5G遠(yuǎn)程遙控智能車的路徑規(guī)劃設(shè)計(jì)
2021-11-25 05:42:14高海軍王東成鐘奇梁瑞
科技信息·學(xué)術(shù)版 2021年25期
高海軍 王東成 鐘奇 梁瑞
摘要:為了方便人們遠(yuǎn)程購物,設(shè)計(jì)5G遠(yuǎn)程遙控智能車,著重于其路徑規(guī)劃設(shè)計(jì)。自動(dòng)識(shí)別設(shè)置路線,然后根據(jù)路線走向,實(shí)現(xiàn)快速穩(wěn)定的尋線行駛。智能車以AT89C51?單片機(jī)作為系統(tǒng)控制處理器;采用紅外傳感器獲取路線的信息,再進(jìn)行對車的速度和方向的控制。此外,對整個(gè)控制軟件進(jìn)行設(shè)計(jì)和程序的編寫以及程序的調(diào)試,并最終完成軟件和硬件的測試融合,最終實(shí)現(xiàn)預(yù)期功能。
關(guān)鍵詞:智能車;遠(yuǎn)程遙控;路徑規(guī)劃
1.引言
為了方便人們遠(yuǎn)程購物,設(shè)計(jì)5G遠(yuǎn)程遙控智能車。利用紅外發(fā)射管和接收管模塊對路面軌跡進(jìn)行檢測,將接收到的軌跡信息傳送到單片機(jī)中,然后調(diào)用PWM調(diào)用函數(shù),改變左右PWM占空比,控制電機(jī)速度,然后去控制方向,最終實(shí)現(xiàn)智能小車按照路面上的預(yù)定軌跡進(jìn)行行駛。
2.主要內(nèi)容
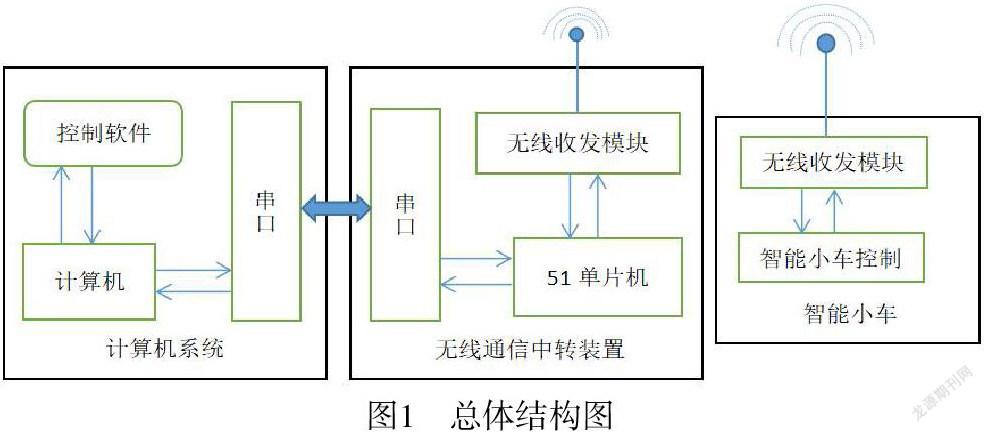
路徑規(guī)劃設(shè)計(jì)主要包括初始化階段和按預(yù)定軌跡自動(dòng)行走兩個(gè)階段。智能車能夠根據(jù)路徑設(shè)計(jì)自動(dòng)識(shí)別設(shè)置路線,然后根據(jù)路線走向,實(shí)現(xiàn)自動(dòng)穩(wěn)定的行駛。智能車以AT89C51?單片機(jī)作為系統(tǒng)控制中心,采用紅外傳感器獲取賽道的信息,通過調(diào)用PWM調(diào)用函數(shù),改變左右PWM占空比,控制電機(jī)速度,來對小車的方向進(jìn)行控制。此外,經(jīng)過對整個(gè)控制軟件進(jìn)行設(shè)計(jì)和程序的編寫以及程序的調(diào)試,完成軟件和硬件的測試,最終實(shí)現(xiàn)車的自動(dòng)尋跡行駛功能。安裝WIFI視頻傳輸模塊,采用Openwrt視頻攝像頭WiFi模組套件,在WiFi板上運(yùn)行mjpg-streamer程序可以把USB攝像頭的視頻進(jìn)行編碼,然后通過WiFi返回給上位機(jī),可以清晰看到智能車行走路徑。系統(tǒng)總體設(shè)計(jì)框圖如圖1所示。
3.遙控模塊設(shè)計(jì)
遙控模塊采用HS10-PWM遙控接收器。
(1)遙控器工作電壓:DC?2.8V-3.3V(安裝使用2節(jié)?1.5V?5號電池)
(2)接收主板工作輸入電壓范圍:DC?6.0V-12V?(請使用動(dòng)力型鋰電池,根據(jù)馬達(dá)的電壓和功率選擇適配的電源設(shè)備)
(3)接收主板工作輸出電壓電流:5路輸出/每單路輸出電壓和電源輸入電壓相同,其中2個(gè)搖桿為電位器油門比例調(diào)速控制原理,控制接收板對應(yīng)的4路輸出的電壓由低拉高來改變電機(jī)的轉(zhuǎn)速;每單路輸出最大峰值電流7A,最大持續(xù)負(fù)載電流4A;
(4)遙控頻率:2.4GHZ
(5)實(shí)測遙控距離:30-50米(接收板裸露,天線堅(jiān)起離地高度10厘米,寬敞地面實(shí)測遙控距離,加裝信號增強(qiáng)器后遙控距離最遠(yuǎn)可以達(dá)到500米);
裝上電池打開開關(guān),遙控器的紅色指示燈開始閃爍,表示信號等待連接中;把接收板的電源線連接好并通電,打開開關(guān),接收板的電源指示燈亮,遙控器紅燈急閃2下后熄滅,表示對頻連接成功,然后就可以開始使用了,按下遙控器的操作桿和按鈕,就能控制接收主板相對應(yīng)電路輸出電壓。
4.WIFI視頻傳輸模塊設(shè)計(jì)
4.1WIFI視頻傳輸模塊采用了Openwrt視頻攝像頭WiFi模組套件。
OpenWRT是一個(gè)高度模塊化、高度自動(dòng)化的嵌入式Linux系統(tǒng),擁有強(qiáng)大的網(wǎng)絡(luò)組件和擴(kuò)展性。OpenWRT不同于其他許多用于路由器的發(fā)行版,它是一個(gè)從零開始編寫的、功能齊全的、容易修改的路由器操作系統(tǒng),可以加快開發(fā)速度,這給開發(fā)者帶來了極大便利。OpenWrt對ARM、X86、MIPS或PowerPC等處理器,都有很好的支持作用。同時(shí)附帶3000多種軟件包,囊括從工具鏈(toolchain),到內(nèi)核(Linux?kernel),到軟件包(packages),再到根文件系統(tǒng)(rootfs)整個(gè)體系,用戶可以根據(jù)自身需要,很方便的自定義其功能來制作固件,可以移植各類功能到OpenWrt下也很方便。簡而言之,就是從思科的路由源碼改造過來的,一個(gè)適用于某些特定芯片的路由器的小型Linux系統(tǒng)。有了這個(gè)系統(tǒng),路由器就不再具有單一上網(wǎng)功能那么簡單,還可以在上面安裝各種驅(qū)動(dòng)以及程序。把路由器作為平臺(tái),用戶可以自由地加載USB攝像頭、網(wǎng)卡、聲卡等設(shè)備。
WiFi板上運(yùn)行著一款叫做mjpg-streamer的視頻解析軟件程序,是一個(gè)優(yōu)秀的開源project,它可以通過HTTP的方式訪問linux上面的兼容攝像頭,它可對USB攝像頭的視頻進(jìn)行編碼,然后通過WiFi傳輸?shù)缴衔粰C(jī),這樣就可以看到來自智能小車的視頻圖像。同時(shí)一般路由器都預(yù)留有TTL串口,它可以實(shí)現(xiàn)調(diào)試或者刷機(jī)功能。當(dāng)把這個(gè)TTL串口引出來,然后通過安裝在路由器里面的Ser2net轉(zhuǎn)發(fā)軟件,就能把來自WiFi信號的指令傳到串口,進(jìn)行輸出。接上5V電源,及TTL(單片機(jī)串口電平信號TX、RX、GND)信號線就可使用,編寫單片機(jī)控制程序,下載到單片機(jī)芯片上,經(jīng)安卓手機(jī)WIFI就可以控制小車運(yùn)動(dòng),外加高清攝像頭,便可以實(shí)時(shí)在手機(jī)上看到視頻。
4.2?傳輸模塊參數(shù)
攝像頭和WIFI數(shù)傳模塊都采用DC5V電壓供電,攝像頭輸出格式為mjpeg,輸出幀速為30FPS,可以手動(dòng)調(diào)焦,30W高清像素。WIFI數(shù)傳模塊采用TTL串口進(jìn)行通信,含有64M超大內(nèi)存處理芯片內(nèi)置天線,安裝不會(huì)阻擋,信號穩(wěn)定且功耗低。
5.避障模塊設(shè)計(jì)
采用紅外線避障方法,利用單片機(jī)產(chǎn)生38KHz信號對紅外線發(fā)射管進(jìn)行調(diào)制發(fā)射,發(fā)射出去的紅外線遇到障礙物時(shí)反射回來。利用一個(gè)管發(fā)射另一個(gè)管接收,接收管根據(jù)外界紅外線的接收強(qiáng)弱來判斷距離障礙物的遠(yuǎn)近。為減小外界可見光對紅外線接收的影響和干擾,使用250Hz的信號對38KHz的載波進(jìn)行調(diào)制,有利于單片機(jī)對信號進(jìn)行處理。紅外線接收管對反射回來的信號進(jìn)行解調(diào),輸出TTL電平。發(fā)射距離遠(yuǎn)近由RW進(jìn)行調(diào)節(jié),本設(shè)計(jì)調(diào)節(jié)為10cm左右。利用單片機(jī)特有的中斷系統(tǒng),當(dāng)智能小車遇到障礙物時(shí),控制電機(jī)轉(zhuǎn)速使小車轉(zhuǎn)彎,改變方向。由于只采用了一組紅外線收發(fā)對管,在避障轉(zhuǎn)彎方向上,程序采用遇到障礙物向左轉(zhuǎn)。調(diào)試時(shí)主要調(diào)制發(fā)射頻率為接收頭能接收的頻率,可以用單片機(jī)程序解決。發(fā)射信號強(qiáng)弱可改變可調(diào)精密電阻值進(jìn)行調(diào)節(jié)。智能車如果多加另外一組紅外收發(fā)對管,即可實(shí)現(xiàn)判斷左轉(zhuǎn)還是右轉(zhuǎn)功能。
6.路徑規(guī)劃設(shè)計(jì)
初始化階段:人工根據(jù)目標(biāo)軌跡穿過遙控車一次,控制器根據(jù)信號強(qiáng)度計(jì)算車到各基站的距離,并計(jì)算車的坐標(biāo)位置。控制器還記憶車在初始化階段的坐標(biāo)位置,并將其存儲(chǔ)為預(yù)設(shè)軌道自動(dòng)行走階段:處于自動(dòng)行走階段的車按照預(yù)定的行走路徑行走,控制器判斷車的行走路徑是否偏離預(yù)設(shè)軌跡,如果偏離預(yù)設(shè)軌跡,則對車的行走路徑偏離進(jìn)行處理,在行走過程中,控制器判斷車是否遇到障礙物。如果遇到障礙物,通過調(diào)用PWM調(diào)用函數(shù),改變左右PWM占空比控,制汽車?yán)@過障礙物。通過多個(gè)基站,在車上放置一個(gè)接收機(jī),計(jì)算出到各基站的距離,得到車的當(dāng)前位置。這樣,車軌道可以根據(jù)使用需要任意確定,通過在初始階段駕駛車軌道一次,車可以通過自學(xué)習(xí)使軌道行走,精度可以達(dá)到5cm?左右,當(dāng)位置達(dá)到時(shí),再通過紅外線精確定位,可改變預(yù)定路線,遇到障礙物時(shí)將繞過。
7.結(jié)論
設(shè)計(jì)5G遠(yuǎn)程遙控智能車,著重于其路徑規(guī)劃設(shè)計(jì)。主要實(shí)現(xiàn)三個(gè)功能。其一,通過單片機(jī)控制,采用紅外線避障方法,利用單片機(jī)產(chǎn)生38KHz信號對紅外線發(fā)射管進(jìn)行調(diào)制發(fā)射,發(fā)射出去的紅外線遇到障礙物時(shí)反射回來。利用一個(gè)管發(fā)射另一個(gè)管接收,接收管根據(jù)外界紅外線的接收強(qiáng)弱來判斷障礙物的遠(yuǎn)近,實(shí)現(xiàn)了避障功能。其二,在WiFi板上運(yùn)行mjpg-streamer程序可以把USB攝像頭的視頻進(jìn)行編碼,然后通過WiFi返回給上位機(jī),我們就可以看到來自智能車的視頻圖像,實(shí)現(xiàn)了視頻傳輸功能。其三,通過調(diào)用PWM調(diào)用函數(shù),改變左右PWM占空比,控制電機(jī)速度,加上路徑記憶設(shè)計(jì),便可精準(zhǔn)按預(yù)定路線行駛。系統(tǒng)運(yùn)行正常,下一步將在無線通信距離及效率方面做進(jìn)一步改進(jìn)。
參考文獻(xiàn)
[1]基于PWM調(diào)速的智能小車控制系統(tǒng)實(shí)現(xiàn)[J]王海波,馮蓉珍,司俊,黃金彪.科技廣場?.2011?(11)
[2]基于Android平臺(tái)的WIFI遙控智能小車的設(shè)計(jì)[J].張萍,陳國壯,候云雷,李東.計(jì)算機(jī)測量與控制.2018(06)
[3]基于機(jī)器視覺的智能小車自動(dòng)循跡及避障系統(tǒng)[J].岳俊峰,李秀梅.杭州師范大學(xué)學(xué)報(bào)(自然科學(xué)版).2020(02)
[4]多傳感器融合的視覺導(dǎo)航智能車避障仿真研究[J].王檀彬,陳無畏,李進(jìn),焦俊.系統(tǒng)仿真學(xué)報(bào).2009(04)
基金項(xiàng)目:國家級大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練計(jì)劃項(xiàng)目“5G遙控多功能購物智能車”(202110066026)。
作者簡介:高海軍(1997-),男,本科生,自動(dòng)化專業(yè)。
基金項(xiàng)目:國家級大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練計(jì)劃項(xiàng)目“5G遙控多功能購物智能車”(202110066026)。