3-PRC并聯(lián)機構(gòu)的運動學(xué)性能與仿真*
2021-11-29 11:11:36沙鑫美呂小祥
沈陽工業(yè)大學(xué)學(xué)報 2021年6期
關(guān)鍵詞:分析
沙鑫美, 呂小祥
(1. 三江學(xué)院 機械與電氣工程學(xué)院, 南京 210012; 2. 江蘇南京熱電工程設(shè)計院 設(shè)計部, 南京 210000)
并聯(lián)機構(gòu)是不少于兩條的獨立支鏈連接靜平臺與動平臺的閉環(huán)系統(tǒng),具有高穩(wěn)定性、高精度、高強度和低誤差等特點,廣泛應(yīng)用于精密加工與材料科學(xué)等領(lǐng)域.并聯(lián)機構(gòu)又可分為六自由度、三自由度和二自由度等多種類型.
目前,三自由度的并聯(lián)機構(gòu)廣泛應(yīng)用于實際工作場合,且自由度較少,主要由球面、平移和混合等3類并聯(lián)機構(gòu)組成.由于三自由度并聯(lián)機構(gòu)具有結(jié)構(gòu)簡易、承載性較強和誤差較小等優(yōu)點,該并聯(lián)機構(gòu)也成為學(xué)者研究的重點對象.其中,Yue等[1]參考Delta并聯(lián)設(shè)備的結(jié)構(gòu),提出了具有三維移動能力的并聯(lián)微操作機構(gòu);高繼良等[2]設(shè)計與分析了具有對稱結(jié)構(gòu)的3-TRT并聯(lián)機構(gòu);Zeng等[3]提出具有三平移輸出的Tri-pyramid型并聯(lián)機器人;吳騰等[4]研究了3-UPU并聯(lián)機構(gòu),同時設(shè)計分析了3-UPU的變胞機構(gòu).上述研究均是對稱型的三平移并聯(lián)機構(gòu),分別具有結(jié)構(gòu)簡易、工作空間大、造價低等特點.
為增強并聯(lián)機構(gòu)的運動學(xué)性能,本文在以往研究[5-8]的基礎(chǔ)上,提出3-PRC三平移的并聯(lián)機構(gòu).其中,“3”表示其末端輸出自由度,“P”表示prismatic joint,即支鏈的聯(lián)接副為移動副;“R”表示rotation joint,即聯(lián)接副為轉(zhuǎn)動副;“C”表示cylinder joint,即聯(lián)接副為圓柱副.與以往研究相比,本文3-PRC并聯(lián)結(jié)構(gòu)主要具備3個優(yōu)點:1)該機構(gòu)的動平臺輸出無轉(zhuǎn)動,且具有3個平移自由度;2)所有支鏈對稱,且各向同性;3)該機構(gòu)的運動副均是低副,所以其加工精度和承載能力較高.
1 3-PRC并聯(lián)機構(gòu)的構(gòu)型描述
本文設(shè)計的3-PRC并聯(lián)機構(gòu)的構(gòu)型如圖1所示.在該構(gòu)型中,利用轉(zhuǎn)動副R、圓柱副C和移動副P組成3條支鏈,并聯(lián)機構(gòu)的靜平臺與動平臺相連.其中,圓柱副由一個轉(zhuǎn)動副和同軸移動副組成,而轉(zhuǎn)動副與圓柱副的回轉(zhuǎn)軸線平行.
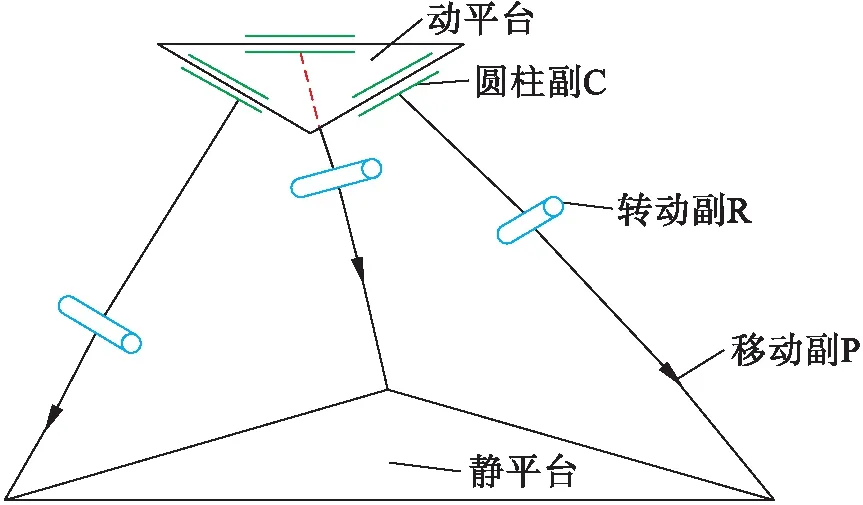
圖1 3-PRC并聯(lián)機構(gòu)構(gòu)型圖Fig.1 Configuration of 3-PRC parallel mechanism
2 運動學(xué)研究
運動學(xué)研究是對并聯(lián)機構(gòu)性能進行分析的基礎(chǔ),其研究對象是動平臺末端輸出、機構(gòu)構(gòu)成和驅(qū)動之間的運動關(guān)系,即分析末端輸出與機構(gòu)組成的位移、速度和加速度.為分析并聯(lián)機構(gòu)的運動學(xué)位置,本文首先計算3-PRC并聯(lián)機構(gòu)的自由度數(shù)量,再建立相應(yīng)的坐標系;然后求出并聯(lián)機構(gòu)的位置正解和反解,從而利用機構(gòu)的運動影響系數(shù),分析并聯(lián)機構(gòu)的速度、加速度和奇異性.
2.1 自由度計算
在分析動平臺輸出自由度過程中,本文使用螺旋理論進行具體的研究.由圖1可知,本文提出的3-PRC并聯(lián)機構(gòu)的所有PRC支鏈均由圓柱副C、轉(zhuǎn)動副R和移動副P組成,而移動副P與轉(zhuǎn)動副R均可使用螺旋系表示.其中,移動副P的節(jié)距為無窮大,而轉(zhuǎn)動副R為0,即PRC支鏈的螺旋系Si(1≤i≤4)表達式為
(1)
式中,e2、f2、e4和f4為PRC支鏈上運動副的空間位置數(shù)據(jù).根據(jù)螺旋系的相關(guān)理論可知,支鏈的運動螺旋與約束螺旋之間具有互易關(guān)系;另外,兩者的互易積是0,則可得到其支鏈的約束螺旋S′i(1≤i≤2),其表達式為
(2)
由式(2)可知,該支鏈具有兩個約束Y軸和Z軸的旋轉(zhuǎn)自由度.同理,其他支鏈的約束螺旋也具有兩個旋轉(zhuǎn)自由度[9-10].由于3個轉(zhuǎn)動自由度均被固定,但動平臺的移動自由度未被約束,則動平臺末端不能自由轉(zhuǎn)動,即該并聯(lián)機構(gòu)的輸出是三維的平動.
根據(jù)計算結(jié)果可知,3-PRC并聯(lián)機構(gòu)的末端自由度為3.
2.2 坐標系建立
根據(jù)并聯(lián)機構(gòu)的結(jié)構(gòu),可設(shè)其靜平臺與動平臺分別是邊長為a、中心為O和邊長為b、中心為P的正三角形.利用這兩個中心,分別建立坐標系O-XYZ和P-xyz,如圖2所示.圖2中,動平臺中心P在O-XYZ中的坐標為(xP,yP,zP).
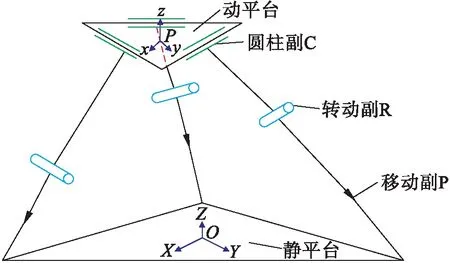
圖2 3-PRC并聯(lián)機構(gòu)坐標系Fig.2 Coordinate system of 3-PRC parallel mechanism
2.3 位置正反解
在建立如圖2所示的坐標系后,由于支鏈與靜平臺之間用驅(qū)動桿連接,可設(shè)支鏈與靜平臺平面的夾角為α,其長度為d,滑動距離為li,圓柱副的連接桿長度為hi,與靜平臺平面的夾角為θi,滑動距離為si.
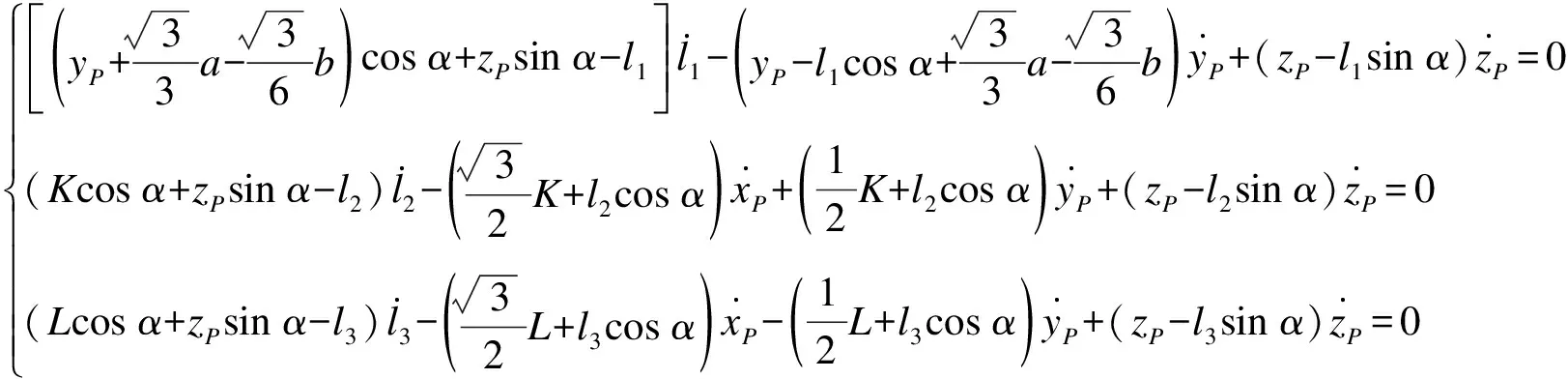
驅(qū)動桿的滑動距離是并聯(lián)機構(gòu)的位置反解.為求解該數(shù)值,已知動平臺中心P的坐標為(xP,yP,zP),本文列舉第一個支鏈的方程組為
(3)
根據(jù)并聯(lián)機構(gòu)的結(jié)構(gòu),相對于z軸,3個支鏈以120°分布.將第一個支鏈旋轉(zhuǎn)120°和240°,可得到如下兩個方程組,即
(4)
(5)
聯(lián)立式(3)~(5)得
(6)
將式(6)整理,求解可得
(7)
式中:W1=W2=W3=1;且
此時,利用動平臺中心P的坐標(xP,yP,zP),即可求解得到3-PRC并聯(lián)機構(gòu)的位置反解.而對于該并聯(lián)機構(gòu)的位置正解,若已知驅(qū)動桿的滑動距離li(i=1,2,3),利用式(6)可以求得動平臺中心P的坐標(xP,yP,zP),即可求解得到3-PRC并聯(lián)機構(gòu)的正反解.
2.4 速度和加速度
為獲取3-PRC并聯(lián)機構(gòu)的運動狀態(tài),本文使用運動影響系數(shù)法分析其速度和加速度.式(6)是3-PRC并聯(lián)機構(gòu)的運動方程式,利用廣義坐標可表示為
U=f(I,Φ0)=0
(8)
式中:Φ0為動平臺中心P的坐標(xP,yP,zP);I為驅(qū)動桿的滑動距離(l1,l2,l3).分別對時間t進行求導(dǎo),可得
(9)
展開式(9)可得
(10)
式中,驅(qū)動中間變量K和L的公式分別為
(11)
展開可得
(12)
式中,雅克正矩陣和逆矩陣的分量mi和eij的表達式為

(13)
利用式(13)可求解具有3個維度的二階影響系數(shù)矩陣,即

(14)
3 仿真分析
利用ADAMS軟件對3-PRC并聯(lián)機構(gòu)進行三維建模.通過仿真驗證分析結(jié)果,為并聯(lián)機構(gòu)的具體控制提供相應(yīng)的理論依據(jù).
3.1 逆運動學(xué)仿真
使用動平臺中心點固定的運動軌跡,通過ADAMS軟件即可計算出并聯(lián)機構(gòu)驅(qū)動模塊的位移、速度和加速度.令t表示時間,設(shè)定End time為10 s,Steps為1 000.則本文動平臺中心點P的曲線軌跡方程為
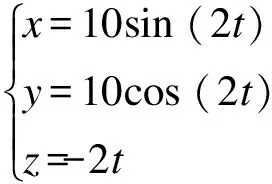
(15)
當(dāng)該動平臺中心點按照以上方程進行運動時,本文測試驅(qū)動模塊的位移、速度和加速度,得到的曲線如圖3~5所示.
3.2 正運動學(xué)仿真
當(dāng)3-PRC并聯(lián)機構(gòu)的驅(qū)動桿輸入確定時,本文仍可以對該機構(gòu)的動平臺中心點輸出進行仿真.在仿真中,設(shè)定End time為10 s,Steps為1 000.同時向ADAMS軟件中導(dǎo)入3個Splines函數(shù)曲線,作為驅(qū)動桿的輸入,即
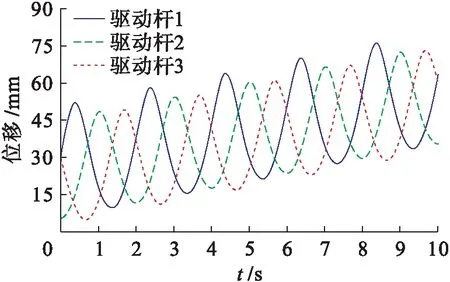
圖3 驅(qū)動模塊的位移曲線Fig.3 Displacement curves of driving module
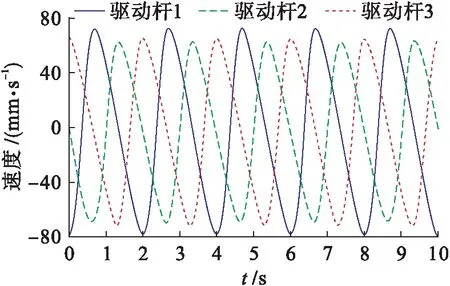
圖4 驅(qū)動模塊的速度曲線Fig.4 Speed curves of driving module
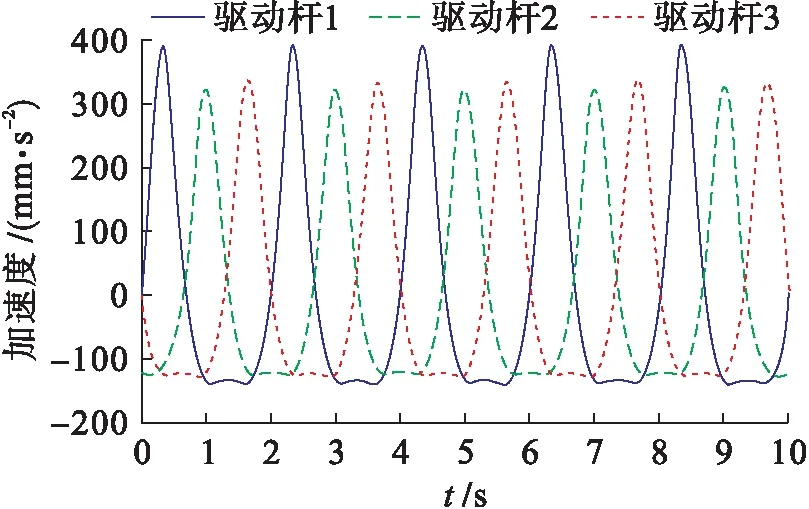
圖5 驅(qū)動模塊的加速度曲線Fig.5 Acceleration curves of driving module
利用以上參數(shù)運行ADAMS軟件,可以統(tǒng)計得到動平臺中心點的位移、速度和加速度曲線,分別如圖6~8所示.
由圖3~8可知,在3-PRC并聯(lián)機構(gòu)的正逆運動學(xué)仿真中,其驅(qū)動模塊與動平臺中心點的軌跡位移均一致,3個驅(qū)動桿之間沒有互相干涉的情況,同時其速度和加速度均無突變.仿真結(jié)果表明,3-PRC并聯(lián)機構(gòu)的設(shè)計合理,且其正反解與模型的理論分析結(jié)果均正確無誤.
3.3 有限元分析
為了進一步分析3-PRC并聯(lián)機構(gòu)的性能,本文對該機構(gòu)進行了有限元分析,選取了一種特殊位姿,即將并聯(lián)機構(gòu)置于工作空間的邊界附近.在這個狀態(tài)下,動平臺和其他部件的變形均很嚴重,整個機構(gòu)處于嚴重的受力不均勻狀態(tài),從而檢測并聯(lián)機構(gòu)的危險部位.
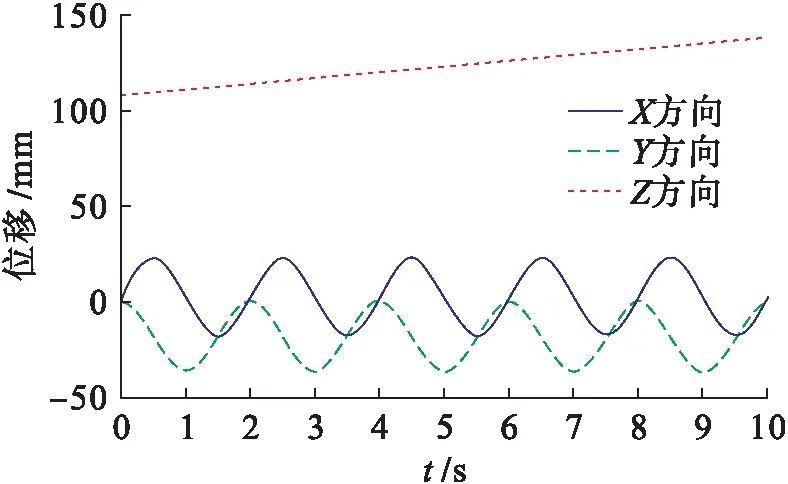
圖6 動平臺中心點的位移曲線Fig.6 Displacement curves of center point of motion platform
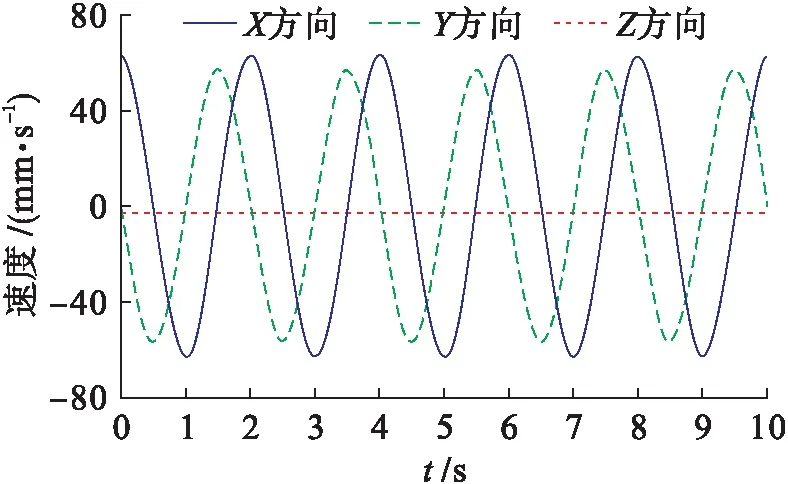
圖7 動平臺中心點的速度曲線Fig.7 Speed curves of center point of motion platform
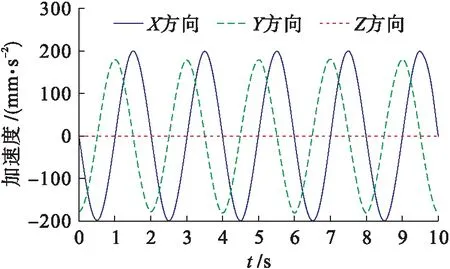
圖8 動平臺中心點的加速度曲線Fig.8 Acceleration curves of center point of motion platform
有限元分析主要有預(yù)處理、分析計算和處理三個步驟.在預(yù)處理過程中,本文分析了并聯(lián)機構(gòu)的材料屬性、裝配方式和關(guān)系,使用ANSYS軟件添加移動副、轉(zhuǎn)動副和圓柱副等約束和接觸,得到的模型如圖9所示.當(dāng)并聯(lián)機構(gòu)的動平臺承受垂直向下且大小為100 N的力時,并聯(lián)機構(gòu)發(fā)生了較大的變形,結(jié)構(gòu)圖如圖10所示.
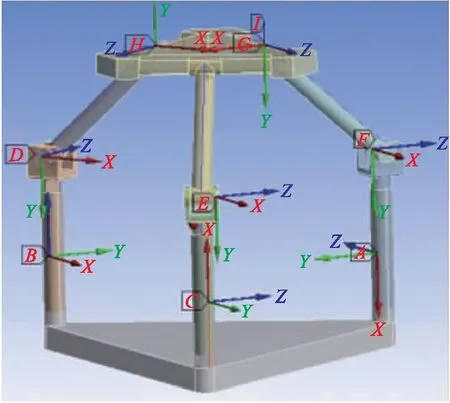
圖9 3-PRC并聯(lián)機構(gòu)的軟件模型Fig.9 Software model for 3-PRC parallel mechanism
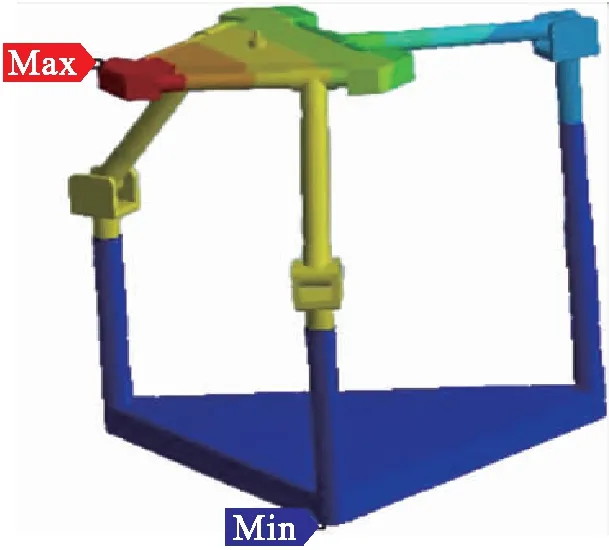
圖10 3-PRC并聯(lián)機構(gòu)變形結(jié)構(gòu)圖Fig.10 Deformation structure diagram of 3-PRC parallel mechanism
經(jīng)過ANSYS軟件分析可知,在受力條件下,并聯(lián)機構(gòu)的最大變形量為7.843 2×10-2mm,最大應(yīng)力值為40.658 MPa,最小安全系數(shù)為6.121.一般來說,抗不穩(wěn)定系數(shù)的取值范圍為[3,5],最小安全系數(shù)距離這個范圍越遠越好.因為最小安全系數(shù)為6.121,所以本文的并聯(lián)機構(gòu)尺寸是合理的,結(jié)構(gòu)基本達到安全標準.
4 結(jié) 論
本文對3-PRC并聯(lián)機構(gòu)進行了設(shè)計與建模,通過理論推導(dǎo)與軟件仿真的方式詳細分析了其運動學(xué)性能,仿真結(jié)果驗證了理論推導(dǎo)的正確性和安全性.通過ANSYS軟件仿真可知,本文所設(shè)計的并聯(lián)機構(gòu)的安全性有待提高,即最小安全系數(shù)與抗不穩(wěn)定系數(shù)的取值范圍距離仍然較小,存在一定的優(yōu)化空間,未來將繼續(xù)優(yōu)化并聯(lián)機構(gòu)的設(shè)計,提高其最小安全系數(shù)指標.
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(社會科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
