基于雷視融合的高速公路智能巡檢機器人預警系統研究
2021-11-27 11:54:23劉博
機電信息 2021年28期
關鍵詞:視頻

摘 要:以機器人為載體,搭建了雷達、視頻融合的高速公路異物與異常事件監測系統,利用雷達較強的抗干擾能力,結合視頻實現探測場景的可視化,實現高速公路的全天候監測。
關鍵詞:巡檢機器人;高速公路護欄;雷達;視頻
0? ? 引言
針對高速公路路面可能出現的異物或異常事件,需要一種可靠的監測方式。目前,基于視頻圖像的監控技術已廣泛應用于高速公路監控當中。但受限于建設成本,視頻監控依然存在相當大的盲區間隔,且易受天氣、光照等外界因素干擾[1]。本文以自主研發的高速公路智能監測預警機器人為載體,如圖1所示,搭建了雷達、視頻融合的高速公路異物與異常事件監測系統,利用雷達較強的抗干擾能力,結合視頻實現探測場景的可視化,實現高速公路異常事件的全天候監測。
1? ? 基于雷達的路面異物識別
相較于毫米波雷達,激光雷達具有精度高、測量距離遠等優勢[2],適合本項目的高速公路監測場景。針對激光雷達,根據其發射線束的多少,有單線、多線之分,其中多線又可以分為4~128線等多種規格,不同的線束可以收集的信息不同,對應的工作場景也不同。從技術成熟度來說,單線雷達相較于多線雷達在角頻率及靈敏度上反應更快速,且具有較高的可靠性。多線雷達是由于車路協同無人駕駛等領域的興起而逐漸發展起來的,從系統性能需求與使用場景來看,多線雷達在壽命與穩定性上還有所欠缺,這使得其在復雜的高速公路環境中的使用效果大打折扣[3]。
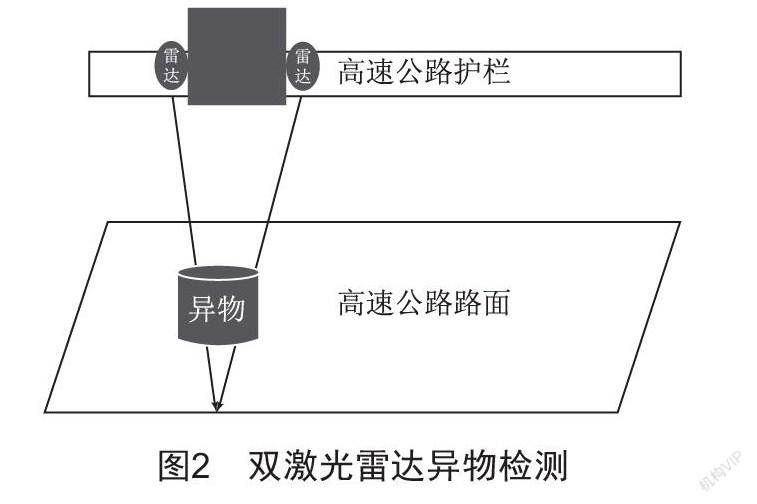
為保證物體距離與尺寸的測量精度,并保證異物的識別效率與準確性,本項目提出了一種基于雙激光雷達的測量方法。基本原理圖如圖2所示,機器人在行車方向兩側各設置一個激光雷達,并調節安裝角度,使兩個激光雷達聚焦于遠端路側,激光掃描范圍覆蓋整個檢測路面。在測量過程中,兩個單線激光雷達同時掃描,并錯開其頻率,從而變相提高檢測頻率。
將激光雷達實測數據進行擬合并在三維坐標系中重構。
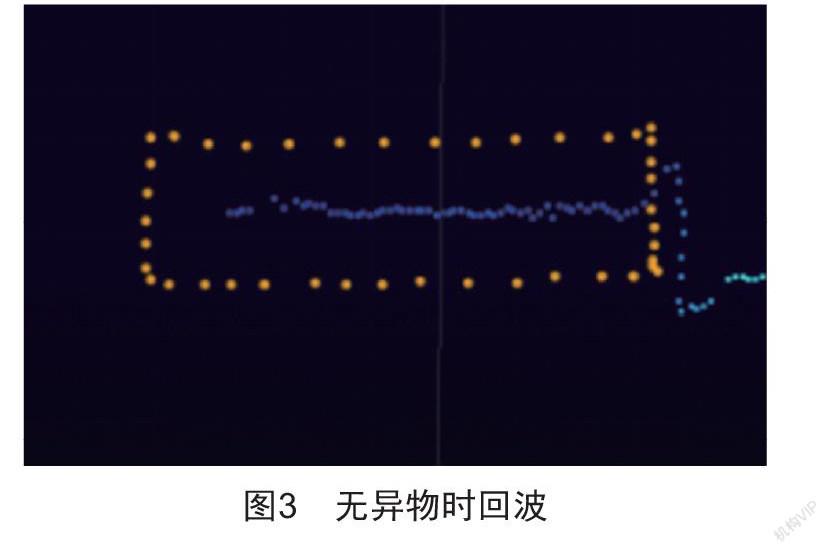
當機器人行進過程中,路面正常無異物時,在不考慮車輛遮擋的情況下,雷達的回波在圖像上的反映如圖3所示。從雷達的回波圖像上來看,當路面無異物時,基本只呈現出路面水平線與護欄輪廓線。
當機器人行進過程中,路面有異物時,在不考慮車輛遮擋的情況下,雷達的回波在圖像上的反映如圖4所示。可以看出在雷達對路面進行掃描的過程中,由于異物遮擋,雷達回波呈現凸起,并且可以根據凸起的點云坐標計算出測量的異物高度。通過兩側激光雷達同時掃描,可以提高異物檢測的成功率。
由于本項目選取30 Hz單線激光雷達,在機器人行進過程中,對于同一異物,無法完全呈現異物輪廓,需要根據雷達異物數據的回波數據大概推測出異物在行車方向上的尺寸。
基于上述雷達回波圖像特征,可以檢測到異物的速度、距離、角度等方位信息,并以此為主要依據來判斷當前路面是否有異物存在。
2? ? 雷達與視頻融合系統
該系統不僅可以對異物信息進行充分的描述,還可以通過雷達與視頻之間數據的互相驗證,剔除虛假或無關信息,提高系統的魯棒性。
雷達系統已在上一節詳細描述。首先將雷達探測得到的目標位置轉化為視覺系統坐標。根據相關標準,護欄相對于路面的位置是基本一致的,這就使得在機器人安裝之后進行簡單的傳感器位置標定,即可確定坐標轉化的公式。
由于本系統面對的環境中有車輛信息干擾,針對此類情況,考慮車輛與異物尺寸在Z軸高度上差異較大,因此在監測到異常事件后進行Z坐標尺寸識別,如果識別結果判定為車輛高度信息并且相對速度接近于機器人巡檢速度,則進行車輛違停信息報警。主控板接收到報警信號可通過音頻與報警燈等方式通知車主盡快駛離現場,并控制高清球機針對檢測位置進行準確對焦,通過多種形式(攝像、照相以及定時攝像與定時照相)進行圖像采集,并采用圖像識別算法,對已采集的圖像素材進行圖像分割、圖像特征提取、圖像識別,進而實現準確的車牌識別;圖片原始文件會跟隨記錄進行關聯保存,以便后期查閱。
3? ? 軟件實現
雷達與視頻融合系統中視頻圖像監測處理軟件模塊是實現以上功能的重要組成部分,其軟件功能主要擬實現視野范圍內道路安全威脅目標的探測,內容包括:(1)圖像預處理模塊設計與實現;(2)道路前景/背景分離算法設計與實現;(3)算法軟件移植、集成及測試。
軟件整體界面如圖5所示,具有視頻查看、設備狀態監測、機器人運行控制、報警信息顯示等功能。
3.1? ? 視頻查看
視頻查看區域可以顯示攝像機實時視頻畫面,“上移”“下移” “左移” “右移”按鈕可以控制攝像機云臺做相應動作,“復位”按鈕可控制攝像機處于初始位置,“+”和“-”按鈕可以調整攝像機焦距,“回放”按鈕可以查看歷史視頻。
3.2? ? 報警信息顯示
雷達數據監測區域顯示雷達實時數據,橫坐標為距離信息,縱坐標為高度信息。橫坐標為路面至護欄的水平距離,當路面出現異物時,通過橫坐標可以判斷異物所處位置與護欄的水平距離,進一步確定異物處于行車道還是超車道;縱坐標為異物高度信息,路面出現異物時,通過縱坐標可以判斷異物的高度,進一步判斷異物是否影響正常行車。雷達檢測到路面異物時,觸發攝像機進行抓拍,抓拍圖像信息在異物報警區域顯示,同時顯示抓拍的日期和時間、異物所處的位置,提醒道路管理人員及時處理。另外,通過“查看更多”按鈕,管理人員可以查看歷史異物報警信息。
4? ? 結語
本文針對高速公路巡檢的應用場景,設計了一種基于雷達、視頻融合的異物與異常事件監測系統,并開發了配套的識別軟件,應用于高速公路智能監測預警機器人中,有助于提高交通行業的智能化水平,減少人員投入,有效降低成本,提升運營效率,升級行業效能,從而構建智慧交通綜合解決方案。
[參考文獻]
[1] 陳釗正,張善關,杜飛,等.基于視頻圖像檢測的高速公路車型分道行駛監測系統[J].科學技術與工程,2021,21(9):3682-3688.
[2] 劉兆倫,周明,周延,等.超聲波雷達、毫米波雷達與激光雷達數據融合的研究[J].機械工程與自動化,2021(2):17-18.
[3] 郭新民.面向多傳感器數據融合的雷達顯控終端的設計方法[J].雷達與對抗,2016,36(4):53-55.
收稿日期:2021-08-05
作者簡介:劉博(1988—),男,山西太原人,工學碩士,高級工程師,研究方向:機械工程。
猜你喜歡
藝術與設計·理論(2016年4期)2017-01-16 02:06:32
中國新通信(2016年22期)2017-01-13 09:47:47
亞太教育(2016年33期)2016-12-19 04:44:01
考試周刊(2016年94期)2016-12-12 13:10:56
中國記者(2016年9期)2016-12-05 02:24:38
科技視界(2016年25期)2016-11-25 08:45:10
新媒體研究(2016年19期)2016-11-18 20:01:10
電腦知識與技術(2016年25期)2016-11-16 13:03:34
讀寫算·素質教育論壇(2016年22期)2016-11-14 07:35:17
電子技術與軟件工程(2016年18期)2016-11-14 00:01:37
