基于DoDAF的民機MBSE研制方法
2021-11-29 03:47:42王雨農畢文豪
系統工程與電子技術 2021年12期
王雨農, 畢文豪, 張 安,*, 詹 超
(1.西北工業大學航空學院, 陜西 西安 710072;2.中國商用飛機有限責任公司上海飛機設計研究院,上海 200120)
0 引 言
飛機設計是一項復雜的長周期工作。傳統的飛機設計工作通常分為擬定設計要求、概念設計、初步設計、詳細設計等多個階段進行[1]。設計人員在利益相關方提出初始需求后,選擇并確定飛機布局形式和總體設計參數,并在后續設計過程中經過計算、分析、修正對設計方案進行修改,使所設計出來的飛機以優良的性能最大程度地滿足使用方的要求。在此過程中產生的報告、圖樣、試驗數據及財務信息等工程數據大多采用文檔文件記錄的方式。因此在研究設計過程中存在以下問題[2]。
(1) 無法完整捕獲需求
在傳統的飛機設計過程中,研究人員通常通過自身的研制經驗確定飛機設計需求,在項目伊始難于全面提出完整正確的飛機需求,易造成各系統定義的系統需求不能完全滿足飛機需求[3]。缺乏明確的需求捕獲與分析過程,這極易造成需求捕獲不全面的問題,并且使得設計人員難以正確估計設計過程中可能產生的風險,增加設計研發過程中的不確定性,提高研發的難度,甚至會導致民機研發工作的失敗。
(2) 需求與設計的一致性難以保證
在傳統飛機設計過程中,利益相關方及設計人員多采用自然語言對需求進行描述。由于自然語言的模糊性,難以全面準確地描述需求的各項屬性,在傳遞過程中容易出現屬性缺失、屬性表述錯誤等情況。同時,不同人員由于文化背景不同,對需求的理解也會產生分歧,出現對于研制要求及設計方案的描述偏差的情況,難以保證設計與初始需求的一致性,導致各個系統無法共同協作實現飛機的整體功能要求。
(3) 設計方案難以更改,市場響應速度慢
傳統的飛機設計流程是在利益相關方提出需求后,經過初步分析后對飛機整體進行設計并在之后的階段對該方案進行調整與細化,最終得到詳細設計方案。隨著現代民機的性能指標不斷提升以及電子綜合化的趨勢,民機頂層設計的復雜程度逐漸提高,其各個子系統相互交聯、相互作用,功能之間交叉、重復,民機研制過程中的很多能力和系統邊界變得模糊[4],這種方法使得設計方案一旦確定便難以修改,不利于飛機構型管理。當需求出現變更時,必須針對飛機整體進行重新設計,從而造成大量時間、精力和金錢的浪費。
基于以上提出的3個問題,本文提出了基于美國國防部架構框架(Department of Defense Architecture Framework, DoDAF)的民機基于模型的系統工程(model-based systems engineering, MBSE)研制方法。該方法引入了DoDAF的多視圖模型描述方法,通過場景捕獲需求,從多角度構建民用飛機的設計模型并根據DODAF各視圖規范了模型描述方法,對飛機需求進行全面地分解與細化,采用模型傳遞工程數據,結合多種視圖開發信息更加立體的飛機模型,通過系統的分析歸納,層層遞進,最終得出詳細的設計要求,使得飛機研制流程完整、準確,從而更好地指導民機研制,提高民機研制效率。
1 MBSE方法研究進展
隨著科學技術的發展,民用飛機的功能與復雜性正在成倍增加,而產品開發周期在市場的要求下不斷縮短,因此變革是必要的。以更少的時間制造出更有能力且缺陷更少的系統是民用飛機研制方法發展的方向。在需求牽引和技術推動下,MBSE方法成為提高民機研制效率的一個重要方法。2007年,國際系統工程學會在《系統工程2020年愿景》中,正式提出了MBSE的定義: MBSE是建模方法的形式化應用,使建模方法支持系統要求、設計、分析、驗證和確認等活動,這些活動從概念性設計階段開始,持續貫穿到設計開發以及之后的所有壽命周期階段[5]。該方法以模型作為分析與交流的工具,避免文本作為捕獲工程數據的主要手段。基于模型的系統工程相對于傳統的系統工程有諸多不可替代的優勢,在建模語言、建模思路、建模工具上有重大轉變[6-7]。
由于MBSE方法在產品研制過程中的優勢,國內外研究學者對其做了深入的研究[8-11]。Kaslow等人通過建立一個可執行的MBSE模型,驗證了如何實現RAX CubeSat(radio aurora explorer cube satellite)在太空中的任務要求[12]。Ferreira等人應用MBSE將CMs(control maintenance system)與Fs(fuel system)集成設計并實現了仿真[13]。Pessa用系統建模言(systems modeling language,SysML)在Visual Paradigm software中基于MBSE開發了AGVs(automated guided vehicles)的控制器,并在Microsoft Visual Studio環境中實現了該控制,利用設計的AGV按照既定路徑完成對運輸材料的拖車的牽引[14]。
目前較為常用的8種MBSE方法分別是:Harmony-SE方法、面向對象的系統工程方法(object-oriented system engineering method, OOSEM)、Vitech MBSE方法、狀態分析(state analysis,SA)法、對象過程方法(object-process methodology,OPM)、Magic Grid方法、理性統一過程系統工程(rational unified process for system engineering, RUP-SE)以及Arcadia方法。這8種方法均已應用于復雜系統的設計中[15-16],但由于自身特點的不同,其所應用的行業領域也存在著許多不同[17-19]。在8種MBSE方法中,目前應用較廣的MBSE方法有Harmony-SE方法, OOSEM方法,RUP-SE方法等。其中OOSEM方法主要面向IT行業,Harmony-SE方法主要面向制造業并已經在航空業內[20-21]廣泛使用。但由于Harmony-SE方法更注重于設計的流程,其對于模型的表述方法過于單一,無法全面地描述模型并建立相應的描述規則,雖然在比較小的系統或子系統建模方面有很好地實踐性,但是對于民用客機這種復雜大型系統無法從能力、功能、系統多個角度對飛機能力進行完整與精確地分析,難以完整支撐整個設計流程。
2 基于DoDAF的民機MBSE研制流程
DoDAF是美國國防部對C4ISR(command, control, communication, computer, intelligence, surveillance, reconnaissance)體系結構框架的繼承和完善,能夠幫助決策者從多個部門、聯合能力領域、任務、組件和程序邊界中獲取并有效的組織融合信息,從而提高制定關鍵決策的能力。DoDAF不僅可用于指導國防指揮控制系統和武器裝備研制,還能廣泛運用到各種商業運作過程中的管理和研發活動[22-24]。
在民用航空領域,美國聯邦航空管理局也借鑒了DoDAF多視圖分析技術,在美國國家空域系統(National Airspace System, NAS)[25]的體系規劃和設計中也采用了DoDAF的OV、SV、TV視圖等架構工具對國家航空空域的各個系統進行描述。該體系框架具有多個不同視點,能夠從能力、功能、系統多個角度出發清晰描述各子系統之間交聯關系,從而充分考慮到每一個需求,保證設計與需求的一致性。
通過對DoDAF和民機研制過程的深入研究[26-27],根據民用飛機能力要求,本文提出了基于DoDAF的民機MBSE研制方法:在捕獲正常飛行場景下的部分飛機級需求后對其進行分析與細化,完成需求分析、功能分析及功能建模3個階段,最終得到飛機各個子系統之間的交聯關系,并生成資源流動模型、活動模型以及系統接口模型等,開發出信息更加立體的民用飛機系統級能力模型以進入下一級循環分析。
該方法規定設計過程中產生的工程數據應以模型的形式進行存儲與傳遞,保證了信息傳遞的一致性與完整性;通過DoDAF的多視圖對模型進行精準全面的描述,在設計過程中不斷分析細化,深度剖析各系統功能及系統間的交聯關系;在不同層級的需求之間建立可追溯性鏈接,當某個需求發生變化時能夠迅速鏈接到相關需求并對其進行更新。相較于傳統民機研發方法,研究過程更加直觀與精確,更有利于研發工作的開展,如圖1所示。
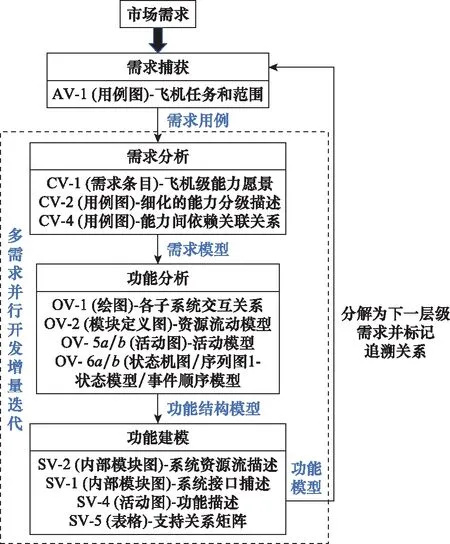
圖1 基于DoDAF的MBSE研制體系流程Fig.1 Development process of MBSE system based on DoDAF
該方法的設計過程分為需求捕獲、需求分析、功能分析與功能建模4個階段,其具體的構建流程如下。
(1) 需求捕獲階段:在總體概要信息視圖(AV-1視圖)中對飛機基礎能力愿景進行定義。飛機基礎能力愿景由利益相關方所提出的初始需求經過研究人員的初步分析得來,規定了飛機的任務與范圍。AV-1視圖為用例圖,通過描述飛機與利益相關方的相互作用來捕捉對民用飛機的基礎能力愿景,并在后續的階段中對該基礎能力愿景進行分析與細化。以民機的正常飛行場景為例,民機的任務就是采用飛行的方式將乘客安全地從起點載運到終點,其飛行過程可分為起飛、爬升、巡航、下降、進近和著陸6個階段[28],如圖2所示。
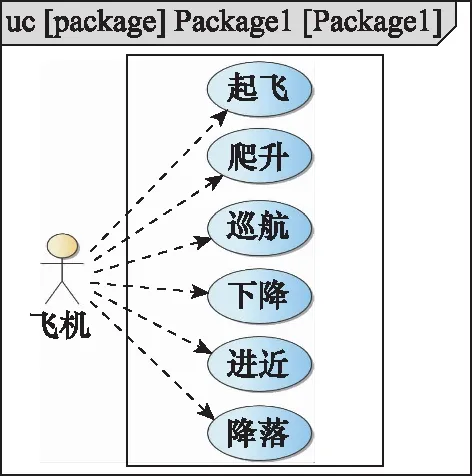
圖2 飛機任務圖Fig.2 Aircraft mission map
(2) 需求分析階段:該階段對飛機基礎能力愿景進行分析與細化,產生達到該能力愿景所應具備的能力,生成具體的能力需求,并建立需求間依賴模型。
① 在AV-1視圖的基礎上對每一基礎能力愿景進行深入分析,不斷對其屬性進行添加與更改,使得能力愿景更加精準全面,從而建立飛機級能力愿景,并在構想模型(CV-1視圖)中通過需求條目的形式進行存儲。
以需求捕獲階段所確定的飛機任務為例,對需求進行詳細分析,生成飛機級能力愿景,為下一步從中提煉飛機能力做準備。分析后得到的飛機級能力愿景如表1所示。
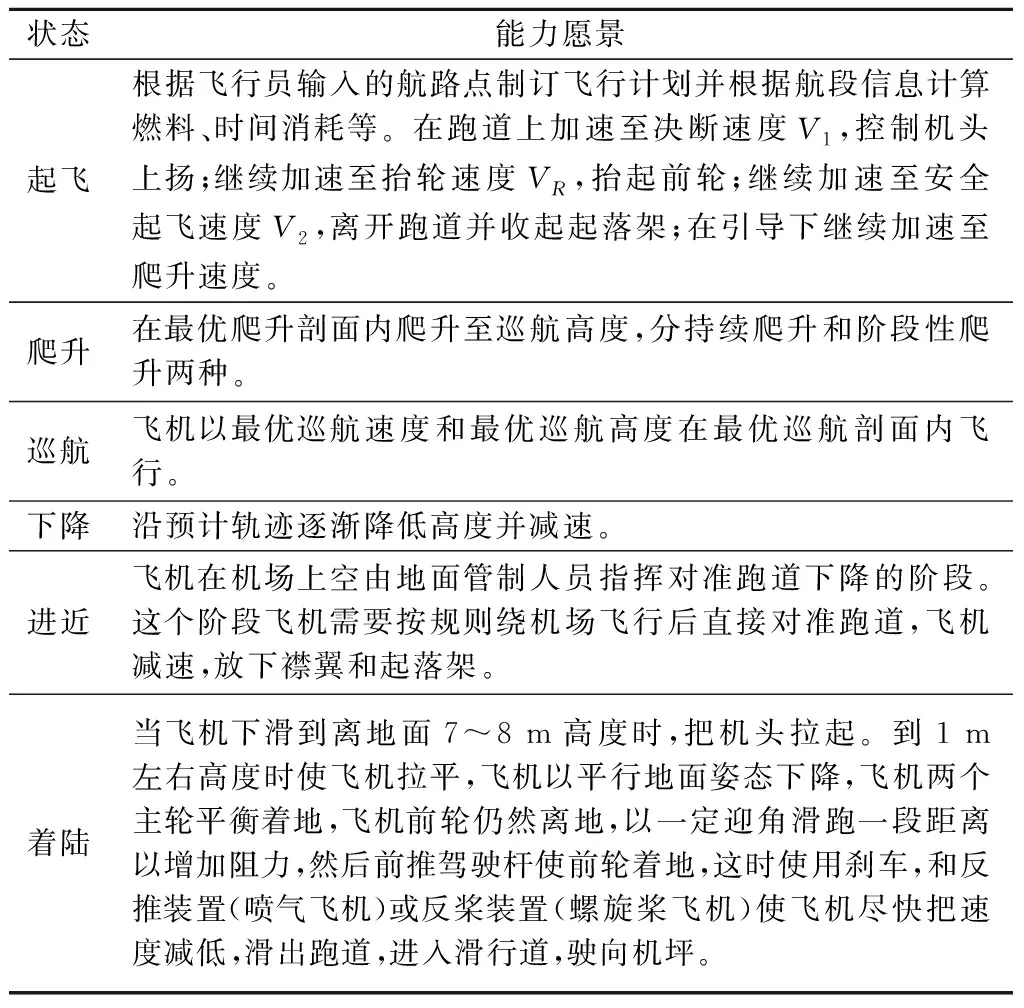
表1 飛機級能力愿景
② 通過建立運行場景用例,通過用例對民用飛機的飛機級能力愿景進行分解,從而得到具體的能力要求,在能力分級描述模型(CV-2視圖)中存儲。
根據上文中CV-1視圖的6項飛機級能力愿景分析得出每一項的能力需求,共分解出18項能力,如圖3所示,其中某些能力會在多個飛行階段中作用,如高度控制、馬赫數控制等。
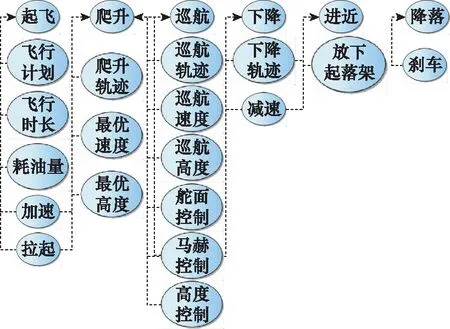
圖3 能力細化分解圖Fig.3 Capability breakdown diagram
③ 對CV-2中的所有能力之間的依賴交聯關系進行梳理得到能力依賴模型(CV-4視圖)。需要注意的是,依賴并不是一對一的關系,多項能力需求根據其在場景中的交互關系組成了一個復雜的依賴關系網。
梳理CV-2視圖中的18項計劃能力,得到能力依賴關系模型CV-4視圖,如圖4所示。例如巡航軌跡依賴于整體的飛行計劃,巡航高度依賴巡航軌跡,高度控制依賴于預測巡航高度(圖4中紅色依賴關系)。
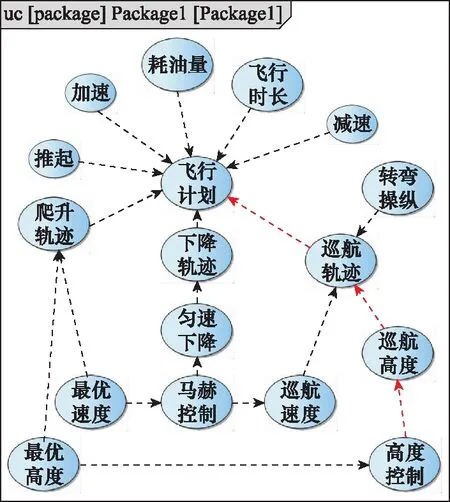
圖4 能力依賴關系Fig.4 Capability dependency relationship
(3) 功能分析階段:該階段同時對需求分析階段產生的每一個能力需求進行功能分析。針對CV-2視圖中的每一個能力都需要單獨地進行建模,采用并行開發、增量迭代的方式從而提高研制效率。
① 選取CV-2視圖中的一個能力需求,分析與該能力需求相關的各子系統之間如何協同工作及其交聯關系,建立其操作概念視圖(OV-1視圖)。
以上文需求分析階段生成的多項能力中的高度控制能力為例來建立操作視圖。
高度控制能力是指在飛機的遠距離巡航階段使其保持在固定高度穩定飛行的能力。對于民用飛機而言,大多采用自動駕駛儀對飛行高度進行設定與校準,即當飛機偏離原始狀態,飛機外部傳感器感受到偏離方向與大小,并輸出相應信號,經放大、計算處理,操縱相應作動器(舵機),使控制面(舵面)相應偏轉。當飛機回到原始狀態時,傳感器輸出信號為零,作動器以及與其相連接的控制面也回到原位,飛機按原始狀態飛行。
該能力主要與飛控系統相關,并通過控制面的偏轉實現。該能力主要由飛控系統中的飛控計算機、傳感器、舵回路等子系統完成,因此本文主要對飛控系統的子系統層級進行分析,在該層級建立操作視圖。高度控制的OV-1視圖如圖5所示。
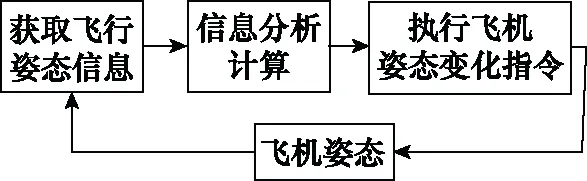
圖5 高度控制的操作概念圖Fig.5 Highly controlled operation concept diagram
② 根據其交互關系建立節點并對各子系統進行分類將其歸入不同節點中,以模塊定義圖的形式建立各子系統之間的資源流動模型OV-2視圖,從而描述各個節點之間的關系及資源流動過程。
根據高度控制的操作概念圖可建立操作“高度控制”的活動資源流模型(OV-2視圖),如圖6所示。分為傳感器模塊、飛行控制模塊、執行模塊3個節點,其中傳感器模塊包括無線電、垂直陀螺和速率陀螺等機載探測設備,飛行控制模塊包括飛控計算機、舵回路、作動器等設備,執行模塊包括液壓器和升降舵。節點之間的資源流用Flow表示,每一條Flow傳遞一條信息。傳感器模塊在獲取到高度、俯仰角及俯仰角速率信息后,將其傳遞至飛控模塊,經過飛控模塊分析計算后獲取舵機指令通過作動器傳遞至執行模塊,從而改變飛機飛行姿態。
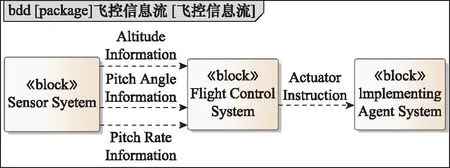
圖6 高度控制能力的活動資源流Fig.6 Highly controlled activity resource flow
③ 在資源流動模型的基礎上,即可進一步建立該操作的活動模型(OV-5a/b視圖)以及狀態模型(OV-6b視圖)和事件順序模型(OV-6c視圖),用以梳理各節點間的信息傳遞順序或控制流順序,同時針對各節點進行泳道劃分,明確泳道中的活動及活動間聯系,以輔助后續的接口設計工作。
根據高度控制能力的操作概念圖及活動資源流模型,梳理其控制流順序或信息傳遞順序建立了操作活動視圖(OV-5b視圖),針對OV-2視圖中的3個節點進行了泳道劃分,將整個高度控制過程分為傳感器模塊感應階段,飛控模塊分析計算階段及執行模塊執行階段,明確了各個泳道內的活動以及活動之間的聯系,便于之后的系統接口定義。如圖7所示。
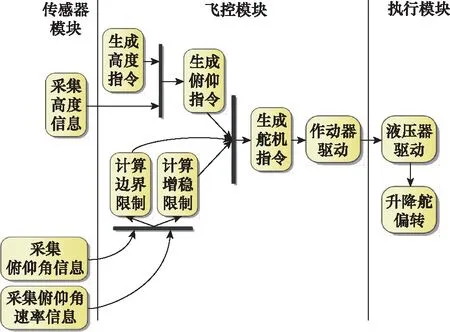
圖7 高度控制的活動圖Fig.7 Activity diagram for height control
(4) 功能建模階段:該階段同上一階段類似,也采用并行開發、增量迭代的方式進行研制。為了實現操作視圖中的這些抽象活動,需要將這些活動分配到具體的系統當中,用系統功能活動代替操作活動,明確各個活動之間的數據流。
① 在活動模型基礎上建立活動與系統的關系,將活動模型中的活動對應到系統并建立能力相關系統的功能描述(SV-4視圖),不同的泳道代表不同的系統,每個系統包含多個系統功能,同時活動與系統的支持關系矩陣(SV-5視圖)也將被建立,用于描述每個活動由哪些系統參與完成,每個系統可以支持哪些活動;
② 由SV-4視圖中系統之間的信息傳遞可對系統接口描述(SV-1視圖)和系統資源流描述(SV-2視圖)以內部模塊圖的形式進行建模,以顯示內部各子系統組成部分之間的關系,以及各子系統之間的接口。
同樣以高度控制能力為例:在OV-5b視圖的基礎上建立系統功能描述模型(SV-4視圖)如圖8所示。不同的泳道代表不同的系統,與高度控制能力相關的系統有:傳感器系統、飛行管理系統、飛行控制系統、自動飛行系統、液壓系統及控制面。將功能分析階段得出的各項活動分配至SV-4視圖中與各系統對應,每個系統包含多個系統功能。通過對比SV-4視圖的系統功能描述以及上面的高度控制活動圖OV-5b視圖,可以建立活動-系統跟蹤矩陣SV-5視圖,用于描述每個活動由哪些系統參與完成,每個系統可以支持哪些活動,具體的跟蹤矩陣這里不再贅述。

圖8 高度控制的系統功能描述Fig.8 Highly controlled system function description
通過上面的系統功能描述,系統之間的數據接口可以清晰顯現出來,將其進行歸納可以得到系統接口描述模型(SV-1視圖),如圖9所示。
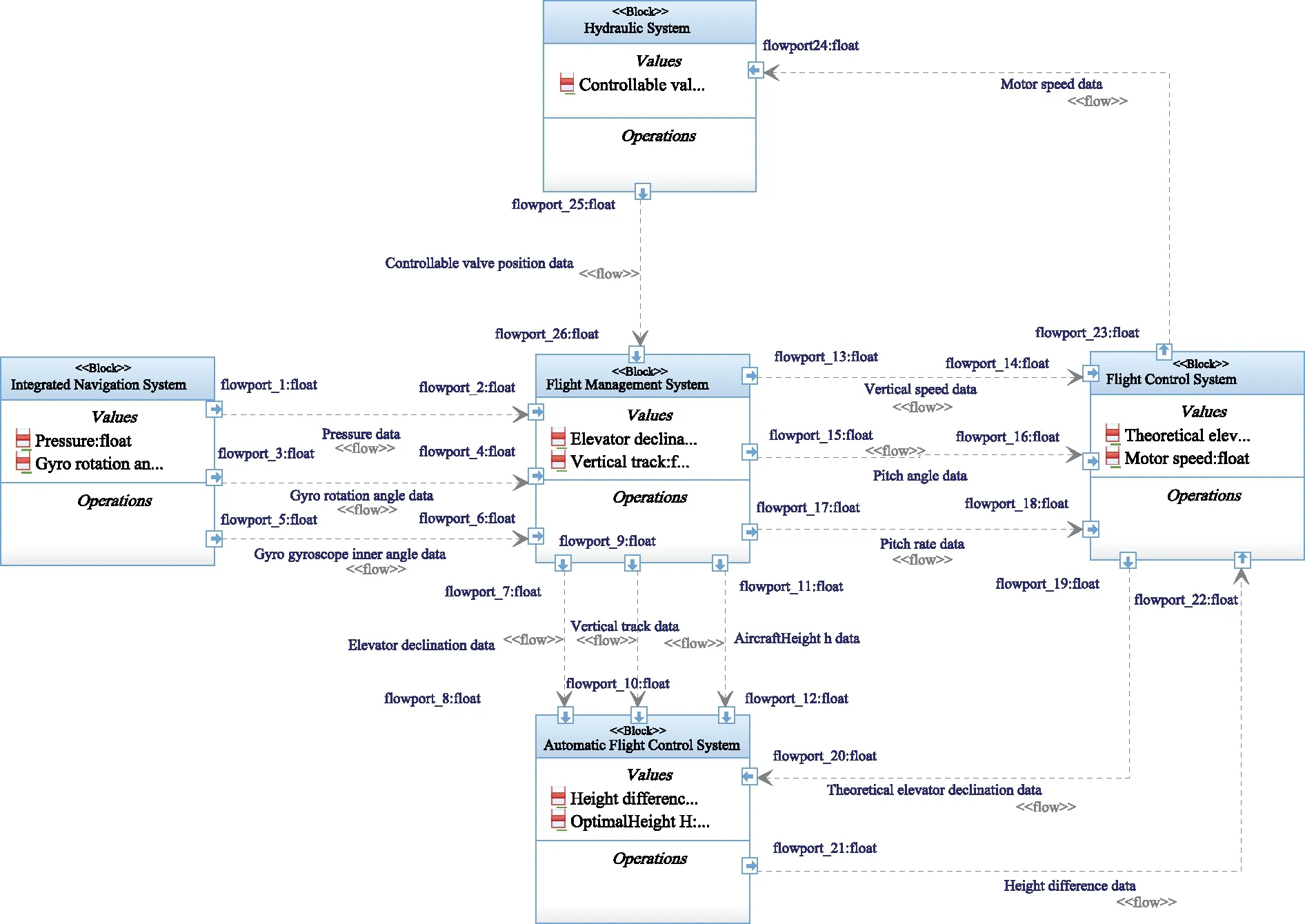
圖9 高度控制的系統接口描述Fig.9 Highly controlled system interface description
至此,關于飛機高度控制能力的分析建模已經基本完成,得到了該功能的資源流動模型、活動模型以及系統接口模型等。
由于本文只選取了高度控制這一項能力進行分析建模,所得到的系統接口模型并不完整,需要采用同樣的方法對所有的能力進行分析建模,得到每一項能力的系統模型,將其整合成一個完整的飛機子系統接口模型,這些系統接口模型接下來可用于飛機研制過程。
在整個流程中,需求捕獲階段將市場需求轉化為飛機級需求;需求分析、功能分析、功能建模3個階段將飛機級需求轉化為系統級需求。在完成以上4個階段后,設計人員應將轉化后生成的系統級需求作為初始需求輸入并再次進入需求分析階段進行循環,直到產生詳細而準確的部件級需求為止。在此過程中,應在不同層級需求(如飛機級需求與系統級需求)之間建立可追溯性鏈接,以保證當需求需要進行變更時能迅速追溯到與之相關的其他需求,從而減少返工工作、提高研制效率。
3 結 論
本文針對民用飛機在研制過程中出現的設計需求不完整、難以保證設計與需求的一致性、設計方案變更工作量大等一系列問題,提出了基于DoDAF的民機MBSE研制方法。該方法通過模型的方式傳遞工程數據,并將DoDAF的多個視角應用于模型的構建過程中從各個角度對模型進行描述,并在后續設計分析過程中對飛機能力要求進行分析與細化,逐步遞推,最終得到各個子系統的系統視圖,更加準確細致地描述飛機研制要求。此外,在不同層級的能力需求模型間建立可追溯性鏈接直至研發工作結束,使得每一條需求的來源與后續流向都清晰可見,極大地保證了設計與需求的一致性。同時,當設計需求發生變化時,設計研發人員能夠通過可追溯性鏈接迅速尋找到需要變更的所有需求,極大地減少工作量,提高研制效率。該研制方法由多種視圖組成,并在流程中詳細規范了每一視圖所用的工具與模型,將分析流程規范化,為研究人員提供了一條明確規范的研制流程,減少了研制過程中由于經驗不足而產生的重復工作。
本文采用該方法捕獲民用飛機的部分能力,對擬定的飛機能力要求進行分解細化,建立能力之間的交聯關系。針對高度控制這一能力要求,建立高度控制這一子系統的系統模型,詳細給出該系統的數據接口信息與資源流信息。在實踐過程中該方法體現出諸多優點:
(1) 將復雜大系統嚴格有序地分解為多個能力,通過對能力進行并行分析,簡化了研制復雜度,提高研制效率;
(2) 從多個角度對飛機進行建模,使模型信息更加立體,提高了模型的完整性與正確性,使得研究人員能夠更加清晰準確地對系統進行分析;提高了模型的可理解性,便于開發者與項目利益相關者和實施者以及開發者之間的信息交流;
(3) 通過模型傳遞工程數據,增加了工程數據的直觀性與完整性,保證了設計與需求的一致性。
因此,基于DoDAF的民機研制方法能夠詳細精確地描述飛機研制要求,相較于傳統民用飛機研制方法有很多優點,更加適合超大型系統工程的開發,有利于指導民機研制工作。
猜你喜歡
發明與創新(2022年30期)2022-10-03 08:40:56
環球時報(2022-05-30)2022-05-30 15:16:57
當代陜西(2019年11期)2019-06-24 03:40:28
人大建設(2018年6期)2018-08-16 07:23:10
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
Coco薇(2016年2期)2016-03-22 02:42:52
小星星·閱讀100分(低年級)(2015年10期)2015-10-22 08:30:04
Coco薇(2015年1期)2015-08-13 02:47:34