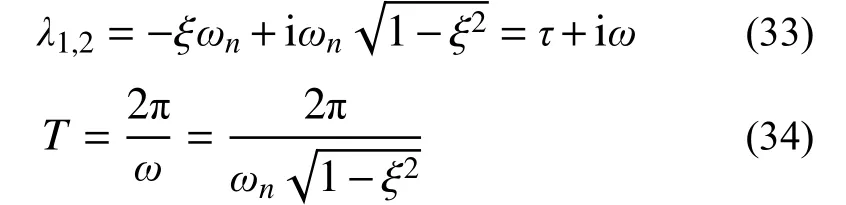
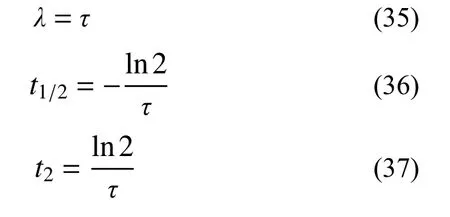
當模態為非振蕩模態時,特征時間取半衰期t1/2(模態收斂時運動參數變化到初始時的1/2)或倍幅時t2(模態發散時運動參數變化到初始時的2 倍),其特征根形式及特征時間定義如下:
分析結果可知,該飛行力學系統短周期模態、滾轉模態及荷蘭滾模態收斂,長周期模態發散,但其特征時間較長,不是飛行器穩定性關注的重點。除了傳統飛行力學模態以外,雙機組合構型多出了一個收斂模態及一個發散模態,分別命名為復合運動模態1 和復合運動模態2。2 階復合運動模態特征向量中角度量分析結果如表4 所示,角速度量分析結果如表5 所示。基于坐標系方向定義可知,收斂的復合運動模態1 是由雙機相對向上偏折的相對滾轉運動主導的運動模態,其半衰期為0.719 s;發散的復合運動模態2 是由雙機相對向下偏折的相對滾轉運動主導的運動模態,其倍幅時間為0.725 s。復合運動模態1 和模態2 的模態示意圖如圖4 及圖5 所示。發散的復合運動模態2 倍幅時間很短,對飛行穩定性影響很大,飛行器在無控狀態下無法穩定飛行,這與傳統構型飛行器有很大差別。組合式無人機系統需要采用合理的控制策略來保證其飛行穩定。

表4 復合運動模態特征向量角度量分析結果Table 4 Results of eigenvectors analysis of combined motion mode (angle)

表5 復合運動模態特征向量角速度量分析結果Table 5 Results of eigenvectors analysis of combined motion mode (angle velocity)
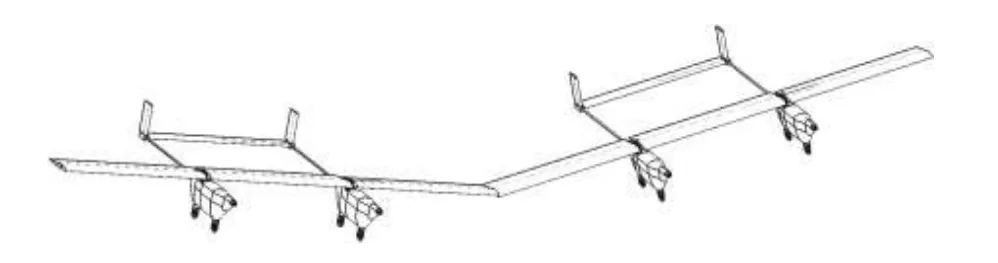
圖4 復合運動模態1Fig. 4 Combined motion mode 1
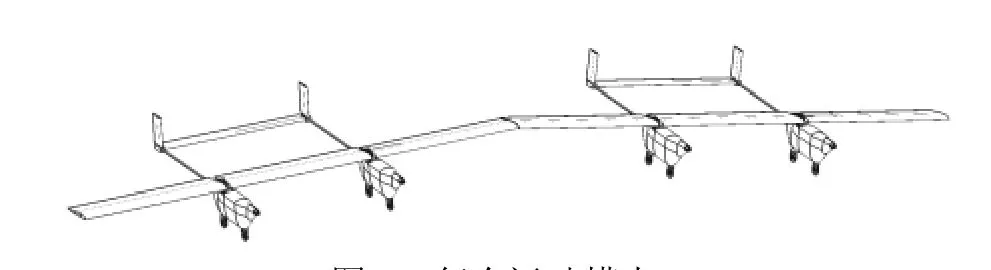
圖5 復合運動模態2Fig. 5 Combined motion mode 2
4 增穩控制設計
由于不穩定復合運動模態的存在,組合式無人機系統不能在無控狀態下穩定飛行,本文基于PID 控制方法,設計增穩控制方案,驗證有控穩定飛行的有效性。
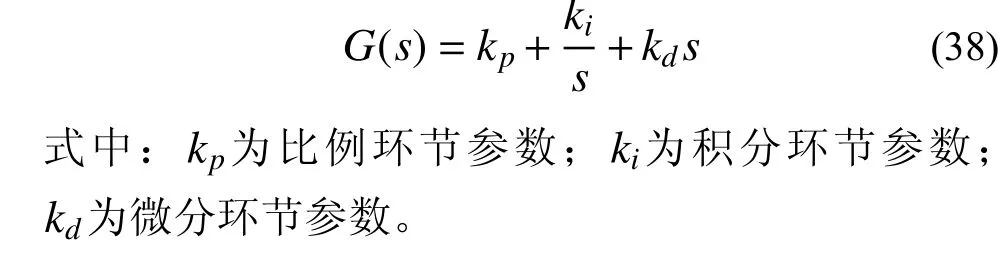
PID 控制方法是在科學研究與工業控制中常用的經典反饋控制方法,由比例單元、積分單元及微分單元組成。PID 控制的基礎是比例控制,積分控制可消除穩態誤差,但可能增加超調;微分控制可加快慣性系統響應速度以及減弱超調趨勢。PID控制原理示意圖如圖6 所示,控制律可表達如下:針對多輸入多輸出(MIMO)系統的控制律設計,可以將控制律設計簡化為多個單輸入單輸出(SISO)系統的控制律設計。本文針對雙機組合形式的組合式無人機系統,為每個單體飛行器單獨建立PID 控制回路,將期望運動參數置零,利用每個單體飛行器的滾轉角速度反饋,經過PID 控制環節,輸出副翼偏轉指令,偏轉副翼控制面以達到增穩目的。控制系統設計思路如圖7 所示。在Matlab/Simulink 中搭建控制系統進行時域仿真分析,仿真系統框圖如圖8 所示。
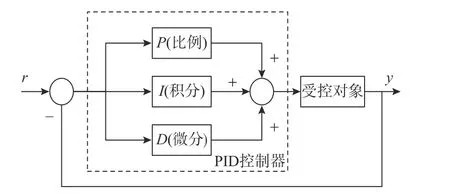
圖6 PID 控制原理Fig. 6 Illustration of PID control
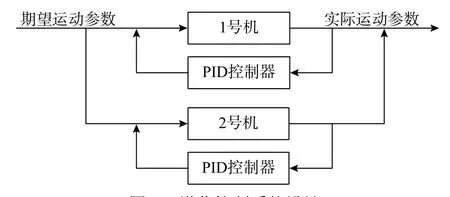
圖7 增穩控制系統設計Fig. 7 Stabilizer control system design
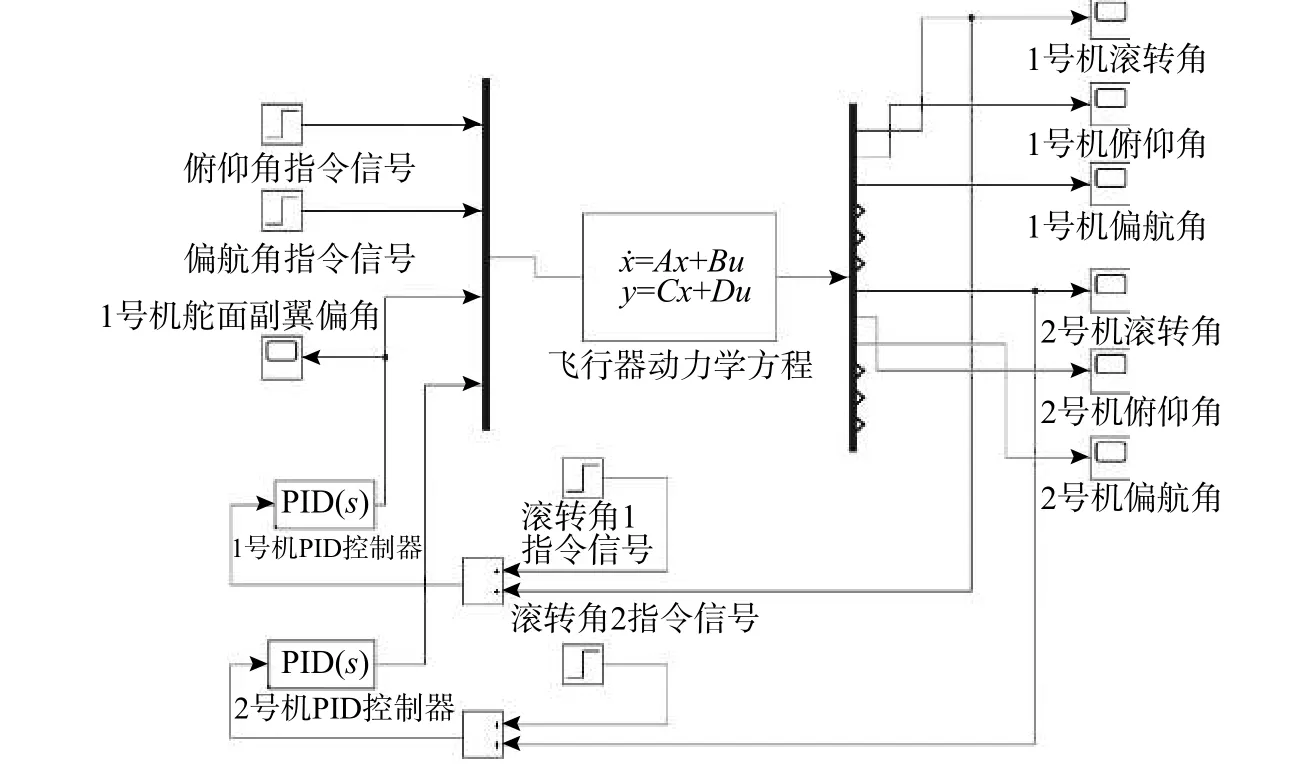
圖8 Simulink 仿真框圖Fig. 8 Diagram of Simulink
在配平狀態下給定單體無人機機滾轉角擾動0.008 rad,不開啟增穩控制系統時單體無人機滾轉角時域響應曲線如圖9 所示。兩個單體無人機的滾轉角迅速發散,且沒有振蕩過程,這與模態分析結果一致。當開啟增穩系統后,單體無人機滾轉角及滾轉角速度時域響應曲線如圖10~圖11所示。兩飛機滾轉角能夠在短時間內迅速收斂,增穩系統有效,飛機能夠在配平狀態穩定飛行。
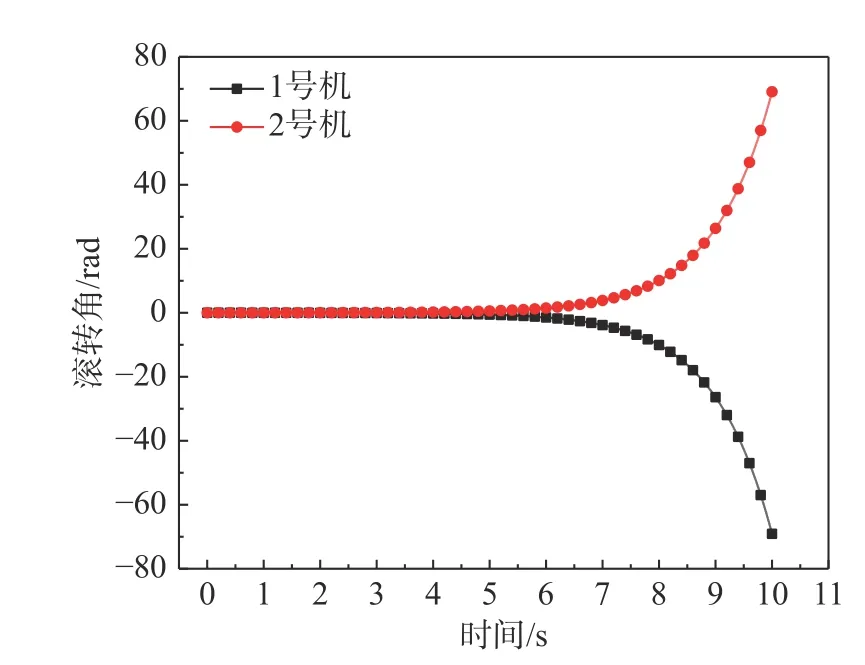
圖9 無增穩控制下滾轉角時域響應Fig. 9 Roll angle response with no control
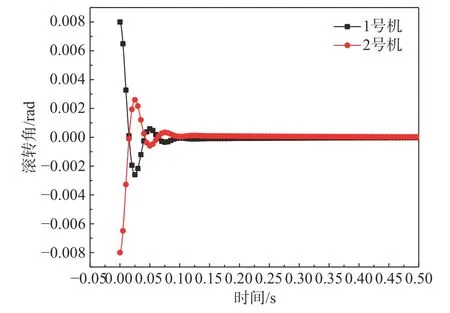
圖10 有增穩控制下滾轉角時域響應Fig. 10 Roll angle response with control
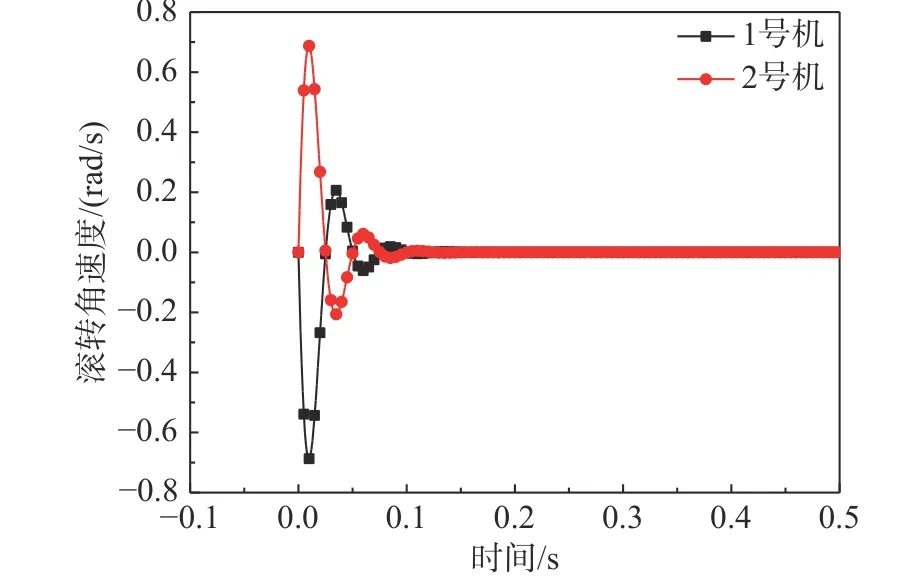
圖11 有增穩控制下滾轉角速度時域響應Fig. 11 Roll angle velocity response with control
5 結論
本文基于Newton-Euler 方程及升力線方法,建立了以雙機組合為代表的多體組合式無人機飛行動力學模型,分析其配平狀態及穩定性,并應用PID 控制方法設計了增穩控制系統,得到以下結論:
(1) 多體組合式無人機飛行力學特性與傳統飛行器有較大不同,需要針對該構型飛行器建立飛行力學模型,基于Newton-Euler 方程及升力線方法建模簡單有效;
(2) 對于雙機組合情況,動力學系統共有7 個自由度,定直平飛情況下,可配置升降舵偏角、雙機攻角、雙機滾轉角及雙機副翼舵偏角作為配平未知量,能夠求解得到合理的配平分析結果,此時飛行力學方程橫、縱向無法解耦;
(3) 在配平狀態下進行雙機組合下的動力學系統穩定性分析,相對于傳統飛行器,多出了2 階復合運動模態,均與兩個單體飛行器的相對滾轉運動相關。其中一階復合運動模態發散且倍幅時間很短,無控狀態下影響飛行器穩定性。
(4) 基于PID 控制律,對每個單體飛行器單獨建立增穩控制回路,利用每個單體飛行器的滾轉角速度反饋作為控制輸入,將副翼偏轉指令作為控制輸出,這一控制方案經仿真實現發現合理有效,可以快速鎮定發散的飛行力學系統。
本文建立了多體組合式飛行器飛行力學模型及增穩控制方案,通過配平及穩定性分析強調這一新概念飛行器飛行力學特性與傳統飛行器的區別,增穩控制方案有效,可為相關構型飛行器的設計發展提供指導。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
核科學與工程(2015年4期)2015-09-26 11:59:03
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39