機載多維度SAR誤差分析與成像自配準處理方法 *
2021-11-29 09:18:22仇曉蘭焦澤坤周良將丁赤飚1
雷達科學與技術 2021年5期
仇曉蘭, 程 遙, 高 銘, 焦澤坤, 周良將, 丁赤飚1,3,4,
(1. 微波成像技術國家重點實驗室, 北京 100190; 2. 蘇州市空天大數據智能應用技術重點實驗室, 江蘇蘇州 215124; 3. 蘇州空天信息研究院, 江蘇蘇州 215124; 4. 齊魯空天信息研究院, 山東濟南 250132; 5. 中國科學院空天信息創新研究院, 北京 100190; 6. 中國科學院大學, 北京 100049)
0 引言
多維度SAR(Multidimensional Space Joint-observation SAR,MSJosSAR)是指能在極化、頻率、角度和時相空間中的至少兩個空間內,分別獲得多個觀測量集合的SAR系統[1]。隨著SAR系統技術的發展,多維度SAR乃至全息SAR[2]已經成為SAR的重要發展趨勢之一。
在星載SAR方面,SIR-C/X-SAR[3]具有L、C、X三個波段,其中L、C為全極化SAR,其可認為是國際上第一個航天多維度SAR系統。近年來,隨著極端天氣現象頻發,對全球植被監測等方面的需求愈加迫切,Boerner等科學家呼吁各國聯合發展圍繞赤道地區進行觀測的多波段全極化星載SAR系統[4]。此外,UrtheCast公司計劃構建SAR-XL系統,包括兩個波段、全極化觀測,從而提供和探索更多的應用[5]。在機載SAR方面,美國的AIRSAR、P3/SAR、MB-SAR、ECOSAR,德國的E-SAR、F-SAR等都具備多維度SAR數據的獲取能力[6]。中國科學院空天信息創新研究院牽頭研制了一部機載多維度SAR系統,其包括P、L、S、C、X、Ka六個波段全極化SAR,其中C和Ka具備雙天線極化干涉能力,并且該機載多維度SAR采用統一的頻率源作為基準源,通過一體化設計保證不同波段雷達之間在時間、相位方面的一致性,希望真正在統一的多維空間中對SAR目標特性進行獲取、分析和描述。目前該多維度SAR系統于2020年10月在敦煌開展了集成校飛,獲得了一系列多維度SAR數據。
多維度SAR數據的成像處理是后續進一步分析和應用的基礎。為了使得不同波段不同極化的數據能在統一的多維空間坐標系下分析,圖像之間的精確配準非常有必要。在多波段SAR圖像配準方面,現有研究大多是關于成像之后進行圖像配準的方法,主要包括基于灰度的方法、基于變換域的方法和基于特征的方法等[7]。文獻[8]提出了一種結合閾值分割和改進SIFT描述子的配準方法,在多個波段實驗中獲得了良好的配準效果;文獻[9]提出了一種基于仿射尺度不變和稀疏去斑的多波段SAR圖像配準方法,多波段SAR圖像的實驗結果表明所提方法的有效性。文獻[10]提出了一種基于邊緣特征的多波段SAR圖像配準方法,文獻[11]使用了一種相位相關匹配算法,并在X波段和C波段進行了配準實驗;文獻[12]提出了一種基于尺度預估的相位相關配準算法,先用尺度預估計方法實現初步配準,再利用局部搜索方法實現進一步配準。
雖然SAR圖像配準的方法已有很多且發展相對成熟,但其對于本文多維度SAR數據的處理并不合適。首先,成像之后進行圖像配準需要進行插值重采樣,難免會帶來幅度和相位的精度損失;其次,在復雜場景下,不同波段的散射特性差異顯著,圖像匹配的方法可能難以找到同名點,會導致匹配錯誤,影響后續分析結果。為此,進行多維度SAR數據的成像自配準非常有必要。所謂成像自配準,是指在各個波段SAR數據的成像過程中,通過合理的處理方式,使得地表上相同地物點投影到各個波段SAR成像平面后位于相同的圖像像素內,同時需要保持成像結果在聚焦、輻射、相位等方面的正確性。目前,據我們所知,尚未有關于多維度SAR不同波段數據成像自配準的研究報道。
已有關于成像自配準的相關研究,主要面向干涉/重軌干涉SAR處理,可以提供一定的借鑒。文獻[13]提出了一種非線性距離向ECS自配準成像算法,通過對兩天線路程差進行非線性近似,在成像過程中實現了干涉圖像在距離向的高精度自配準。文獻[14]提出了一種基于擴展波數域的機載雙天線干涉SAR自配準成像算法,同樣實現了距離向的高精度自配準。文獻[15]提出了一種基于BP的自配準處理方法,利用BP算法逐點成像的特點在成像過程中實現了干涉圖像對的高精度配準。然而,干涉SAR與多維度SAR系統成像自配準面臨的問題不盡相同:干涉SAR是一發雙收或者同一部SAR多次航過,系統的波段、帶寬等參數是相同的;而本文多維度SAR的自配準成像則還面臨系統參數不同等新的問題。實驗室前期工作[16]針對機載多波段SAR圖像配準問題進行了殘余運動誤差對配準精度影響的理論分析,但由于當時系統尚未研制完成,并未開展實際數據的驗證,也并未考慮實際系統中的系統參數誤差。
為此,本文針對機載多維度SAR系統的多波段SAR數據成像自配準問題,結合實際系統的參數和航跡特點,開展了誤差影響定量化分析,在此基礎上提出了誤差校正和成像自配準的處理方法,并給出了實際數據處理結果,驗證了分析的正確性和處理方法的有效性。
本文后續內容安排如下:第1節介紹了機載多維度SAR系統的基本參數,并建立了成像的數學模型;第2節對系統誤差進行了梳理,并對誤差造成的影響進行了定量化分析;第3節給出了自配準成像的方法和流程;第4節給出了機載多維度SAR在敦煌地區飛行實驗數據的處理結果;第5節總結全文并進行展望。
1 機載多維度SAR系統簡介與成像模型
1.1 機載多維度SAR系統簡介
本文所述的機載多維度SAR系統共包括6個波段,然而在本次集成校飛試驗中,Ka波段SAR在波束指向方面存在一些問題,為此本文主要介紹P、L、S、C、X共5個波段SAR的基本情況和處理情況。表1為各個波段SAR的基本參數,圖1為各個波段SAR天線安裝位置的示意圖,圖2為SAR天線安裝的實物圖,圖3為該多維度SAR系統的飛行平臺。
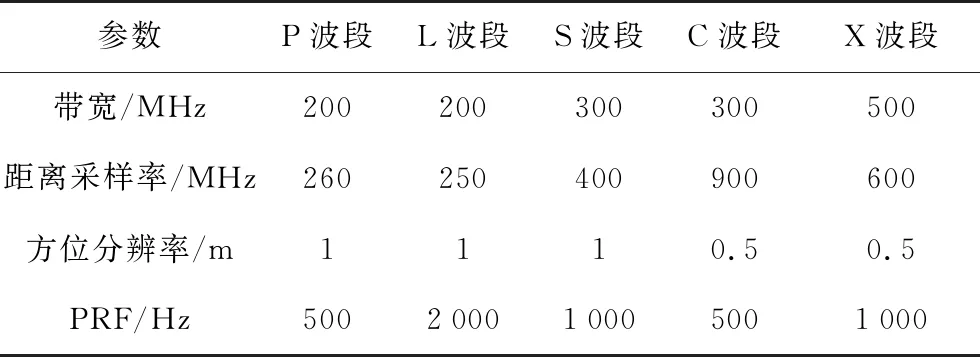
表1 各波段SAR基本參數
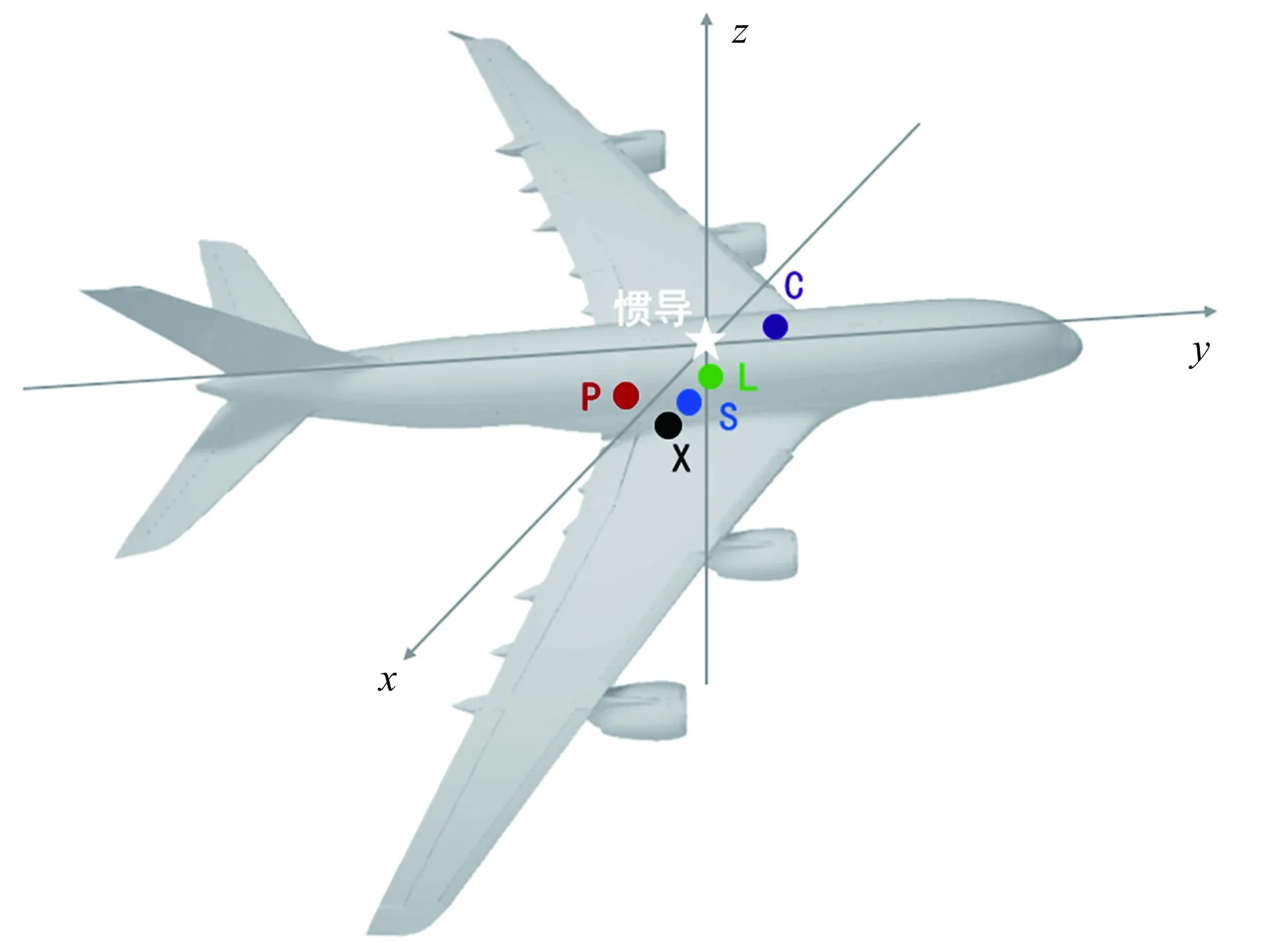
圖1 各波段SAR天線安裝位置示意圖

圖2 SAR天線安裝實物圖

圖3 多維度SAR載機平臺
在上述系統中,如以慣導的位置為坐標原點,以飛行方向為y方向、垂直地面方向為z方向,各個波段SAR天線相位中心與慣導的相對位置關系如表2所示。
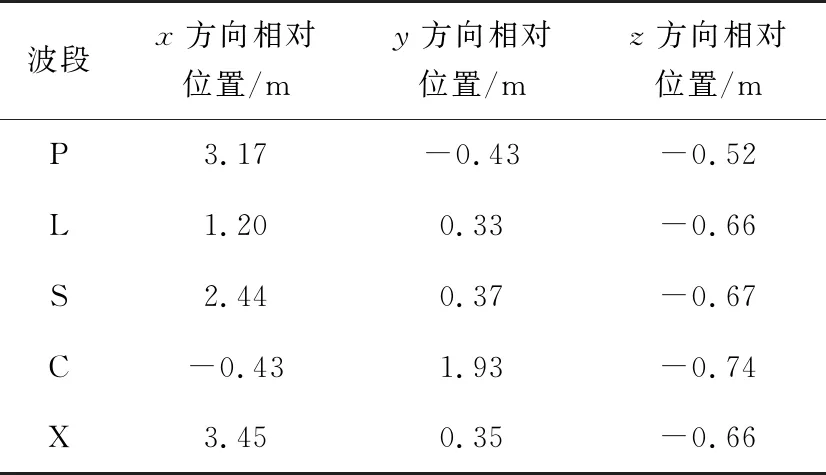
表2 各波段SAR與慣導之間的相對位置關系
1.2 機載多維度SAR成像模型
機載多維度SAR系統中,每個波段SAR的成像模型與普通的機載SAR成像模型無異,只是不同波段SAR成像模型需建立在一個統一的坐標系下,并且為了便于成像自配準,參考航跡采用嚴格平行的直線。本文中,我們以垂直地平面的方向為z軸,以成像時間內慣導測量得到航跡的平均高度平面為原點所在的平面,以在該平面中成像中心時刻慣導所在位置為坐標原點,以在該平面中擬合的沿著飛行方向的直線為y軸,該平面中垂直飛行方向的直線為x軸。以X波段SAR為例,設其為波段1,則如圖4所示,在參考坐標系中,波段1的SAR在方位0時刻的位置為(Δx10,Δy10,Δz10)。
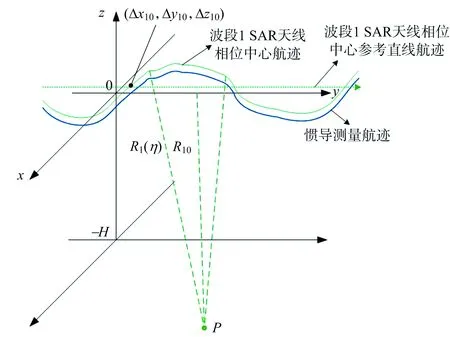
圖4 波段1參考直線航跡的位置

(1)
式中,A0為P點的復散射系數,τ為距離時間,η為方位時間,ηc為波束中心照射P點的時間,wr(τ)為距離包絡,wa(η)為方位包絡,f1為波段1中心頻率,Kr為距離調頻率,R1p(η)是P點與該波段SAR天線相位中心在η時刻的距離:
(2)

在成像過程中,如果采用同樣的參考直線進行運動補償,將能夠簡化自配準的處理過程,但是會使得有些波段SAR的運動誤差過大,不利于聚焦。為此對于每個波段SAR而言,應采用各自的參考直線進行運動補償,如波段1的SAR的參考直線為l1:[Δx10,Δy10+Vη,H+Δz10]。
2 面向自匹配的多維度SAR成像誤差分析
2.1 影響因素
在上述回波模型中,會引起成像失配的因素可分為參數不同導致的失配和誤差導致的失配兩個方面,如表3所示。
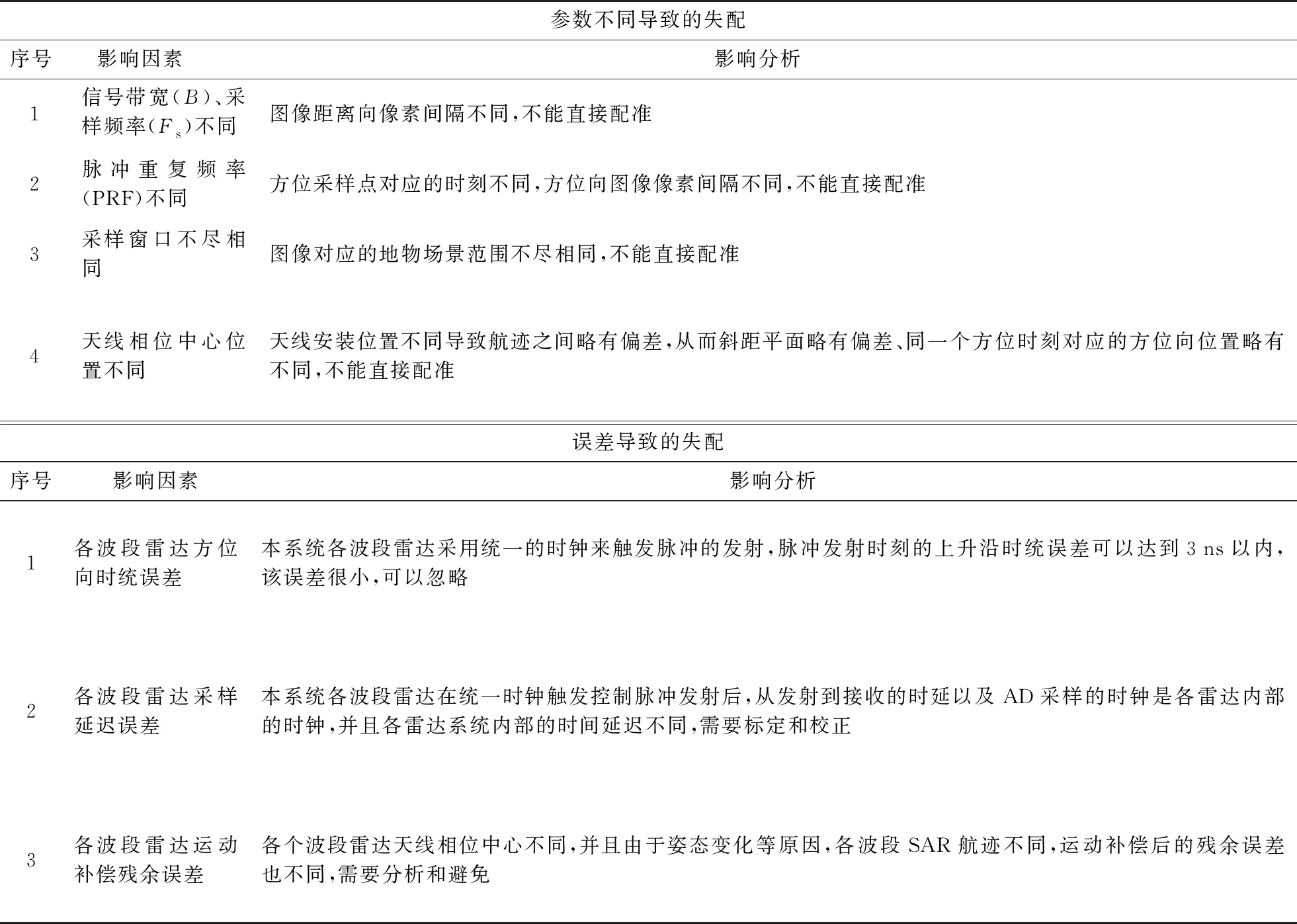
表3 影響因素分析
上述表格給出了引起成像失配的參數差異原因和誤差原因,其中參數差異需要在成像處理過程中進行一致化處理,而誤差則需要進行定量化分析和校正。
2.2 采樣延遲誤差分析
各波段雷達采樣延遲誤差首先需要進行標定,本系統中各波段雷達均有內定標回路,可通過采集內定標信號標定采樣延遲修正值。通過處理與分析,各個系統的采樣延遲修正值的相對值如表4所示,可見,如不進行標校,會存在斜距上±30 m左右的偏差,導致失配。
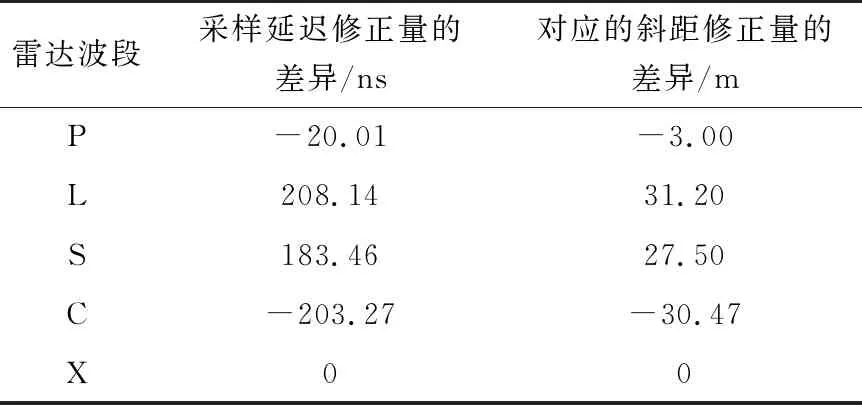
表4 各波段SAR采樣延遲誤差修正量
2.3 天線相位中心不一致引起的方位偏移
由于各個波段SAR的天線安裝在不同的位置,并且由于姿態變化的原因,相同的方位時刻各波段天線相位中心位置是不同的,并且相對關系是時變的,其中沿方位向的位置差異將導致方位向的像素偏移,需要進行計算和校正。在本次實驗中,方位向的起始位置偏差如表5所示。
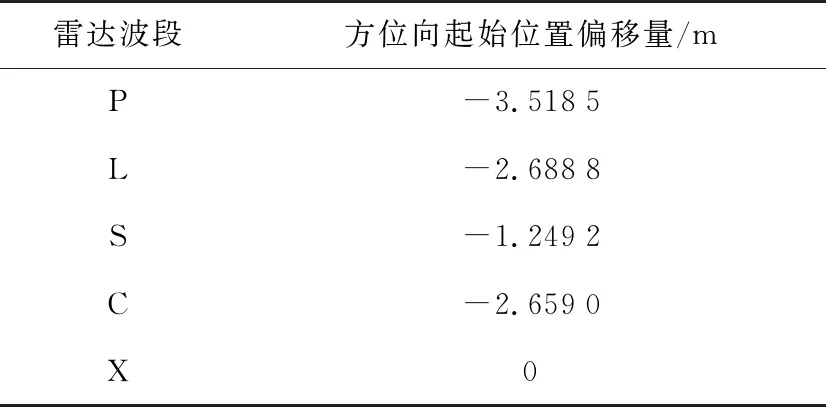
表5 各波段SAR方位向起始位置相對偏移量
2.4 殘余運動誤差分析
由文獻[17]可知,存在運動誤差和參考高程誤差時,運動補償殘余誤差受二者共同影響,殘余誤差公式如式(3)所示:
ΔRres(η)≈
(3)
式中,ΔRres(η)為運動補償殘余誤差,(Δx(η),0,Δz(η))為相對于參考直線航跡的運動誤差,其中y方向為零,是考慮到進行方位向重采樣后該方向誤差較小,he為考察的目標點實際高程與成像參考高程之間誤差,φ為目標點處的雷達視角,α(η)為雷達照射目標的方位向波束角。
本次集成校飛試驗中,各個波段SAR的飛行航跡如圖5所示,在x方向上采用了各自的參考基準,如圖5(a)所示,而由于高度向的變化較小,參考的理想航跡采用了統一的高度,如圖5(b)所示。
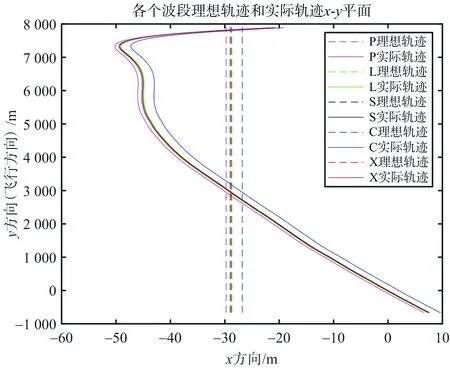
(a) x-y平面內的飛行航跡
(b) y-z平面內的飛行航跡圖5 各波段SAR的飛行航跡
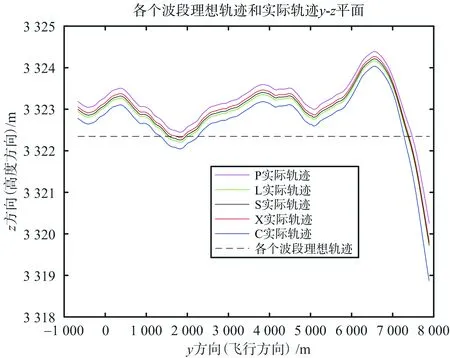
在成像處理過程中,采用一步運補[18]的方法,對每個距離門的目標采用參考高程下對應的運動誤差來進行補償。為了分析運動補償殘余誤差的大小,圖6~圖8給出了成像距離向中心處不同方位位置目標在不同參考高程誤差下的合成孔徑時間內的運補殘余誤差曲線,并分析引入的成像位置偏移量。
根據上述的運動補償殘余誤差,可以進行常數項和線性項的擬合,從而得到殘余誤差引入的斜距誤差和中心頻率誤差,進而分析其導致的成像后距離向和方位向像素偏差[19-20],如式(4)所示,分析結果如圖9所示。
(4)
式中,
(5)
fr為所考察目標點的調頻斜率,ΔRres0為ΔRres(η)的常數項,fs為成像時采用的距離向采樣頻率。
圖6 參考高程無誤差下不同方位向目標的運補殘余誤差
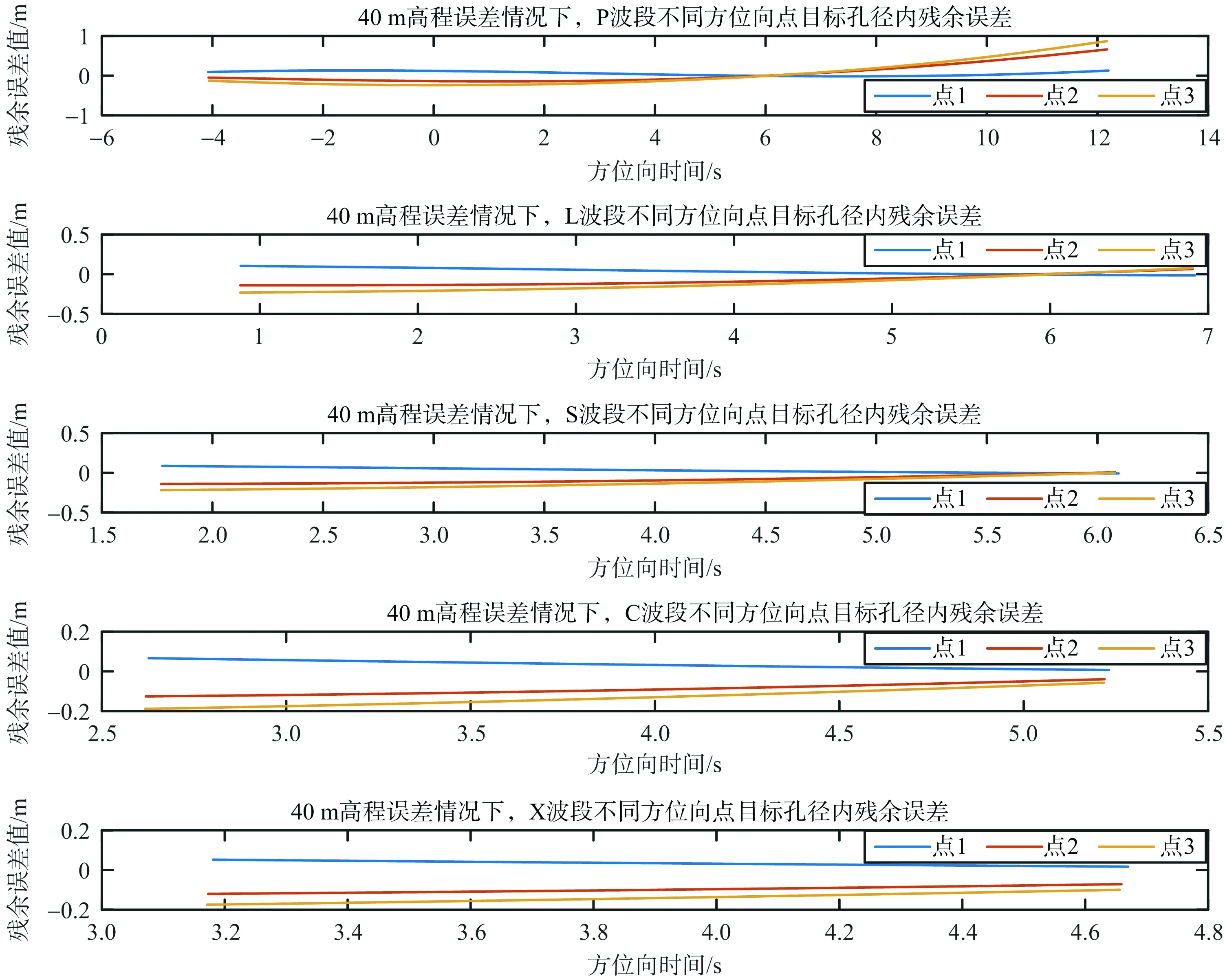
圖7 參考高程誤差40 m時不同方位向目標的運補殘余誤差
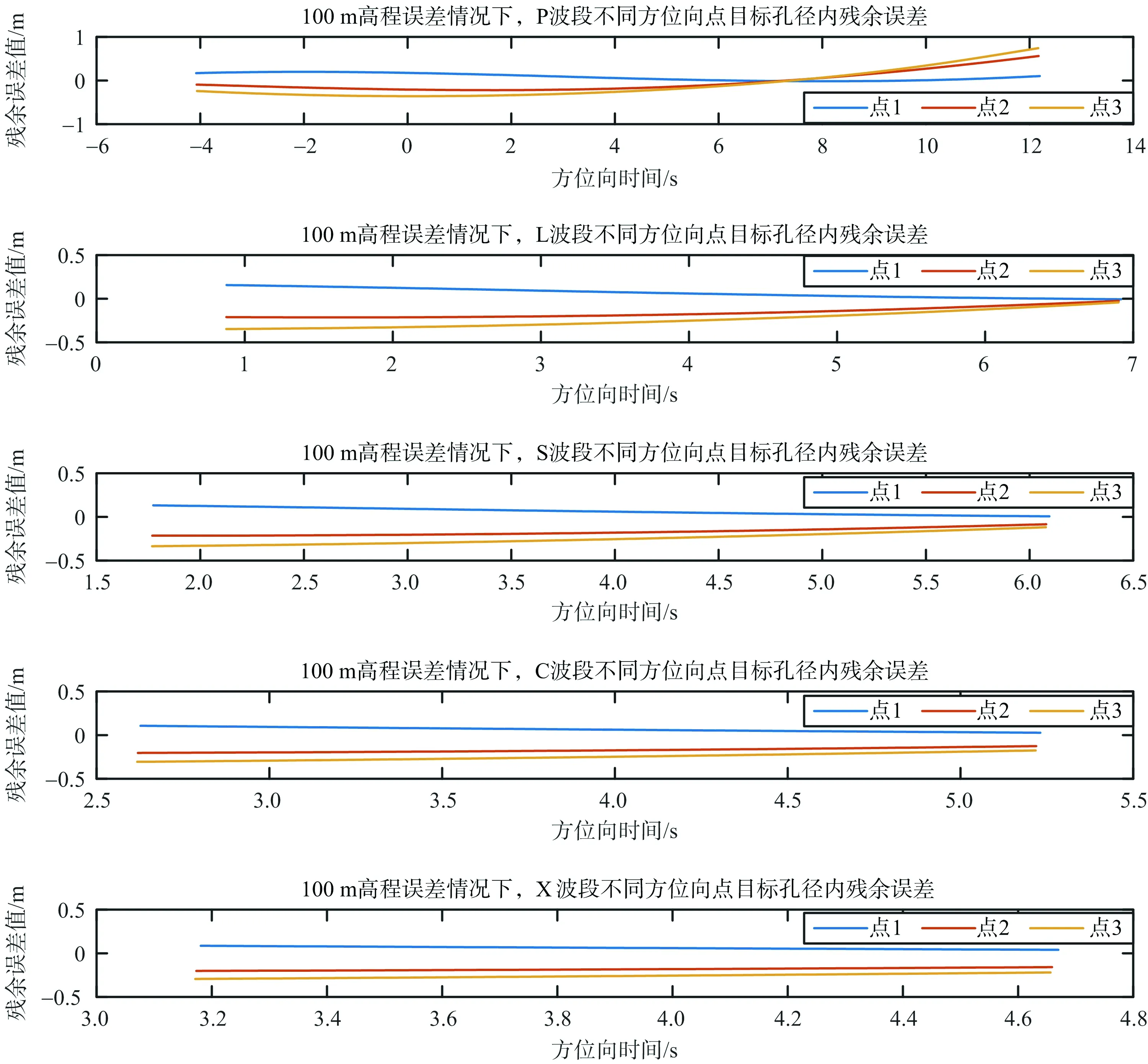
圖8 參考高程誤差100 m時不同方位向目標的運補殘余誤差
從圖9的分析結果看,本多維度SAR系統在本次集成校飛實驗中,當場景中目標高程與成像參考高程差小于50 m時,運補殘余誤差引入的距離向像素偏差不超過1個像素,但方位向像素偏差則在部分運動誤差比較大的情況下會超過1個像素,因此需要進行方位向合成孔徑內部的殘余運動誤差補償,本文采用PTA方法[18]。
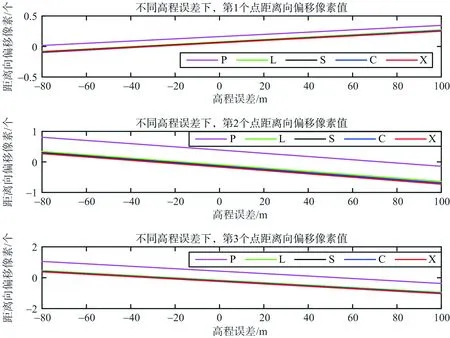
(a) 距離向像素偏差
3 多維度SAR成像自配準方法
基于上述誤差分析,本文提出的機載多維度SAR成像自配準方法的流程圖如圖10所示,其中各步驟具體解釋如下:
1) 提取各個波段SAR的內定標數據,并計算其采樣延遲的修正值。
2) 根據每個SAR發射脈沖的時間戳,獲取相應的POS數據,并根據每個波段天線相位中心與POS天線相位中心之間的相對位置關系,根據姿態測量值解算每個波段SAR航跡曲線;對POS測得的航跡進行直線擬合,得到沿著飛行方向的一條直線l0,并得到平均速度V;對于每個波段SAR航跡,基于l0擬合一個與其航跡均方根誤差最小意義下的三維偏移量,從而得到各自的航跡參考直線li。
3) 根據各個波段的多普勒帶寬和PRF,確定一個大于多普勒帶寬1.3倍,并且與各個波段SAR的PRF成整數倍關系的PRF值;本實驗中,成像處理的PRF選為250 Hz,采用方位向降采樣抽取和FFT升采樣的方式,統一各個波段SAR數據的PRF。
4) 根據各個波段的信號發射帶寬和Fs,確定一個合理統一的Fs,通過距離向升/降采樣的方式,將采樣間隔一致化,本實驗成像處理中Fs選用600 MHz。
5) 根據采樣延遲修正后的近距、各自的參考直線航跡、統一后的Fs和PRF進行成像模型的構建,并計算中心頻率等成像參數。
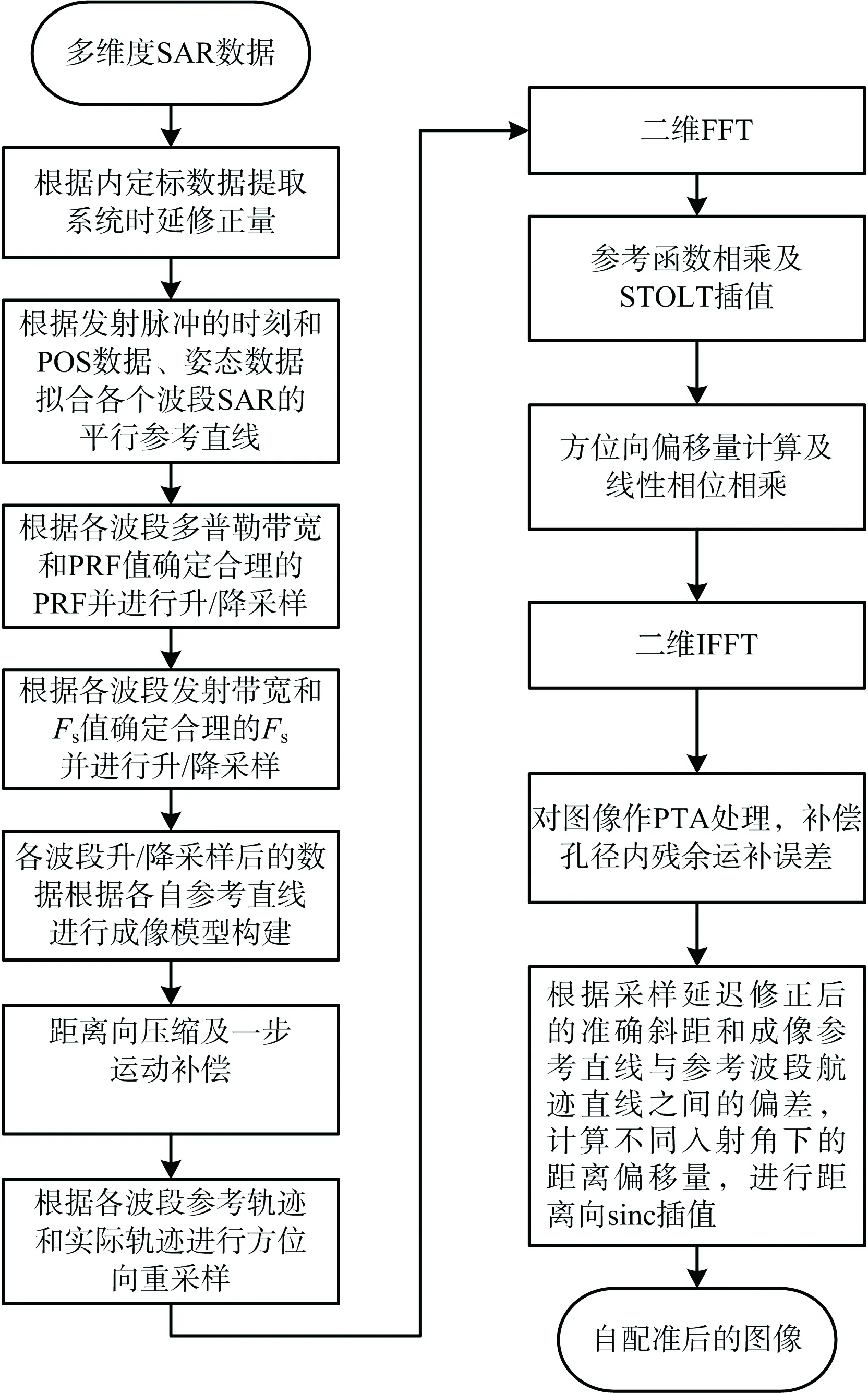
圖10 成像自配準方法流程圖
6) 進行距離向壓縮,包括距離向FFT、距離向匹配濾波、距離向IFFT;采用文獻[21]的一步運動補償方法進行運動補償,相比于兩步運補,一步運補的精度更高。
7) 根據各波段實際航跡和平均速度值,進行回波的方位向重采樣。
8) 采用wk算法進行成像,包括完成參考相位相乘、Stolt插值、方位向IFFT等操作;其中根據第2)步得到的方位向偏移量進行方位向線性相位相乘,以實現方位向對準。
9) 采用PTA對孔徑內運動誤差進行補償,以減小殘余誤差對圖像質量和自配準的影響。
10) 計算兩波段間基線導致的距離向偏差,如圖11所示,兩波段間基線ΔL導致同一目標點T在兩波段圖像上位于不同的距離門處,因此需要計算基線導致的距離向偏差值;根據該基線導致的距離向偏差值進行sinc插值,糾正這一隨距離門變化的偏差。
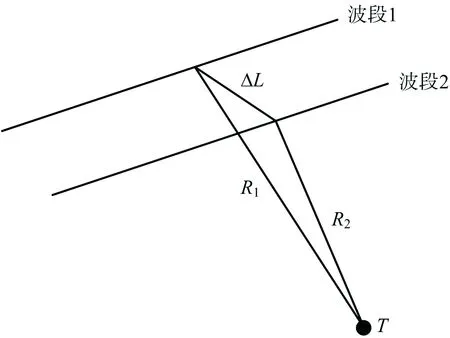
圖11 兩波段間基線示意圖
以上步驟在成像過程中選擇一個波段數據作為參考,其他波段的相關參數均和該波段進行比較和計算,則通過上述步驟得到的即是自配準的圖像。
4 機載多維度SAR成像處理結果
4.1 數據介紹
2020年10月8日,中國科學院空天信息創新研究院研究團隊在甘肅省酒泉市敦煌陽關林場開展飛行試驗。六波段雷達同時工作,P、L、S、X波段工作在全極化模式,C和Ka波段工作在全極化干涉1 m分辨率模式,飛行海拔4 500 m左右。圖12藍色實線展示了飛行航線,圖13為觀測區域的光學影像。
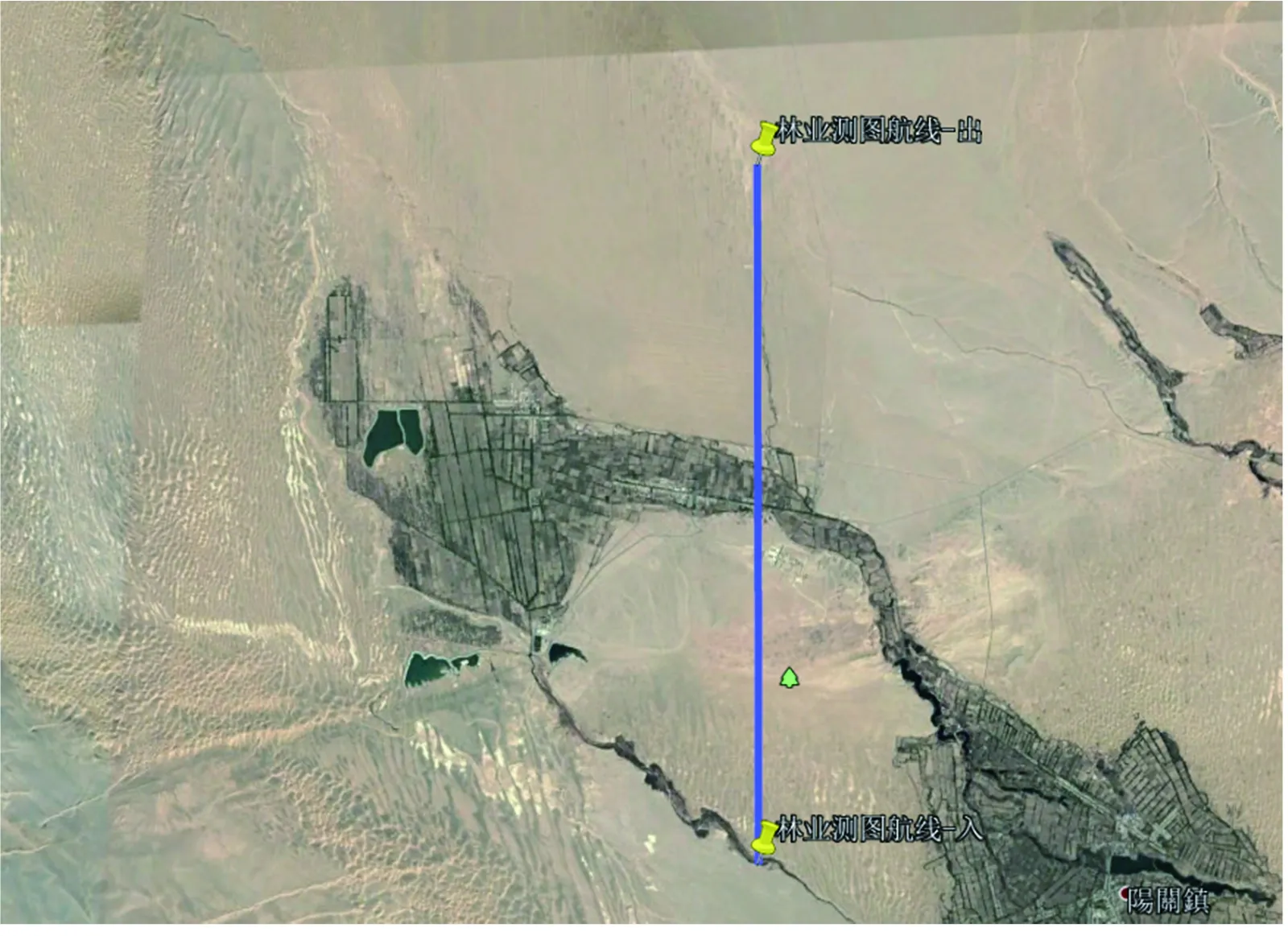
圖12 飛行航跡示意圖

圖13 觀測區域光學影像
4.2 處理結果
下面首先給出不進行自配準處理,而是各個波段分別成像處理的斜距圖像,如圖14所示,從(a)到(e)分別是P、L、S、C、X波段的SAR圖像,其中C波段給出的是干涉中的主圖像數據處理結果。可以看到斜距圖像在方位和距離向均存在偏移和比例不一致現象。圖15給出了利用本文自配準處理方法得到的斜距圖像,可以看到各波段圖像在本方法成像之后即可實現較好的配準效果。圖16給出了自配準處理各個極化通道Pauli分解后的偽彩色合成圖。圖17以棋盤格拼貼的形式給出了本方法自配準成像后各個波段的圖像鑲嵌效果,為了便于辨識邊界以目視判斷配準效果,此處故意將各個波段圖像進行了不同程度的亮度調節,可見圖像中的道路、農田邊界等均無縫銜接,證明了各波段圖像之間實現了良好的成像自配準。為了定量化地衡量自配準精度,本文采用SAR-SIFT[22-23]方法進行特征點自動提取和配準。以S波段SAR圖像為參考圖像,與P、L、C、X各波段圖像進行匹配,分別提取到99、141、203、381個匹配點,其中S和C波段圖像匹配點如圖18所示。統計匹配點像素偏差的均方根如表6所示,可見本方法達到的成像自配準精度在1個像素以內,驗證了本文誤差分析的正確性和自配準處理方法的有效性。
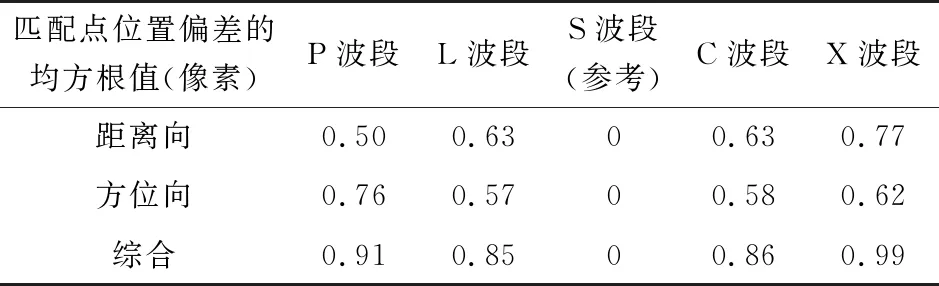
表6 各波段SAR圖像特征點的配準精度

圖14 未進行自配準成像的結果圖
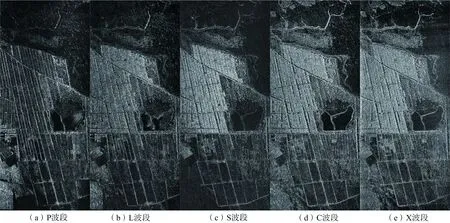
圖15 自配準成像的結果圖
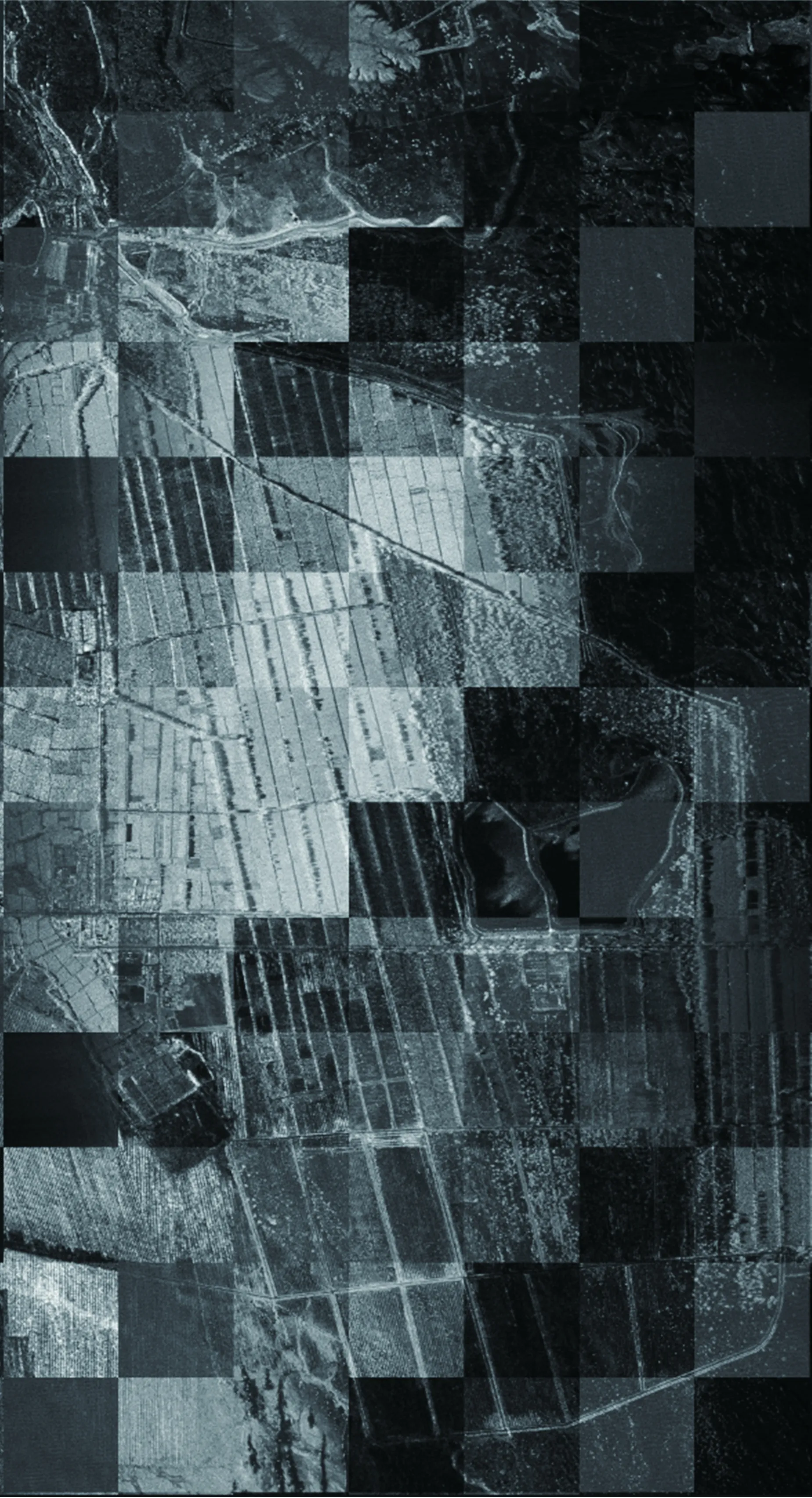
圖17 各波段成像結果的棋盤格顯示
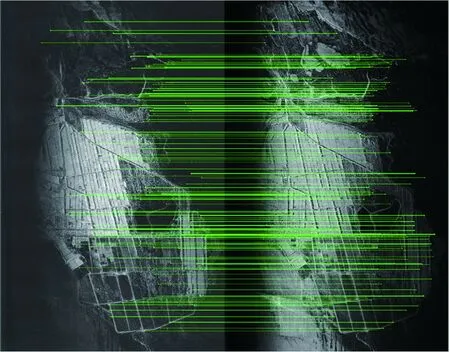
圖18 S波段與C波段SAR圖像特征點匹配結果
5 結束語
本文介紹了中科院空天院牽頭研制的一部機載多維度SAR系統及其集成校飛實驗數據的情況,指出了自配準成像處理的必要性,并全面梳理了影響配準的系統參數和誤差源。在此基礎上結合飛行實驗的實際參數,對誤差源影響進行了定量化計算和分析,并提出了一套完整的成像自配準處理方法。利用該方法對飛行實驗獲取的多維度SAR數據進行了處理,自配準精度可達到一個像素以內,驗證了誤差分析的正確性和自配準方法的有效性,同時也間接驗證了該多維度SAR系統設計的合理性。本文自配準處理方法為多維度SAR數據的進一步分析提供了良好的基礎,后續可以此自配準的單視復圖像為基礎,開展典型目標在多波段多極化下的圖像特征和目標特性分析以及地物分類等研究工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
作文成功之路·小學版(2020年9期)2020-10-28 08:06:36
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年7期)2017-08-22 03:36:22
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
體育師友(2012年4期)2012-03-20 15:30:10