基于PSO-CNN的LPI雷達波形識別算法
2021-11-29 03:47:40劉松濤汪慧陽
系統工程與電子技術 2021年12期
關鍵詞:信號
趙 帥, 劉松濤, 汪慧陽
(海軍大連艦艇學院信息系統系, 遼寧 大連 116018)
0 引 言
低截獲概率(low probability of intercept, LPI)雷達是一種基于脈沖壓縮技術實現信號高時寬帶寬積、強抗干擾能力及低截獲特性的新型雷達,現廣泛裝備于各國軍隊。在當今復雜電磁環境、激烈電子攻防及信息制勝的戰場背景下,準確高效識別對抗方的LPI雷達波形,對判斷危險等級、構建戰場態勢及實施對抗干擾和干擾效果評估具有重要意義[1]。
基于時頻分析的LPI雷達波形識別方法是該領域的重要分支。作為結合了時間與頻率分析手段的信號處理方法,該方法能夠更準確地反映雷達信號這種非平穩信號的時變本質,使得對雷達信號的分析精確到具體時間的特定頻率上,具有對雷達信號的惟一可辨識性。時頻分析算法種類繁多,常見的有STFT(short-time Fourier transform)、WT(wavelet analysis)、CWD(Choi-William distribution)、WVD(wigner-ville distribution)及其變種等。該類方法首先將雷達信號轉變為時頻圖像,后對圖像進行識別來實現對雷達信號的分類。
卷積神經網絡(convolution neural network, CNN)在圖像識別領域有著舉足輕重的地位。在對雷達時頻圖像識別的研究中,CNN作為主流的特征提取及分類器被廣泛應用,如何選取適配高效的CNN結構成為學者們亟待解決的問題。Zhang在文獻[2]中對CNN的卷積層數量、隱藏單元數量及池化層種類進行人工選參,通過對比確定出最為適合的網絡超參數,并將其應用于8種LPI雷達波形的識別中。Kong則在固定卷積層數量、種類的基礎上對網絡輸入尺寸、卷積核數量及大小進行了對比實驗,得到了其實驗范圍內最適于12種LPI雷達識別的超參數[3]。吳瓊在其碩士畢業論文中細致講述了應用于雷達波形識別的多種CNN改進辦法[4]。上述文獻均是依靠人工設置多組CNN超參數,依次訓練對比結果擇優,缺乏智能性及客觀性。
于是,本文思考是否可以選取一種優化算法,與CNN相結合自適應智能選定最優CNN網絡結構,以實現更好的LPI雷達波形識別效果。
在優化算法與CNN的結合領域,國內學者的研究多是在固定的網絡結構上,使用優化算法代替傳統的梯度下降法更新網絡連接權值或閾值。如楊潔改進遺傳算法的適應度函數及交叉算子,將其應用于反向傳播(back proportion,BP)神經網絡的初始權值與閾值的尋優[5]。趙毅提出一種改進的量子粒子群優化(particle swarm optimization,PSO)算法,并將其與CNN結合[6]。此外還有高華照構建的FC-VGGNet-plus+PSO模型[7],王金哲提出PD-CNN(PSO+Dropout,PD)算法[8],均是對CNN權值、閾值進行優化。這些研究盡管在一定程度上提高了CNN的識別效果,但并未解決網絡優化的焦點問題,即結構尋優。
優化網絡結構方面,白燕燕在固定CNN網絡層數、類型排列的前提下,將卷積層中核的大小及數量、池化層類型、激活函數類型、訓練批量及學習率作為PSO粒子分量,迭代尋找最適于手寫體數據集的CNN結構[9]。該算法表現出了一定的先進性,但仍未擺脫既定網絡層架構前提這一桎梏。國外學者Junior提出一種psoCNN算法[10],可自動搭建不定層數的CNN網絡,該算法將CNN視作PSO的一個粒子,設置網絡訓練損失為適應函數,結合設置的CNN粒子更新機制,自動尋找最優CNN結構,但該算法設定的網絡排列原則還有欠缺,易生成不合理的網絡結構,且算法評估指標單一,可調整性、適應性有待提高。
結合并設計改進Junior的psoCNN算法思想,本文提出一種基于PSO-CNN的LPI雷達識別算法,以解決該方向主流分類器CNN的框架尋優問題,可為未來該領域CNN的選定提供參考。
1 CNN
CNN[11]作為一種前饋神經網絡,通過局部連接和權值共享大大縮減了參數數量,同時其二維形式可以很好地表征圖像像素之間的內部聯系,這些優點使得CNN在圖像處理領域大放異彩。
CNN主要由3種類型的網絡層堆疊而成,即卷積層(conv)、池化層(pool)和全連接層(FC)。每一層的輸出為該層輸入與層內權值、偏置的函數值,該函數通常稱為激活函數。CNN的訓練過程由雙向傳播構成。在數學層面,CNN前向傳播可表示為
(1)
式中:X為輸入數據;Oi為第i層的輸出;fi(·)為第i層使用的激活函數;gi(·)為第i層進行的加權運算;Zi為該層的加權運算輸出;Wi與b分別表示該層的權值與偏置。對于3種不同的網絡層,gi(·)有著不同的形式,具體如下所示:
(2)
式中:?表示卷積層輸入與層內權值進行的卷積運算;Pooling(·)表示池化層進行的下采樣操作,包括平均池化和最大池化兩種,主要用來縮減輸出參數量;如果是全連接層,則進行內積運算。
CNN前向傳播輸出預測值,通過誤差函數衡量其與標簽值之間的差異,隨后反向傳播使用梯度下降法更新網絡權重最小化誤差函數。CNN訓練的過程也是最小化誤差函數的過程。常見的誤差函數有交叉熵及均方誤差(mean squared error, MSE)。
作為一種深層有監督神經網絡,訓練一個完整的CNN網絡需要大量時間,對多個CNN的試錯擇優將更為花費時間且尋優范圍十分有限。因此,設計一種能夠盡可能快的大范圍自動構建并評估尋優CNN架構的算法尤為重要。
2 PSO算法
PSO算法是一種典型的群智能優化算法[12],模擬鳥群隨機搜尋事物的捕食行為而得來。將優化問題的潛在解比作搜索空間中的一只鳥,稱其為“粒子”。“粒子”在迭代過程中依照式(3)及式(4)更新其速度和位置。PSO算法流程如圖1所示。

圖1 PSO算法流程圖Fig.1 Flow chart of PSO algorithm
粒子i的第d維速度更新公式:
(3)
粒子i的第d維位置更新公式:
(4)

剖析式(3)等式右邊的3部分:第1部分為慣性部分,即粒子維持先前運動狀態的趨勢;第2部分為認知部分,即粒子通過記憶逼近自身歷史最佳位置的趨勢;第3部分為社會部分,即粒子通過共享經驗逼近群體或鄰域歷史最佳位置的趨勢。
PSO搜索范圍廣、參數數量少、收斂速度快,且算法實現易[13-14],十分適用于復雜耗時的CNN尋優工作。
3 基于PSO-CNN的波形識別算法
3.1 PSO-CNN整體算法
將CNN的一種結構視作PSO的一個粒子,每個粒子由離散的網絡層功能塊組表示,例如:conv|avgpool|conv|maxpool|FC。粒子訓練、測試、評估時,直接對功能塊組進行編譯。CNN粒子訓練過程的評估指標(grade),即適應度函數由兩部分構成:一是識別精度,由訓練過程中的驗證準確率(acc)衡量;二是網絡復雜度,由網絡參數量(Np)衡量。兩部分可通過權重因子Cf調整所占比重,具體構成如下:
(5)
式中:Nb為基準網絡參數量。選取當前個體與全局grade最高的CNN粒子作為pbest與gbest。不同于傳統粒子更新方式,粒子并非為數值表示,因此連續域數值累積的更新方式需轉變為離散功能塊的增刪替換,粒子群初始化、粒子速度的計算及粒子的更新也需新的機制。
PSO-CNN算法的整體框架如算法1所示,其中涉及的粒子群初始化、粒子速度計算與更新分別由第3.2和第3.3節介紹。對于CNN粒子識別精度的評估,可選取網絡訓練時的訓練驗證準確率及測試集測試準確率作為評估依據。為壓縮整體訓練時間,本文所設定的粒子評估前訓練epoch數通常較小,這時使用測試集測試的準確率通常不高,并不能有效衡量粒子質量,而網絡訓練時的驗證準確率可在訓練前期選取出具有最優潛力的粒子,因此使用驗證準確率作為網絡精度的評估依據。

算法 1 PSO-CNN輸入 運行次數(Nr),PSO群體粒子數(N),PSO最大迭代次數(itmax),訓練數據(X,Y),個體極值與全局極值的選擇閾值(Ctsh),網絡層數范圍(lmin,lmax),卷積層最大卷積核尺寸(kmax),全連接層最大神經元數(nmax),網絡輸出維度(dout),粒子評估前訓練epoch數(etrain),最優框架測試前訓練epoch數(etest)。 輸出 最優CNN架構及其參數數量,測試準確率。1 for j=1 to Nr do2 S={P1,P2,…,PN}←粒子群初始化(Nr,N,lmin,lmax,kmax,nmax,dout)3 P1.pbest←P1,P1.grade,P1.pbest.grade←CNN粒子分數評估(P1,X,Y,etrain)4 gbest←P1,gbest.grade←P1.grade5 for i=2 to N do6 Pi.pbest←Pi,Pi.grade,Pi.pbest.grade←CNN粒子分數評估(Pi,X,Y,etrain)7 if Pi.grade≥gbest.grade then8 gbest←Pi9 end10 end11 for it=1 toitmaxdo12 for i=1 to N do13 Pi.velocity←CNN粒子速度計算(Pi,Ctsh)14 Pi←粒子更新(Pi,Pi.velocity)15 Pi.grade←CNN粒子分數評估(Pi,X,Y,etrain)16 if Pi.grade≥Pi.pbest.grade then17 Pi.pbest←Pi,Pi.pbest.grade←Pi.grade18 if Pi.pbest.grade≥gbest.grade then19 gbest←Pi,gbest.grade←Pi.grade20 end21 end22 end23 end24 CNN粒子分數評估(gbest,X,Y,etest)←gbest25 return gbest,gbest.nparamaters,gbest.grade26 end27 return gbest,average of gbest.nparameters,average of gbest.grade
3.2 粒子群初始化
粒子群初始化的過程即依據設定的網絡層排列原則,隨機生成粒子功能塊組的過程,具體如算法2所示。排列原則的設定是為了保證架構的可行性和實用性,具體有以下幾點:一是首層必為卷積層,尾層必為全連接層;二是全連接層不穿插于其他兩層之間,即全連接層后只有全連接層,且本文將全連接層最大數量設置為5;三是需根據輸入圖像尺寸限定池化層數量,以避免深層特征圖尺度過小而不能提取有效特征。添加網絡層時,在設定的范圍內隨機生成該層的必要參數。添加卷積層時,生成卷積核尺寸大小及輸出通道數;添加全連接層時,生成該層的神經元數量;添加池化層時,隨機選擇最大池化與平均池化,根據CNN的搭建經驗,一般默認池化尺寸為3×3,步長為2×2。

3.3 粒子速度計算及更新
粒子群初始化完成后,保證群體向最優值靠攏的關鍵便是粒子速度的計算和粒子的更新。首先要解決的是粒子差異的計算,如算法3所示。
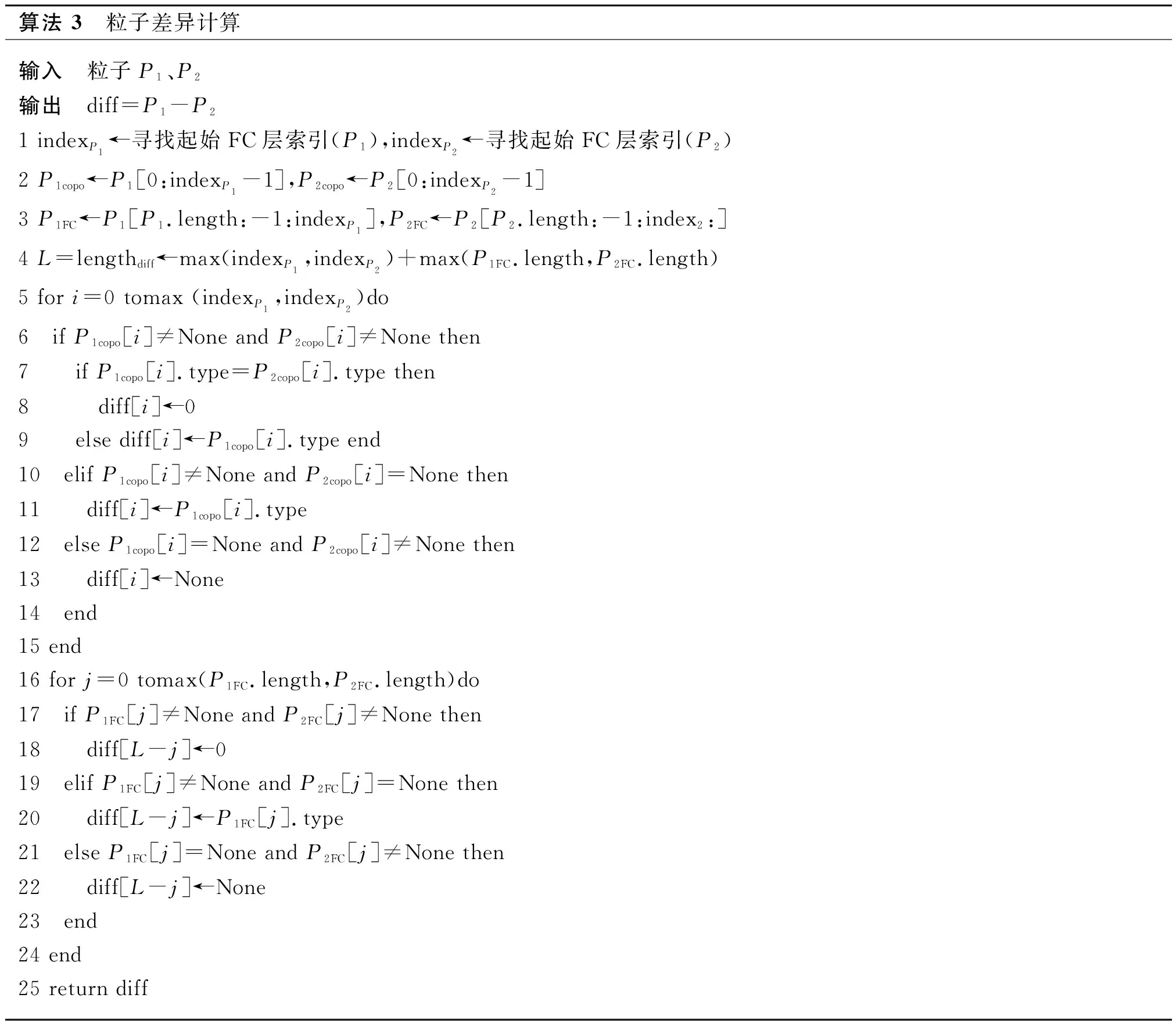
算法 3 粒子差異計算輸入 粒子P1、P2輸出 diff=P1-P2 1 indexP1←尋找起始FC層索引(P1),indexP2←尋找起始FC層索引(P2)2 P1copo←P1[0:indexP1-1],P2copo←P2[0:indexP2-1]3 P1FC←P1[P1.length:-1:indexP1],P2FC←P2[P2.length:-1:index2:]4 L=lengthdiff←max(indexP1,indexP2)+max(P1FC.length,P2FC.length) 5 for i=0 tomax (indexP1,indexP2)do6 if P1copo[i]≠None and P2copo[i]≠None then 7 if P1copo[i].type=P2copo[i].type then 8 diff[i]←09 else diff[i]←P1copo[i].type end10 elif P1copo[i]≠None and P2copo[i]=None then11 diff[i]←P1copo[i].type12 else P1copo[i]=None and P2copo[i]≠None then13 diff[i]←None14 end15 end16 for j=0 tomax(P1FC.length,P2FC.length)do17 if P1FC[j]≠None and P2FC[j]≠None then18 diff[L-j]←019 elif P1FC[j]≠None and P2FC[j]=None then20 diff[L-j]←P1FC[j].type21 else P1FC[j]=None and P2FC[j]≠None then22 diff[L-j]←None23 end24 end25 return diff
兩個粒子計算差異時,為避免更新粒子時全連接層被放置于卷積層、池化層之間,故將粒子拆分為卷積池化(copo)與FC兩部分,兩部分相向分別計算差異值。差異值的計算以前粒子為主,若兩粒子某位置層類型不同,diff選取前粒子類型;若兩粒子某位置層類型相同,diff取為0。
粒子速度由各塊隨機選取(pbest-P)或(gbest-P)相應塊構成,由于本算法中粒子的特殊性,拋棄原算法中的慣性部分。設定個體極值與全局極值的選擇閾值(Ctsh),在每個位置隨機生成一個(0,1)之間的數r。若r≤Ctsh,則選取(gbest-P)作為該位置的速度,反之則選取(pbest-P)。Ctsh控制著粒子趨近gbest的速度,Ctsh越大,粒子便越快趨近gbest,但同時粒子群的搜索范圍變小,陷入局部最優的可能性變大。
根據式(3),新的粒子由粒子速度和原粒子相加構成。當粒子速度為0時,保留原粒子相應位置功能塊;速度為N時,移除相應位置功能塊;速度為C、P、F功能塊時,則對原粒子功能塊進行替換。整體算法示例如圖2所示。

圖2 粒子速度計算及結構更新示例Fig.2 Example of particle velocity computation and architecture update
需要指出的是,若在粒子更新后所含池化層數量超出依據輸入圖像尺寸計算的限額,則由后至前按序移除超額池化層。
3.4 基于PSO-CNN的波形識別算法的實際應用
本文所設想的算法實際應用框圖如圖3所示。天線偵收到射頻信號,經過前端處理為中頻信號,通過時頻分析將中頻信號轉變為時頻圖像。隨后制作訓練集,標注出圖像的波形類型,用于訓練PSO-CNN模塊,尋找出最優的CNN。最優CNN找出并訓練完畢后,便可用其自動、快速、準確識別天線偵收的未知信號波形。在眾多的時頻分析算法中,WVD算法[15]具有最高的時頻分辨率,但在處理LPI信號這種多分量信號時易產生交叉項干擾。SPWVD(smoothed pseudo Wigner-Ville distribution)[16]作為WVD的改進版本在保持高時頻分辨率的基礎上,很好地抑制了交叉項干擾。本文即采用SPWVD作為時頻分析方法,SPWVD定義如下:
(6)
式中:s(t)為輸入信號;t與f分別代表時間和頻率;g(u)和h(τ)為兩個漢明窗函數,且滿足g(0)=(0)=1。

圖3 算法實際應用框圖Fig.3 Block diagram of algorithm’s practical application
4 仿真實驗
4.1 建立LPI雷達信號數據集
本文所提出的LPI雷達波形識別算法針對7種最為常見的雷達信號,分別為線性調頻(linear frequency modulation, LFM)、Barker碼、Frank碼及P1、P2、P3、P4碼編碼信號。信號生成具體參數選擇如表1所示。其中,U(·)表示范圍內均勻分布;U[·]表示范圍內整數的均勻分布;{}表示可選參數集;fc表示載頻;B表示帶寬;N表示每信號周期采樣數;LBc表示巴克碼碼長;Ncc表示每套編碼包含的周期數;M表示頻步;m表示子碼長度;fs表示采樣頻率。在建立數據集時,大部分學者僅考慮加性高斯白噪聲(additive white Gaussian noise,AWGN)的影響,這與實際信道相差很大。為更好地貼近真實環境,本文搭建萊斯衰落信道模擬信號傳輸過程,信道具體參數如表2所示。表2中AWGN大小使用信噪比(signal to noise ratio,SNR)來衡量。

表1 7種LPI雷達信號仿真參數

表2 萊斯衰落信道參數
信號生成完成后,使用SPWVD方法獲取信號時頻圖像。同一信號由WVD與SPWVD獲取的時頻圖像對比如圖4所示。

圖4 同一信號的WVD與SPWVD時頻圖像Fig.4 WVD and SPWVD time-frequency images of the same signal
相比較來看,和前面理論分析一致,SPWVD的效果遠遠好于WVD的效果。7種LPI雷達信號的SPWVD時頻圖像展示如圖5所示。

分析7種LPI雷達信號時頻圖像:LFM與Barker碼編碼特征區分度很高,其余5種信號雖較為相似,也具有可供區分的特征。Frank,P1及P2時頻圖像具有明顯的階梯狀特征,而P3,P4信號則為邊緣光滑的直線段;Frank及P3信號能量中心分布于圖像左右兩側,而P1及P4能量中心聚集于圖像中心;P2信號與P1圖像特征極為相似,但兩者時頻圖像中特征線段走勢相反,P2為下行,P1為上行。總之,使用CNN對7種時頻圖像的識別分類具有可行性。數據集其他參數如表3所示。

表3 數據集仿真條件設置
4.2 算法訓練及評估
算法依托Tensorflow+Keras框架實現。作為一種高度模塊化且具有用戶友好應用程序接口的神經網絡庫,使用Keras搭建神經網絡十分簡單易行。本文實現的CNN粒子生成、更新,均是在以列表形式存在的功能塊組上進行,Keras序列化模型可以較輕松實現對各功能塊組的編譯、訓練及測試。
算法實驗平臺為Intel(R) Core(TM) i7-8565U CPU@1.80 GHz處理器,8 G內存,未使用顯卡加速。
4.2.1 算法單精度指標訓練及評估
為檢驗PSO-CNN算法尋找高識別精度CNN結構的能力,本節僅采取acc作為粒子的評估指標,即將式(5)中Cf設置為0。依據表4實施訓練5次,得到每次訓練的最優CNN粒子,訓練結果如表5所示,其中acc-10為所選出的最優粒子進行10 epochs訓練后的驗證準確率。

表4 PSO-CNN算法參數選擇
觀察表5,5次訓練中的acc-10均超過97%,參數數量大多在百萬級別。限于硬件水平,每次訓練所花費的時間在10~27 h不等。

表5 單精度指標PSO-CNN算法訓練結果
5次訓練gbest進化曲線如圖6所示。一次epoch訓練后評估得到的gbest,在迭代中逐步更新。gbest的acc值呈遞增趨勢,經過10次迭代,acc值最終均達到80%左右的水平。

圖6 單精度指標PSO-CNN算法訓練gbest進化曲線Fig.6 Training gbest evolution curve of single precision index PSO-CNN algorithm
第3次與第5次所尋得的最優粒子精度最高,將這兩次訓練得到的最優CNN框架展示如圖7所示。

圖7 單精度指標PSO-CNN算法獲取的最優結構Fig.7 Optimal structure obtained by single precision index PSO-CNN algorithm
單精度指標PSO-CNN算法獲取的CNN均為較淺的5層網絡。由于數據集圖像為簡單的線條,所含的深層次特征較少,淺層網絡更具有適配性。
選取LeNet[17]、ZFNet、AlexNet[18]、VGG13、VGG16、VGG19[19]、GoogleNet[20]、ResNet34及ResNet50[21]這9種經典CNN結構使用相同訓練集進行訓練,所得模型與PSO-CNN算法第3次、第5次訓練所得模型在同一測試集上的檢測效果如圖8所示。

圖8 與9種經典CNN的檢測效果對比 Fig.8 Comparison of test results with nine classic CNNs
通過對比可以看出,單精度指標PSO-CNN算法獲取的兩種CNN結構在測試集上得測試效果超過了絕大部分所選取的經典CNN結構,直觀展示了算法的優越性。11種CNN結構進一步的對比如表6所示,其中參數數量的計算以80×80的輸入圖像尺寸為準。

表6 與經典CNN的進一步對比
結合圖7和表6可知,通過PSO-CNN算法尋優獲取的兩種CNN具有較簡單的結構、最少的參數、快速的檢測時間,同時實現了優越的檢測精度。最少的參數保證了模型的輕量性,快速的檢測時間保證了其實時性,在SNR≥0的情況下,PSO-CNN-3可實現94.8%的檢測精度,也印證了模型的精確性。
限于硬件水平,11種CNN結構均在訓練集上訓練了10 epochs。與同為5層網絡的LeNet相比,PSO-CNN算法所尋得的CNN結構表現出了更好的適用性。由于本實驗使用的數據集特征相對簡單,對于VGG16、ResNet-34等較深的CNN結構,一是提取過深層的特征易將簡單問題復雜化;二是需要長時間充分訓練,而這又易導致過擬合問題。
4.2.2 算法雙指標訓練及評估
在實際應用中,有時對模型輕量性要求很高而對模型精度的要求相對寬松,這就需要將模型復雜度也納入粒子的評估指標,尋找更為輕量但同時滿足一定精度要求的CNN結構。
在本節實驗中,首先設定Cf=1,即雙指標占比相同。將Nb依次設定為3.5×105、3.5×106及1.05×106,分別為單精度指標PSO-CNN算法尋優結構參數量級、一般經典CNN結構參數量級及取中參數量級。依據表4進行訓練,為了解不同Nb對粒子迭代尋優的影響,訓練過程中粒子pbest及gbest變化趨勢對比如圖9所示。

圖9 不同Nb對粒子迭代尋優的影響Fig.9 Effect of different Nb on particle iterative optimization
如圖9所示,采用雙指標(1∶1)的PSO-CNN算法在迭代過程中可實現acc與param的同時尋優,粒子gbest的grade值也均為遞增趨勢。當Nb取3.5×106時取得最好的精度尋優效果,初始化粒子時param為非0值,說明初始化粒子的參數量均未超過3.5×106,隨著迭代次數增加,param值很快逼近1值,一方面說明粒子優化有效,可同時也說明3.5×106量級相較于更新的粒子參數量過大,導致param值對粒子參數量變化的反應較小,粒子grade受param值的影響也相應較小。Nb取3.5×105時,在第3次迭代后param擺脫0值,全部粒子參數量降至3.5×105以下,這表明param值收斂較慢,粒子grade受param的影響較大,導致在更新粒子時較大的壓縮參數量,生成的新粒子acc反而偶爾降低,出現了acc波動較大的情況。
基于不同Nb所選出的最優CNN網絡結構的其他對比如表7所示。

表7 雙指標PSO-CNN算法訓練結果
表7結果顯示,采用雙指標(1∶1)的PSO-CNN算法尋優的CNN均為105量級,與單精度指標算法相比,大幅縮減了參數數量。Nb取3.5×105時實現了84.2%的檢測精度,也滿足了較高的精度要求。
在接下來的實驗中,令Nb=3.5×105,Cf=0.5,依據表4進行訓練以研究雙指標(2∶1)的PSO-CNN算法的尋優效果。訓練過程中粒子gbest變化趨勢見圖9(c)中的3.5×105-0.5Cf曲線,pbest變化趨勢對比如圖10所示。

圖10 不同Cf對粒子迭代尋優的影響Fig.10 Effect of different Cf on particle iteration optimization
圖10結果表示,在Cf=0.5時,粒子群也可實現對grade的較快尋優,但與Cf=1時相比,粒子所能實現的acc略低且尋優網絡的參數量也相對偏高。所尋得網絡的其他對比如表7所示。總體對比,Cf=1時效果更好。
5 結 論
目前基于時頻圖像的LPI雷達波形識別多采用CNN作為特征提取和分類器,針對該領域CNN結構智能尋優這個難題,本文提出一種基于PSO-CNN的雷達波形識別算法。該算法基于識別精度及網絡復雜度兩種指標,使用PSO優化CNN,實現了較大范圍內自動搭建層數不定、層類別及層內參數不定的CNN結構并進行迭代尋優。
仿真部分首先搭建萊斯衰落信道仿真更貼合真實環境的LPI雷達信號,之后使用SPWVD將信號轉變為時頻圖像并建立數據集,使用PSO-CNN算法進行CNN結構的智能擇優。算法評估結果表明,PSO-CNN算法獲取的CNN結構與其余9種經典CNN結構相比,實現了對LPI雷達信號更好的檢測效果,且更具輕量性、實時性、收斂性及適配性。由此可見,對LPI雷達信號波形的識別不能靠經典模型的套用,而是要挖掘適配該方向的專用CNN結構,本文研究成果可為其提供重要參考。
需指出的是,限于硬件水平,本文初始化的粒子群規模為10,這在一定程度上限制了算法尋優效果,導致訓練結果出現波動的情況。在后續工作中,還將嘗試把Inception塊、殘差塊等納入CNN智能尋優范圍,以期獲得更為精確高效的CNN結構,實現更好的LPI雷達波形識別效果。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06