基于三維激光掃描技術的軌道梁線形檢測方法研究
2021-11-18 03:50:04張銀虎
鐵道勘察 2021年5期
張銀虎 李 旭 王 磊
(1.中鐵工程設計咨詢集團有限公司,北京 100055;2.上海三點測繪公司,上海 200331)
1 概述
在跨座式單軌交通工程中,軌道梁既是承重構件,又是引導單軌列車運行的軌道[1-2]。作為單軌列車的運行基礎,架設完成后的軌道梁應連接成連續、平直、圓順的線路[3-4],以確保列車的安全平穩運行。依據相關技術規范以及軌道梁設計要求,軌道梁架設完成后及試運行期間,需對成橋后的軌道梁進行線形檢測和分析評價[4]。現有的軌道梁線形檢測方法主要采用水準儀、全站儀、水平尺、檢測尺等常規測量設備,在作業效率、測量精度及檢測全面性等方面存在不足。
三維激光掃描技術作為一種集成多種高新測繪技術于一體的新型綜合測量技術,具有測量速度快、指向精度高、點云空間密度大等特點[5]。相較于傳統的測量技術手段,三維激光掃描技術采用非接觸掃描目標的方式進行測量,能夠快速、連續、自動地采集物體表面的三維數據信息(點云數據)[6],已廣泛應用于市政工程測量、文物保護、隧道結構檢測等工程中。張立偉等采用三維激光掃描技術進行古建筑三維數據采集及立面圖制作[7];臧偉等基于三維激光掃描技術在道路測量、三維建模等進行探索[8];汪玉華等采用三維激光掃描技術,對盾構管片模具檢測中的關鍵技術進行研究[9-10]。
對于跨座式單軌交通工程,文強等提出一種基于圖像處理的單軌交通PC 軌道梁邊緣檢測方法[11];李小果等展開軌道梁生產和驗收測量方法研究[12];魏德豪等進行基于CCD 圖像分析的空軌軌道梁表面缺陷檢測技術探索[13]。結合跨座式單軌交通工程軌道梁設計和施工特點,提出一種基于三維激光掃描技術的軌道梁橋線形檢測方法,主要技術路線如下。
(1)基于既有軌道梁基礎控制網,利用智能型全站儀采用自由測站邊角交會測量的方法建立軌道梁線形檢測控制網[14]。
(2)采用Trimble SX10 高精度三維激光掃描儀,利用軌道梁線形檢測控制網進行邊角交會自由設站,對成橋后的軌道梁進行三維掃描,獲取軌道梁的三維點云數據。
(3)采用研發的跨座式單軌交通軌道梁檢測分析軟件,計算軌道梁檢測斷面及檢測點的三維坐標,并結合軌道梁線形設計參數,對軌道梁走行面、導向面、穩定面線形進行檢測分析與評價。
2 線形檢測控制網測量
軌道梁線形檢測作業前,需布設線形檢測控制網,以滿足對軌道梁進行三維點云數據采集的需要。
2.1 控制網布設
線形檢測控制網包括線下線形檢測控制網和線上線形檢測控制網,線下線形檢測控制網采用既有軌道梁基礎控制網[15],線上線形檢測控制網需利用既有軌道梁基礎控制網進行加密測量。
線上線形檢測控制點一般布設在軌道梁頂面,每1~2 片梁布設1 點,并在現場設置“+”字點位標記及標注點號。
2.2 控制網測量
線上線形檢測控制網以既有軌道梁基礎控制網為起算,采用智能型全站儀配合專業數據采集軟件進行測量。
在線形檢測控制點上架設專用精密測量基座及測量棱鏡,如圖1 所示。在線下架設全站儀,以軌道梁基礎控制網為起算,采用自由設站后方交會的方法進行全站儀設站,觀測控制點不少于4 個。

圖1 專用精密測量基座及棱鏡
全站儀設站完成后,采用多測回邊角測量法或極坐標法進行線形檢測控制點平面測量,采用精密三角高程測量法進行線形檢測控制點高程測量。
為保證線形檢測控制點測量精度,每次自由設站應觀測不少于4 個線形檢測控制點,相鄰設站間應搭接2 個線形檢測控制點進行精度檢核,重復測量坐標及高程較差應≤±2 mm。
3 軌道梁三維點云數據采集
基于軌道梁基礎控制網和線上線形檢測控制網,采用Trimble SX10 高精度三維激光掃描儀,進行邊角交會自由設站,分別對成橋后軌道梁的頂面及內外兩側面進行三維掃描,以獲取軌道梁的三維點云數據。
Trimble SX10 三維激光掃描儀是一款全站型三維激光掃描儀,集測量、攝像和高速三維掃描于一體,可以獲取高精度的三維點云數據,主要技術參數如表1 所示。
3.1 掃描儀自由設站
Trimble SX10 掃描儀自由設站采用機載定向軟件,通過觀測4 個以上的軌道梁基礎控制點或線上線形檢測控制點,依據控制點坐標和邊角觀測數據,可后方交會并計算出掃描儀置鏡點坐標,再進行掃描儀定向。
掃描儀自由設站精度執行表2 的要求,設站完成后,應對控制點坐標進行檢核,不符值執行表3 的要求。

表2 掃描儀自由設站精度要求 mm

表3 掃描儀自由設站控制點坐標不符值要求
3.2 軌道梁三維點云數據采集
在線下架設掃描儀,利用線下軌道梁基礎控制網進行自由設站,對軌道梁外側面進行掃描作業,每站宜掃描1~2 片梁。在線上疏散平臺架設掃描儀(需配置專用測量三角架),利用線上線形檢測控制網自由設站,對軌道梁頂面及內側面進行掃描作業,每站宜掃描1~2 片梁。軌道梁三維掃描作業如圖2 所示。
軌道梁三維激光掃描作業時,同時采集軌道梁全景影像數據,以便于對三維點云進行賦色和后續計算分析,如圖3 所示。
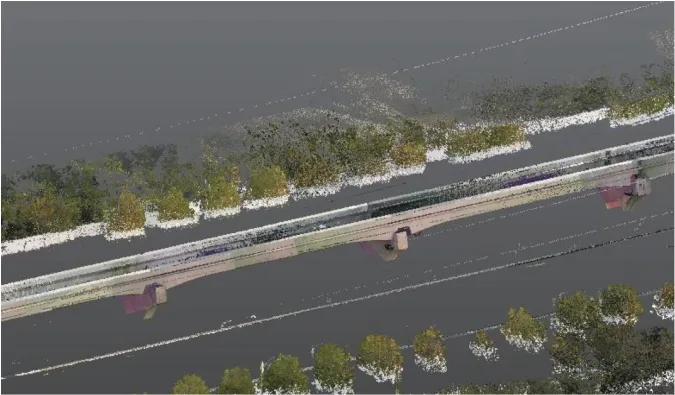
圖3 軌道梁三維點云數據
4 軌道梁檢測點坐標計算
獲取軌道梁的高密度三維點云數據后,需首先進行檢測斷面提取和檢測點坐標計算等數據處理工作,以滿足后續軌道梁各檢測參數計算和線形分析的需要。
結合軌道梁結構設計參數、軌道梁檢測內容和精度要求,以及軌道梁檢測斷面、檢測點的布設原則,提出基于隨機抽樣一致性(random sample consensus,RANSAC)算法的軌道梁檢測斷面提取和檢測點坐標計算方法[16],主要包括三維點云預處理、點云精處理、軌道梁斷面中心點坐標計算與導入、斷面提取與檢測點坐標計算、檢測點成果輸出等技術流程,如圖4 所示。
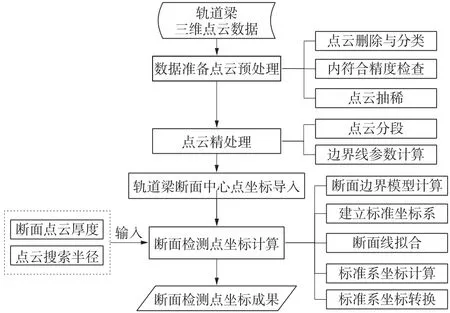
圖4 基于RANSAC 算法的檢測點坐標計算流程
4.1 點云數據預處理
軌道梁三維點云數據既包含軌道梁數據,還包含接觸軌、緊急疏散通道、墩柱、樹木等其他點云數據。為提高數據處理精度和效率,需要對點云數據進行預處理。
(1)點云數據刪除與分類
點云數據剔除是指剔除軌道梁之外的其他點云數據。點云數據分類是指使用 TRW (Trimble RealWorks)軟件的點云自動分類功能對原始點云數據進行分類,以提高點云剔除的工作效率。
(2)點云數據內符合性精度檢查
作業時,通過對不同測站的點云賦不同顏色,量取不同測站獲取的同一位置點云在走行面上的豎向距離或在側面上的橫向距離差,并對點云數據的內符合精度進行分析判斷。
(3)點云數據抽稀
由于測站附近的點云數據密度較其他地方稍高,為提高點云數據計算效率,需要對點云數據進行抽稀。
(4)點云數據輸出
點云數據預處理完成之后,輸出*.asc 格式的點云數據,用于后續的軌道梁檢測斷面提取及檢測點坐標計算工作。
預處理后的軌道梁三維點云數據如圖5 所示。
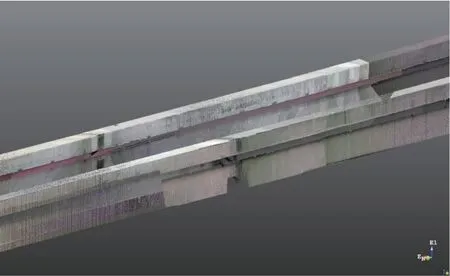
圖5 預處理后的軌道梁三維點云數據
4.2 點云數據精處理
對于預處理后的軌道梁點云數據,需結合軌道梁檢測斷面和檢測點布設原則進行點云分段和邊界參數計算等精處理。
(1)點云分段
為了提高處理點云的效率,根據輸入點云的長度,將點云等間距劃分成多個段落并保存到相應的*.BYT 文件中。
(2)邊界線參數計算
利用RANSAC 算法,對分段后的每一段點云進行邊界線參數計算,求解邊界線方程。邊界線方程求解方法有兩種:①通過求解Z坐標均值截取斷面點計算邊界線方程;②通過求解梁前后面任一面方程(降維為線方程)。
4.3 檢測點坐標計算
依據分段后的軌道梁三維點云數據以及檢測斷面中心點設計里程或設計坐標,進行軌道梁檢測點坐標計算。
(1)軌道梁檢測點布設原則
軌道梁檢測點沿線路走向按斷面進行布設,每個檢測斷面布設7 個檢測點,軌道梁頂面布設3 個點及內外側面分別布設2 個點,即中線點以及車輪與軌道梁的接觸點,如圖6 所示。
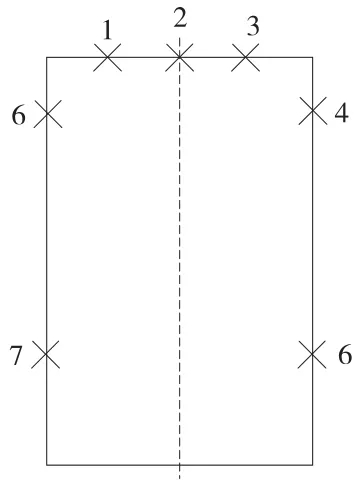
圖6 軌道梁線形檢測斷面中檢測點布設
(2)檢測斷面邊界模型計算
根據斷面中心點坐標及斷面厚度值,采用RANSAC 算法進行中心點附近的邊界線方程計算,獲得更貼近中心點的邊界線模型。
根據斷面邊界線模型,按照輸入的斷面點云厚度值,提取斷面點云,并將點云分成上面、前面和后面點。
(3)建立標準坐標系
采用RANSAC 算法,進行檢測斷面點云上面、前面、后面點的平面模型擬合。計算時重復1 000 次抽取點云中3 個點,計算其對應的平面方程及平面包含點數,選取包含最多點的面為計算平面。
定義斷面中心點為原點,定義前后方向X軸、行進方向為Y軸、天頂方向為Z軸,建立標準坐標系。
(4)斷面線擬合
根據提取的斷面點,采用含粗差探測的最小二乘法進行斷面上邊界線、前邊界線及后邊界線的擬合計算,如圖7 所示。

圖7 斷面線擬合計算
(5)檢測點坐標計算與坐標轉換
按照圖6 中斷面檢測點的布點間距,擬合計算檢測點在斷面線上的坐標和高程數據,如圖8 所示。
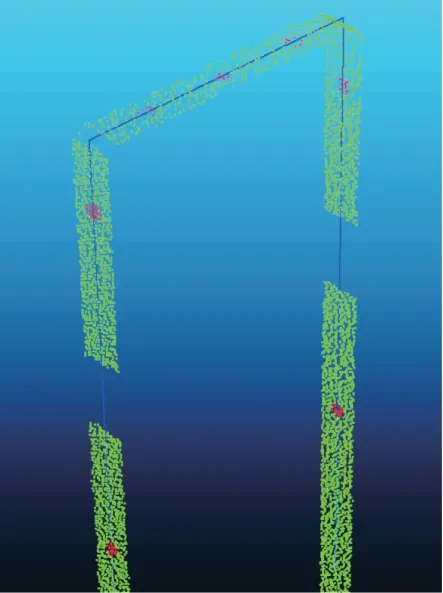
圖8 檢測點坐標計算(紅色為計算采用點云)
根據標準坐標系與測量坐標系的相對關系,將檢測點的坐標轉換為測量坐標系坐標,并采用按斷面和按點屬性兩種方式輸出檢測點坐標成果文件。
5 軌道梁線形分析
利用軌道梁各個檢測斷面上7 個檢測點的坐標和高程數據,并結合軌道梁設計參數,采用研發的“跨座式單軌交通軌道梁檢測分析軟件(STMB_DAS)”,對軌道梁線形進行檢測分析。
軌道梁線形分析內容一般包括線路中線偏差、高程偏差、線間距、工作面線形、工作面縱向平整度、平面線形矢高、豎向線形矢高、軌道梁側面距離中心的偏差、梁端軌面橫坡、走行面垂直度等內容。
(1)設計數據輸入
在計算檢測點各項偏差前,需要先后輸入線路平曲線設計文件、豎曲線設計文件、軌道梁設計參數(變形上供值)等。
(2)檢測參數設置與線形分析
檢測分析前,需進行軌道梁參數及限差設置,如圖9 所示。結合軌道梁設計參數以及檢測點坐標和高程數據,對軌道梁線形進行處理分析,輸出線形檢測分析成果文件。
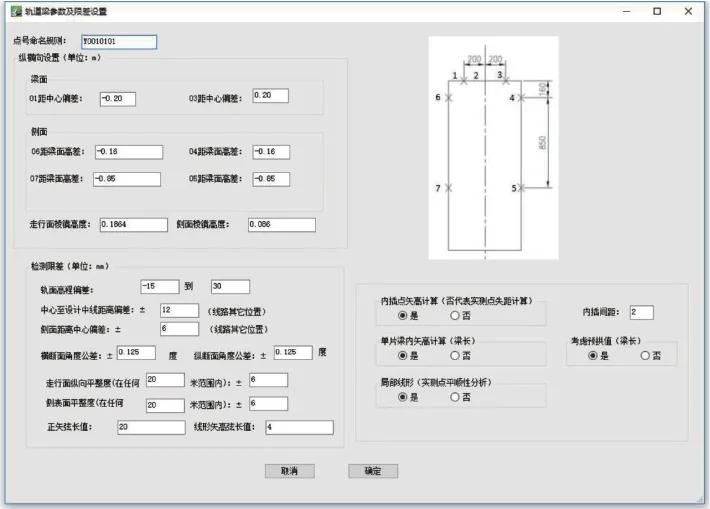
圖9 軌道梁線形檢測參數設置
6 應用案例
選擇蕪湖軌道交通1 號線文津東路—珩瑯山路站區間DK26+979~DK27+115 段,開展基于三維激光掃描技術的軌道梁線形檢測方法應用測試。
(1)線路概況
本區段線路近似南北走向,長136 m,全部為高架橋梁。試驗段共包括10 榀軌道梁,均為簡支PC 軌道梁,如圖10 所示。其中,Z222-59、Z222-60 及Y222-59、Y222-60 均為曲線梁,且包含半徑3 000 m 的凹豎曲線。
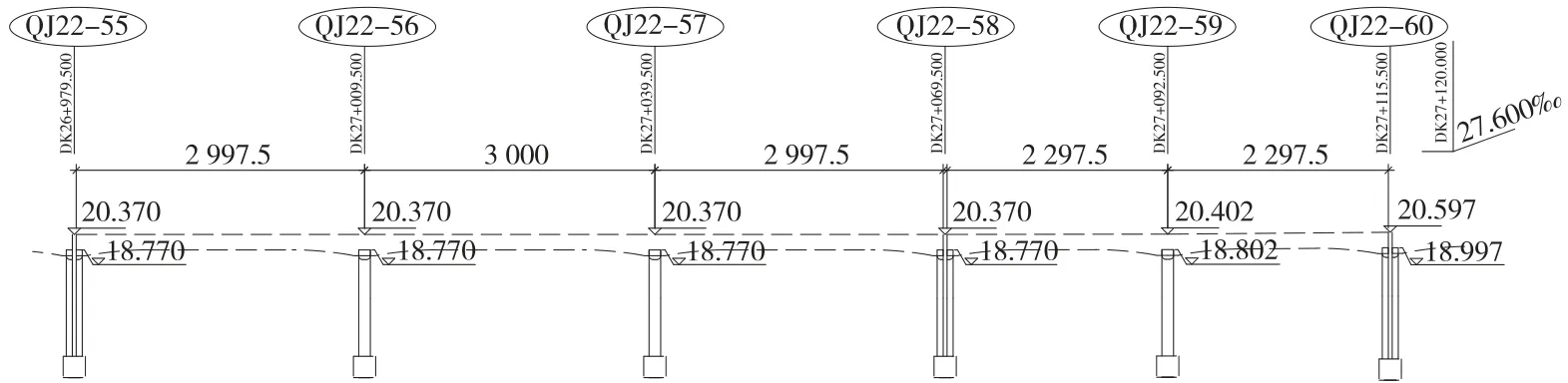
圖10 DK26+979~DK27+115 段軌道梁立面(高程單位:m;其余:mm)
本段軌道梁架設及調整工作已基本完成,正在開展后續車站工程施工、維修通道及疏散平臺安裝工作。
(2)軌道梁線形檢測作業
分別采用常規全站儀法和三維激光掃描方法進行軌道梁線形檢測。
常規全站儀法軌道梁線形檢測采用Leica TS60 智能型全站儀,其測角精度為0.5″,測距精度為0.6 mm+1×10-6D。利用線上線形檢測控制網,進行全站儀自由設站,然后采用坐標法對每個檢測斷面進行測量,進而對軌道梁線形進行檢測分析。由于左右梁間需安裝維修通道和疏散平臺,軌道梁外側無輔助作業平臺,且軌道梁內側需安裝接觸軌,故常規全站儀法只能進行軌道梁走行面(頂面)的線形檢測。
軌道梁三維點云數據采集采用Trimble SX10 高精度三維激光掃描儀,其測量精度如表1 所示。采用線下掃描軌道梁外側面、線上掃描軌道梁頂面及內側面的作業方案。
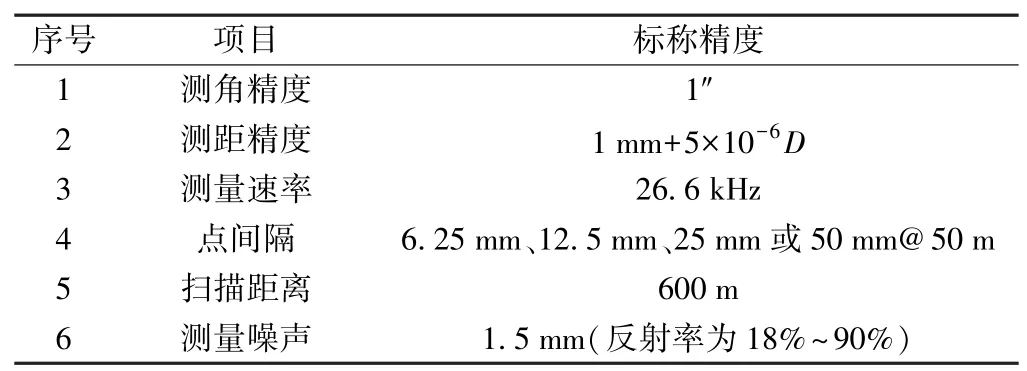
表1 Trimble SX10 三維激光掃描儀技術參數
采用“跨座式單軌交通軌道梁檢測分析軟件(STMB_DAS)”進行軌道梁三維點云數據處理、檢測點坐標計算,并結合軌道梁設計參數進行軌道梁線形分析。
(3)檢測數據對比分析
本段右線軌道梁共布設103 個檢測斷面、309 個檢測點,左線軌道梁共布設66 個檢測斷面、198 個檢測點。
對基于三維掃描技術的軌道梁線形檢測方法與常規全站儀方法進行中線偏差、高程偏差以及軌道梁平面、高程線形檢測數據對比分析,結果如表4~表6 及圖11~圖14 所示。
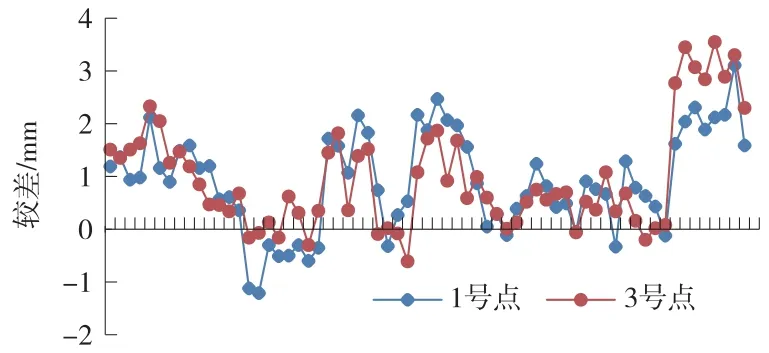
圖14 左線軌道梁走行面縱向平整度(20 m 弦)檢測較差統計
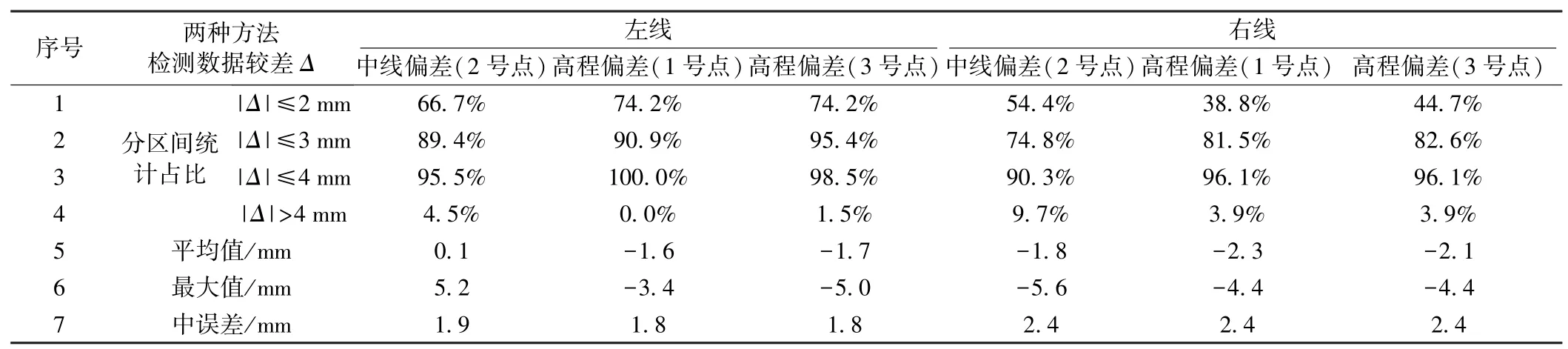
表4 三維掃描方法與常規方法檢測數據較差統計(絕對位置偏差)
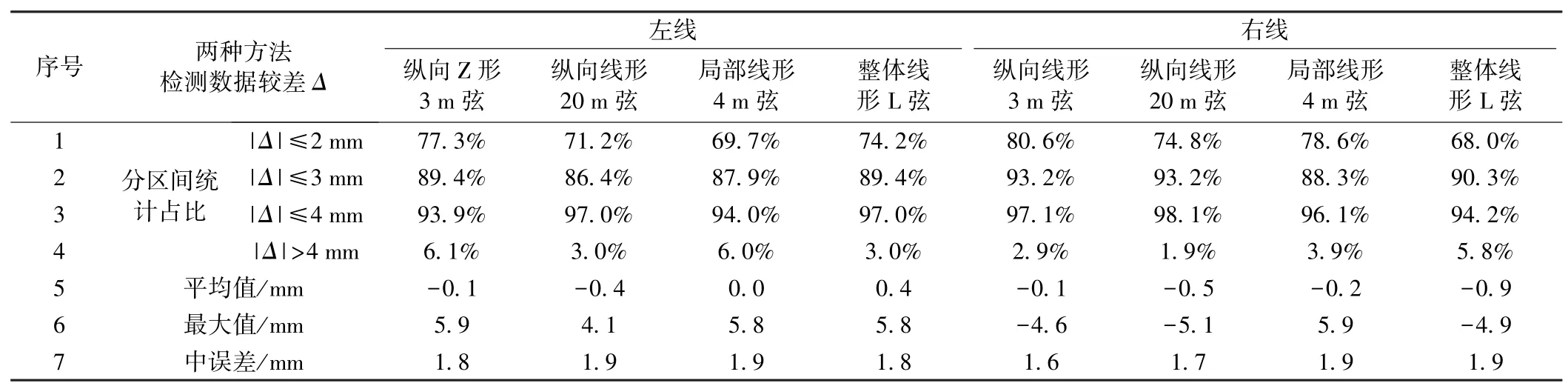
表5 三維掃描方法與常規方法檢測數據較差統計(平面線形)

表6 三維掃描方法與常規方法檢測數據較差統計(豎向線形)

圖11 左線軌道梁中線偏差檢測較差統計
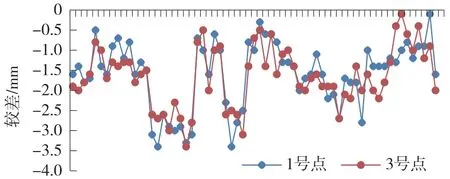
圖12 左線軌道梁高程偏差檢測較差統計
基于三維掃描技術的軌道梁線形檢測方法與常規全站儀方法對比分析統計結果如下。
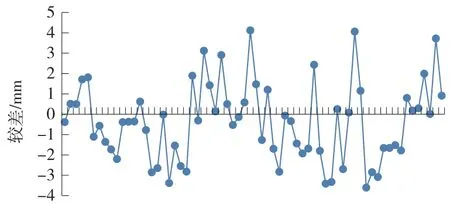
圖13 左線軌道梁縱向線形(20 m 弦)檢測較差統計
①兩種方法左右線軌道梁中線偏差較差的平均值分別為0.1 mm、-1.8 mm,計算三維掃描方法軌道梁中線檢測中誤差為1.9 mm(左線)、2.4 mm(右線)。
②兩種方法左右線高程偏差較差的平均值均≤±2.3 mm,三維掃描方法軌道梁高程檢測中誤差為1.8 mm(左線)、2.4 mm(右線)。
③兩種方法左右線軌道梁平面線形檢測較差的平均值均≤±0.9 mm,計算三維掃描方法各項平面線形檢測中誤差均≤1.9 mm。
④兩種方法左右線豎向(高程)線形檢測較差平均值均≤1.1 mm,三維掃描方法各項豎向(高程)檢測中誤差均≤1.5 mm。
通過對檢測數據的統計分析,采用三維掃描技術的軌道梁線形檢測方法,其平面、高程絕對位置檢測精度及軌道梁線形檢測精度均能夠滿足《跨座試單軌交通施工及驗收規范》及《城市軌道交通工程測量規范》中“測量誤差≤1/2 允許偏差”的技術要求。
7 結語
結合國內跨座式單軌交通工程建設需求,針對常規檢測方法存在的作業效率低、測量精度差、數據全面性不足等問題。為提高單軌工程軌道梁的線形平順性,提出一種基于三維激光掃描技術的軌道梁線形檢測方法。通過實際工程應用測試,軌道梁中線、高程偏差以及平面、高程(豎向)線形檢測精度均能夠符合相關技術規范要求。三維激光掃描技術具有測量速度快、指向精度高、點云空間密度大的特點,相較于常規檢測方法,基于三維激光掃描技術的軌道梁線形檢測方法具有儀器設備和作業人員投入少、作業效率高、檢測數據全面、非接觸測量作業模式安全性高等明顯的技術和經濟優勢。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
