倉儲機器人電池儲能系統設計與仿真
2021-11-20 15:16:32劉正春楊煒紅舒國明
電源技術 2021年9期
關鍵詞:模型
劉正春,李 杰,楊煒紅,舒國明,王 俊
(1.陸軍工程大學,河北石家莊 050003;2.河北交通職業技術學院,河北 石家莊 050003)
目前大多倉儲機器人都采用電池儲能系統供電,而隨著倉儲機器人應用越來越廣泛,其設計也越來越向靈活性、便捷性和輕量化發展。倉儲機器人在搬運貨物過程中消耗的大量能量都來源于電池儲能系統[1-2],因此,電池系統的供電性能、質量、體積直接影響到整個機器人的設計。機器人常用的電池類型主要有鉛酸電池和鋰電池。鋰離子電池具有質量輕、儲能大、無污染、無記憶效應、使用壽命長等突出優點。當前市面上機器人設計使用率最高的鋰電池主要有磷酸鐵鋰電池[2-3],其具有更高的安全性、更長的使用壽命、不含任何重金屬和稀有金屬(原材料成本低)、支持快速充電、工作溫度范圍廣、綠色環保[2-5]的優點,但也存在一些缺陷。三元鋰電池是指使用鎳鈷錳作為正極材料,石墨作為負極材料的鋰電池,其電壓平臺高,比能量、比功率大。此外,在大倍率充電和耐低溫性能等方面,三元鋰電池也有很大的優勢[6]。
本文針對某型倉儲機器人的特定性能要求,采用N21700CB-50 型三元鋰電芯對機器人電池系統進行設計。基于室內室外工作的特殊需求,將電池系統設計為2 個獨立可分離的電池模塊,同時構造三元鋰電芯的二階RC 電路等效模型和數學模型,基于實測數據對模型參數進行辨識,并進一步建立機器人的電池組、負荷(主要關節電機)以及整個源載系統的Matlab/Simulink 仿真模型。模型仿真在對電池系統設計可行性進行驗證的基礎上,還討論了不同環境溫度對電池系統動態特性的影響。
1 結構設計
1.1 設計依據
要求該倉儲機器人手臂最大抓取質量為2 kg,設計其機械臂為6個自由度,臂身自重為15 kg,各關節電機選型及參數如表1所示,各電機額定電壓均為24 V。電機啟動瞬時電流為額定電流的2~3倍,故其瞬時功率也應為其平均功率的2~3倍[7-10]。

表1 倉儲機器人機械臂電機參數表
通過計算分析,得出該型倉儲機器人儲能電池的工作性能要求為:輸出電壓Udc=24 V,平均功率Pave≥231.5 W (Iave≥9.65 A),瞬時功率Pmax≥463 W (Imax≥19.3 A);在室內工作時,工作時間tw≥4 h(電池能量Ez≥926 Wh),充電時間tc≤1 h,在室外工作時,工作時間tw≥2 h(電池能量Ez≥463 Wh),充電時間tc≤0.5 h;工作環境溫度為-20~45 ℃(考慮室外作業)。
依據上述性能需求,電池采用模塊化設計,設計為2 組獨立、結構相同的電池組:室內工作時,采用2 組電池組并聯;室外工作時,只需用1 組即可。
1.2 電池模塊設計
考慮室外環境溫度(-20~45 ℃)對電池特性的影響較大,并且為了降低機器人電源質量,本文選用目前市場最新的、能量密度更高的N21700CB-50 型三元鋰電池,其標稱電壓U0為3.6 V,充放電電壓范圍為2.5~4.2 V,典型容量Q0為5 000 mAh@0.2C,最大充電電流為3C(25 ℃),最大放電電流為1C(25 ℃)。基于此,設計電池組,使其滿足1.1 節中的電源性能要求。
通過電芯串聯,滿足機器人電機電壓要求,得到電芯串聯個數:

通過電芯并聯,滿足機器人功率和能量要求,得到電芯總并聯數:

取Npz=10,鑒于機器人的應用場合不同,采用模塊化設計,將該電池組設計成2 個結構相同、獨立分離的電池模塊,每個電池模塊的并聯數為:

得到每個電池模塊7 串5 并的設計結構,電池組為2 個可分離的獨立電池模塊并聯組成,電池模塊和電池組的設計參數如表2 所示。

表2 電池組設計參數
該電源系統輸出電壓范圍滿足電機24 V 直流電壓要求;在機器人機械臂運動過程,即各電機全功率運行過程中,輸出平均電流Iave=10.5 A@0.21C,平均功率下可持續運行4.76 h;采用50 A@1C電流充電,1 h 即可充滿;在室外作業,可只攜帶1 塊2.38 kg 的電池模塊,可在全功率運行狀態下,持續運行2.38 h;采用50 A@2C電流充電,0.5 h 即可充滿。因此,該電源系統可以滿足該倉儲機器人電源的性能要求。
2 模型建立
2.1 電池組建模
目前常見的電池等效電路模型由簡單到復雜主要有理想電池模型、Rint 模型、Thevenin 模型(單階和二階)、PNGV 模型等。本文選用RC 網絡與Thevenin 相結合的二階RC 電路模型[2-5],如圖1 所示。該模型同時兼顧了電池特性的動態精度和參數的簡單易辨識度。
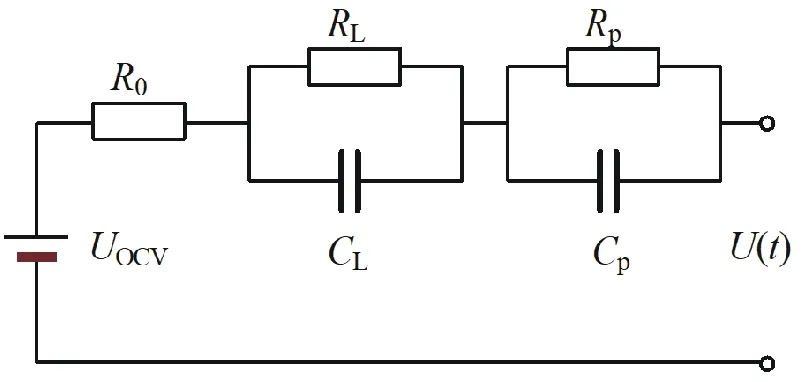
圖1 電池組二階RC 等效電路模型
圖1 中,UOCV為開路電壓,與剩余電量SOC(t)有關[5],R0為歐姆內阻,RL和Rp為極化內阻,CL和Cp為極化電容,這兩個RC 網絡可較好地模擬電池電流電壓的運行細節。其狀態空間表達方程式為:

式中:Ts為采樣時間;SOC(0)為SOC的初始時刻值;UL和Up分別是RL和Rp的端電壓;Qrat為電池額定容量;η是庫侖效率,可通過充放電實驗獲得。該模型中需要辨識的參數有:UOCV、RL、Rp、CL和Cp,可通過對本文選取的N21700CB-50 型三元鋰電芯實測實驗來獲取,如表3 所示。
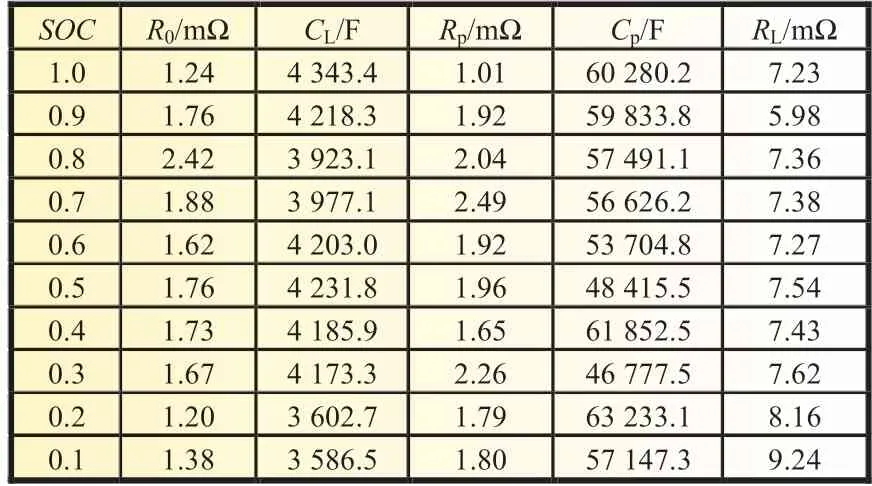
表3 N21700CB-50 型三元鋰電芯實測辨識參數表
表3 將作為電池組Matlab/Simulink 仿真模型電芯單元模塊的查表參數。電池容量隨環境溫度發生變化,通過實測實驗,獲取N21700CB-50 電芯SOC(標幺值pu 為1)與環境溫度之間的數據對應關系,如圖2 所示,10~40 ℃為該電芯的最佳工作溫度段,當溫度低于10 ℃時,電池SOC大幅下降;而當溫度高于40 ℃時,電池SOC增大,但此時對電池壽命不利,電池性能將受到影響。

圖2 電芯SOC與環境溫度的數據對應關系
2.2 電動機建模
機器人用小型電動機常采用直接啟動方式。該方式所需設備簡單、啟動時間短、簡單可靠、成本低,但電動機在啟動瞬間會產生比額定電流大2~3 倍的沖擊電流,并且作用時間在1~10 s[7,9-10]。
電動機的動態特性與機械特性密切相關,可用轉子運動方程和電磁轉矩方程表示,如式(5)所示,電壓方程如式(6)所示,負載轉矩TL與電動機消耗有功功率P、轉速n的對應關系如式(7)所示[9]。
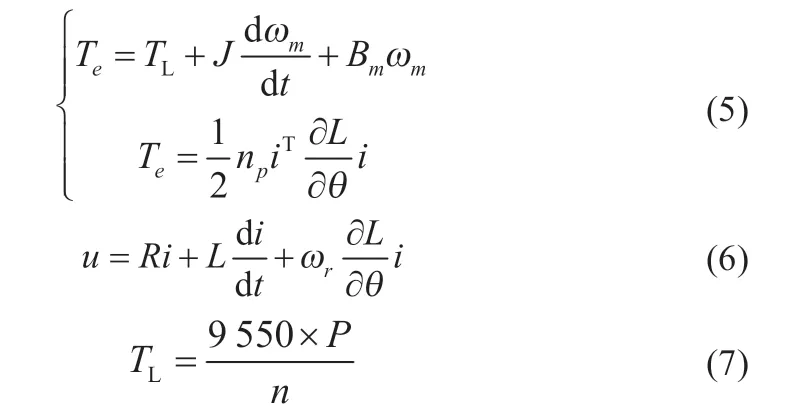
式中:Te、TL分別為電磁轉矩和負載轉矩;J為軸系轉動慣量;Bm為阻尼轉矩系數;ωm為轉子機械角速度;θ為轉子軸線與定子軸線的夾角;L為感應電機各相等效電感;np為電機極對數,電角速度ωr=npωm;i為定子和轉子三相電流;u為定子和轉子三相電壓;R為繞組電阻。
3 模型仿真
3.1 電池組仿真模型
建立單個電芯Simulink 仿真模型子模塊,如圖3 所示,包括主電路單元和測量單元。測量內容包括電芯的輸出電壓U0(t)、電流i0(t)和剩余電量SOC(t)。
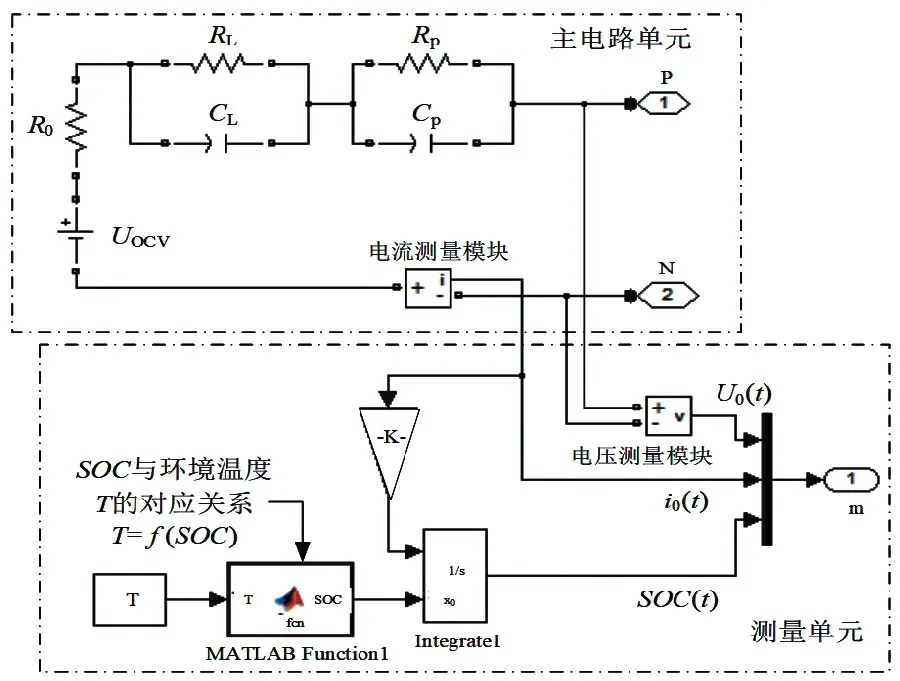
圖3 單個電芯Simulink仿真模型
基于表3 的實測辨識參數,其中UOCV、R0、RL、Rp、CL和Cp都隨著SOC值的不同查表產生,辨識參數寫在Mask 函數里。SOC值采用安時積分法來實現,其公式為:

式中:i0(t)為電芯瞬時電流。其中,SOC(0)與溫度的關系見圖2,用fcn 函數模塊實現數據查找。通過7 串5 并組合方式將電芯子模塊搭建為1 個電池模塊;2 個電池模塊并聯為1 個電池組(4 h 室內),或單獨使用(2 h 室外)。
3.2 系統仿真模型
將電源模型與電動機負載模型相連,構成整個機器人供電系統源載模型。其中電動機模型由多個不同功率的直流電機并聯構成,分別模擬表1 中6 個不同部位的功能電機。本文通過監測電池組輸出電壓uBattery和輸出電流iBattery這兩個參量的瞬時波形來討論三元鋰電池組在不同環境溫度下的動態特性。
4 試驗驗證
基于機器人供電系統源載互聯仿真模型,設置電源初始SOC(0)=100%,電芯電壓U0=4.2 V(SOC=100%狀態下),初始容量Q0=50 Ah;仿真模擬機器人運動時6 個不同部位功能電機的啟動過程(此時瞬時功率最大)。
動態仿真過程設置:0 s 時,開機啟動,此時有部分阻感負載產生少量電流;2 s時,肩部關節旋轉和俯仰電機(Pave=154 W)同時啟動;2.5 s 時,肘部關節俯仰電機(Pave=60 W)啟動;3 s 時,腕部關節旋轉、俯仰和偏航3臺電機(Pave=17.5 W)同時啟動。
設置不同環境溫度-20、0、15、25、30、45 ℃,分別獲取電池組輸出電流iBattery、輸出電壓uBattery和SOC的瞬態波形,如圖4~5 所示。
由圖4 可知,機器人運動時,電機啟動瞬間產生的電流比平均電流大2~3 倍。3 次電機啟動產生的尖峰脈沖電流最大(45 ℃時)分別為24.3、30.1、18.7 A,放電倍率分別為0.49C、0.60C、0.37C,均小于1C,電池組完全可以滿足系統瞬時功率的要求。
此外,環境溫度對電池系統性能的影響比較大,但在實際工作中,當環境溫度低于0 ℃時,電池性能下降,放電能力會相應降低。由圖4 可知,三元鋰電池雖然電流釋放能力有所降低,但仍然可滿足電動機啟動電流要求(額定電流的2~3倍)。
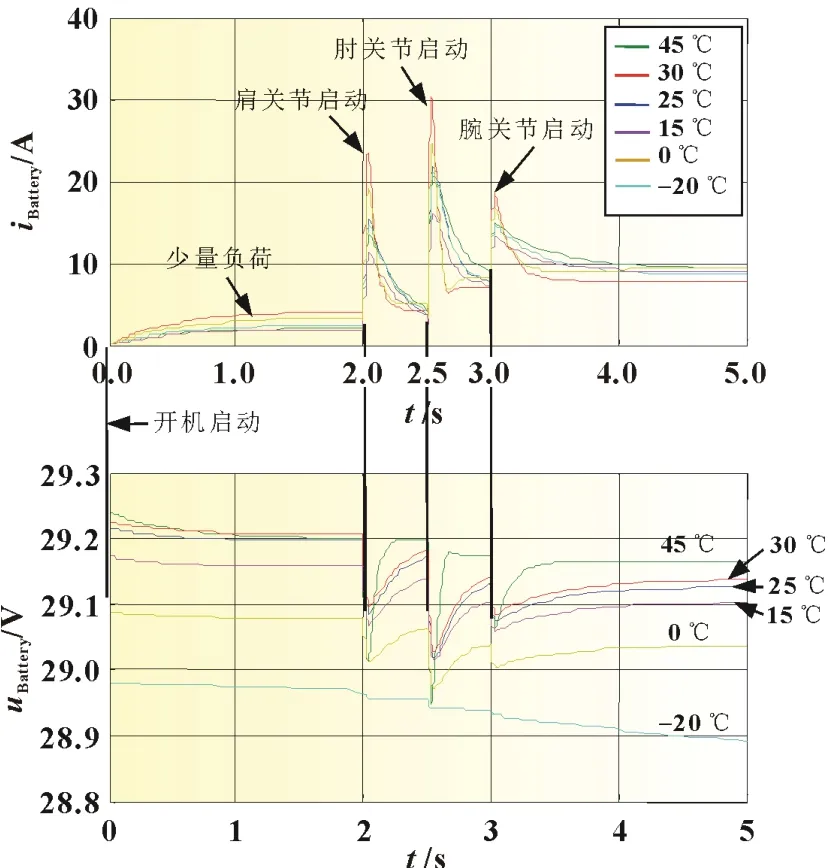
圖4 不同環境溫度下電池組電壓電流動態波形
由圖4 可知,輸出電壓uBattery隨著環境溫度的降低而下降,隨著環境溫度的升高而升高;環境溫度較高時,電池電壓響應特性較好,電壓動態恢復時間較短;環境溫度越高,電池輸出電流iBattery的動態特性就越好,其波形響應速度快,瞬時電流高,即體現出更強的電流釋放能力。
由圖5 可知,環境溫度越高,電池容量越大,SOC斜率越小,即剩余容量下降趨勢越緩慢。雖然初始SOC(0)均設置為100%,但實際上,環境溫度對電池剩余容量的影響較大,-20 ℃時,實際SOC只有62%,而當25 ℃時,實際SOC會略大于100%。

圖5 不同環境溫度下電池組SOC動態波形
5 結語
本文考慮環境溫度對倉儲機器人室外作業的影響以及機器人輕量化設計需求,采用三元鋰電池構建某型倉儲機器人電源系統。通過建立電池組二階RC 等效電路數學模型和仿真模型,對方案的可行性和環境溫度適應性進行了驗證,并討論了環境溫度對三元鋰電池輸出瞬態特性的影響。仿真結果表明,設計方案完全可以滿足系統瞬時功率的要求,且低溫下三元鋰電池的放電能力也可以滿足倉儲機器人室外作業的要求。雖然三元鋰電池具有較高的能量密度和瞬時大電流釋放能力,但三元鋰電芯在使用時還需要考慮其安全性,尤其在大功率或密閉空間應用場合,包裝時需要注意散熱設計和防碰撞設計。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19