一種四自由度并聯(lián)機(jī)構(gòu)及運(yùn)動(dòng)學(xué)分析
2021-11-25 09:08:10李特奇周毅鈞陳建鵬
機(jī)械工程師 2021年11期
李特奇,周毅鈞,陳建鵬
(安徽理工大學(xué)機(jī)械工程學(xué)院,安徽淮南 232001)
0 引言
并聯(lián)機(jī)構(gòu)的發(fā)展突飛猛進(jìn),在理論上,并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)平臺(tái)由多個(gè)支鏈支撐,使得該機(jī)構(gòu)具有很高的結(jié)構(gòu)強(qiáng)度[1-2]。基于并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)模擬器在民用、軍用設(shè)施上都應(yīng)用廣泛。并聯(lián)機(jī)構(gòu)現(xiàn)有的6自由度運(yùn)動(dòng)模擬器在汽車制造、航空航天、船舶、機(jī)器人、工業(yè)及民用娛樂領(lǐng)域都有著廣闊的應(yīng)用。隨著技術(shù)的發(fā)展,6自由度運(yùn)動(dòng)模擬器已成為一種高度耦合的系統(tǒng),對(duì)其進(jìn)行高精度的運(yùn)動(dòng)控制比較復(fù)雜。同時(shí),6自由度并聯(lián)機(jī)構(gòu)運(yùn)動(dòng)模擬器造價(jià)高昂,缺乏低自由度并聯(lián)機(jī)構(gòu)的經(jīng)濟(jì)適用性。4自由度并聯(lián)運(yùn)動(dòng)模擬器屬于少自由度并聯(lián)機(jī)構(gòu),常見的有2R2T型和3T1R型,該運(yùn)動(dòng)模擬器結(jié)構(gòu)簡(jiǎn)單,充分考慮到設(shè)計(jì)、制造和控制的經(jīng)濟(jì)性[3]。
趙鐵石等[4]首次提出了支鏈由簡(jiǎn)單串聯(lián)鏈組成的3T1R 型對(duì)稱4自由度并聯(lián)機(jī)構(gòu);陳巧紅等[5]運(yùn)用李群理論對(duì)3T1R型并聯(lián)機(jī)構(gòu)自由度分岔特性進(jìn)行了分析;張超等[6]對(duì)2RPU/2SPS并聯(lián)機(jī)構(gòu)進(jìn)行了位置正反解研究和運(yùn)動(dòng)學(xué)傳動(dòng)性能研究。
同3自由度和6自由度并聯(lián)機(jī)構(gòu)相比,2R2T型4自由度并聯(lián)機(jī)構(gòu)問題相對(duì)復(fù)雜。李秦川等[7]首次提出了對(duì)稱2R2T型4自由度并聯(lián)機(jī)構(gòu);葉偉、張偉中等[8-9]分別提出了一種運(yùn)動(dòng)部分解耦的2R2T并聯(lián)機(jī)構(gòu),并對(duì)該機(jī)構(gòu)位置正反解、奇異位型和工作空間進(jìn)行了分析。
根據(jù)車輛路面行駛時(shí)的運(yùn)動(dòng)特性,并結(jié)合2R2T型并聯(lián)機(jī)構(gòu)實(shí)際應(yīng)用中的巨大潛力,本文提出了一種2RRS/2UPS并聯(lián)機(jī)構(gòu),運(yùn)用螺旋理論對(duì)該機(jī)構(gòu)自由度進(jìn)行分析,并確定了該機(jī)構(gòu)合理的輸入選取;采用運(yùn)動(dòng)影響系數(shù)理論,推導(dǎo)并聯(lián)機(jī)構(gòu)的一、二階影響系數(shù),并得到相應(yīng)的數(shù)值算例,最后用Adams View軟件對(duì)其建模、仿真,進(jìn)行了數(shù)值驗(yàn)證。
1 建立模型
1.1 機(jī)構(gòu)描述
2RRS/2UPS 并聯(lián)機(jī)構(gòu)采用5自由度支鏈添加約束,機(jī)構(gòu)如圖1所示。
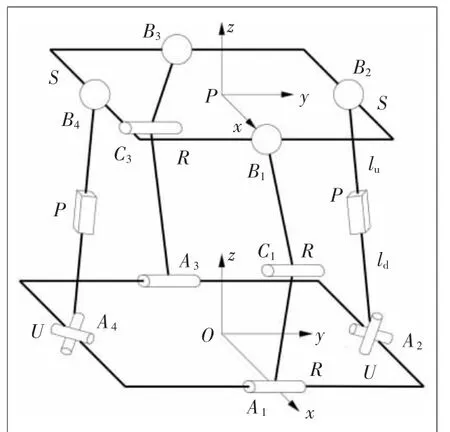
圖1 2RRS/UPS并聯(lián)機(jī)構(gòu)結(jié)構(gòu)簡(jiǎn)圖
2RRS/UPS 并聯(lián)機(jī)構(gòu)由定平臺(tái)、動(dòng)平臺(tái)、2個(gè)RRS支鏈及2個(gè)UPS支鏈組成。兩類支鏈在2個(gè)平臺(tái)之間呈對(duì)稱式分布。2個(gè)RRS支鏈的轉(zhuǎn)動(dòng)副軸線相互平行,所有支鏈都通過球鉸與動(dòng)平臺(tái)連接。該并聯(lián)機(jī)構(gòu)定平臺(tái)、動(dòng)平臺(tái)表面均為正方形,在兩平臺(tái)上分別建立定坐標(biāo)系Oxyz和動(dòng)坐標(biāo)系Pxyz。定坐標(biāo)系的原點(diǎn)為點(diǎn)O,處于x軸的A1A3和y軸的A2A4相交于點(diǎn)O,z軸垂直于定平臺(tái)方向向上。動(dòng)坐標(biāo)系的原點(diǎn)為點(diǎn)P,在初始位置時(shí),點(diǎn)P在點(diǎn)O正上方,兩坐標(biāo)系x、y軸分別平行。
1.2 自由度分析
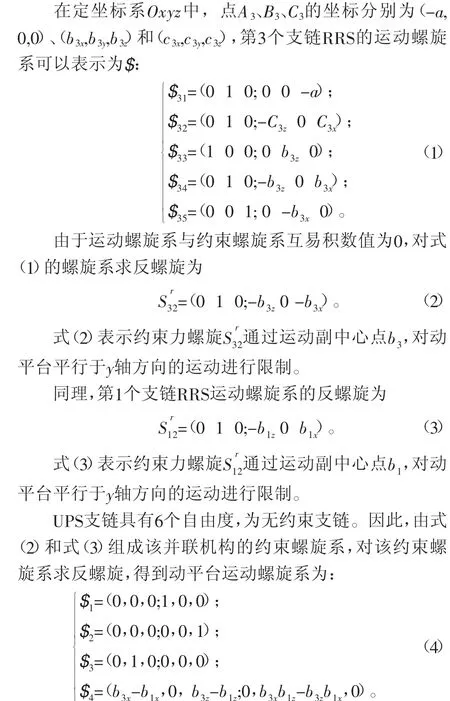
式(4)中,表明2RRS/2UPS并聯(lián)機(jī)構(gòu)動(dòng)平臺(tái)具有沿x軸、z軸移動(dòng)及繞x軸、y軸轉(zhuǎn)動(dòng)的自由度,基于該機(jī)構(gòu)設(shè)計(jì)的運(yùn)動(dòng)模擬器可實(shí)現(xiàn)縱向、升降、橫滾、俯仰4種運(yùn)動(dòng),側(cè)向和偏航運(yùn)動(dòng)被限制。
修正的Grübler-Kutzbach自由度公式為

式中:λ為空間自由度;n為機(jī)構(gòu)中含基連桿的連桿數(shù)目;fi為關(guān)節(jié)i具有的自由度;fp為所有的被動(dòng)自由度。
將各參數(shù)代入式(5),得機(jī)構(gòu)自由度為4。
2 位置分析
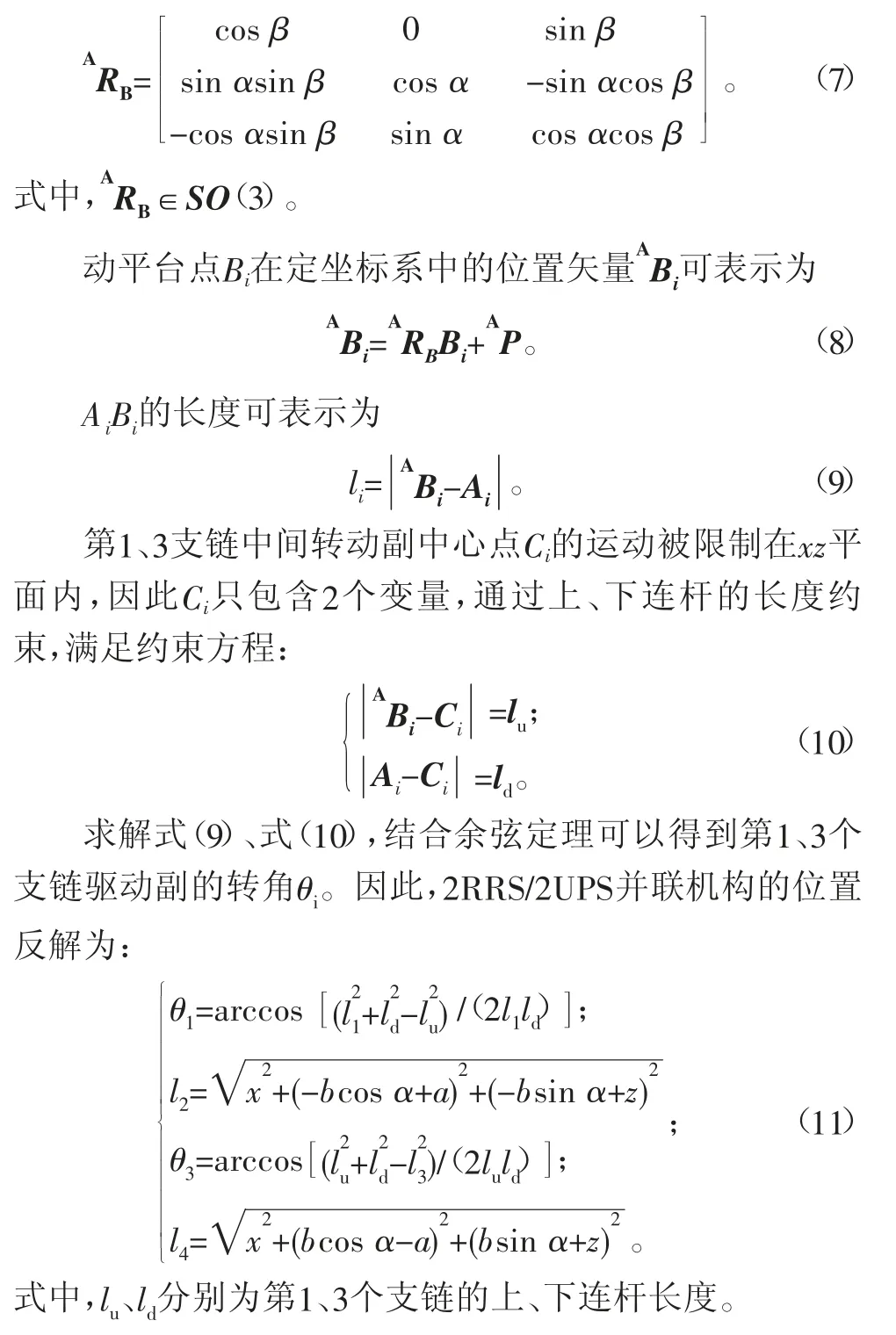
位置反解指已知?jiǎng)悠脚_(tái)的位置和姿態(tài)來求解各支鏈驅(qū)動(dòng)對(duì)應(yīng)的輸入量。本文機(jī)構(gòu)的位置反解是給定動(dòng)平臺(tái)中心點(diǎn)的位置x、z(y=0)及轉(zhuǎn)動(dòng)角α、β(γ=0),求解機(jī)構(gòu)4個(gè)驅(qū)動(dòng)副的位移量或轉(zhuǎn)動(dòng)量。
Ai和Bi分別表示為點(diǎn)Ai在定坐標(biāo)系中和點(diǎn)Bi在動(dòng)坐標(biāo)系中的坐標(biāo)矢量,如表1所示。
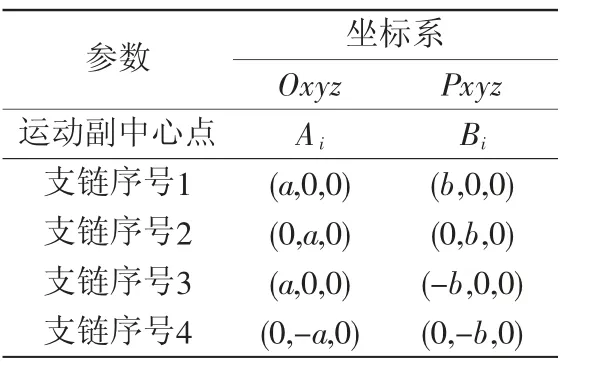
表1 平臺(tái)運(yùn)動(dòng)副中心點(diǎn)坐標(biāo)矢量
動(dòng)坐標(biāo)系相對(duì)于定坐標(biāo)系的位置用點(diǎn)P相對(duì)于點(diǎn)O的位置矢量記為AP表示,即

動(dòng)坐標(biāo)系相對(duì)于定坐標(biāo)系的坐標(biāo)旋轉(zhuǎn)矩陣ARB=RX(α)RY(β),表示為
3 運(yùn)動(dòng)學(xué)分析
3.1 并聯(lián)機(jī)構(gòu)的一階影響系數(shù)





3.2 數(shù)值算例
將a=200 mm、b=170 mm代入表1中,得到2RRS/2UPS并聯(lián)機(jī)構(gòu)定、動(dòng)平臺(tái)各運(yùn)動(dòng)副中心點(diǎn)參數(shù)。機(jī)構(gòu)動(dòng)平臺(tái)的初始高度H=320 mm,支鏈1、3上連桿長(zhǎng)度lu=172.1 mm,下連桿長(zhǎng)度ld=193.1 mm。在初始時(shí),動(dòng)坐標(biāo)系Pxyz和定坐標(biāo)系Oxyz重合。
以上機(jī)構(gòu)數(shù)據(jù)代入3.1節(jié)內(nèi)容,所求2RRS/2UPS并聯(lián)機(jī)構(gòu)的一階影響系數(shù)矩陣滿秩,如式(16)所示:
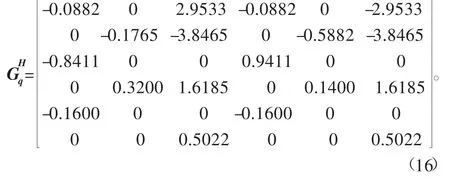
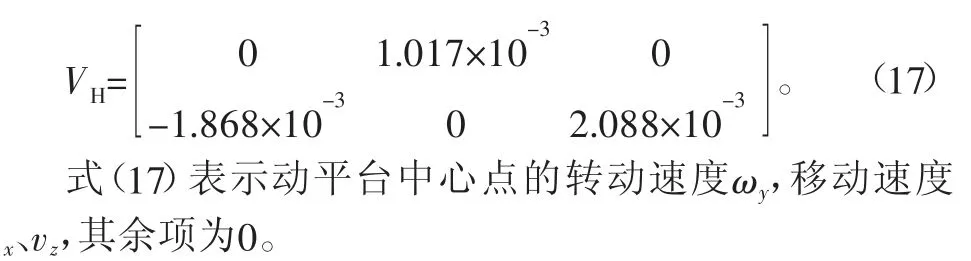
給該機(jī)構(gòu)驅(qū)動(dòng)副一組驅(qū)動(dòng)參數(shù):支鏈1為-0.107 rad/s,支鏈3為-0.2312 rad/s,支鏈2和支鏈4為0.02 m/s。聯(lián)立式(15)和式(16)可得動(dòng)平臺(tái)的輸出速度為
選擇X-Y-Z歐拉角對(duì)并聯(lián)機(jī)構(gòu)動(dòng)平臺(tái)的位置和姿態(tài)進(jìn)行描述,設(shè)置動(dòng)平臺(tái)運(yùn)動(dòng)規(guī)律如下
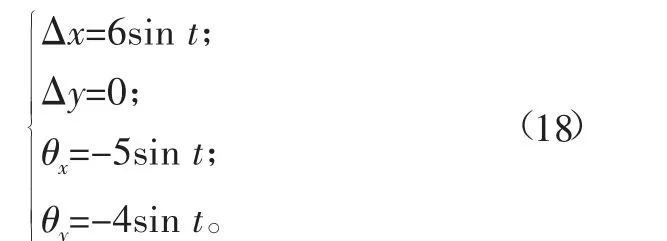
將式(18)給定動(dòng)平臺(tái)運(yùn)動(dòng)規(guī)律求導(dǎo)后可以得動(dòng)平臺(tái)的速度,再將第2節(jié)所求位置反解結(jié)果代入3.1節(jié)驗(yàn)證其正確性。最終得到的廣義速度、廣義加速度隨時(shí)間變化的曲線分別如圖3所示。
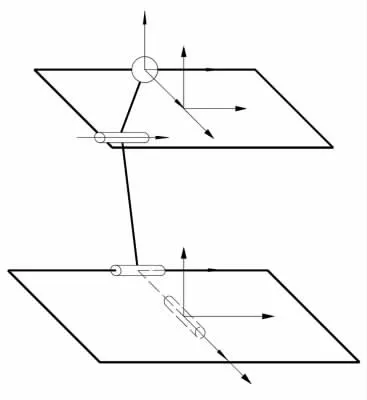
圖2 RRS支鏈虛設(shè)機(jī)構(gòu)簡(jiǎn)圖
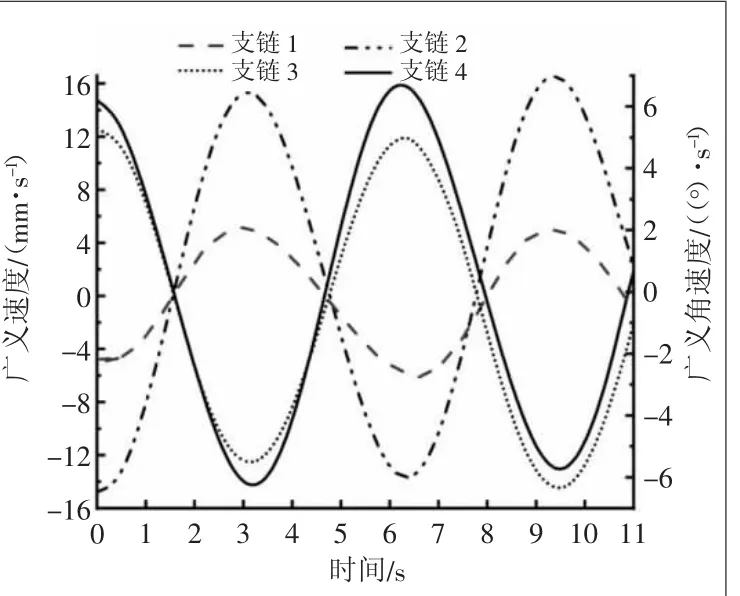
圖3 支鏈廣義速度曲線
3.3 Adams運(yùn)動(dòng)學(xué)仿真
為驗(yàn)證建立的并聯(lián)機(jī)構(gòu)運(yùn)動(dòng)學(xué)模型是否正確,在Adams View軟件中建立了2RRS/2UPS并聯(lián)機(jī)構(gòu)的模型,如圖4所示。按3.1節(jié)給機(jī)構(gòu)驅(qū)動(dòng)副一組驅(qū)動(dòng)參數(shù),運(yùn)行交互仿真,設(shè)置仿真時(shí)間為0.1 s,步長(zhǎng)為200,選取動(dòng)平臺(tái)中心點(diǎn)為標(biāo)記點(diǎn),繪制動(dòng)平臺(tái)中心點(diǎn)的移動(dòng)速度和角速度,如圖5所示。仿真結(jié)果表明,動(dòng)平臺(tái)中心點(diǎn)沿x、z軸的初速度分別趨近于-1.868 mm/s、20.88 mm/s,繞y軸的角速度趨近于0.0583(°)/s 即1.017×10-3rad/s。仿真結(jié)果與理論計(jì)算式(17)吻合。

圖4 Adams View中的2RRS/2UPS機(jī)構(gòu)模型
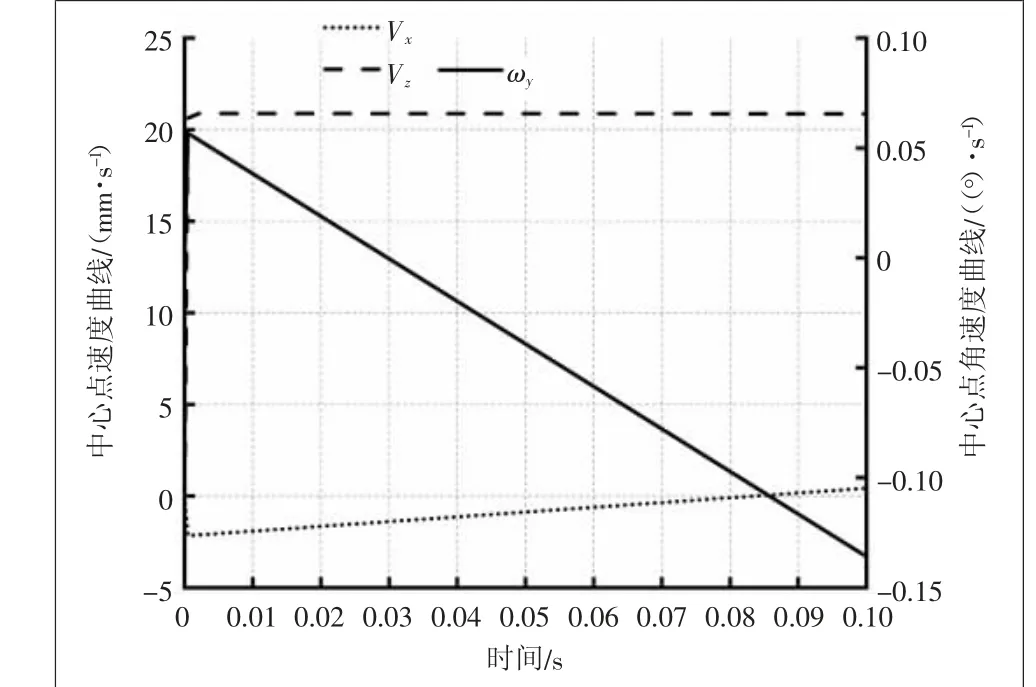
圖5 Adams View 仿真的中心點(diǎn)速度曲線
將式(18)給定的動(dòng)平臺(tái)運(yùn)動(dòng)規(guī)律添加到動(dòng)坐標(biāo)系的點(diǎn)P處,運(yùn)行交互仿真,設(shè)定仿真時(shí)間為11 s,步長(zhǎng)為300。通過仿真并計(jì)算分別得到第1、3個(gè)支鏈驅(qū)動(dòng)副的角速度,第2、4支鏈驅(qū)動(dòng)副的速度。本文給出仿真計(jì)算結(jié)果中的廣義速度曲線,如圖6所示。仿真計(jì)算結(jié)果還顯示,第1個(gè)、第3個(gè)驅(qū)動(dòng)副繞定坐標(biāo)系x軸、z軸的角速度趨于0。與圖3對(duì)比,可以看出曲線光滑,數(shù)值計(jì)算與仿真結(jié)果一致。綜上所述,機(jī)構(gòu)理論計(jì)算和軟件運(yùn)動(dòng)學(xué)仿真結(jié)果具有一致性,驗(yàn)證了機(jī)構(gòu)設(shè)計(jì)的合理性。
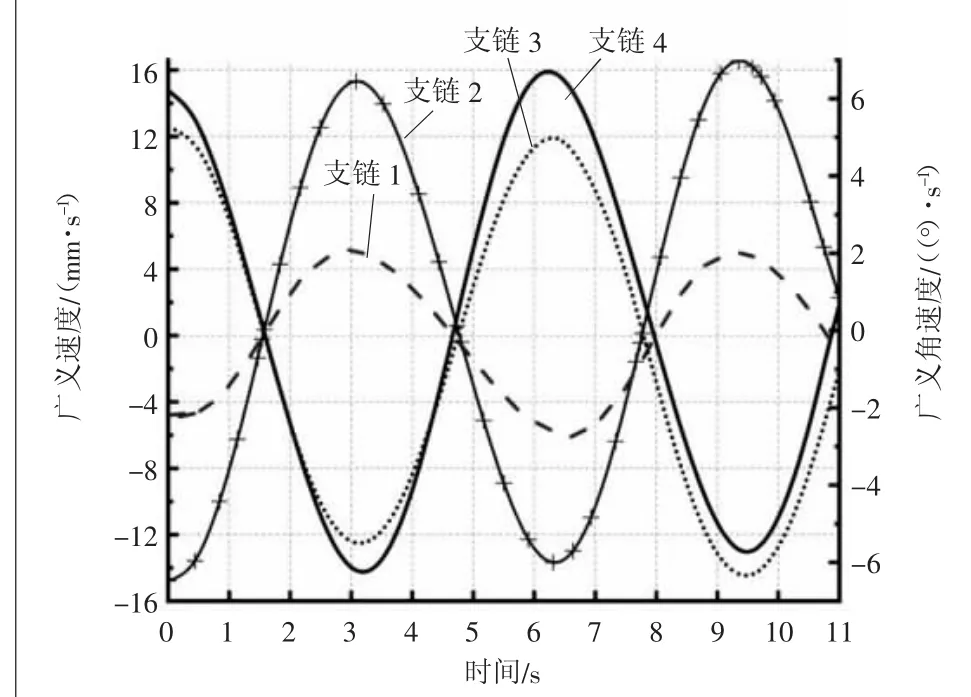
圖6 Adams View仿真的廣義速度曲線
4 結(jié)語(yǔ)
提出了一種2RRS/2UPS并聯(lián)機(jī)構(gòu),該機(jī)構(gòu)屬于2R2T型4自由度并聯(lián)機(jī)構(gòu),基于該機(jī)構(gòu)設(shè)計(jì)的車輛運(yùn)動(dòng)模擬器能夠?qū)崿F(xiàn)縱向、升降、橫滾、俯仰4種運(yùn)動(dòng)的模擬。利用螺旋理論和運(yùn)動(dòng)影響系數(shù)理論,結(jié)合虛設(shè)機(jī)構(gòu)法,可以用顯示表達(dá)式合理反映輸入空間對(duì)工作空間速度和加速度的線性映射。對(duì)2RRS/2UPS并聯(lián)機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)學(xué)仿真分析表明,該機(jī)構(gòu)運(yùn)動(dòng)曲線光滑連續(xù),幾乎無突變,穩(wěn)定可靠的運(yùn)動(dòng)特性為機(jī)構(gòu)的高精度控制提供了便利,基于2RRS/2UPS并聯(lián)機(jī)構(gòu)開發(fā)的運(yùn)動(dòng)模擬器具有很大的應(yīng)用潛力。
