基于IFOA的MEMS加速度計(jì)無轉(zhuǎn)臺(tái)標(biāo)定
2021-11-18 06:28:02戴洪德鄭偉偉鄭百東戴邵武王瑞
北京航空航天大學(xué)學(xué)報(bào) 2021年10期
關(guān)鍵詞:優(yōu)化
戴洪德,鄭偉偉,鄭百東,戴邵武,王瑞
(海軍航空大學(xué),煙臺(tái) 264001)
近年來,隨著微機(jī)電系統(tǒng)(Micro-Electro-Mechanical System,MEMS)的不斷發(fā)展,越來越多的MEMS慣性測(cè)量元件(IMU)開始出現(xiàn)在個(gè)人消費(fèi)領(lǐng)域,并逐漸得到消費(fèi)者及工程技術(shù)人員的關(guān)注。相比于傳統(tǒng)的慣性導(dǎo)航器件,MEMS加速度計(jì)具有體積小、成本低等優(yōu)勢(shì),使得其在行人導(dǎo)航、醫(yī)療救援、影視制作等方面具有廣闊的應(yīng)用前景[1]。盡管具有上述優(yōu)勢(shì),MEMS加速度計(jì)也存在著測(cè)量精度較低的不足,這成為制約其發(fā)展的一個(gè)重要因素[2]。對(duì)于提高M(jìn)EMS加速度計(jì)的測(cè)量精度,現(xiàn)階段主要有2個(gè)方向:①提高M(jìn)EMS器件的制造和封裝精度;②對(duì)MEMS加速度計(jì)的測(cè)量參數(shù)進(jìn)行標(biāo)定,利用標(biāo)定參數(shù)對(duì)測(cè)量誤差進(jìn)行補(bǔ)償[3]。由于MEMS器件的制造和封裝精度受加工設(shè)備的精度所限,短期內(nèi)無法得到較大提高,研究人員主要將重點(diǎn)放在對(duì)MEMS加速度計(jì)進(jìn)行標(biāo)定這個(gè)研究方向。
對(duì)于MEMS加速度計(jì)的標(biāo)定,較為成熟的方法是依托實(shí)驗(yàn)室三軸高精度轉(zhuǎn)臺(tái),使MEMS加速度計(jì)處于多個(gè)給定位置,通過對(duì)重力加速度輸入及加速度計(jì)輸出進(jìn)行對(duì)比,從而標(biāo)定出加速度計(jì)的各個(gè)參數(shù),典型的多位置標(biāo)定方法有六位置法[4]、十二位置法[5]及二十四位置法[6]等。盡管基于轉(zhuǎn)臺(tái)的多位置標(biāo)定方法標(biāo)定精度較高,但其標(biāo)定時(shí)需要昂貴的高精度轉(zhuǎn)臺(tái),標(biāo)定時(shí)間長(zhǎng)、程序復(fù)雜,不適用于消費(fèi)級(jí)MEMS加速度計(jì)應(yīng)用場(chǎng)景。
荷蘭學(xué)者L?tters等[7]提出一種無需依賴轉(zhuǎn)臺(tái)的標(biāo)定方法,稱為模觀測(cè)標(biāo)定法,利用三軸加速度計(jì)靜止時(shí)輸出的模值與重力加速度相等的原理建立方程組,將標(biāo)定問題轉(zhuǎn)化為非線性方程組求解問題。進(jìn)一步地,將非線性方程組左右兩端相減,構(gòu)成以非線性方程組的解為自變量的非線性函數(shù),當(dāng)非線性函數(shù)通過迭代優(yōu)化取得最小值0時(shí),即代表原非線性方程組有解,非線性函數(shù)此時(shí)的自變量即是非線性方程組的解。通過該方法,標(biāo)定問題即可轉(zhuǎn)換成函數(shù)的優(yōu)化問題。在模觀測(cè)標(biāo)定法原理的基礎(chǔ)上,瑞典學(xué)者Skog[8]、意大利學(xué)者Frosio[9]及加拿大學(xué) 者Qureshi[10]等采用牛頓迭代法優(yōu)化關(guān)于待標(biāo)定參數(shù)的非線性函數(shù),得到較高精度的標(biāo)定效果。捷克學(xué)者Sipos[11]運(yùn)用Levenberg-Marquardt算法和Thin-Shell算法優(yōu)化非線性函數(shù),得到待標(biāo)定參數(shù),并將2種算法與MATLAB中的優(yōu)化函數(shù)fm inunc進(jìn)行對(duì)比,驗(yàn)證了2種算法的可行性,且兩者具有更高的求解效率。但上述算法由于計(jì)算中涉及求解海森矩陣及矩陣求逆運(yùn)算,計(jì)算較為復(fù)雜且容易出現(xiàn)矩陣奇異問題。近年來,隨著計(jì)算機(jī)技術(shù)的快速發(fā)展,在求解非線性優(yōu)化問題領(lǐng)域中出現(xiàn)了很多智能優(yōu)化算法。粒子群優(yōu)化(PSO)算法[12-14]、遺傳算法[15-16]及自適應(yīng)遺傳算法[17]等相繼應(yīng)用到基于模觀測(cè)標(biāo)定法原理的加速度計(jì)標(biāo)定問題的求解中,為加速度計(jì)標(biāo)定提供了新的思路。但遺傳算法存在計(jì)算量大、算法復(fù)雜、精度較低的問題,而PSO算法易陷入局部極點(diǎn)[18]。
Pan[19]于2012年提出一種新的群智能優(yōu)化算法,稱為果蠅優(yōu)化算法(Fruit Fly Optimization Algorithm,F(xiàn)OA),將其應(yīng)用于企業(yè)財(cái)務(wù)困境模型的訓(xùn)練并進(jìn)行測(cè)試,具有很好的收斂性及分類預(yù)測(cè)能力。Dai等[20-21]通過增加象限判別條件改進(jìn)果蠅優(yōu)化算法的尋參范圍,其中,文獻(xiàn)[21]將改進(jìn)算法應(yīng)用于艦船甲板IMU布局優(yōu)化問題,通過實(shí)驗(yàn)驗(yàn)證了算法的有效性,之后,文獻(xiàn)[22]又提出一種具有聯(lián)合搜索策略的增強(qiáng)果蠅優(yōu)化算法,該算法基于原算法提出協(xié)作組搜索及記憶搜索策略,并結(jié)合梯度下降法進(jìn)行搜索,確保算法不陷入局部最優(yōu),并用測(cè)試函數(shù)驗(yàn)證了其魯棒性和收斂性。近年來,果蠅優(yōu)化算法及其改進(jìn)型算法被廣泛應(yīng)用于PID參數(shù)尋優(yōu)[23]、用電量預(yù)測(cè)[24]及無人機(jī)路徑規(guī)劃[25]等問題中,其實(shí)用性得到有效檢驗(yàn)。由于果蠅優(yōu)化算法及其改進(jìn)型算法原理簡(jiǎn)單、計(jì)算量小并且尋優(yōu)精度高,這些優(yōu)點(diǎn)使得其在MEMS加速度計(jì)無轉(zhuǎn)臺(tái)標(biāo)定中具有更好的應(yīng)用效果及使用價(jià)值。
針對(duì)MEMS加速度計(jì)無轉(zhuǎn)臺(tái)標(biāo)定問題,本文提出了一種基于改進(jìn)果蠅優(yōu)化算法(Improved Fruit Fly Optimization Algorithm,IFOA)的MEMS加速度計(jì)無轉(zhuǎn)臺(tái)標(biāo)定方法。首先,建立加速度計(jì)輸出模型,利用模觀測(cè)標(biāo)定法建立含有加速度計(jì)待標(biāo)定參數(shù)的非線性函數(shù)。然后,針對(duì)經(jīng)典果蠅優(yōu)化算法存在的只能搜索正參數(shù)及搜索步長(zhǎng)固定的不足,對(duì)味道濃度判定值及搜索步長(zhǎng)進(jìn)行改進(jìn),提出改進(jìn)型算法——IFOA,利用Rosen brock函數(shù)對(duì)IFOA及經(jīng)典果蠅優(yōu)化算法進(jìn)行仿真測(cè)試,驗(yàn)證了IFOA在參數(shù)尋優(yōu)范圍及尋優(yōu)精度方面的性能優(yōu)勢(shì)。最后,利用IFOA求解得到加速度計(jì)待標(biāo)定參數(shù),通過與牛頓迭代法和PSO算法進(jìn)行對(duì)比,驗(yàn)證了IFOA求解標(biāo)定問題的精確性、穩(wěn)定性及快速性。
1 基于模觀測(cè)的MEMS加速度計(jì)標(biāo)定
1.1 MEMS加速度計(jì)的輸出模型
MEMS加速度計(jì)在工作過程中的實(shí)際輸出值并不等于加速度輸入值,兩者存在一定的誤差。誤差包括確定性誤差和隨機(jī)誤差2類,確定性誤差主要由零偏、刻度因子、安裝誤差構(gòu)成,是加速度計(jì)的主要誤差[26]。因此,主要針對(duì)這3項(xiàng)誤差的標(biāo)定展開研究,并且假設(shè)安裝誤差角為小角度,因而加速度計(jì)的輸出模型可以近似寫為
為簡(jiǎn)化表達(dá),式(1)可以進(jìn)一步寫為
1.2 模觀測(cè)標(biāo)定法原理
模觀測(cè)標(biāo)定法的基本原理是:在靜止條件下,三軸加速度計(jì)上輸出的加速度模值等于重力加速度的模值。該方法最早由荷蘭學(xué)者L?tters等[7]于1998年提出。三軸加速度計(jì)在靜止條件下,只感受地球的重力加速度,測(cè)量得到的比力輸出滿足如下關(guān)系:

對(duì)式(3)兩端同時(shí)取模值[17],可以得到

根據(jù)式(4)可知,靜止條件下的加速度計(jì)輸出模值與姿態(tài)無關(guān),恒等于當(dāng)?shù)刂亓铀俣鹊哪V担?7]。根據(jù)式(2),可知

代入式(4),可得

對(duì)式(6)兩邊同時(shí)平方,得到

式(7)即為含有加速度計(jì)待標(biāo)定參數(shù)的一個(gè)非線性方程,由于上述非線性方程具有多個(gè)待求解參數(shù),需要建立多個(gè)非線性方程才能對(duì)所有參數(shù)進(jìn)行求解。通過對(duì)加速度計(jì)靜態(tài)時(shí)多個(gè)位置的觀測(cè),可以得到非線性方程組從而實(shí)現(xiàn)對(duì)所有參數(shù)的求解。而對(duì)非線性方程組的求解,可以進(jìn)一步將其轉(zhuǎn)化為非線性函數(shù)優(yōu)化問題,式(7)轉(zhuǎn)化得到的代價(jià)函數(shù)[28]為
通過優(yōu)化方法,求解代價(jià)函數(shù)(8)的最優(yōu)值,代價(jià)函數(shù)取得最優(yōu)值時(shí)所得到的參數(shù)即是加速度計(jì)待標(biāo)定參數(shù)。
在應(yīng)用模觀測(cè)標(biāo)定法進(jìn)行加速度計(jì)靜態(tài)多位置標(biāo)定時(shí),加速度計(jì)標(biāo)定的結(jié)果并不具有唯一性。根據(jù)式(6),不考慮噪聲的情況下,任意靜態(tài)位置加速度計(jì)輸出滿足:

整理可得

從式(11)可以得出,方程(9)的解并不唯一。
因此為保證標(biāo)定結(jié)果的唯一性,通過對(duì)加速度計(jì)參數(shù)坐標(biāo)系進(jìn)行明確定義[29],使安裝關(guān)系矩
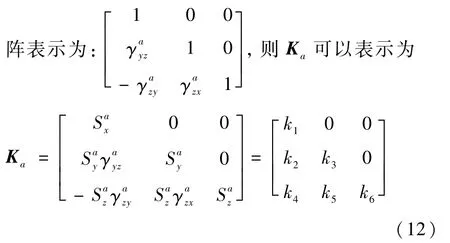
下面證明采用上述形式Ka能夠使標(biāo)定結(jié)果唯一。在不考慮噪聲的情況下,式(7)可以化簡(jiǎn)為

記Ka的逆陣為
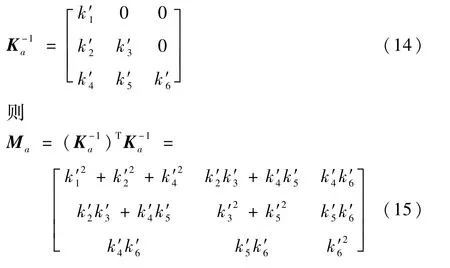
由式(13)解得Ma后,在已知Ka各元素符號(hào)的情況下,可以唯一求解各元素,由此可以唯一求解Ka,也即可以求解得到確定的加速度計(jì)待標(biāo)定參數(shù)。
2 果蠅優(yōu)化算法及其改進(jìn)
2.1 果蠅優(yōu)化算法
果蠅優(yōu)化算法由Pan[19]于2012年首次提出,是一種基于果蠅覓食行為推演出尋求全局優(yōu)化的群智能優(yōu)化新算法。果蠅通過敏銳的嗅覺搜尋周圍環(huán)境中的食物,并與果蠅群體中的其他個(gè)體共享味道濃度信息,通過比較得到擁有最佳味道濃度信息的果蠅位置,之后果蠅群體利用視覺向該位置飛去,隨后繼續(xù)展開搜索。果蠅群體搜索食物示意圖如圖1所示。
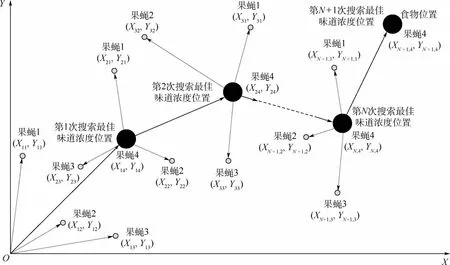
圖1 果蠅群體搜索食物示意圖Fig.1 Schematic diagram of food search by fruit fly group
圖1中,果蠅群體的規(guī)模為4,共進(jìn)行N+1次搜索,(Xij,Yij)代表每只果蠅的位置,i代表第i次搜索,j代表每次搜索中的第j只果蠅。第1次搜索中,4只果蠅從O點(diǎn)出發(fā),分別通過嗅覺向4個(gè)位置飛去,通過計(jì)算和比較,得到果蠅4所在的位置(X14,Y14)為第1次搜索最佳味道濃度位置(假設(shè)每次搜索果蠅4所在位置均為最佳味道濃度位置),因此所有果蠅利用視覺向果蠅4所在位置(X14,Y14)飛去,隨后果蠅群體從位置(X14,Y14)開始第2次搜索。以此類推,最后圖1中的每個(gè)黑色球即代表每次搜索的最佳味道濃度位置,每條黑色有向線段即代表每次搜索的最佳飛行路徑,所有黑色有向線段就構(gòu)成了果蠅群體搜尋食物的最佳飛行路徑,最終果蠅群體搜尋到食物。
果蠅優(yōu)化算法的計(jì)算步驟如下:
步驟1根據(jù)問題求解需要設(shè)定果蠅群體的規(guī)模n、迭代次數(shù)Maxgen或者求解精度ε,并隨機(jī)初始化果蠅群體的位置信息(X_axis,Y_axis)。
步驟2對(duì)果蠅群體的每個(gè)個(gè)體賦予隨機(jī)的搜索方向和距離:
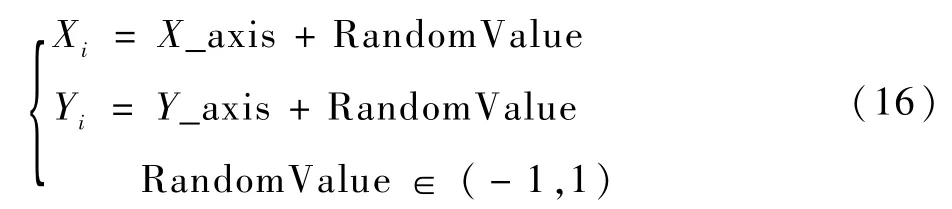
步驟3計(jì)算群體中每只果蠅的味道濃度判定值,其大小為果蠅個(gè)體與原點(diǎn)距離Disti的倒數(shù):

步驟4將得到的味道濃度判定值分別代入到味道濃度判定函數(shù)中,求出每個(gè)果蠅所處位置的味道濃度。

步驟5通過比較找到果蠅群體中的最小味道濃度及其所對(duì)應(yīng)的最佳位置。

步驟6記錄本次尋優(yōu)得到的最小味道濃度,群體中的所有果蠅利用視覺向最佳位置飛去,作為下一次迭代尋優(yōu)的初始位置。

步驟7進(jìn)行下一次迭代尋優(yōu),重復(fù)上述步驟,每代得到的最小味道濃度與上一代進(jìn)行對(duì)比,若小于上代,則繼續(xù)執(zhí)行步驟6,否則重新執(zhí)行步驟2~步驟5,直到達(dá)到設(shè)定的迭代次數(shù)或者優(yōu)化精度。
通過設(shè)定多組果蠅群體,使其進(jìn)行同時(shí)搜索,就可以實(shí)現(xiàn)對(duì)具有多參數(shù)的非線性函數(shù)的優(yōu)化求解。
2.2 改進(jìn)果蠅優(yōu)化算法
由2.1節(jié)算法步驟可以看到,果蠅優(yōu)化算法中味道濃度判定值為距離的倒數(shù),將其應(yīng)用于標(biāo)定參數(shù)求解中時(shí),最終解得的值即為加速度計(jì)待標(biāo)定的參數(shù)。在實(shí)際應(yīng)用中,待標(biāo)定的參數(shù)既有正數(shù)也有負(fù)數(shù),而味道濃度判定值根據(jù)算法設(shè)定只能為正值,因此需要對(duì)果蠅優(yōu)化算法進(jìn)行改進(jìn)才可適用于加速度計(jì)標(biāo)定參數(shù)求解。
另一方面,在Pan[19]提出的果蠅優(yōu)化算法中,其搜索Random Value步長(zhǎng)只在固定取值范圍(-1,1)之間,即搜索半徑固定為1,這就導(dǎo)致對(duì)于不同的實(shí)際問題,搜索半徑可能出現(xiàn)不匹配的情況。搜索半徑如果相對(duì)初值來說過小,則其對(duì)味道濃度判定值的影響很小,會(huì)導(dǎo)致算法陷入局部最優(yōu);而當(dāng)搜索半徑相對(duì)初值來說過大時(shí),會(huì)出現(xiàn)過早收斂,求解精度降低。針對(duì)上述不足,提出改進(jìn)型算法——IFOA,對(duì)步驟2中個(gè)體搜索方式改進(jìn)如下:
式中:Δ為初始化時(shí)設(shè)定的搜索半徑;α為搜索半徑權(quán)重系數(shù),α∈(0,1);p為精確度系數(shù),其計(jì)算方式如下:

其中:Smellbest為尋優(yōu)得到的最小味道濃度;σ為精確度閾值;[·]為取整函數(shù)。
對(duì)步驟3中味道濃度判定值的計(jì)算方法改進(jìn)如下:

上述IFOA相比于果蠅優(yōu)化算法的優(yōu)勢(shì)主要體現(xiàn)在以下2點(diǎn):
1)通過設(shè)置αp,使原先的固定半徑搜索轉(zhuǎn)化為可變半徑搜索,當(dāng)最小味道濃度Smell best大于設(shè)定的精確度閾值σ時(shí),仍以固定半徑進(jìn)行搜索;而當(dāng)Smell best小于設(shè)定的精確度閾值σ時(shí),精確度系數(shù)p將隨著Smellbest的變小而變大,從而使搜索半徑不斷縮小,有效避免了固定半徑搜索容易出現(xiàn)的早熟收斂現(xiàn)象,從而保證了IFOA兼具全局優(yōu)化性能和局部?jī)?yōu)化性能。
2)用Xi替換1/Disti作為味道濃度判定值Si,使得Si取值范圍變?yōu)?-∞,+∞),從而實(shí)現(xiàn)算法對(duì)于負(fù)參數(shù)的求解。
IFOA流程如圖2所示。

圖2 IFOA流程Fig.2 Flowchart of improved fruit fly optimization algorithm
上述算法是針對(duì)單參數(shù)的非線性函數(shù)進(jìn)行優(yōu)化的IFOA,而對(duì)于具有多參數(shù)的非線性函數(shù)優(yōu)化問題,如加速度計(jì)標(biāo)定問題,就需要在算法中設(shè)置多個(gè)果蠅種群,使每個(gè)果蠅種群搜索一個(gè)參數(shù),多個(gè)種群同時(shí)進(jìn)行搜索時(shí),就可以對(duì)多參數(shù)的非線性函數(shù)進(jìn)行優(yōu)化,并求解得到多個(gè)待定參數(shù)。多種群IFOA示意圖如圖3所示。
在圖3中,果蠅群體的規(guī)模為4,(Xikj)代表每只果蠅的位置,i代表第i次搜索,k代表第k組果蠅種群,j代表每組種群中第j只果蠅,S1~Sk表示k個(gè)參數(shù)。
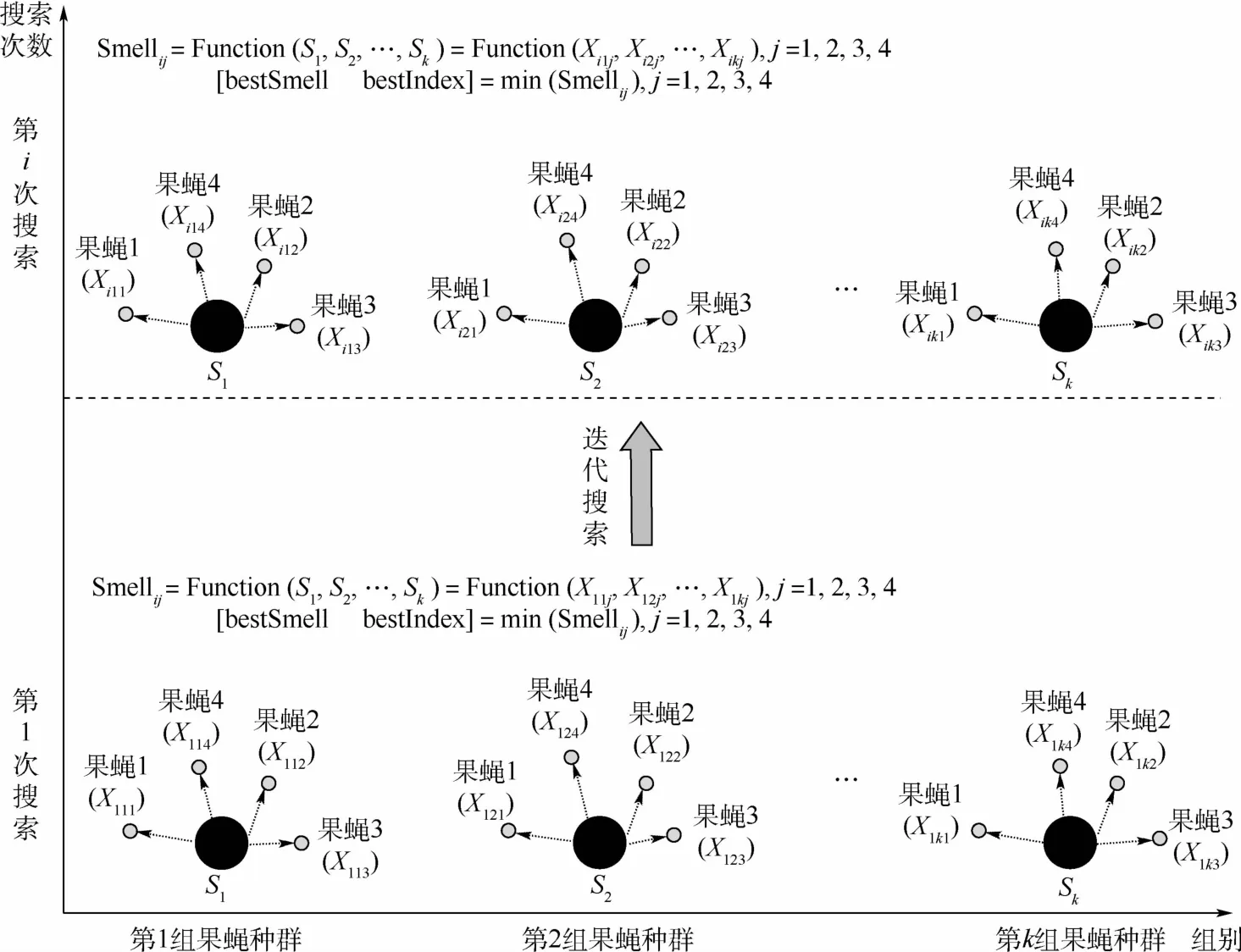
圖3 多種群IFOA示意圖Fig.3 Schematic diagram of multi-population improved fruit fly optimization algorithm
第1次搜索中,所有組果蠅種群中的4個(gè)果蠅都同時(shí)搜索隨機(jī)距離,得到每只果蠅的位置(X1kj)值。首先取各組種群中果蠅1的值作為參數(shù)的值,即(S1,S2,…,Sk)=(X111,X121,…,X1k1),代入代價(jià)函數(shù)Function中得到Smell11,之后依次取各組種群中果蠅2、果蠅3、果蠅4重復(fù)上述計(jì)算,共得到Smell11、Smell12、Smell13、Smell14四個(gè)味道濃度值,找出其中的最小味道濃度值,同時(shí)記錄取得最小味道濃度值時(shí)對(duì)應(yīng)的值(即1,2,3,4中的其中一個(gè)值),并將(X11j,X12j,…,X1kj)作為下次搜索的初始值,隨后重復(fù)上述過程開始進(jìn)行迭代搜索,直到達(dá)到設(shè)定迭代次數(shù)或者尋優(yōu)精度,由此可對(duì)多參數(shù)非線性函數(shù)進(jìn)行優(yōu)化求解。盡管算法在比較尋優(yōu)的過程中,會(huì)存在參數(shù)間互相干擾的問題,但由于算法搜索的隨機(jī)性和廣泛性,該問題不會(huì)影響最終的優(yōu)化結(jié)果。
2.3 仿真分析
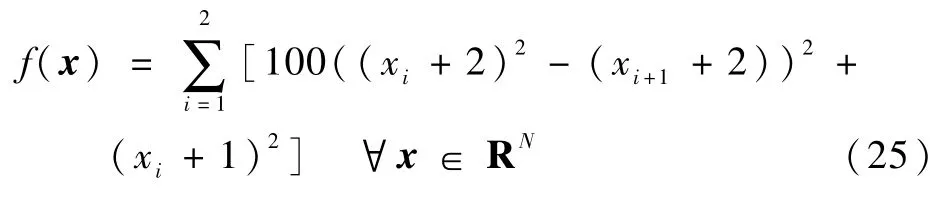
IFOA相比于果蠅優(yōu)化算法具有參數(shù)尋優(yōu)范圍擴(kuò)大及尋優(yōu)精度提升的優(yōu)勢(shì),下面以Rosen brock函數(shù)對(duì)IFOA進(jìn)行測(cè)試。Rosen brock函數(shù)的數(shù)學(xué)形式為

此函數(shù)為典型的非凸函數(shù),主要應(yīng)用于測(cè)試優(yōu)化算法的尋優(yōu)性能。當(dāng)D=3時(shí),此函數(shù)只有一個(gè)最小值,在(x1,x2,x3)=(1,1,1)處取得,因此這里取D=3進(jìn)行算法測(cè)試[30]。
為使該函數(shù)適用于所述算法的對(duì)比分析,對(duì)該函數(shù)的表達(dá)式進(jìn)行適當(dāng)修改,使其在(x1,x2,x3)=(-1,-1,-1)時(shí)取得最小值0。修改后的函數(shù)表示如下:
為更好對(duì)比IFOA的性能,分別對(duì)果蠅優(yōu)化算法、全參數(shù)果蠅優(yōu)化算法及全參數(shù)變步長(zhǎng)果蠅優(yōu)化算法進(jìn)行對(duì)比分析。其中,全參數(shù)果蠅優(yōu)化算法只是對(duì)果蠅優(yōu)化算法改進(jìn)了參數(shù)的尋優(yōu)范圍,僅具有全局參數(shù)(-∞,+∞)搜索的性能,而全參數(shù)變步長(zhǎng)果蠅優(yōu)化算法即是提出的IFOA,具有全局參數(shù)搜索及可變步長(zhǎng)2種性能。在相同的條件下,分別使用上述3種果蠅優(yōu)化算法對(duì)修改后的Rosen brock函數(shù)進(jìn)行尋優(yōu)測(cè)試,得到三者的收斂曲線如圖4所示。
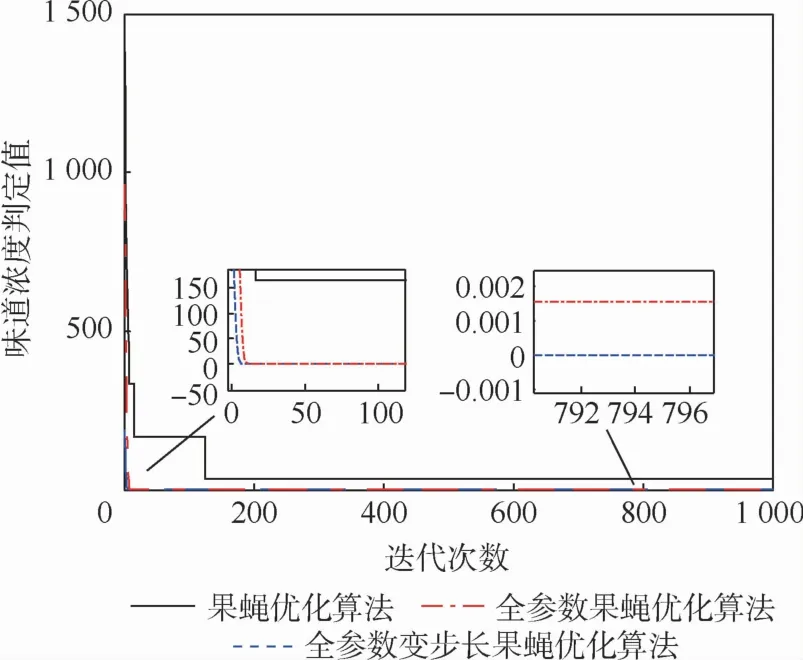
圖4 三種果蠅優(yōu)化算法收斂曲線Fig.4 Convergence curves of three fruit fly optimization algorithms
為定量比較,對(duì)3種果蠅優(yōu)化算法進(jìn)行100次蒙特卡羅仿真,3種算法計(jì)算得到的最優(yōu)值、對(duì)應(yīng)參數(shù)的平均值及最優(yōu)值、對(duì)應(yīng)參數(shù)的均方根誤差分別如表1和表2所示。
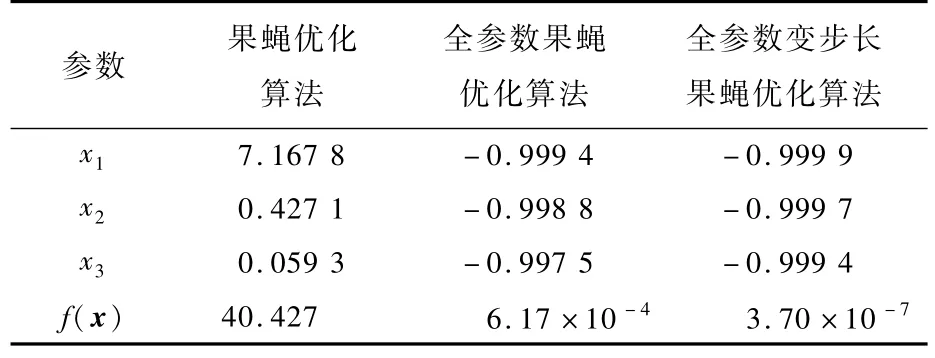
表1 三種果蠅優(yōu)化算法計(jì)算得到的平均值Table 1 Calculated mean of three fruit fly optimization algorithms

表2 三種果蠅優(yōu)化算法計(jì)算得到的均方根誤差Table 2 Calculated root mean square error of three fruit fly optimization algorithm s
由圖4、表1和表2可以看出,在收斂速度方面,定義的全參數(shù)果蠅優(yōu)化算法及全參數(shù)變步長(zhǎng)果蠅優(yōu)化算法具有更快的收斂速度,兩者迭代到第10代之后就可以收斂到理想的精度,而果蠅優(yōu)化算法收斂速度較慢,且優(yōu)化過程中容易受到局部最優(yōu)值的干擾,從而出現(xiàn)階梯狀的優(yōu)化收斂曲線;在優(yōu)化精度方面,由于果蠅優(yōu)化算法參數(shù)無法收斂到-1,無法達(dá)到最優(yōu)值,基本失去優(yōu)化效果。而對(duì)于后2種算法,由于具有全局參數(shù)搜索性能,參數(shù)能夠收斂到接近-1,其最優(yōu)值也能達(dá)到理想精度,具有較好的優(yōu)化效果。特別地,相比于全參數(shù)果蠅優(yōu)化算法,全參數(shù)變步長(zhǎng)果蠅優(yōu)化算法由于又具有可變步長(zhǎng)的性能,其最優(yōu)值的計(jì)算精度提升了3個(gè)數(shù)量級(jí),且參數(shù)值更接近-1,均方根誤差更小。在計(jì)算量方面,由于果蠅優(yōu)化算法的復(fù)雜度主要與種群數(shù)量和迭代次數(shù)有關(guān),而全參數(shù)變步長(zhǎng)果蠅優(yōu)化算法在這2個(gè)參數(shù)方面均未改變,上述對(duì)果蠅優(yōu)化算法的改進(jìn)不會(huì)增加復(fù)雜度。而在實(shí)際測(cè)試中,由于后2種算法用Xi直接替換了作為味道濃度判定值,運(yùn)行時(shí)只需生成Xi的隨機(jī)步長(zhǎng),而無需生成Yi的隨機(jī)步長(zhǎng)并且減少了對(duì)Yi計(jì)算,后2種算法計(jì)算量更小,運(yùn)行時(shí)間更短。果蠅優(yōu)化算法、全參數(shù)果蠅優(yōu)化算法和全參數(shù)變步長(zhǎng)果蠅優(yōu)化算法的平均運(yùn)行時(shí)間分別為0.23 s、0.16 s和0.20 s。
3 基于IFOA的MEMS加速度計(jì)標(biāo)定
為驗(yàn)證IFOA在加速度計(jì)標(biāo)定方面的有效性,模擬了12個(gè)靜態(tài)位置下加速度計(jì)的輸入、輸出數(shù)據(jù),分別運(yùn)用牛頓迭代法、PSO算法及IFOA進(jìn)行仿真,并對(duì)仿真結(jié)果進(jìn)行對(duì)比分析。其中,IFOA的參數(shù)設(shè)置為Δ=1×104,α=0.25,σ=100,n=10,k=9,共有果蠅90個(gè),PSO算法的粒子數(shù)為90,3種算法的優(yōu)化精度均設(shè)置為ε=1×10-10。為避免結(jié)果的偶然性,對(duì)上述3種算法分別進(jìn)行多次仿真實(shí)驗(yàn),并取標(biāo)定成功結(jié)果的平均值進(jìn)行對(duì)比,仿真得到的加速度計(jì)各參數(shù)標(biāo)定結(jié)果及標(biāo)定誤差如表3所示。

表3 三種優(yōu)化算法加速度計(jì)各參數(shù)標(biāo)定結(jié)果及標(biāo)定誤差Table 3 Calibration results and calibration errors of three optimization algorithms for param eters of accelerometer
從表3的標(biāo)定結(jié)果及相應(yīng)標(biāo)定誤差可以看出,在給定求解精度下,牛頓迭代法能夠標(biāo)定出加速度計(jì)的各參數(shù),并且在刻度因子標(biāo)定方面效果較好,但其在安裝誤差及零偏標(biāo)定方面效果一般。而PSO算法與IFOA均作為智能群搜索算法,對(duì)于加速度計(jì)各參數(shù)均具有較好的標(biāo)定效果,標(biāo)定誤差較小,達(dá)到了較理想的水平。相比于牛頓迭代法,兩者在安裝誤差和零偏參數(shù)標(biāo)定方面精確度提升了1~3個(gè)數(shù)量級(jí)。
三種算法進(jìn)行標(biāo)定的平均運(yùn)行時(shí)間及其成功率如表4所示。
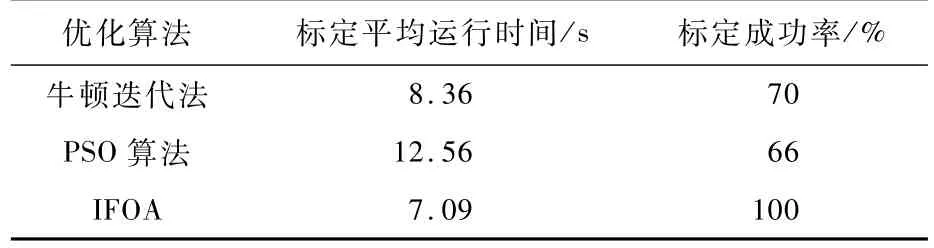
表4 三種優(yōu)化算法標(biāo)定平均運(yùn)行時(shí)間及成功率Table 4 Average calibration time and success rate of three optimization algorithm s
從表4可以看出,在給定求解精度下,牛頓迭代法的平均運(yùn)行時(shí)間為8.36 s,但由于在標(biāo)定過程中牛頓迭代法容易出現(xiàn)矩陣奇異現(xiàn)象,導(dǎo)致優(yōu)化問題無法求解,標(biāo)定成功率為70%,牛頓迭代法應(yīng)用于加速度計(jì)無轉(zhuǎn)臺(tái)標(biāo)定具有一定的局限性。而PSO算法平均運(yùn)行時(shí)間為12.56 s,盡管標(biāo)定過程中不存在矩陣奇異問題,但容易出現(xiàn)早熟收斂的問題,導(dǎo)致標(biāo)定成功率為66%。IFOA平均運(yùn)行時(shí)間為7.09 s,由于在標(biāo)定過程中不存在矩陣奇異及早熟收斂的問題,標(biāo)定成功率為100%。因此,相比于牛頓迭代法和PSO算法,IFOA具有更少的運(yùn)行時(shí)間及穩(wěn)定性。
盡管IFOA在參數(shù)標(biāo)定精確度方面比牛頓迭代法有所提升,在運(yùn)行時(shí)間方面比PSO算法有所提高,但其參數(shù)標(biāo)定精確度與PSO算法相比沒有明顯提高,運(yùn)行時(shí)間與牛頓迭代法相比也沒有明顯縮短,主要是因?yàn)樗惴▋H設(shè)置了單一的搜索半徑。這個(gè)算法局限性導(dǎo)致不同數(shù)量級(jí)的待標(biāo)定參數(shù),在搜索初期需要較長(zhǎng)的時(shí)間才能收斂到各自的真值附近,同時(shí)這也導(dǎo)致不同參數(shù)在各自真值附近的波動(dòng)范圍較大,難以進(jìn)一步提高標(biāo)定精確度。在下一步的研究中,可以考慮在算法中針對(duì)不同數(shù)量級(jí)的待標(biāo)定參數(shù),設(shè)置不同數(shù)量級(jí)的搜索半徑,從而使標(biāo)定參數(shù)能夠迅速收斂到真值附近,同時(shí)也能夠?qū)?shù)收斂的波動(dòng)范圍進(jìn)行一定限制,提高標(biāo)定精確度。
4 結(jié)論
1)提出的IFOA相比于果蠅優(yōu)化算法具有參數(shù)搜索范圍廣、收斂速度快、優(yōu)化精度高、運(yùn)行時(shí)間短的性能優(yōu)勢(shì)。
2)對(duì)加速度計(jì)標(biāo)定的仿真結(jié)果顯示,IFOA相比于牛頓迭代法在求解精度方面提高了1~3個(gè)數(shù)量級(jí);由于不存在矩陣奇異及早熟收斂的問題,IFOA在運(yùn)行穩(wěn)定性方面比牛頓迭代法和PSO算法分別提高了30%和34%,在運(yùn)行時(shí)間方面分別減小了15.2%和43.6%。對(duì)于算法存在的局限性,在后續(xù)的研究中可以考慮設(shè)計(jì)多搜索半徑算法,對(duì)不同標(biāo)定參數(shù)設(shè)置不同搜索半徑,從而進(jìn)一步提高IFOA的標(biāo)定精確度并縮短運(yùn)行時(shí)間。
3)提出的基于IFOA的MEMS加速度計(jì)無轉(zhuǎn)臺(tái)標(biāo)定方法具有精度高、穩(wěn)定性好、解算時(shí)間短的優(yōu)點(diǎn),且無需依賴高精度轉(zhuǎn)臺(tái),適用范圍廣、成本低,在消費(fèi)級(jí)MEMS加速度計(jì)簡(jiǎn)易標(biāo)定方面具有良好的應(yīng)用價(jià)值。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45