基于工業機器人技術的多功能教學工作臺
2021-11-27 09:35:58邵海軍
科學技術創新 2021年31期
羅 濤 邵海軍
(九江職業技術學院,江西 九江 332007)
1 設計的背景
從20 世紀50 年代工業機器人的雛形開始到20 世紀末工業機器人技術的成熟,并具有視覺、觸覺和行走等多種功能,實現了高速化、高精度化、智能化,完成了實用化并向工業領域進行廣泛使用,目前在制造業已廣泛使用。
在現實企業生產過程中,工業機器人廣泛應用于碼垛搬運、裝配、分揀、噴漆、噴涂、拾料、包裝、沖壓連線、壓鑄、上下料、拋光打磨等領域,能夠適應高溫、高輻射、高危等工作崗位,受到了制造業企業的歡迎,代替人工完成一些特殊崗位。
工業機器人在職業教育教學中的三大主要應用:
(1)運動功能,即在可達空間內任意點的運動到達;
(2)信號交換及功能實現,即與其他設備進行信號交換,控制其他設備的開啟和關閉, 或被PLC 控制與其他設備一起實現功能;
(3)仿真及軌跡模擬,即通過仿真及軌跡模擬,研究機器人軌跡的可達性、CT 循環時間等。
目前, 國內已有部分高校或者職業技術學校配備了相應的柔性生產線教學設備, 例如大連理工大學的FMSRobot 實驗平臺,北京理工大學的智能制造實驗平臺,常州工業職業技術學院的可視化柔性制造系統實訓平臺, 蘇州市職業大學的數字化設計與制造技術訓練中心等, 但對智能制造實驗平臺大多數針對單一系統和單一課程教學所開發的智能制造實訓平臺, 不具有綜合性和包容性,無法滿足多種工業機器人系統和功能的集成。
針對工業機器人教育方式的單一化教學模式,為有效的推進教育行業的發展與進步, 工業機器人編程與操作一體化靈動課堂規避了市場上常見的以一個典型的機器人用途建一個工作站的弊端,特別適用于學生剛開始學習機器人,如果一開始就按機器人的用途去建,投入資金非常大,同時工作站實現的用途不一樣,老師組織教學非常不宜,學生也得不到充足的動手,綜合考慮我產品將工業機器人的多種用途(如:趣味運動(繪畫、彈琴、七橋板)、搬運、碼垛、分揀、運動抓取、焊接、噴涂、上下料、打磨等應用) 和多種工業機器人控制系統 (可選如:FANUC、ABB、YASKAWA、COMAU、KUKA、GSK 等)綜合開發,集中在一套機器人多功能教學系統中,便于教師組織一體化教學,大大降低了教學成本,能夠滿足廣大職業院校辦學需要。
2 核心技術
2.1 信號板卡
機器人與外圍設備的基礎通訊為16in/16out 數字輸入輸出板卡,板載光隔離輸入用電源為12VDC 240mA。為了保證快速響應,且響應時間低于200μ/sec.所有輸入通道都可作為中斷使用可用軟件設定數字濾波器和中斷觸發裝置,如圖1 所示。
圖1 信號板卡
2.2 機器人手爪
配合有氣動元器件的手爪,用來做帶有抓取動作的應用(搬運、分揀、碼垛、上下料、打磨等,可自由配置各種形狀和大小的裝載物;可通過多種多樣的抓手(選裝件),實現從小件到大件的各類搬運作業擁有大范圍的工作半徑的同時有效的控制了干涉空間,實現緊湊且靈活的機體設計。如圖2 所示。
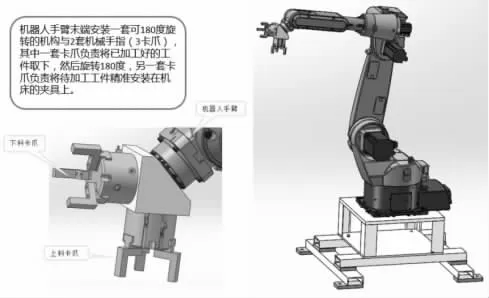
圖2 機器人手爪
2.3 機器人軌跡控制
帶有水性油漆筆的工具,用來做軌跡實訓,可以用在焊接和噴涂的前期學習, 機器人表面制造工具柜軌跡規劃方法研究首先對目前存在的機器人姿態控制方法與路徑規劃方法進行對比分析,針對研究對象為洗削加工,為滿足加工與使用要求,確定采用歐拉角插補方式實現機器人變姿態運動, 并以此方式實現空間直線、圓弧的軌跡插補算法,并且對機器人控制時遇到機器人工作范圍內奇異點導致逆運動學無解等問題通過采用隨機概率方法對機器人工作空間進行分析, 從而確定工件完備的工作位置。
3 多功能教學工作臺的特點
本多功能教學工作臺由工業機器人及控制系統、工具庫、氣動系統、物料庫、傳送帶、視覺系統、搬運工作臺、碼垛工作臺、打磨工作臺、焊接工作臺、綜合實訓臺、可編程邏輯控制器實訓單元、離線編程仿真單元及安全防護設施組成。如圖3 所示。

圖3 多功能教學工作臺
本多功能教學工作臺可以實現其基本結構認識、基礎操作實訓、參數配置聯系、在線示教編程實訓、簡單語言編程實訓的教學;結合工具庫、搬運工作臺、碼垛工作臺、打磨工作臺、焊接工作臺、綜合實訓臺實現工具更換、由簡單到復雜多種工藝應用的軌跡規劃、編程以及綜合實訓;利用所配的PLC 實訓單元實現工業機器人和模擬生產線的配合實訓;該產品應用工業機器人編程與操作一體化靈動課堂規避了市場上常見的以一個典型的機器人用途建一個工作站的弊端, 適用于學生剛開始學習機器人,工業機器人的多種用途(如:趣味運動(繪畫、彈琴、七橋板)、搬運、碼垛、分揀、運動抓取、焊接、噴涂、上下料、打磨等應用)和多種工業機器人控制系統(可選如:FANUC、ABB、YASKAWA、COMAU、KUKA、GSK 等)綜合開發,集中在一套機器人多功能教學系統中,便于教師組織一體化教學。
結束語
本多功能教學工作臺可以有效提高教育實體化與模擬化,將一體化教學環境、多種用途及多種工業機器人控制系統三者完美融合,大大加大了該方案的落地實施性。保證學生在面臨全球性競爭的形勢下教育有效化,提高實戰經驗。
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:50
裝備制造技術(2020年12期)2020-05-22 09:25:38
學生天地(2019年33期)2019-08-25 08:56:02
東方教育(2017年19期)2017-12-05 15:14:48
電子制作(2017年8期)2017-06-05 09:36:15
唐山文學(2016年2期)2017-01-15 14:03:59
信息記錄材料(2016年4期)2016-03-11 15:22:54
作文評點報·低幼版(2014年32期)2014-09-18 14:24:21
江蘇高職教育(2014年4期)2014-02-28 11:40:57
體育師友(2013年6期)2013-03-11 18:52:18