雙螺旋對輥式辣椒收獲裝置的設計與試驗
2021-11-26 10:21:44袁小偉楊雙平金若成趙黎煒道爾吉才仁付溫平
農業工程學報 2021年15期
袁小偉,楊雙平,金若成,趙黎煒,道爾吉才仁,鄭 楠,付溫平
·農業裝備工程與機械化·
雙螺旋對輥式辣椒收獲裝置的設計與試驗
袁小偉1,2,楊雙平2,金若成3※,趙黎煒3,道爾吉才仁1,鄭 楠3,付溫平4
(1. 巴音郭楞職業技術學院,庫爾勒 841000; 2. 新疆農業大學機電工程學院,烏魯木齊 830052;3. 巴音郭楞蒙古自治州農業農村機械化發展中心,庫爾勒 841000; 4. 庫爾勒源豐農機有限公司,庫爾勒 841000)
針對色素辣椒采收需求大,人工采收困難,采收效率低,破損率高等問題,該研究設計了一種雙螺旋對輥式辣椒收獲裝置。首先通過對辣椒與螺旋鋼棒接觸點進行受力分析,確定影響采收性能的主要因素,并通過單因素試驗確定優化試驗中各因素選取范圍。并以打完脫葉劑2 d后,辣椒莖稈含水率≤40%的新疆巴州焉耆縣色素辣椒為試驗對象,以采凈率和破損率為試驗指標,以工作速度、對輥轉速、對輥間距和對輥螺距為試驗因素,進行四因素五水平正交中心組合優化試驗;運用Design-expert 10軟件對試驗結果進行參數優化,通過驗證試驗對優化后的參數進行驗證。試驗結果表明:當工作速度為2.1 km/h,對輥轉速為142 r/min,對輥間距為24.3 mm,對輥螺距為10 cm時,采凈率為98.7%,破損率為3.46%,滿足色素辣椒收獲機田間作業要求。研究結果可為色素辣椒收獲機的設計和優化提供參考。
農業機械;設計;試驗;辣椒收獲;螺旋對輥
0 引 言
辣椒是一年或有限多年生草本植物,是中國蔬菜產業中重要大產業[1]。近年來辣椒種植面積不斷擴大,截止到2018年國內辣椒的種植面積已達160萬hm2。新疆地區辣椒種植總面積約12萬hm2,其中色素辣椒約10.6萬hm2[1]。色素辣椒中含有辣椒紅色素和辣椒玉紅素等天然色素,經濟價值較高[2-4]。色素辣椒生長期全程用工量較大,人工采收成本高,效率低,若不能及時收獲和晾曬,極易造成產品浪費,商品轉化率降低[1],因此,亟需高效的色素辣椒收獲機械。
目前色素辣椒收獲機主要有梳齒式和螺旋輥式兩種,作業過程均為先采收后進行收集和清雜[1,4],這兩種收獲機采收方式不同。梳齒式辣椒收獲機主要以牧神為代表[5-6],采用橫置帶有梳齒的滾筒對辣椒進行梳理和拉拔采收,該結構采收時不需要對辣椒進行對行,因此收獲速度快、效率高[7-8],但該裝置采收面大,采摘過程為無差別采收,將部分枝葉一并采收,含雜率較高,且由于其結構特殊性,在滾筒高速運轉采收時,梳齒極易對辣椒造成花皮損傷[9],使得辣椒色價下降,影響辣椒的收購價格。
螺旋輥式辣椒收獲機主要以中農博遠和美國Boese為代表[10-13],該機型模擬人手撥動物體動作,通過高速旋轉的螺旋輥產生的撥動力實現辣椒采收。由于螺旋輥作用范圍小,可有效減少斷莖,且采收時螺旋鋼棒對辣椒的接觸為點接觸,接觸面積小,可降低辣椒采收破損率,但該機型在采收時需要對行采收[14-15],相比梳齒式采收效率降低。
韓國研發了一種基于機器視覺的辣椒采收裝置[16],其通過多攝像頭對辣椒進行識別定位,再利用剪切機構對辣椒進行剪切采收,該裝置目前處于試驗階段,采收效率較低,不適用于新疆地區統收的色素辣椒。
為降低采收過程對辣椒的損傷,本文裝置設計參考了玉米螺旋收獲裝置螺旋對輥作業方式[17-18],但考慮到將辣椒從莖稈脫離需要向上的力,為適應辣椒收獲,將玉米收獲裝置對輥旋向進行調換,改變了力的作用方向,通過相互向外轉動的對輥,對辣椒產生向上的撥動力,使得辣椒與固定在地面的莖稈分離,完成采收,且將原螺旋對輥設計為雙螺旋對輥,以期提高辣椒采收效率。擬通過四因素五水平參數優化試驗,得出最優結構和作業參數,并通過試驗進行驗證,以期為特色作物收獲機具設計提供參考依據。
1 結構與工作原理
1.1 整機裝置結構
雙螺旋對輥式辣椒收獲裝置為自走式,主要包括駕駛艙、扶禾器、雙螺旋對輥、輸送帶、收集箱等。扶禾器安裝在機具最前端,用于對行,對辣椒進行采收前預整理。雙螺旋對輥呈一定傾斜角度安裝在扶禾器后方,對辣椒進行采收。輸送帶安裝在雙螺旋對輥的側下方,與側邊擋板配合,通過安裝在后方的升運器將采收下來的辣椒輸送到收集箱。
1.2 工作原理
圖2所示部分為雙螺旋對輥式辣椒收獲裝置前端采收部分,工作時,機具對行向前行進,安裝在機具前端的扶禾器對未采收的辣椒進行預整理,使得并排放置的兩個雙螺旋對輥順利進入指定辣椒采收位置。對輥高速轉動,旋向向外,對它們之間接觸到的辣椒產生向上的拉拔力,將辣椒從固定在地面的莖稈上脫離。同時,由于機具始終向前行進,雙螺旋對輥并排傾斜布置,對莖稈任意結椒位置均可完成采收。從莖稈脫離下來的辣椒掉落到輸送帶上,由輸送帶運到后方,進行清雜和收集,完成辣椒采收作業。
1.3 雙螺旋對輥設計及影響因素確定
雙螺旋對輥是雙螺旋對輥式辣椒收獲裝置的關鍵部件,直接影響裝置的采收性能。其螺旋角是反映螺旋葉片對辣椒作用力方向的主要參數,螺旋角過大,葉片對辣椒的作用力方向過前,不能及時對辣椒形成向上的拉拔力,易造成采收不充分;螺旋角過小,在直徑一定時,會造成螺距增大,增加空行程,螺旋鋼板不能及時對辣椒作用,容易造成采收擁堵,降低采凈率,因此在設計雙螺旋對輥時螺旋角是主要參考依據。若設計為單頭螺旋,則在保證螺旋角的前提下,螺距較大,不能充分對辣椒進行采收,若設計為三頭及以上,則在保證螺旋角的前提下,螺距較小,影響辣椒進入采收位置,螺旋鋼棒無法對辣椒施加作用。因此選用雙螺旋對輥設計對辣椒進行采收。
如圖3所示,考慮到螺旋葉片的加工安裝和結構強度,按照實際經驗取螺旋葉片厚度為3 mm。螺旋葉片直徑是對辣椒采收直接作用的尺寸,若螺旋葉片直徑較小,則螺旋鋼棒對辣椒的作用距離較短,采收效果較差,若螺旋葉片直徑較大,則會增大裝置結構,造成采收時采收位置不足,無法充分對辣椒進行采收。
如圖4a所示,辣椒最初在點接觸到螺旋鋼棒上端頂點,瞬時跟隨螺旋鋼棒做圓周運動,假定跟隨轉動到點時,辣椒即將脫離莖稈,此時螺旋鋼棒轉過的角度為(°),莖稈緊貼螺旋鋼棒點最外側,順著莖稈方向,及方向上,莖稈對辣椒的作用力為2,則此時莖稈對辣椒水平方向的作用力為
2x=2cos(90°-/2) (1)
在作用力2一定時,要求對輥帶動辣椒轉過的角度不易過大,因為若莖稈對辣椒水平方向的分力過大,則會導致辣椒側滑,至下一螺旋鋼棒采收,造成二次擊打,損傷辣椒。為確保辣椒能夠單次順利完成采收作業,應使得對輥轉過的角度不大于,即對輥轉到點位置。若螺旋鋼棒與辣椒之間的摩擦系數為,則在理想狀態下有
2x≤2y(2)
2y=2sin(90°-/2) (3)
查閱相關資料[19-20],類比選取螺旋鋼棒與辣椒之間的摩擦系數為0.4,代入上式計算得到,理想狀態下,當對輥帶著辣椒至少轉過的角度為43.6°時,辣椒采凈率較高。
對不同植株上不同高度的辣椒進行拉拔采摘試驗,測量得到從辣椒接觸到螺旋鋼棒到從莖稈脫落所需的最大行程平均值為30 mm,則所需的螺旋葉片的最小直徑為
代入數值計算得到所需的螺旋葉片最小直徑為87.1 mm,考慮螺旋鋼棒尺寸作用,本次設計螺旋葉片直徑為90 mm。螺旋葉片外側與辣椒直接接觸的螺旋鋼棒直徑若取值過大,則無法有效對辣椒作用產生向上的拉拔力,且會造成裝置體積質量增加,若直徑過小,則會使得采收對辣椒損傷嚴重,因此螺旋鋼棒在允許范圍內直徑越大越好。辣椒尾端直徑約為30 mm,螺旋鋼棒直徑不應大于接觸部位辣椒直徑的一半,否則不能有效與辣椒接觸,考慮到辣椒果梗直徑大小,本次設計取鋼棒直徑為10 mm。
在采收作業時,辣椒處于雙螺旋對輥之間,共有兩種情況,辣椒與左側螺旋輥接觸或辣椒與右側螺旋輥接觸。無論在哪一側,辣椒在接觸到雙螺旋對輥上螺旋葉片邊緣的鋼棒時,為點接觸。因此將該問題簡化到單邊螺旋鋼棒上進行辣椒受力分析,如圖4所示,辣椒瞬時跟隨鋼棒運動,此時在該接觸點上,鋼棒對辣椒產生垂直向上,即在軸方向的力為:
=1cos(+) (5)
對于雙螺旋對輥的螺旋角有
注:1為螺旋葉片與辣椒接觸點線速度,m/s;1為工作速度,km/h;v為工作速度在軸方向的分速度,m/s。
Note:1is the linear velocity of the contact point between the spiral blade and the pepper, m/s;1is the working speed, km/h;vis the sub-velocity of the working speed in the-axis direction, m/s.
圖5 辣椒在對輥上的速度分析
Fig.5 Velocity analysis of pepper on the pair roller
辣椒接觸螺旋鋼棒,瞬時產生的速度,m/s,方向與軸方向一致,由螺旋葉片旋轉產生的線速度與機具向前行進的工作速度合成,即:
=1+v(7)
其中
(8)
根據動量守恒定律,辣椒受到的沖擊力大小與其作用時間的乘積與辣椒動量的變化量相等,即:
1=Δ(9)
式中為辣椒受到沖擊力的作用時間,s;為受到沖擊的單個辣椒的質量,g,為辣椒瞬時的速度,m/s;Δ為辣椒速度的變化量。
對于辣椒受到沖擊力的作用時間,根據設計要求,辣椒從接觸螺旋鋼棒到脫離,雙螺旋對輥轉過的角度為,則沖擊力作用時間(s)為

結合上述,可計算得到鋼棒對辣椒產生的豎直向上的作用力大小,即辣椒受到的拉拔力大小為
辣椒在采收時,接觸點瞬時受到的豎直向上的作用力大小直接反映辣椒的采收效果,作用力過大,單次碰撞即可完成采收,采收充分,但會造成辣椒損傷嚴重;拉拔力過小,需要二次碰撞完成采收,采收不充分且會加劇辣椒損傷。
由式(11)可知,當螺旋葉片直徑為90 mm,螺旋鋼棒直徑為10 mm,工作角度一定時,影響辣椒所受拉拔力的主要因素有機具前進的工作速度1、對輥轉速2、對輥螺旋角;通過公式(11)可得知,工作速度1和對輥轉速2越大,則辣椒受到的作用力越大,對輥螺旋角越小,鋼棒對辣椒的作用力就越小。同時,由式(6)可知,對輥螺距4越大,對輥螺旋角就越大,辣椒受到作用力越小。因此,通過辣椒受力分析可以進一步確定影響裝置采收性能的主要因素為工作速度1、對輥轉速2和對輥螺距4。為驗證理論分析,提高裝置采收性能,需要通過單因素和多因素試驗對雙螺旋對輥式辣椒收獲裝置進行試驗驗證。
2 田間試驗
2.1 材料與方法
2.1.1 試驗材料
2020年7月在新疆巴州地區進行田間試驗,試驗材料選取采收期內,打完脫葉劑2 d后,辣椒莖稈含水率≤40%的色素辣椒,此時辣椒在采收時易于從莖稈脫落,采收過程對辣椒損傷較小,且脫葉之后采收的辣椒含雜率較低。
試驗儀器為自主研制的雙螺旋對輥式辣椒收獲裝置,單次可采收8行。對待采收的辣椒并排8行每100 m進行分段處理,在試驗時,每采收100 m作為一次獨立試驗。
2.1.2 試驗指標
本次試驗主要研究雙螺旋對輥式辣椒采收裝置前端部分的采收性能,因此取試驗指標為辣椒采凈率和破損率,通過重復試驗測定主要指標的變化規律,用于選擇合適的工作參數和結構參數。
采凈率1(%)
破損率2(%)
式中S為采收完成后收集裝置中所有的辣椒總質量,g;S為采收后裝置收集的辣椒與地面散落、莖稈上殘留辣椒質量的總和,g;S為采收后裝置收集的中存在破損的辣椒質量,g。
2.2 單因素試驗與結果分析
2.2.1 單因素試驗設計
雙螺旋對輥在采收辣椒時,辣椒處于兩對輥之間,對輥間距越小,螺旋鋼棒越容易對辣椒作用,采摘越充分,但同時會造成辣椒二次擠壓損傷,對輥間距越大,對辣椒損傷越小,但容易形成漏采。根據前文分析,本次試驗選取4個影響裝置采收性能的關鍵參數:工作速度、對輥轉速、對輥間距和對輥螺距,工作速度和對輥轉速可在駕駛室控制面板調節,對輥間距需要調節對輥安裝位置,對輥螺距需要更換雙螺旋對輥進行調節。
2.2.2 單因素結果與分析
對選取的4個參數分別進行單因素試驗,驗證各因素對裝置采收性能影響。對某個因素進行單因素試驗時,取其余參數的值為理論設計最小值,每次試驗做3次,結果取平均值,試驗結果如圖6所示。
1)工作速度
工作速度1是裝置工作時的行進速度,它直接反映裝置的工作效率。工作速度過大,會導致采收不充分,且由式(11)可知,辣椒受到瞬時作用力增大,會增加辣椒損傷;工作速度過小,采收效率較低,不能滿足生產要求。結合圖6a中試驗結果,工作速度在2~4 km/h范圍內,對裝置采收性能影響明顯,因此結合類似作物農機具的工作效率[21-22],本次選取工作速度為2~4 km/h進行優化試驗。
2)對輥轉速
對輥轉速2是雙螺旋對輥的轉動速度,對輥轉速提高,采凈率會明顯增大,但由式(11)可知,辣椒受到的作用力急劇增大,會造成辣椒損傷嚴重,因此選擇較優的對輥轉速是本次研究的重點。試驗結果如圖6b所示,當對輥轉速小于110 r/min時,辣椒采凈率低于95%,當對輥轉速大于190 r/min時,辣椒采凈率有降低趨勢,且辣椒破損率持續增大,因此本次選取對輥轉速為110~190 r/min進行優化試驗。
3)對輥間距
對輥間距3是兩個雙螺旋對輥之間的最小間距,這個間距值影響著裝置的采收性能。對輥間距較小時,采收效果較好,采凈率較高,但易造成辣椒損傷,且采收后的辣椒含雜率較高。對輥間距較大漏采現象嚴重,且會造成單次碰撞不能有效采收,形成二次碰撞,增大損傷率。試驗結果如圖6c所示,隨著對輥間距的增大,采凈率和破損率逐漸降低,在10~30 mm范圍內影響顯著,因此本次試驗選取對輥間距為10~30 mm進行優化試驗。
4)對輥螺距
對輥螺距4是雙螺旋對輥的重要結構參數,由式(6)和式(11)可知,當對輥螺距增大,辣椒瞬時受到的作用力增大,采收效率提高,但同時破損率也隨之增大。當對輥螺距減小時,破損率明顯減小,但也會導致采收效率下降。試驗結果如圖6d所示,隨著對輥螺距增大,采凈率和破損率逐漸增大,對輥螺距大于30 cm時,采凈率和破損率逐漸穩定,因此本次選取對采收性能影響較為顯著的對輥螺距為10~30 cm進行優化試驗。
通過單因素試驗對影響雙螺旋對輥式辣椒收獲裝置采收性能的顯著因素進行驗證,得到各因素影響的顯著范圍,擬通過對各影響因素在顯著范圍內進行交互試驗分析,以期得到雙螺旋對輥式辣椒收獲裝置較優的工作及結構參數組合,提高裝置采收性能。
2.3 交互試驗及結果分析
2.3.1 交互試驗設計
試驗選取工作速度1、對輥轉速2、對輥間距3、對輥螺距4為影響因素,設計四因素五水平正交中心組合優化試驗[23-24],試驗方案如表1所示,共進行30組試驗,每組試驗重復進行3次,取3次測試結果的均值作為試驗結果,試驗設計及結果分析應用的Design-expert 10軟件完成。
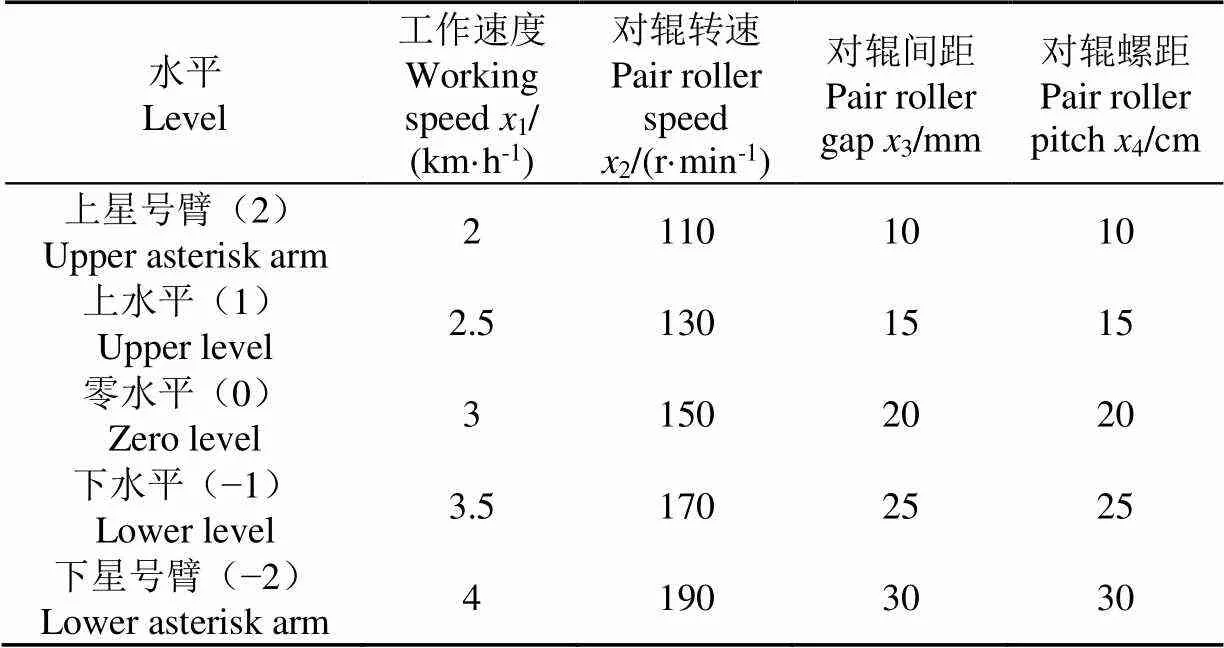
表1 試驗因素水平編碼表
2.3.2 交互試驗結果與分析
試驗結果如表2所示。
由表3采凈率1的方差分析可知,因素和因素的交互作用對于采凈率影響的主次順序依次為1、32、2、4、22、3、12、14、42、12、34,其中1、2、3、4、14、12、22、32影響極顯著(<0.01),12、34、42影響顯著(0.05≤<0.01),其他因素影響不顯著(>0.1)。失擬項=0.326 9,不顯著,證明不存在其他影響試驗指標的主要因素。
利用Design-expert 10軟件對試驗結果進行分析,并對各試驗指標進行多元回歸擬合,剔除不顯著因素,得到各因素水平對采凈率的回歸方程為
1=98.38?0.711+0.482?0.293?0.314?0.1612+
0.1814?0.1434?0.1912?0.2722?0.5232?
0.1242(14)
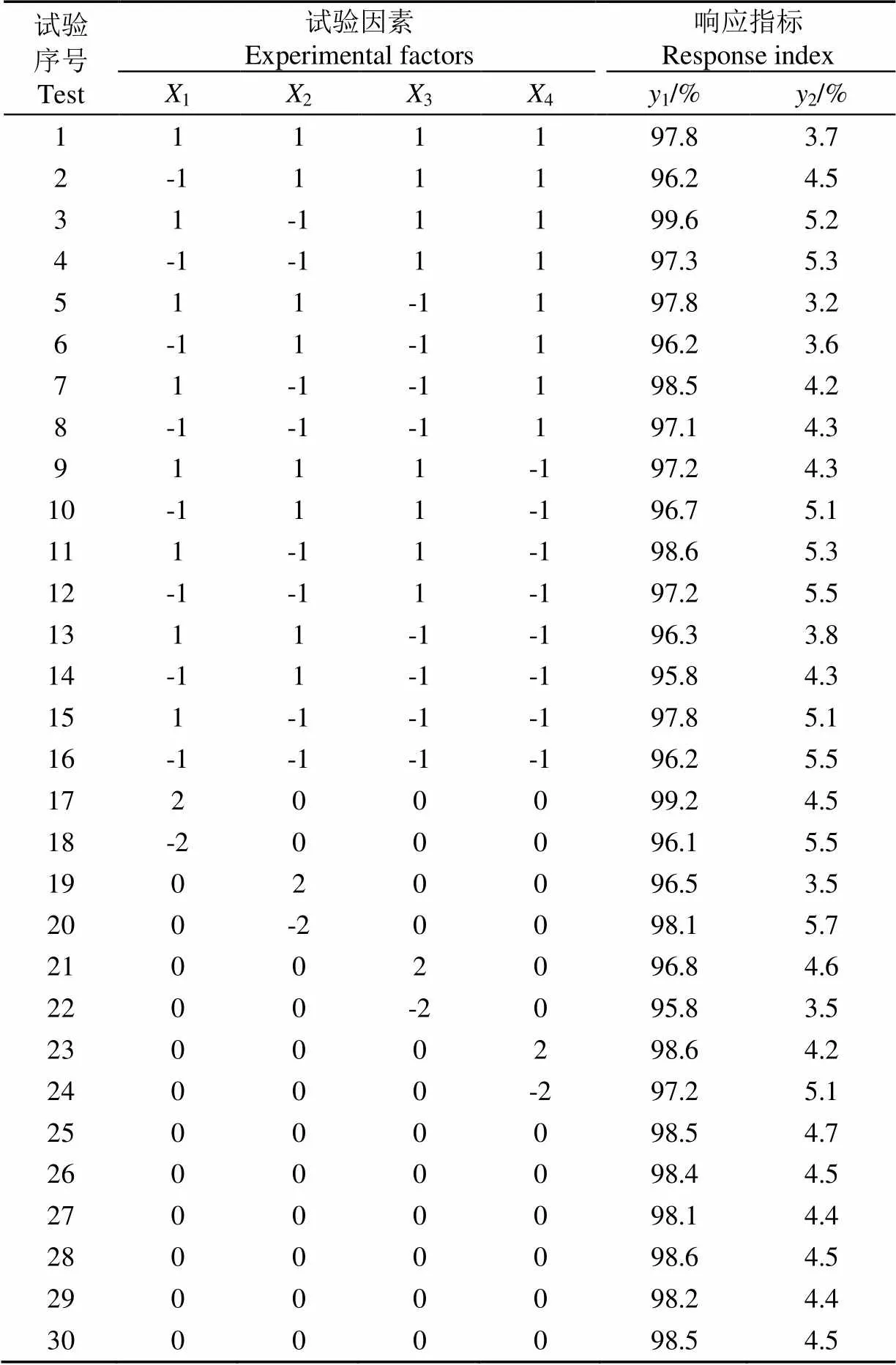
表2 二次旋轉正交組合試驗方案及結果
注:1、2、3、4分別為1、2、3、4的水平值。
Note:1,2,3, and4are the horizontal values of1,2,3, and4, respectively.
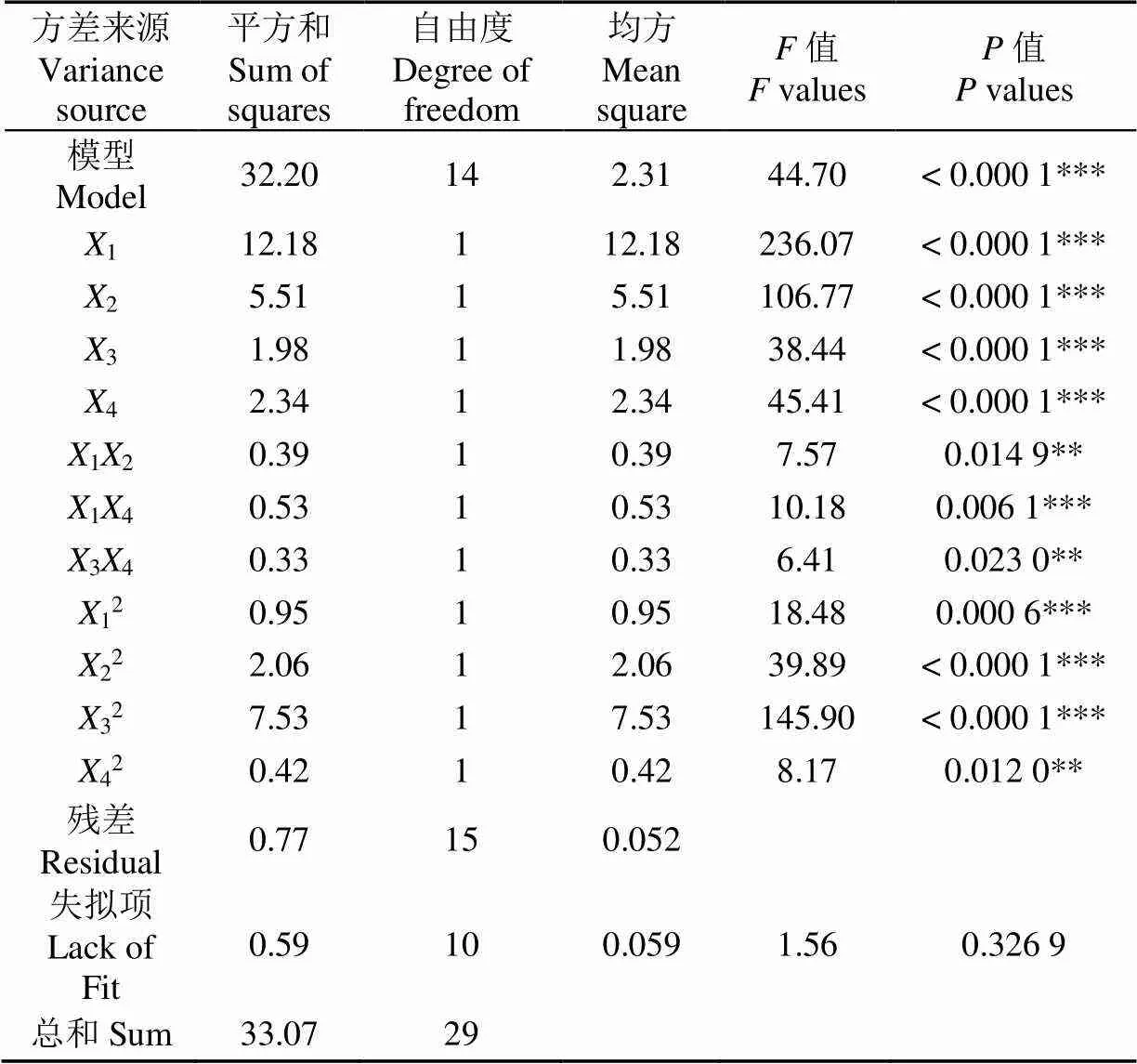
表3 采凈率方差分析
注:***表示極顯著(<0.01);**表示顯著(0.01≤<0.05);*表示較顯著(0.05≤<0.1),下同。
Note: *** means highly significant (<0.01); ** means significant (0.01≤<0.05); * means generally significant (0.05≤<0.1), the same below.
表4為破損率2的方差分析表可知,對于破損率,影響因素的主次順序依次為2、3、4、1、12、32、34、12,其中1、2、3、4、34、12、32影響極顯著(<0.01),12影響顯著(0.05≤<0.01),其他因素影響不顯著(>0.1)。失擬項=0.1512,不顯著,證明不存在其他影響試驗指標的主要因素。
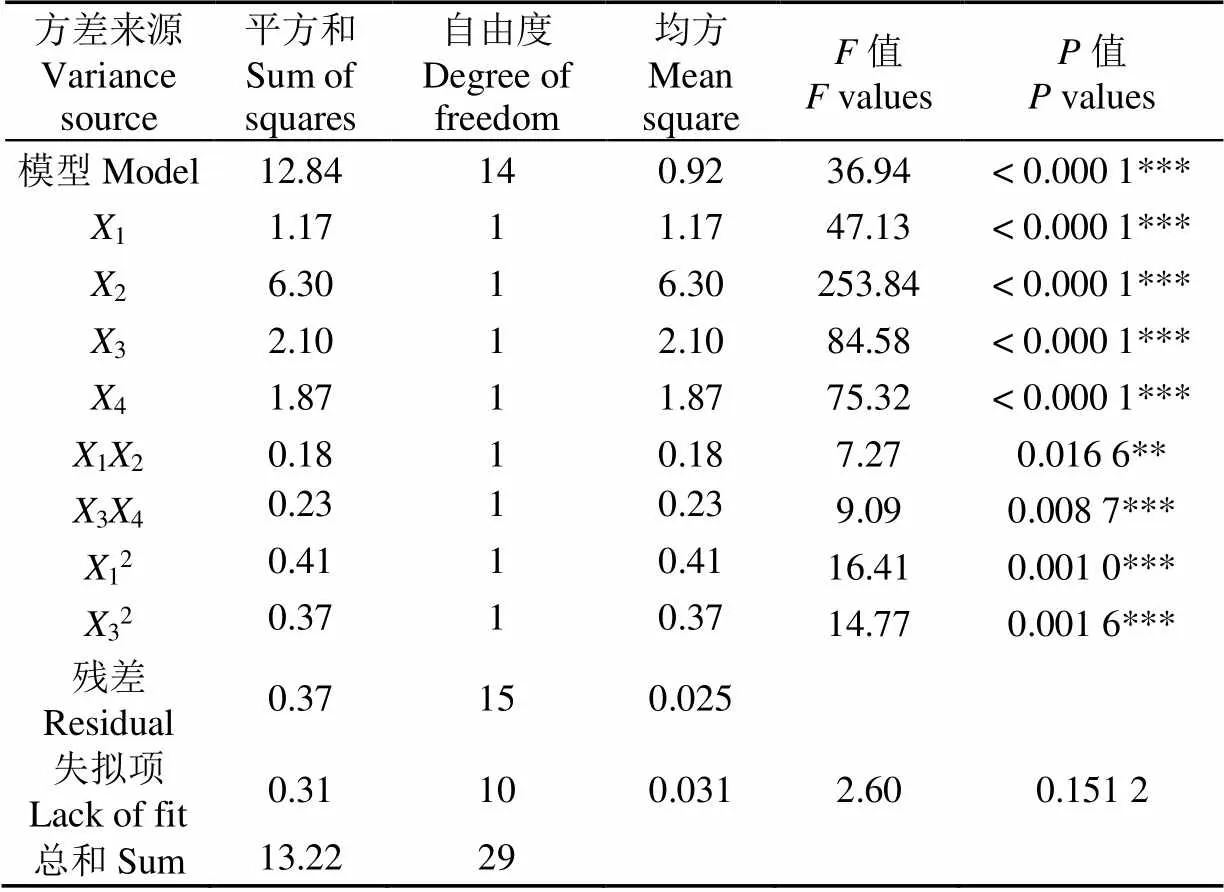
表4 破損率方差分析
利用Design-expert 10軟件對試驗結果進行分析,并對各試驗指標進行多元回歸擬合,剔除不顯著因素,得到各因素水平對破損率的回歸方程為
2=4.50+0.221+0.512?0.303+0.284?0.1112+
0.1234+0.1212?0.1232(15)
2.3.3 響應曲面分析
通過采凈率和破損率方差分析表可知,工作速度1、對輥轉速2、對輥間距3、對輥螺距4對辣椒采凈率和破損率均有顯著影響,但其交互作用存在不顯著項,利用Design-expert 10軟件得出顯著交互作用對采凈率和破損率的響應曲面,如圖7、圖8所示。
對于采凈率,當對輥間距為20 mm,對輥螺距為20 cm時,工作速度與對輥轉速的交互作用如圖7a所示:當工作速度一定時,采凈率隨對輥轉速的增大而增大,且增大趨勢逐漸減小。對輥轉速大于140 r/min時,隨著螺旋轉速的增大,采凈率≥97%。對輥轉速超160 r/min時,由響應曲面可知,采凈率的增幅較小,增大對輥轉速會極大的增加裝置的不穩定性,因此在達到設計采凈率要求的前提下,優先選用該范圍內較小的對輥轉速;對輥轉速一定時,采凈率隨著工作速度的減小而增大,工作速度低于3.1 km/h時,隨著工作速度降低,采凈率≥97%。工作速度是反映裝置工作效率的重要指標,因此在滿足采凈率要求的前提下,優先選用該范圍內較大的工作速度。
當對輥轉速為150 r/min,對輥間距為20 cm時,工作速度與對輥螺距的交互作用對采凈率的影響如圖7b所示:當對輥螺距一定時,采凈率隨著工作速度的減小而增大,但增幅較小。工作速度低于3.1 km/h時,隨著工作速度降低,采凈率≥98%。當工作速度一定時,采凈率隨著對輥間距的增大,先增大后減小,當對輥螺距約為19 mm時,采凈率取得極大值。
當工作速度為3 km/h,對輥轉速為150 r/min時,對輥間距和對輥螺距的交互作用對采凈率的影響規律如圖7c所示:當對輥螺距一定時,在對輥間距15~19 mm的范圍內,采凈率隨著對輥間距的增大而增大,在對輥間距19~25 mm的范圍內,采凈率隨著對輥間距的增大而降低。對輥間距在17~21 mm范圍內,采凈率≥98%。當對輥間距一定時,采凈率隨著對輥螺距的減小而增大,對輥螺距在15~21 cm范圍內,采凈率≥98%。當對輥螺距小于17 cm時,由響應曲面可知,采凈率增幅較小,且在對輥轉速一定時對輥螺距較小會導致采收效率降低,因此在滿足采凈率的前提下,在因素水平范圍內優先選擇較大的對輥螺距。
對于破損率,當對輥間距為20 mm,對輥螺距為20 cm時,工作速度與對輥轉速的交互作用如圖8a所示:當工作速度一定時,破損率隨著對輥轉速的增大而增大,對輥轉速在130~150 r/min范圍內,破損率≤4%,由于對輥轉速直接影響采收效率,因此在該范圍內優先選用較大的對輥轉速。當對輥轉速一定時,破損率隨著工作速度的增大而增大,工作速度在2.5~2.9 km/h范圍內,破損率≤4%,且隨著工作速度增大,破損率增幅較小,為提高采收效率,在該范圍內選擇較大的工作速度。
當工作速度為3 km/h,對輥轉速為150 r/min時,對輥間距和對輥螺距的交互作用對破損率的影響規律如圖8b所示:當對輥間距一定時,破損率隨著對輥螺距的增大而增大,對輥螺距在15~20 cm范圍內,破損率≤4%。當對輥螺距一定時,破損率隨著對輥間距減小而增大,對輥間距在19~25 mm范圍內,破損率≤4%。
2.4 參數優化及試驗驗證
2.4.1 參數優化
為了獲得雙螺旋對輥式辣椒收獲裝置的最佳性能參數和結構參數,利用Design-expert 10軟件中的優化模塊對2個回歸模型進行求解,約束條件為
通過優化求解得工作速度為2.14 km/h,對輥轉速為142 r/min,對輥間距為24.3 mm,對輥螺距為10 cm時,雙螺旋對輥式辣椒收獲裝置的作業效果最后,其模型預測采凈率為99%,破損率為3.37%。
2.4.2 驗證試驗
2020年9月在新疆巴州地區進行田間試驗驗證,試驗材料選取采收期內,打完脫葉劑2天后,辣椒莖稈含水率≤40%的色素辣椒。以工作速度2.1 km/h,對輥轉速142 r/min,對輥間距24.3 mm,對輥螺距10 cm,進行試驗,試驗現場如圖9所示。
每100 m間隔采收為一組試驗,共進行5次重復試驗驗證,對試驗結果取平均值得出,采凈率為98.7%,破損率為3.46%,與理論預測值絕對誤差值均低于1%,辣椒采收效果良好。
3 結 論
針對色素辣椒人工采收效率低,現有機型破損率高等問題,采用雙螺旋葉片安裝布置方式,研制了一種雙螺旋對輥式辣椒收獲裝置。
對采收過程和辣椒采收時的受力進行分析,確定了工作速度、對輥轉速、對輥間距和對輥螺距為影響采收效果的試驗因素,以采凈率和破損率為試驗指標進行試驗。
利用Design-expert 10軟件對試驗結果進行數據分析,得出最優參數后,選擇工作速度2.1 km/h,對輥轉速142 r/min,對輥間距24.3 mm,對輥螺距10 cm,進行驗證試驗,得到采凈率為98.7%,破損率為3.46%,采收效果良好。
[1] 馬金星. 色素辣椒機械收獲的現狀及發展建議[J]. 農村實用技術,2019(8):37-38.
Ma Jinxing. The current situation and development suggestions of mechanical harvesting of pigmented peppers[J]. Rural Practical Technology, 2019(8): 37-38. (in Chinese with English abstract)
[2] 丁皓,董陽陽,趙凱旋. 淺談色素辣椒收獲過程中收獲機械的選擇及其優缺點[J]. 河北農機,2019(6):21-22.
Ding Hao, Dong Yangyang, Zhao Kaixuan. Talking about the choice of harvesting machinery and its advantages and disadvantages in the process of harvesting pigment peppers[J]. Hebei Agricultural Machinery, 2019(6): 21-22. (in Chinese with English abstract)
[3] 薛世民,李謙緒,黃強斌,等. 影響辣椒機械化收獲效果的因素分析[J]. 新疆農機化,2020(4):9-11.
Xue Shimin, Li Qianxu, Huang Qiangbin, et al. Analysis of factors affecting the mechanized harvesting effect of pepper[J]. Xinjiang Agricultural Mechanization, 2020(4): 9-11. (in Chinese with English abstract)
[4] Bac C W, Roorda T, Reshef R, et al. Analysis of a motion planning problem for sweet pepper harvesting in a dense obstacle environment[J]. Biosyst. Eng. 2016, 146: 85-97.
[5] 張俊三,阿力木·買買提吐爾遜,李謙緒,等. 牧神4JZ-3600A型自走式辣椒收獲機的研制[J]. 新疆農機化,2020(3):5-7.
Zhang Junsan, Alimu·Maimaiti Tuerxun, Li Qianxu, et al. Development of Mushen 4JZ-3600A self-propelled pepper harvester[J]. Xinjiang Agricultural Mechanization, 2020(3): 5-7. (in Chinese with English abstract)
[6] 趙飛龍,趙永滿. 辣椒收獲機風機清選液壓系統的設計研究[J]. 新疆農機化,2019(4):18-19,23.
Zhao Feilong, Zhao Yongman. Design and research on the hydraulic system of the fan cleaning of the pepper harvester[J]. Xinjiang Agricultural Mechanization, 2019(4): 18-19, 23. (in Chinese with English abstract)
[7] 趙永滿,刁雪洋,陳永成,等. 辣椒收獲機復摘裝置的研究[J]. 農機化研究,2018,40(7):105-110.
Zhao Yongman, Diao Xueyang, Chen Yongcheng, et al. Research on the re-picking device of pepper harvester[J]. Journal of Agricultural Mechanization Research, 2018, 40(7): 105-110. (in Chinese with English abstract)
[8] 段以磊. 辣椒機械采摘損傷機理及試驗研究[D]. 石河子:石河子大學,2014.
Duan Yilei. Mechanical Picking Damage Mechanism and Experimental Research on Pepper[D]. Shihezi:Shihezi University, 2014. (in Chinese with English abstract)
[9] 雷明舉,王飛,王夢,等. 彈齒滾筒式辣椒采摘裝置性能的試驗研究[J]. 農機化研究,2018,40(5):142-146,152.
Lei Mingju, Wang Fei, Wang Meng, et al. Experimental study on the performance of spring-tooth drum pepper picking device[J]. Journal of Agricultural Mechanization Research, 2018, 40(5): 142-146, 152. (in Chinese with English abstract)
[10] 吳玲敏. 4LZ-3.0型自走式辣椒收獲機的工作原理及試驗研究[J]. 農機化研究,2017,39(11):136-139.
Wu Lingmin. The working principle and experimental research of 4LZ-3.0 self-propelled pepper harvester[J]. Journal of Agricultural Mechanization Research, 2017, 39(11): 136-139. (in Chinese with English abstract)
[11] Tae H K, Dae C K, Cho Y J. Performance comparison and evaluation of two small chili pepper harvester prototypes that attach to Walking Cultivators[J]. Applied Sciences, 2020, 10(7): 2570.
[12] 劉高,林蜀云,吳荻,等. 朝天椒收獲裝置的設計、分析與驗證[J]. 機械制造,2021,59(1):29-33,62.
Liu Gao, Lin Shuyun, Wu Di, et al. Design, analysis and verification of Chaotian pepper harvesting device[J]. Machinery Manufacturing, 2021, 59(1): 29-33, 62. (in Chinese with English abstract)
[13] 劉高,林蜀云,梁勇,等. 斜置雙螺旋梳指式辣椒收獲試驗臺設計[J]. 農機化研究,2020,42(8):133-137.
Liu Gao, Lin Shuyun, Liang Yong, et al. Design of an oblique double spiral comb-finger pepper harvesting test bench[J]. Journal of Agricultural Mechanization Research, 2020, 42(8): 133-137. (in Chinese with English abstract)
[14] 張敏,許東生. 線辣椒收獲機的設計與試驗[J]. 機械研究與應用,2019,32(6):103-105.
Zhang Min, Xu Dongsheng. The design and experiment of the line pepper harvester[J]. Mechanical Research and Application, 2019, 32(6): 103-105. (in Chinese with English abstract)
[15] 曹新芳. 螺旋振動自走式辣椒采收機的研究開發[J]. 時代農機,2018,45(4):199.
Cao Xinfang. Research and development of spiral vibration self-propelled pepper harvester[J]. Times Agricultural Machinery, 2018, 45(4): 199. (in Chinese with English abstract)
[16] Lee B K, Kam D H, Min B R, et al. A vision servo system for automated harvest of sweet pepper in korean greenhouse environment[J]. Applied Sciences, 2019, 9(12): 2395.
[17] 耿愛軍,楊建寧,張姬,等. 玉米摘穗收獲機械損傷影響因素分析[J]. 農業工程學報, 2016, 32(22):56-62.
Geng Aijun, Yang Jianning, Zhang Ji, et al. Analysis on influencing factors of corn ear picking and harvesting machinery damage[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32 (22): 56-62. (in Chinese with English abstract)
[18] 辛尚龍,趙武云,戴飛,等. 全膜雙壟溝播玉米穗莖兼收對行聯合收獲機的研制[J]. 農業工程學報,2018,34(4):21-28.
Xin Shanglong, Zhao Wuyun, Dai Fei, et al. Development of double ridge furrow sowing corn ear stem combine harvester [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(4): 21-28. (in Chinese with English abstract)
[19] 王勇,李建東,楊薇,等. 小麥種子物理特性參數測定及在播種機排種器設計中的應用[J]. 農業工程,2021,11(6):109-114.
Wang Yong, Li Jiandong, Yang Wei, et al. Determination of the physical properties of wheat seeds and their application in the design of planters and meters[J]. Agricultural Engineering, 2021, 11(6): 109-114. (in Chinese with English abstract)
[20] 李杞超. 舀勺式小粒徑蔬菜種子精量排種器機理分析與試驗研究[D]. 哈爾濱:東北農業大學,2020.
Li Qichao. Mechanism Analysis and Experimental Study of A Scoop Type Small Particle Size Vegetable Seed Precision Metering Device[D]. Harbin: Northeast Agricultural University, 2020. (in Chinese with English abstract)
[21] 戚江濤,蒙賀偉,李成松,等. 馬鈴薯收獲機的設計與研制[J]. 農機化研究,2018,40(2):124-127.
Qi Jiangtao, Meng Hewei, Li Chengsong, et al. Design and development of potato harvester[J]. Agricultural Mechanization Research, 2018, 40(2): 124-127. (in Chinese with English abstract)
[22] 呂金慶,孫玉凱,李季成,等. 立式有機肥螺旋撒肥裝置設計與試驗[J]. 農業工程學報,2020,36(24):19-28.
Lyu Jinqing, Sun Yukai, Li Jicheng, et al. Design and experiment of vertical organic fertilizer screw spreading device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(24): 19-28. (in Chinese with English abstract)
[23] 蔣德莉,陳學庚,顏利民,等. 隨動式殘膜回收機清雜系統作業參數優化[J]. 農業工程學報,2019,35(19):1-10.
Jiang Deli, Chen Xuegeng, Yan Limin, et al. Operational parameter optimization of the cleaning system of the follow-up residual film recovery machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(19): 1-10. (in Chinese with English abstract)
[24] 張秀花,趙慶龍,王澤河,等. 可調五輥式對蝦剝殼機剝殼參數優化試驗[J]. 農業工程學報,2016,32(15):247-254.
Zhang Xiuhua, Zhao Qinglong, Wang Zehe, et al. Optimization experiment on peeling parameters of adjustable five-roller prawn peeling machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(15): 247-254. (in Chinese with English abstract)
Design and experiment of double helix pair roller pepper harvesting device
Yuan Xiaowei1,2, Yang Shuangping2, Jin Ruocheng3※, Zhao Liwei3, Dao Erjicairen1, Zheng Nan3, Fu Wenping4
(1.841000; 2.830052; 3.841000; 4.841000)
Pigment pepper is a highly valued plant containing natural pigments, such as capsanthin and chili Rubin. Pepper production has been one of the largest vegetable industries in China. The total area of pepper planting in Xinjiang in 2018 was about 120 000 hm2, of which pigment pepper was about 106 000 hm2. Therefore, the output is likely to be reduced, if the pigmented pepper cannot be harvested in time by hand. It is highly urgent for the efficient and mechanized harvesting of pepper at present. Two types of pepper harvesting machinery included the comb tooth and spiral roller type. In the comb tooth type, an alternative comb tooth roller is placed horizontally to comb and pull pepper. This structure presents a high harvesting speed and high efficiency, but a high impurity rate was found in the pepper after harvesting, while it is easy to cause damage to the pepper. In the spiral roller type, two high-speed rotating spiral rollers generate a toggle force for pepper harvesting. This structure reduces the damage and impurity rate of peppers, but the harvesting efficiency is lower than that of comb tooth type. In this study, a new roller-type pepper harvesting device with a double helix pattern was designed for a higher harvesting efficiency, while low damage rate, thereby meeting the large production demand for pigmented peppers. The stress of pepper at the contact point of the spiral steel bar was also analyzed to determine the main factors of harvesting performance. The pigment pepper in Yanqi County of Xinjiang was used as the test object, where the moisture content was less than 40% after two days of being beaten with defoliant. A single factor test was carried out to explore the effect of each factor on the harvest performance, further to determine the significance range of influencing factors. A four-factor five-level orthogonal optimization was then conducted, where the removal and damage rates were taken as the experimental indexes, whereas, the working speed, roller speed, gap, and pitch as the experimental factors. A regression equation of each factor was achieved on the removal and damage rate, the primary and secondary order of influencing factors, as well as the interaction of each factor. The surface graph was analyzed to obtain the interaction of various factors. Design-expert 10 software was used to optimize the parameters, and the resulting parameters were then verified via the verification test. Optimal performance was achieved, when the working speed was 2.1 km/h, the roller speed was 142 r/min, the roller distance was 24.3 mm, and the roller pitch was 10 cm. A combination of parameters was that the removal rate was 98.7%, and the damage rate was 3.46%, meeting the field operation requirements of a pigment pepper harvester. This finding can provide a sound reference to design and optimize the pigmented pepper harvester.
agricultural machinery; design; experiments; pepper harvesting; helix pair roller
袁小偉,楊雙平,金若成,等. 雙螺旋對輥式辣椒收獲裝置的設計與試驗[J]. 農業工程學報,2021,37(15):1-9.doi:10.11975/j.issn.1002-6819.2021.15.001 http://www.tcsae.org
Yuan Xiaowei, Yang Shuangping, Jin Ruocheng, et al. Design and experiment of double helix pair roller pepper harvesting device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(15): 1-9. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.15.001 http://www.tcsae.org
2021-06-10
2021-08-01
新疆維吾爾自治區“天山青年計劃”項目(2019Q136);新疆維吾爾自治區自然基金基層項目(2021D01F30)
袁小偉,博士生,研究方向為農業機械工程。Email:ywei5199@163.com
金若成,高級工程師,研究方向為農業技術推廣。Email:404111390@qq.com
10.11975/j.issn.1002-6819.2021.15.001
S147.2
A
1002-6819(2021)-15-0001-09