EnKF集合同化下黃海海霧數值確定性預報初始場構造方法的探究*
2021-11-27 06:23:56高山紅
海洋與湖沼 2021年6期
鄭 青 高山紅
EnKF集合同化下黃海海霧數值確定性預報初始場構造方法的探究*
鄭 青1, 2高山紅1, 2①
(1. 中國海洋大學海洋與大氣學院 青島 266100; 2. 中國海洋大學物理海洋教育部重點實驗室 青島 266100)
在黃海海霧的數值模擬中, EnKF (ensemble Kalman filter)是一種優于3DVAR (three- dimensional variational)的數據同化方法。研究發現, 對EnKF初始場集合體采取常用的集合平均所產生的確定性預報初始場, 會出現初始場中海霧在預報開始后就迅速消失以及接下來海霧難以生成的異常現象。通過詳細的海霧個例研究, 清晰地揭示并解釋了此現象, 指出這是集合平均造成初始場中云水與溫度濕度之間存在不協調關系所導致的后果, 并提出了一種擇優加權平均方法來取代常用的集合平均。研究結果表明, 海霧確定性預報采用擇優加權平均所構建的初始場, 可以消除上述異常現象, 顯著改進海霧模擬效果。
黃海海霧; EnKF集合同化; 確定性預報; 初始場; 變量協調性
海霧發生在海上大氣邊界層內, 其內部懸浮著的大量小液滴或小冰晶導致大氣水平能見度低于1 km (王彬華, 1983; Kora?in, 2017), 是我國近海主要海洋氣象災害之一。黃海是我國海霧頻發區之一(王彬華, 1983; Cho, 2000; Gao, 2007; 張蘇平等, 2008), 海霧引發的海上事故較多, 如青島近海50%左右的船舶碰撞和擱淺與海霧有關(張蘇平等, 2008), 因此海霧預報需求十分迫切。
中尺度大氣數值模式, 如WRF (weather research and forecasting)模式, 已經成為一種研究和預報黃海海霧的有力工具(高山紅等, 2010; 史得道等, 2016; 傅剛等, 2016)。海霧數值模擬效果取決于2個方面: 模式誤差與初始場誤差。盡管中尺度大氣數值模式已經相當成熟, 但對于海霧模擬而言, 仍存在很大的發展空間, 因為海霧形成與演變涉及湍流、輻射、氣溶膠與水汽相變等一系列復雜的模式無法完全刻畫清楚的動力與物理過程。很多海霧研究者針對這些過程, 分析了WRF模式對海霧的模擬效果, 例如: 比較了2種大氣邊界層(planetary boundary layer, PBL)方案: YSU (Yonsei University)與MYNN (Mellor-Yamada- Nakanishi-Niino) (陸雪等, 2014; 饒莉娟, 2014), 研究了在YSU方案中考慮霧頂長波冷卻所增強的輻射夾卷對海霧發展的作用(Yang, 2020), 嘗試了利用WRF-Chem (WRF model coupled with chemistry)探究復雜氣溶膠過程對海霧生成的影響(王彬, 2015; 王靜菊, 2017), 等等。這表明, 模式自身不斷完善需要一個長期的過程。然而, 由于海霧對初始場的高敏感性(Lewis, 2004; Kora?in, 2005a, b; Gao, 2007; Kora?in, 2017), 通過數據同化手段, 提高初始場質量從而改進海霧模擬效果是相對容易見效的。
3DVAR (three-dimensional variational)是黃海海霧數值模擬中常用的一種數據同化方法(高山紅等, 2010; 李冉等, 2012; Wang, 2014; 王靜菊等, 2017), 它采用了靜態背景誤差協方差(background error covariance, BEC)。它的同化效果, 不如采用動態BEC的EnKF (ensemble Kalman filter) (Gao, 2018)。由于EnKF同化過程中存在集合體, 可以在此基礎上直接進行海霧集合預報。鑒于模式誤差與初始場誤差始終存在的客觀事實, 理論上海霧集合預報優于確定性預報, 這已得到了實際模擬結果的支持(高山紅等, 2014)。但是, 限制于計算資源, 高時空分辨率的黃海海霧集合預報不易實現, 確定性預報仍然是目前主流方式。
采用比3DVAR優越的EnKF這種集合同化方法, 可以為海霧確定性預報提供高質量的初始場(Gao, 2018)。EnKF集合同化會產生一個初始場集合體, 通常簡單地將這個集合體進行平均(稱為集合平均)作為確定性預報的初始場。最近, 我們采用這種常用方式, 基于EnKF集合同化進行了黃海海霧確定性預報研究, 發現了一個不曾被已有研究提到的異常現象——初始場中的海霧隨著預報開始快速消失, 且在預報前幾個小時內難以生成。本文將以一次黃海海霧過程作為研究對象, 借助GSI (gridpoint statistical interpolation)-EnKF同化系統(Shao, 2016)和WRF模式, 詳細展現這個現象并分析它產生的原因, 試圖通過提出一種確定性預報初始場構造方法, 來消除這種現象并改進海霧預報效果。希冀本文研究工作, 為基于EnKF集合同化的黃海海霧確定性預報提供重要參考。
1 數據與海霧個例
1.1 數據
研究主要用到大氣再分析數據、常規觀測數據, 以及天氣分析圖、衛星可見光云圖及可見光反照率與紅外多通道亮溫數據。
ECMWF (European Centre for Medium-Range Weather Forecasts)提供的第五代逐時再分析數據(ECMWF reanalysis v5, ERA5)為數值試驗提供初邊值; 此數據水平分辨率0.25°×0.25°, 垂直共有37個氣壓層, 下載網址為https://cds.climate.copernicus.eu/ cdsapp#!/dataset/reanalysis-era5-pressure-levels?tab=overview。NEAR-GOOS (North East Asian Regional Global Ocean Observing System)發布的逐日海溫(sea surface temperature, SST)為數值試驗提供海洋驅動底邊界, 水平分辨率0.25°×0.25°, 下載網址為http://ds. data.jma.go.jp/gmd/goos/data/。數據同化與數值試驗結果檢驗中, 用到來自全球氣象數據通信系統(global telecommunication system, GTS)的常規觀測數據, 包含地面觀測(3 h/次)與探空觀測(12 h/次), 下載網址為https://rda.ucar.edu/datasets/ds337.0; 還有來自NEAR-GOOS的浮標數據, 下載網址為https://near- goos1.jodc.go.jp/。
海霧研究個例的挑選與霧區模擬結果的統計評分檢驗, 利用了逐時的Himawari-8衛星可見光云圖、可見光與紅外多通道數據, 它們分別來自日本氣象廳(Japan Meteorological Administration, JMA; 下載網址: http://222.195.136.24/satellite/cloud/mtsat_vis)與日本高知大學(水平分辨率為0.04°×0.04°, 下載網址: http://weather.is.kochi-u.ac.jp/sat/GAME)。另外, 海霧個例中天氣形勢的定性分析所用的天氣圖, 源自韓國氣象局(Korea Meteorological Administration, KMA, 下載網址: http://web.kma.go.kr/eng/index.jsp)。可見光衛星云圖來源于日本氣象廳(JMA; 下載網址: http:// 222.195.136.24/satellite/cloud/mtsat_vis)。
1.2 海霧個例
2018年4月18—20日(時間為世界時UTC, 下同), 黃海發生了1次霧區變化較快的海霧過程(記為case-2018)。基于白天可見光云圖(圖1a, 1b, 1e, 1f)與采用Gao等(2009)提出的判據, 基于多通道紅外數據利用雙通道法(Ellrod, 1995)反演的夜間海霧霧區(圖1c, 1d), 了解了此次海霧的發展過程。此外, 利用KMA地面天氣圖(圖略, 下載網址: http://web.kma.go. kr/eng/index.jsp), 分析了海霧發生時的天氣形勢。
根據圖1中的云圖紋理特征, 可知高壓系統控制下, 海霧伴隨少量低云首先在黃海南部形成(圖1a); 隨后海霧向北發展, 霧區呈半環狀分布(圖1b); 受偏東南風的影響(圖略), 海霧西北向移動, 占據了在黃海西北部海域(圖1c, 1d); 伴隨黃海上高壓系統逐漸增強(圖略), 海霧霧區進一步擴大(圖1e); 但隨著高壓向東南撤退(圖略), 海霧南部消散縮小, 僅出現在山東半島南部近海一帶(圖1f)。
2 數值試驗
2.1 模式設置
采用WRF模式(V3.9.1)進行海霧數值試驗。ERA5再分析數據與NEAR-GOOS的逐日SST數據為WRF模式提供初邊值條件。為了減少嵌套帶來的誤差, 模擬區域只設置了一層(圖2), 水平分辨率為10 km。模式其他設置, 如微物理方案、大氣邊界層(planetary boundary layer, PBL)方案與輻射方案等, 詳見表1。
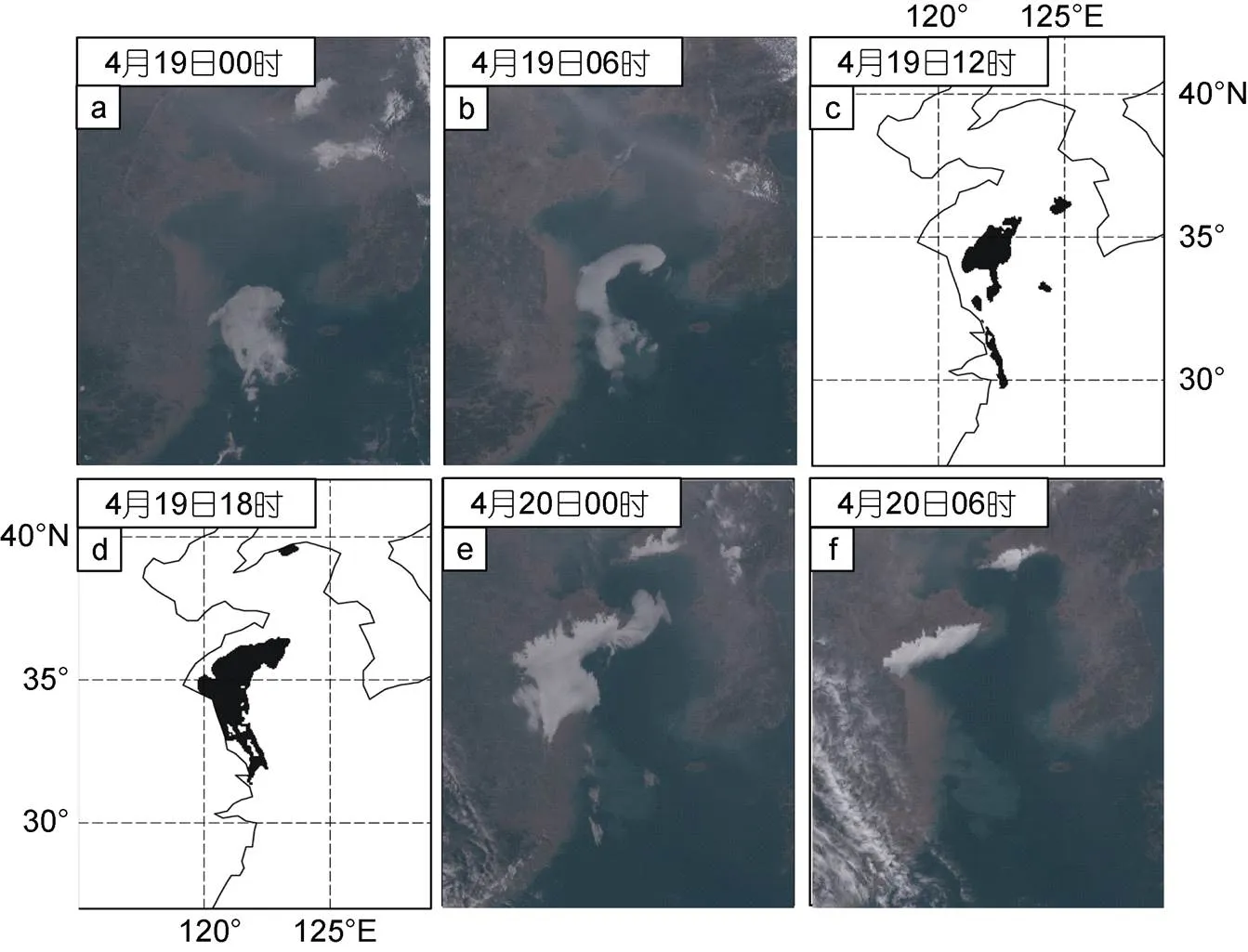
圖1 海霧case-2018的霧區演變觀測事實

圖2 WRF模式區域

2.2 試驗設計
海霧數值模擬不僅對初始場非常敏感(Lewis, 2004; 高山紅等, 2010), 還十分依賴于PBL方案。已有研究表明(陸雪等, 2014; 高山紅等, 2014), YSU方案與MYNN方案是2種比較適合海霧數值模擬的PBL方案, 但它們各有優缺點(饒莉娟, 2014)。在EnKF集合同化循環中, 需要積分已經選定好PBL方案的WRF, 這意味EnKF同化效果與PBL方案有關。
2.3 海霧快速消失現象
采用Wang等(2014)中提出的海霧全天候反演方法, 基于Himawari靜止衛星的紅外多通道亮溫與可見光反照率數據, 反演獲取逐時的海霧case-2018的霧區觀測事實(記為觀測霧區)。由于WRF模式不能直接預報霧區, 需要根據模式模擬的云水混合比(Qcloud, 簡記為c)進行霧區診斷(記為模擬霧區)。采取高山紅等(2010)提出的“鳥瞰”方式, 對于海上的某一模式水平點, 在其垂直層中自上而下找到c≥0.016 g/kg以確定霧頂的高度top; 因為top極少超過400 m (Zhou, 2010), 若top≤400 m, 則該水平點屬于模擬霧區, 且top為海霧厚度。
表1 WRF模式設置
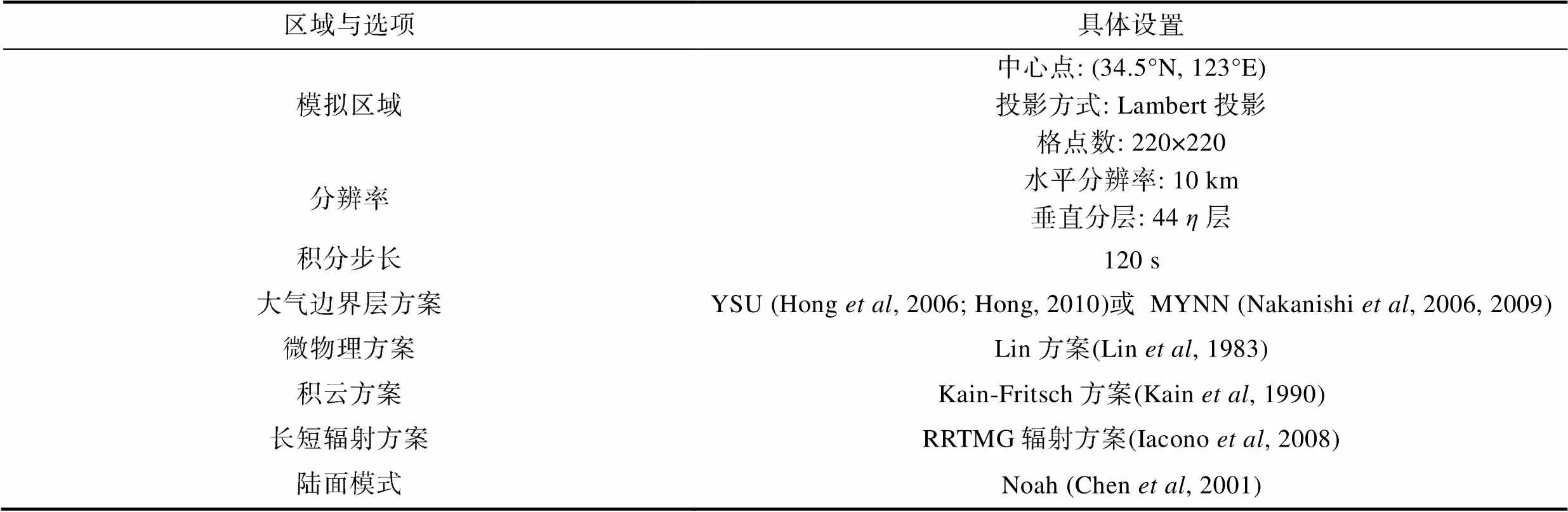
Tab.1 Specifications of the WRF model
注:=1.000 0, 0.997 5, 0.992 5, 0.985 0, 0.977 5, 0.970 0, 0.954 0, 0.934 0, 0.909 0, 0.880 0, 0.850 6, 0.821 2, 0.791 8, 0.762 5, 0.708 4, 0.657 3, 0.609 0, 0.563 4, 0.520 4, 0.479 8, 0.441 5, 0.405 5, 0.371 6, 0.339 7, 0.309 7, 0.281 5, 0.255 1, 0.230 3, 0.207 1, 0.185 4, 0.165 1, 0.146 1, 0.128 4, 0.111 8, 0.096 5, 0.082 2, 0.068 9, 0.056 6, 0.045 2, 0.034 6, 0.024 9, 0.015 9, 0.007 6, 0.000 0
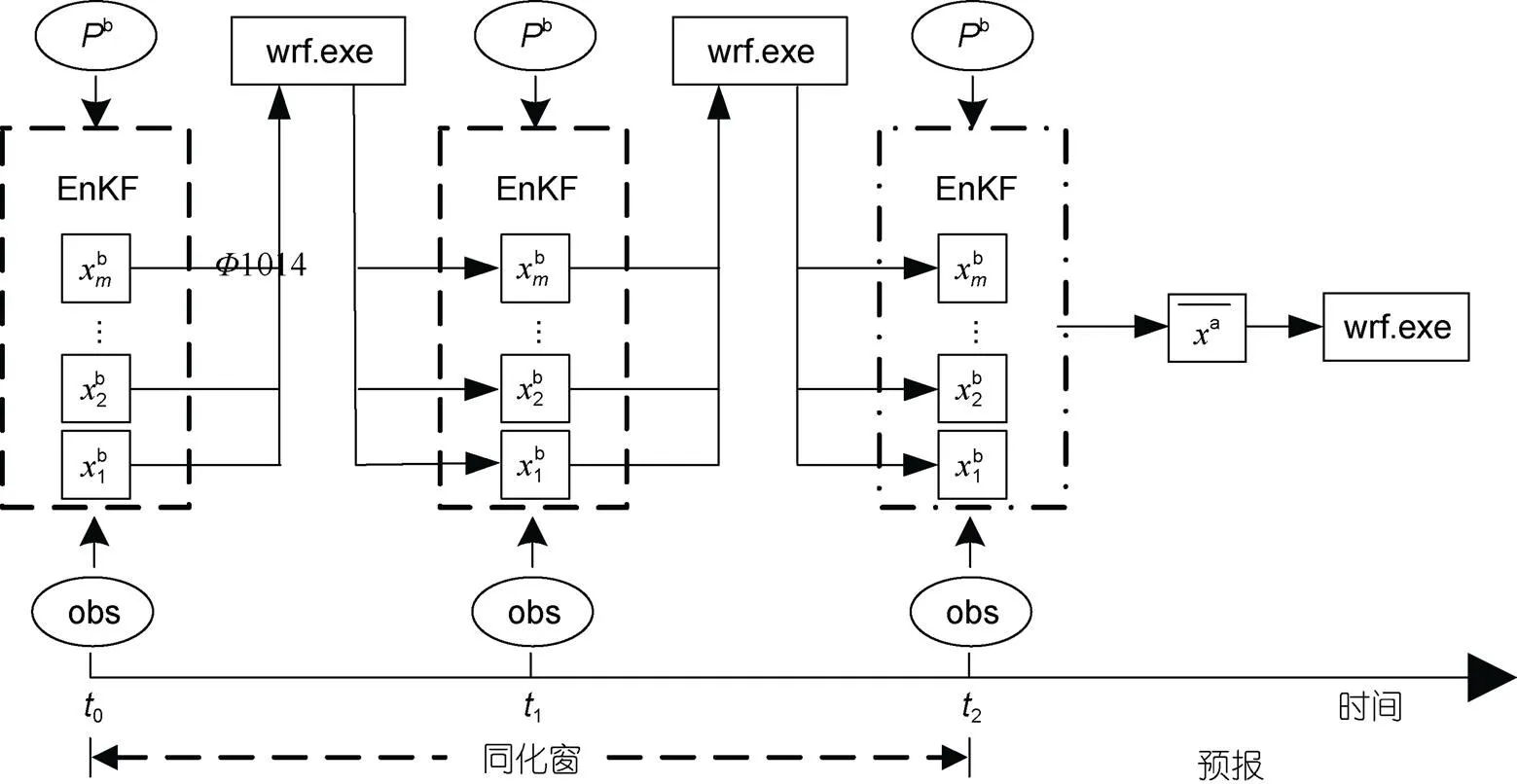
圖3 EnKF同化流程



Tab.2 Design of experiments on the sensitivity of sea fog simulation to
2.4 快速消失原因探究
在初始場時刻, 存在海霧的模式格點處的云水含量c≥0.016 g/kg, 隨著WRF模式積分, 海霧迅速消失后c肯定減小至0.016 g/kg之下。可以推斷,c變為了水汽(Qvapor, 簡記為v), 相對濕度(簡記為H)可能會有所增加。因此, 以海霧消失問題最為明顯的Exp-D為例, 我們來分析在WRF模式底層(海上10 m左右高度)的c,v,H與溫度, 在模式積分后所發生的變化。圖5對比了Exp-D的初始場與1 min預報場中這些量的差異(后者減去前者)。由圖5可以清楚地看出, 不同變量的差異在水平空間上的分布較為一致, 且范圍與初始場中的霧區基本一致(圖4中5時刻對應的Exp-D分圖); 但WRF僅積分1 min之后, 初始場中的海霧就完全消失了(對比圖5a與圖5b),c減小了0.016—0.080 g/kg (圖5c), 而v隨之增加了0.016—0.080 g/kg (圖5f),H增加的幅度不超過5%, 溫度卻下降了0.1—0.5 °C。


圖4 敏感性試驗的模擬霧區與觀測霧區

圖5 Exp-D初始場與模擬場在模式底層的分布及差異(模擬場減初始場)
注: 同一排的填色變量相同, 左、中、右列分別為初始場、積分1 min模擬場以及它們之間的差異
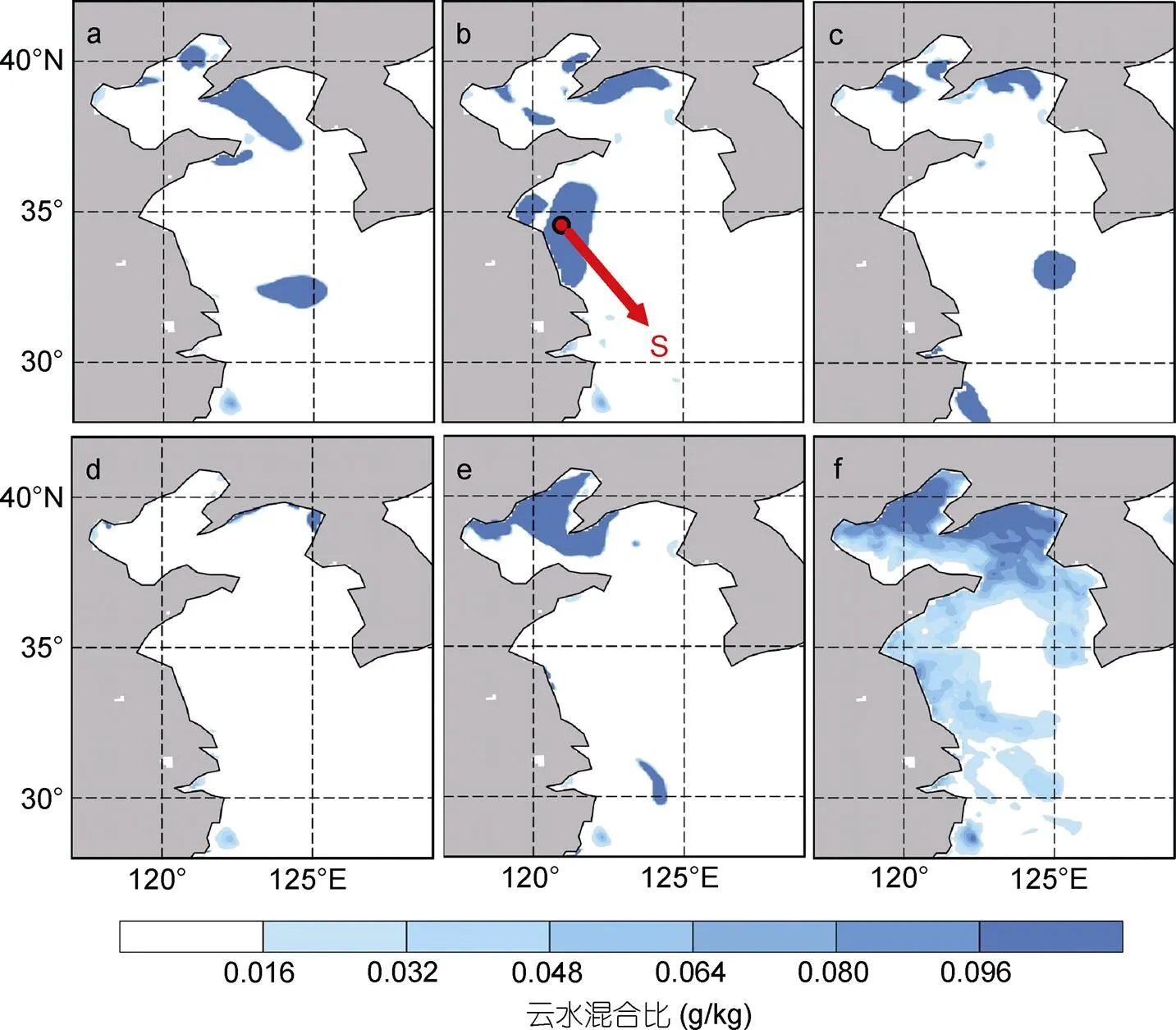
圖6 5名隨機成員(a—e)與集合平均(f)在模式底層的云水分布
注: S(34.6°N, 120.9°E)為觀測霧區內一點
3 初始場生成方法的改進
3.1 擇優加權平均

成員的擇優依據其模擬霧區與觀測霧區的吻合程度。模擬霧區與觀測霧區(它們的診斷方法詳見2.3節)都是格點化的結果, 可直接點對點比較。采用了下面4個客觀評分指標對吻合程度定量評估:
其中, POD (probability of detection)評分(式中記作POD)為模擬霧區的正報率(或擊中率); FAR (false alarm ratio)評分(式中記作FAR)為誤報率; Bias與ETS(equitable threat score)分別為霧區偏差評分(式中記作Bias)與公正預兆評分(式中記作ETS) (Doswell III, 1989; Zhou, 2010; Wang, 2014);為準確預報的點數目;為預報有霧的點數目;為觀測有霧的點數目;為隨機擊中項;為指定檢驗區域的所有點數。ETS同時考慮了POD, FAR與Bias, 是一個綜合評分指標。將ETS作為擇優加權平均中的權重系數, 設計了如下的擇優加權平均公式:
3.2 改進效果分析
3.2.1 海霧模擬霧區
圖8給出了擇優加權平均對比試驗Exp-D_S, Exp-D_W10與Exp-D_W20的模擬霧區與觀測霧區的對比結果。與Exp-D相比, 它們初始場中的海霧在WRF積分開始之后并沒有快速消失, 一直維持并發展(對比圖8與圖4第1排分圖), 與觀測霧區(圖8第1排分圖)的空間分布及變化趨勢基本一致。圖4顯示, Exp-D存在“海霧消失”現象, 6 h以后海霧才逐漸形成(圖4中7時刻對應的Exp-D分圖), 而擇優加權平均對比試驗中海霧一直存在(圖8)。
仔細對比試驗Exp-D_S, Exp-D_W10與Exp- D_W20的模擬霧區, 它們存在一定差異。根據它們的模擬結果, 發現Exp-D_S明顯劣于Exp-D_W10、Exp-D_W20。這初步顯示, 擇優條件會顯著影響海霧模擬效果。為了定量的評估這種影響, 統計了這些試驗的POD, FAR, Bias與ETS的評分及其改進率[Bias越接近1.0越好, 其改進率計算見公式(7)]。見表3。從表3可很清晰地看出, 相比于直接采用集合平均的試驗Exp-D, 所有擇優加強平均試驗都明顯勝出, 幾乎所有的統計評分都得到不同程度的改善(除了Exp-D_S中的FAR; FAR越小越好); 模擬霧區改進效果顯著, ETS評分至少提升了90.5%, 最高達到了141.3%。綜合比較表3中列出的各項評分, 試驗Exp-D_W10結果最優。這意味在構建試驗Exp-D_W10初始場的過程中, 初始場集合體40個成員中的36個被舍棄了, 只利用了剩下的4個成員, 就達到了很好的模擬效果。
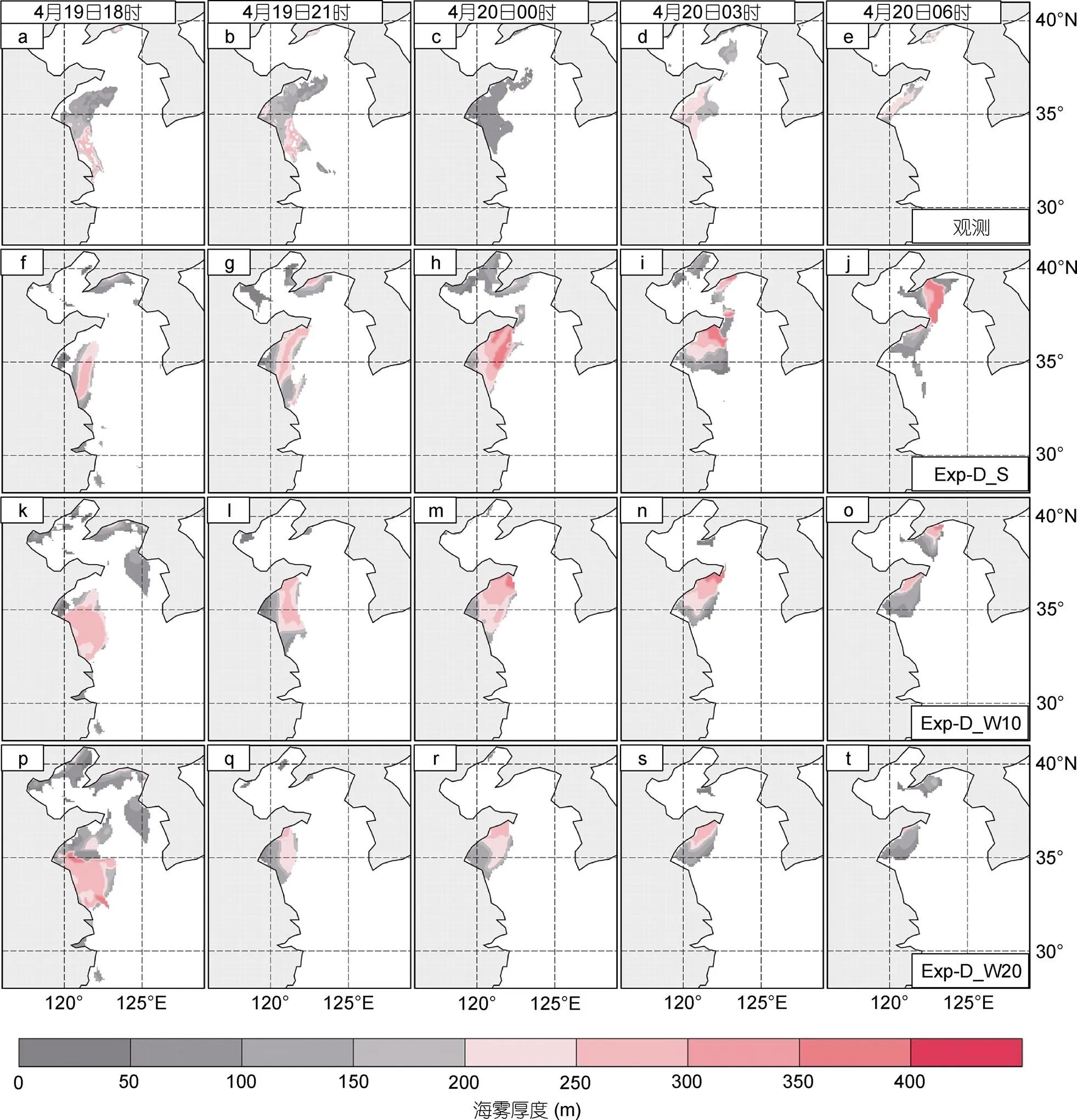
圖8 €擇優加權平均對比試驗與觀測霧區的比較
其中,Bias, i為Bias, 2相對于Bias, 1的改進率。
3.2.2 初始場協調性
表3中的各項評分顯示, 試驗Exp-D_S, Exp- D_W10, Exp-D_W20的模擬霧區明顯優于試驗Exp-D,它們初始場中模式底層的云水分布結果也是如此(圖9)。參考前面2.4節中的原因探究結果分析,這可能歸功于擇優加權平均生成的初始場中云水含量與溫濕變量之間比較協調, 不再是那種不利于海霧維持的“高溫低濕”的環境。為此, 我們針對涵蓋觀測霧區(圖9中打點區域)的一塊海域(圖9a中的實線方框所示), 統計了4個試驗Exp-D, Exp-D_S, Exp-D_W10與Exp-D_W20的初始場在此區域內模式底層的云水含量、氣溫、水汽混合比與相對濕度的平均值(圖10), 來考察初始場中云水含量與溫濕變量之間的協調性。在圖10中, 試驗Exp-D體現出非常明顯的“高溫低濕”特征(圖10a, 10c, 10d為低濕, 圖10b為高溫); 而其余3個擇優加權平均試驗卻沒有這種“高溫低濕”的特征, 而是相反的“低溫高濕”特征。這個統計結果清晰顯示, 擇優加權平均較好地給出了有利于初始場中海霧維持所需的云水含量與溫濕變量之間的匹配關系。
表3 擇優加權平均對比試驗的霧區統計評分

Tab.3 The statistical score of each item in different fog forecast sensitivity experiments by using the preferred-weighted average
注: POD為模擬霧區的正報率(或擊中率); FAR為誤報率; Bias與ETS分別為霧區偏差與公正預兆評分; 各評分為預報時段內逐時評分的平均結果, 括號內粗體數字代表相對于試驗Exp-D的改進率
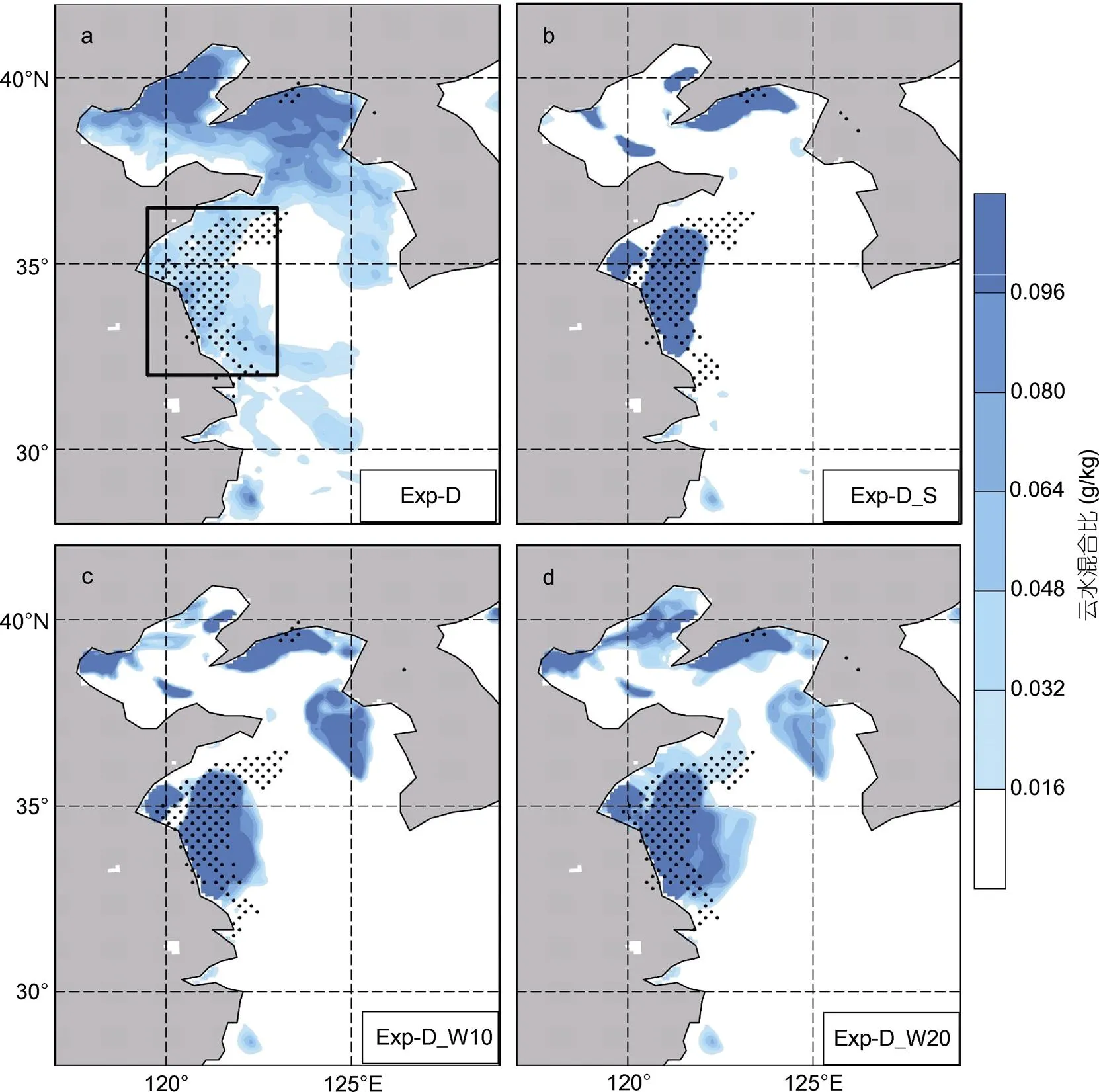
圖9 擇優加權平均對比試驗初始場中模式底層云水分布
注: 打點區域為觀測霧區范圍; a中黑色框為選定區域平均范圍

圖10 擇優加權平均對比試驗與Exp-D云水與溫濕值在模式底層區域平均值的比較
為了探究Exp-D_W10最優的原因, 我們對比了擇優加權平均對比試驗的初始場差異。相比于Exp-D_W10與Exp-D_W20, Exp-D_S在渤海區域的濕度較高(圖略), 這導致了大塊虛假霧區的存在(圖8f—8j), Bias與FAR分別達到了1.49與0.50 (表3)。Exp-D_W20因為擇優的成員較多, 納入了一些霧區吻合度不高的成員, 導致“低溫高濕”的特征不如Exp-D_W10, POD降至0.52 (表3)。Exp-D_W10的“低溫高濕”區域與觀測霧區范圍較為吻合, 其POD略低于Exp-D_S的POD (兩者分別為0.63與0.70; 表3), 但其Bias接近1.0且FAR較小(兩者分別為0.93與0.28; 表3); 這表明Exp-D_W10優于Exp-D_S, 主要歸功于虛假霧區的大幅減少。
初始場中的協調性是否有助于改善海上大氣邊界層內的溫濕垂直結構, 從而改善海霧預報?以Exp-D與Exp-D_W10為例, 利用青島站與射陽站(見圖2中的QD與SY)的探空觀測, 評估了6 h預報時刻的海上大氣邊界層內溫濕垂直結構。圖11給出了溫度與水汽混合比的偏差(bias)與均方根誤差(RMSE)垂直廓線。與Exp-D相比, Exp-D_W10在925 hPa以下的溫度與水汽混合比的bias與RMSE明顯偏小, 這表明它的溫濕狀態更靠近實際狀態, 這應該是Exp-D_W10初始場協調性優于Exp-D所帶來的益處。
3.3 方法應用與驗證

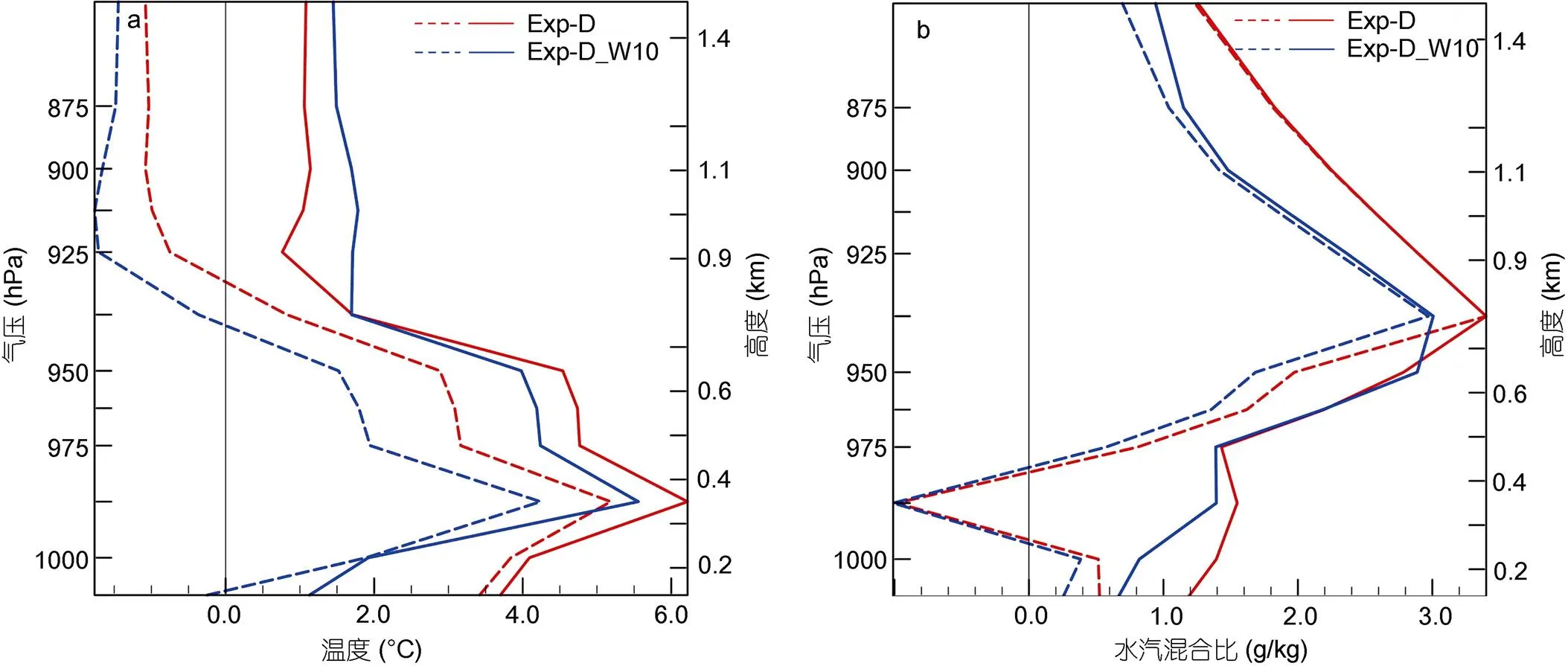
圖11 模式6-h模擬與探空之間均方根誤差RMSE (實線)和偏差bias (虛線)的垂直分布
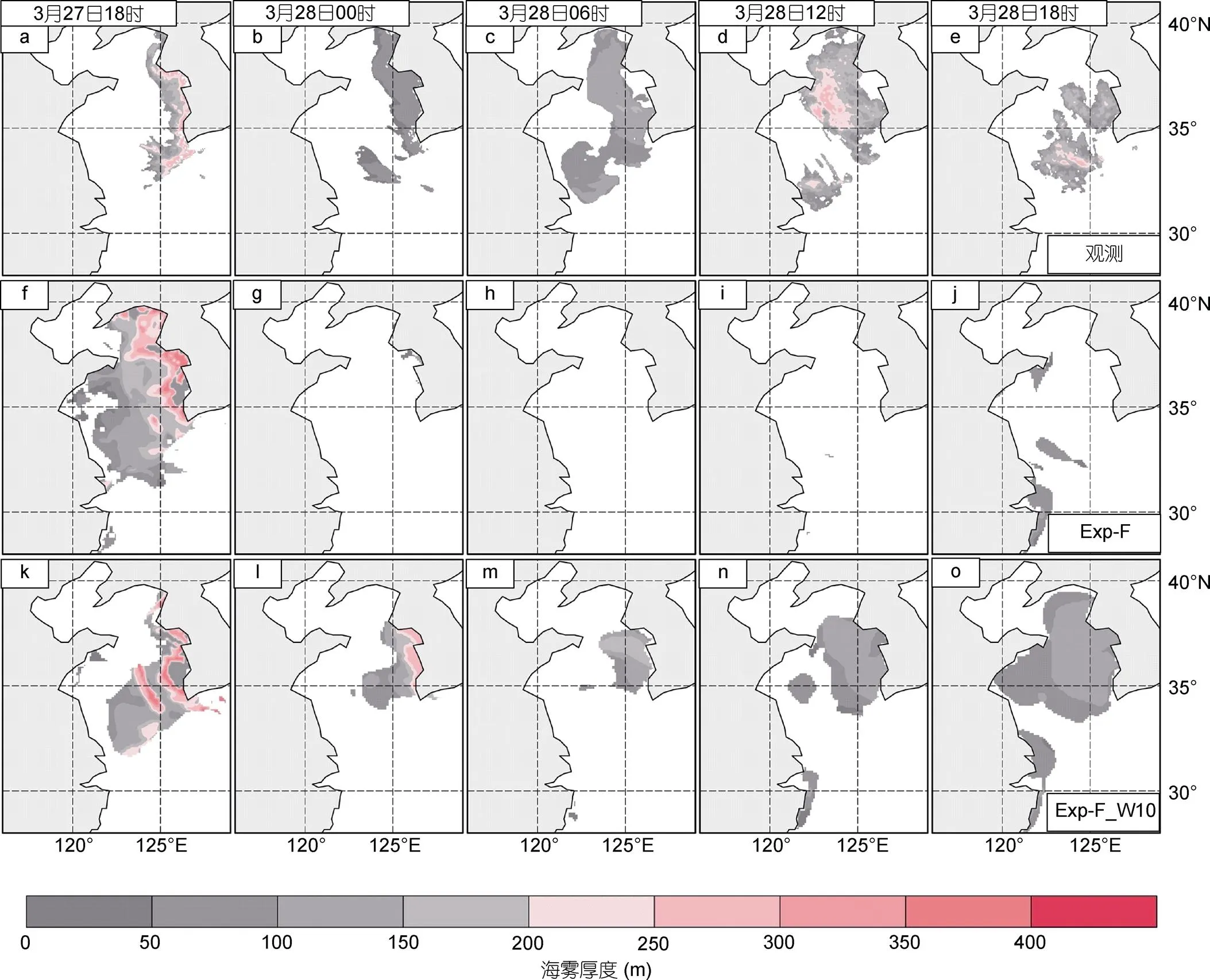
圖12 數值實驗Exp-F和Exp-F_W10的模擬霧區與觀測霧區的比較
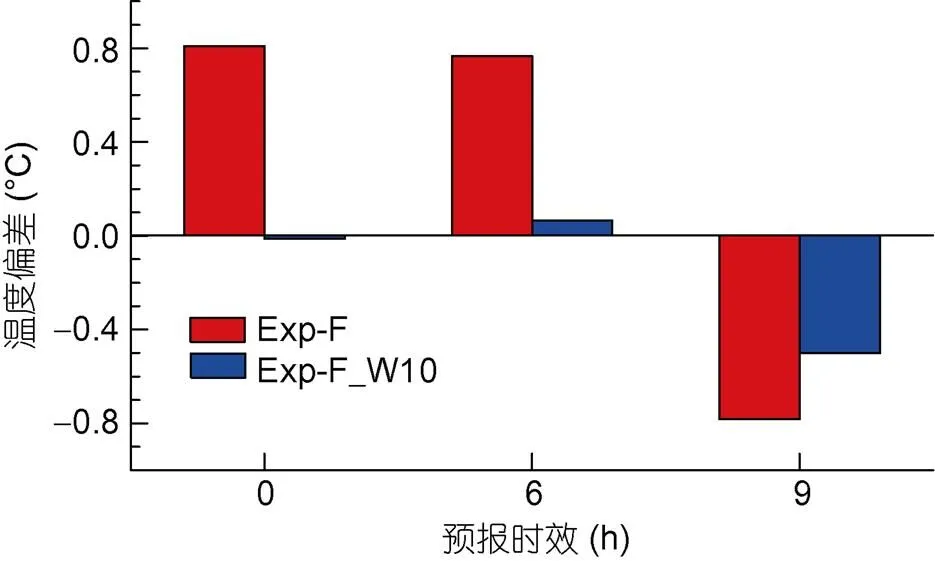
圖13 Exp-F_W10模擬的海面氣溫與浮標觀測之間的偏差
4 結論與展望
數據同化在黃海海霧數值模擬與預報中至關重要(高山紅等, 2010; Kora?in, 2017)。在實際海霧數值業務預報中, 數據同化窗內已經發生海霧這種情形較為常見, 因此如何在同化中植入海霧觀測信息尤其關鍵(Wang, 2014; Gao, 2018)。因為預報初始場中出現的海霧, 由于霧頂長波輻射冷卻會造成霧頂夾卷作用變化, 將對海霧的后續發展產生不可忽視的影響(Yang, 2020)。倘若出現初始場中的海霧在模式開始積分后不能得以維持的現象, 那么數據同化的效果就會大打折扣。我們發現, 基于EnKF集合同化生成黃海海霧確定性預報的初始場, 如果采用常用的集合平均來獲取, 就會導致這個現象的出現。因此, 通過對一次黃海海霧的細致數值研究, 本文不僅清楚地揭示與解釋了這個現象, 而且還提出了一種能消除這種現象的初始場構建方法——擇優加權平均, 并在另外一次海霧個例確定性預報中得到了應用驗證。基于已有研究結果, 得到如下結論:
(1) 針對EnKF集合同化得到的初始場集合體, 采用常用的集合平均來生成確定性預報初始場, 不適用于海霧數值模擬。集合平均不僅造成初始場中存在較多的虛假霧區, 而且使得初始場中云水含量與溫濕變量之間存在不協調, 造成有利于海霧維持的“低溫高濕”由于集合平均而變為“高溫低濕”, 導致初始場中已出現的海霧在模式開始積分后就快速消失。
(2) 擇優加權平均明顯優于集合平均, 它構建的初始場中, 虛假霧區明顯減少, 霧區內的云水含量與溫濕變量彼此較為協調。擇優加權平均構建的初始場充分繼承了優秀成員的霧區分布與溫濕結構特征, 避免了出現集合平均所造成的“高溫低濕”后果, 從而大幅提升了海霧預報評分。
本文提出的擇優加權平均初始場構建方法, 簡單易行, 對海霧短臨近預報效果改善顯著, 可應用于海霧業務化預報*Himawari-8靜止衛星原始數據的獲取約滯后30 min, 利用其反演海霧不超過3 min。在擁有52核處理器的計算平臺中, 進行3 h同化間隔6 h同化窗的循環集合同化(40個集合成員), 僅需數分鐘。。然而, 此方法還需要更多海霧個例的檢驗, 擇優過程仍存在很大的改進余地。譬如, 目前成員的篩選, 僅僅只是依據初始場時刻的模擬霧區與觀測霧區的吻合度, 如果加入更多的篩選條件(如與沿岸探空與地面觀測中溫濕等變量的偏差程度)可能會更好, 這是我們下一步亟須開展的工作。此外, 雖然擇優加權平均聚焦于確定性預報, 其實它對海霧的集合預報也有借鑒作用。因為它可以在集合預報開始之前就排除一些較差的成員, 從而降低集合預報的計算資源需求; 或者將節約下來的計算資源分配到EnKF集合同化中, 使它有能力考慮更多的集合成員而改善集合體離散度, 從而改進接下來的集合預報效果。
王彬華, 1983. 海霧. 北京: 海洋出版社, 352
王 彬, 2015. 海霧與陸霧數值模擬中氣溶膠作用的對比研究. 青島: 中國海洋大學碩士學位論文, 18—28
王靜菊, 2017. 黃海海霧的AIRS數據同化與氣溶膠效應研究. 青島: 中國海洋大學碩士學位論文, 20—30
王靜菊, 高小雨, 高山紅, 2017. 一次黃海海霧的數據同化試驗與形成機制研究. 海洋氣象學報, 37(1): 42—53
史得道, 吳振玲, 高山紅等, 2016. 海霧預報研究綜述. 氣象科技進展, 6(2): 49—55
李 冉, 高山紅, 王永明, 2012. 直接同化衛星輻射數據的黃海海霧數值試驗研究. 中國海洋大學學報, 42(3): 10—20
楊 悅, 高山紅, 2016. 黃海海霧WRF數值模擬中垂直分辨率的敏感性研究. 氣象學報, 74(6): 974—988
陸 雪, 高山紅, 饒莉娟等, 2014. 春季黃海海霧WRF參數化方案敏感性研究. 應用氣象學報, 25(3): 312—320
張蘇平, 鮑獻文, 2008. 近十年中國海霧研究進展. 中國海洋大學學報, 38(3): 359—366
郭敬天, 2008. 海霧形成與發展機制的觀測分析與數值模擬研究. 青島: 中國海洋大學博士學位論文, 46—47
饒莉娟, 2014. YSU與MYNN邊界層方案的黃海海霧模擬效果比較. 青島: 中國海洋大學碩士學位論文, 31—48
高山紅, 王永明, 傅 剛, 2014. 一次黃海海霧的集合預報試驗. 中國海洋大學學報, 44(12): 1—11
高山紅, 齊伊玲, 張守寶等, 2010. 利用循環3DVAR改進黃海海霧數值模擬初始場Ⅰ: WRF數值試驗. 中國海洋大學學報, 40(10): 1—9
傅 剛, 李鵬遠, 張蘇平等, 2016. 中國海霧研究簡要回顧. 氣象科技進展, 6(2): 20—28
Barker D M, Huang W, Guo Y R, 2004. A three-dimensional variational data assimilation system for MM5: implementation and initial results. Monthly Weather Review, 132(4): 897—914
Chen F, Dudhia J, 2001. Coupling an advanced land surface-hydrology model with the Penn State-NCAR MM5 modeling system. Part I: model implementation and sensitivity. Monthly Weather Review, 129(4): 569—585
Cho Y K, Kim M O, Kim B C, 2000. Sea fog around the Korean peninsula. Journal of Applied Meteorology and Climatology, 39(12): 2473—2479
Dong L, Zhang F Q, 2016. OBEST: An observation-based ensemble subsetting technique for tropical cyclone track prediction. Weather and Forecasting, 31(1): 57—70
Doswell III C A, Flueck J A, 1989. Forecasting and verifying in a field research project: DOPLIGHT ’87. Weather and Forecasting, 4(2): 97—109
Ellrod G P, 1995. Advances in the detection and analysis of fog at night using GOES multispectral infrared imagery. Weather and Forecasting, 10(3): 606—619
Gao X Y, Gao S H, Yang Y, 2018. A comparison between 3DVAR and EnKF for data assimilation effects on the Yellow Sea fog forecast. Atmosphere, 9: 346
Gao S H, Lin H, Shen B, 2007. A heavy sea fog event over the Yellow Sea in March 2005: analysis and numerical modeling. Advances in Atmospheric Sciences, 24(1): 65—81
Gao S H, Wu W, Zhu L L, 2009. Detection of nighttime sea fog/stratus over the Huanghai Sea using MTSAT-1R IR data. Acta Oceanologica Sinica, 28(2): 23—35
Hong S Y, 2010. A new stable boundary-layer mixing scheme and its impact on the simulated East Asian summer monsoon. Quarterly Journal of the Royal Meteorological Society, 136(651): 1481—1496
Hong S Y, Noh Y, Dudhia J, 2006. A new vertical diffusion package with an explicit treatment of entrainment processes. Monthly Weather Review, 134(9): 2318—2341
Iacono M J, Delamere J S, Mlawer E J, 2008. Radiative forcing by long-lived greenhouse gases: calculations with the AER radiative transfer models. Journal of Geophysical Research: Atmospheres, 113(D13): D13103
Kain J S, Fritsch J M, 1990. A one-dimensional entraining/detraining plume model and its application in convective parameterization. Journal of the Atmospheric Sciences, 47(23): 2784—2802
Kora?in D, Businger J A, Dorman C E, 2005a. Formation, evolution, and dissipation of coastal sea fog. Boundary-Layer Meteorology, 117(3): 447—478
Kora?in D, Dorman C E, 2017. Marine Fog. Cham, Switzerland: Springer, 537
Lewis J M, Kora?in D, Redmond K T, 2004. Sea fog research in the United Kingdom and United States: a historical essay including outlook. Bulletin of the American Meteorological Society, 85(3): 395—408
Lin Y L, Farley R D, Orville H D, 1983. Bulk parameterization of the snow field in a cloud model. Journal of Applied Meteorology and Climatology, 22(6): 1065—1092
Nakanishi M, Niino H, 2006. An improved Mellor-Yamada level-3 model: its numerical stability and application to a regional prediction of advection fog. Boundary-Layer Meteorology, 119(2): 397—407
Nakanishi M, Niino H, 2009. Development of an improved turbulence closure model for the atmospheric boundary layer. Journal of the Meteorological Society of Japan, 87(5): 895—912
Qi L B, Yu H, Chen P Y, 2014. Selective ensemble-mean technique for tropical cyclone track forecast by using ensemble prediction systems. Quarterly Journal of the Royal Meteorological Society, 140(680): 805—813
Shao H, Derber J, Huang X Y, 2016. Bridging research to operations transitions: status and plans of community GSI. Bulletin of the American Meteorological Society, 97(8): 1427—1440
Wang X G, Barker D M, Snyder C, 2008a. A hybrid ETKF-3DVAR data assimilation scheme for the WRF model. Part I: observing system simulation experiment. Monthly Weather Review, 136(12): 5116—5131
Wang X G, Barker D M, Snyder C, 2008b. A hybrid ETKF-3DVAR data assimilation scheme for the WRF model. Part II: real observation experiments. Monthly Weather Review, 136(12): 5132—5147
Wang Y M, Gao S H, Fu G, 2014. Assimilating MTSAT-derived humidity in nowcasting sea fog over the Yellow Sea. Weather and Forecasting, 29(2): 205—225
Yang Y, Gao S H, 2020. The impact of turbulent diffusion driven by fog-top cooling on sea fog development. Journal of Geophysical Research: Atmospheres, 125(4): e2019JD031562
Zhou B B, Du J, 2010. Fog prediction from a multimodel mesoscale ensemble prediction system. Weather and Forecasting, 25(1): 303—322
CONSTRUCTION OF INITIAL FIELD FOR NUMERICAL FORECAST OF THE YELLOW SEA FOG BASED ON ENKF DATA ASSIMILATION
ZHENG Qing1, 2, GAO Shan-Hong1, 2
(1. College of Oceanic and Atmospheric Sciences, Ocean University of China, Qingdao 266100, China; 2. Key Laboratory of Physical Oceanography, Ocean University of China, Qingdao 266100, China)
In the numerical simulation of sea fog over the Yellow Sea, the EnKF (ensemble Kalman filter) is a data assimilation method superior to 3DVAR (three-dimensional variational). However, an abnormal phenomenon is that sea fog in the initial field disappears quickly after forecasting and it is difficult to generate subsequently when using common ensemble average method with which the initial field for deterministic forecast with EnKF data assimilation can be constructed. By a case study of sea fog, the phenomenon was clearly explained to be resulted from the inconsistent relationship among cloud water, temperature, and humidity in the initial field constructed by ensemble average, to which a new method was proposed using preferred-weighted-average to replace the ensemble average. It is shown that the deterministic forecast of sea fog base on the new method could eliminate the abnormal phenomena, and consequently improve the sea fog forecasting considerably.
the Yellow Sea fog; EnKF (ensemble Kalman filter); deterministic forecast; initial field; coordination of variables
P732.2
10.11693/hyhz20210300065
*國家重點研發計劃重點專項, 2017YFC1404200號; 國家自然科學基金, 42075069號; 山東省重點研發計劃項目, 2019GSF111066號。鄭 青, 碩士研究生, E-mail: zq551379@outlook.com
高山紅, 教授, E-mail: gaosh@ouc.edu.cn
2021-03-09,
2021-04-13