基于改進(jìn)粒子群算法的快速反射鏡自抗擾控制
2021-11-29 03:47:48馮建鑫王雅雷
系統(tǒng)工程與電子技術(shù) 2021年12期
馮建鑫, 王雅雷, 王 強(qiáng), 胥 彪
(南京航空航天大學(xué)航天學(xué)院, 江蘇 南京 211106)
0 引 言
快速反射鏡(fast steering mirror, FSM)具有轉(zhuǎn)動慣量小、跟蹤精度高、結(jié)構(gòu)緊湊、響應(yīng)速度快等優(yōu)點(diǎn)[1-3],被廣泛應(yīng)用于量子定位[4]、空間激光通信[5]、圖像穩(wěn)定[6]、高能激光武器[7]以及其他高精度跟蹤瞄準(zhǔn)等領(lǐng)域。這些領(lǐng)域均需要FSM具有較高的跟蹤精度和較強(qiáng)的擾動抑制能力,這就要求FSM的控制器要具有很好的控制性能,比例-積分-微分(proportion integration differentiation,PID)控制器雖然結(jié)構(gòu)簡單,參數(shù)整定容易,但其所能達(dá)到的控制精度和對干擾的抑制能力還有待提升。因此,有學(xué)者嘗試對PID控制器進(jìn)行改進(jìn),文獻(xiàn)[8]將自適應(yīng)強(qiáng)跟蹤卡爾曼濾波器與PID控制器相結(jié)合,在考慮衛(wèi)星平臺抖動以及工作環(huán)境噪聲的情況下,可將FSM的跟蹤精度控制在±2 μrad,但文中只考慮了FSM跟蹤低頻正弦信號的能力。文獻(xiàn)[9]在經(jīng)典PID控制器的基礎(chǔ)上,引入模糊設(shè)計(jì)思想和參數(shù)自整定的方法,設(shè)計(jì)了模糊自適應(yīng)PID控制器,但文中只驗(yàn)證了FSM跟蹤階躍信號的能力。自抗擾控制器(active disturbance rejection control, ADRC)具有控制精度高、抗干擾能力強(qiáng)的優(yōu)點(diǎn)[10-12],將ADRC用于FSM前期也有學(xué)者做了一些工作。其中,文獻(xiàn)[13]面向航空光電載荷音圈電機(jī)驅(qū)動的FSM控制問題,采用了降價自抗擾控制,提升了FSM的動態(tài)性能和穩(wěn)態(tài)精度,對工程設(shè)計(jì)具有較大的參考價值。文獻(xiàn)[14]將模糊控制與自抗擾控制相結(jié)合,設(shè)計(jì)模糊ADRC,在考慮衛(wèi)星平臺振動的情況下,用FSM跟蹤不同幅值和不同頻率的信號,但FSM的跟蹤精度還應(yīng)進(jìn)一步提高。
綜上,本文中FSM用于空間激光通信中的復(fù)合軸控制系統(tǒng),主要作用是消除系統(tǒng)中的中高頻噪聲,在考慮衛(wèi)星平臺振動的情況下仍需要具有較高的跟蹤精度。綜合考慮之后,本文擬采用自抗擾控制策略。針對ADRC參數(shù)整定難的問題,本文提出一種慣性權(quán)重基于箕舌線函數(shù)調(diào)整的改進(jìn)粒子群優(yōu)化(improved particle swarm optimization, IPSO)算法,該算法在迭代前期慣性權(quán)重大且改變率慢,后期慣性權(quán)重小且改變率快,與標(biāo)準(zhǔn)粒子群優(yōu)化(particle swarm optimization, PSO)算法相比,更有可能找到所優(yōu)化問題的全局最優(yōu)解,隨后通過5個經(jīng)典的測試函數(shù)驗(yàn)證本文對PSO改進(jìn)方式的有效性。最后將基于IPSO、PSO的ADRC和PID控制器分別用于FSM控制系統(tǒng),驗(yàn)證了基于IPSO的ADRC與其他兩種控制器相比可以更有效地抑制系統(tǒng)中的擾動,對不同頻率的高頻正弦信號也具有更好的跟蹤效果。
1 FSM控制系統(tǒng)
本文研究的FSM具有柔性轉(zhuǎn)軸,執(zhí)行機(jī)構(gòu)為音圈電機(jī),忽略電氣時間常數(shù)后,基于音圈電機(jī)驅(qū)動的FSM從電機(jī)電壓輸入到FSM轉(zhuǎn)角輸出的系統(tǒng)模型可以簡化為一個典型的二階環(huán)節(jié)[13],其開環(huán)傳遞函數(shù)如下所示:
(1)
因?yàn)楸疚膶⒒谝羧﹄姍C(jī)驅(qū)動的FSM簡化為一個二階環(huán)節(jié),故在用ADRC進(jìn)行控制時,需要一個三階的擴(kuò)張狀態(tài)觀測器(extended state observer, ESO)來觀測FSM的位置信號、速度信號和系統(tǒng)中的總擾動。那么,ADRC中待整定的關(guān)鍵參數(shù)就有β01,β02,β03,β1,β2共計(jì)5個。其中β01,β02,β03是三階ESO的增益,β1,β2為ADRC中非線性狀態(tài)誤差反饋(nonlinear state error feedback, NLSEF)控制率的增益。
本文研究的重點(diǎn)是使用IPSO優(yōu)化ADRC中的關(guān)鍵參數(shù),并將得到的參數(shù)用于FSM控制,從而提高FSM的跟蹤精度和擾動抑制能力,以使得FSM能夠滿足空間激光通信領(lǐng)域?qū)ο到y(tǒng)跟蹤精度的要求。結(jié)合研究重點(diǎn),可以得到如圖1所示的FSM控制系統(tǒng)結(jié)構(gòu)圖。

圖1 FSM控制系統(tǒng)結(jié)構(gòu)圖Fig.1 Structure diagram of FSM control system
2 ADRC
ADRC由3部分組成,跟蹤微分器(tracking-differen-tiator,TD)、ESO和NLSEF[15-18],組成結(jié)構(gòu)圖如圖2所示。
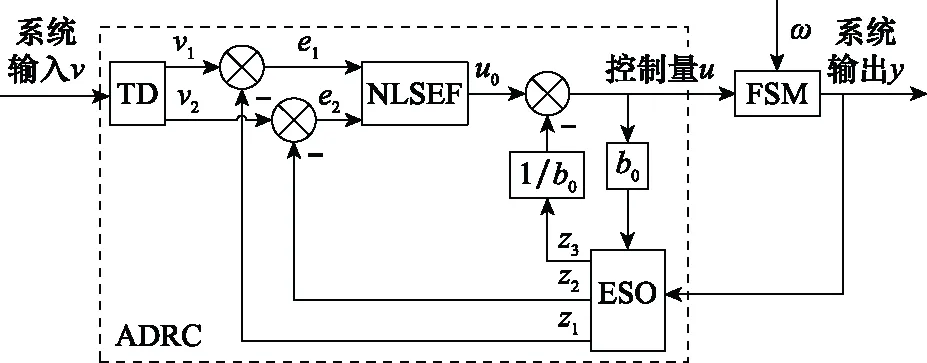
圖2 ADRC結(jié)構(gòu)圖Fig.2 Structure diagram of ADRC
這里設(shè)定b0已知,其中ω為外界干擾。ADRC各部分對應(yīng)的離散算法表示如下。
(1) TD方程
(2)
其中,fhan的表達(dá)式為
(3)
(2) ESO方程
(4)
(5)
(3) NLSEF方程
(6)
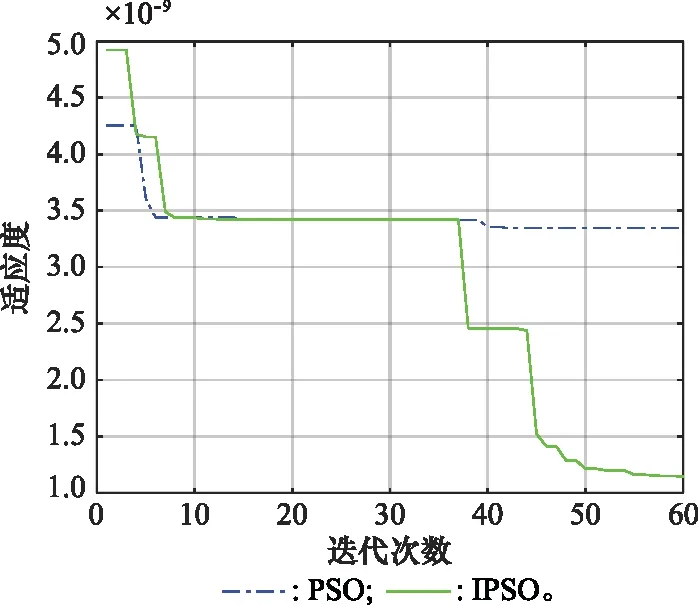
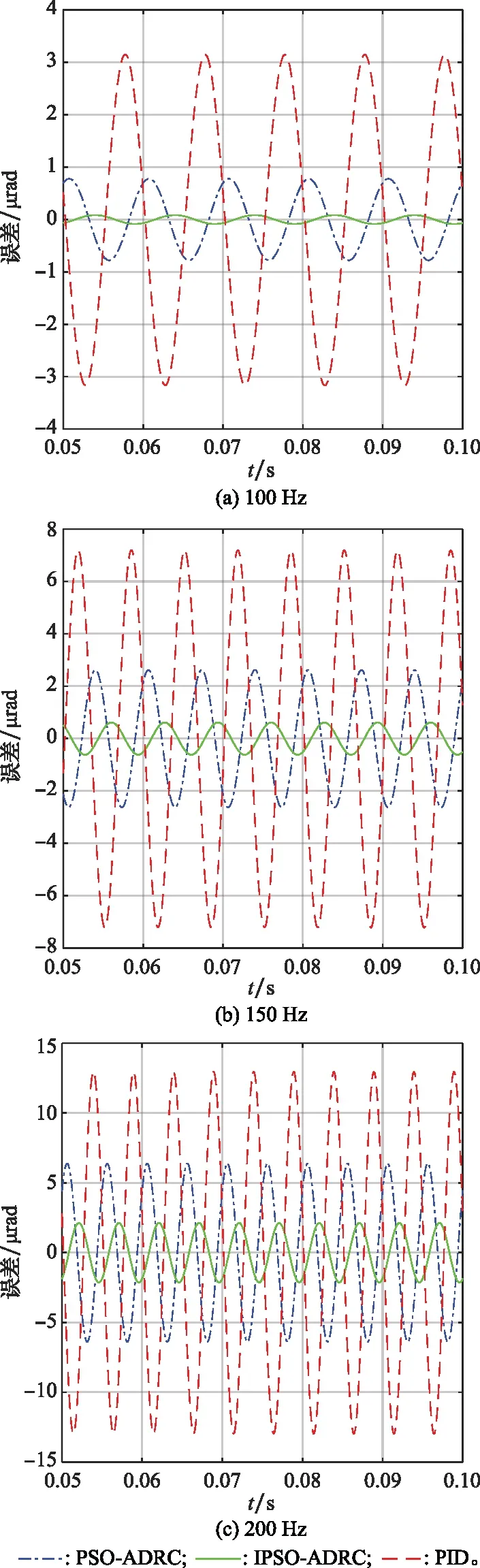
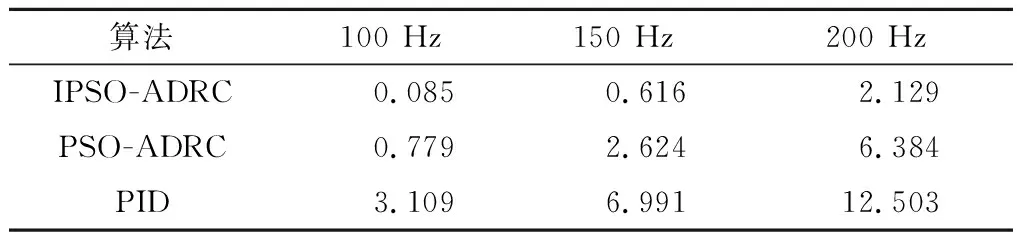
式中:0 PSO是在1995年Eberhart和Kennedy基于對鳥群覓食行為的研究,提出的一種解決最優(yōu)化問題的群體智能算法[19-22]。PSO中每一個粒子的位置都代表所優(yōu)化問題的一個解,粒子會根據(jù)算法優(yōu)化過程中自身所到達(dá)的離食物最近的位置pbest和當(dāng)前迭代次數(shù)中所有粒子距離食物最近的位置gbest計(jì)算下一刻自身的速度,從而更新自己的位置[23-24]。設(shè)某一區(qū)域內(nèi)有j個粒子,則第i個粒子第k+1次迭代速度更新公式和位置更新公式如下: (7) (8) 式中:w為慣性權(quán)重,表示上一次迭代速度對當(dāng)前速度的影響,傳統(tǒng)PSO中該值一般取0.9;c1,c2為學(xué)習(xí)因子,表示當(dāng)前粒子對其之前迭代過程中的最優(yōu)值和當(dāng)前迭代過程中所有粒子中的最優(yōu)值的學(xué)習(xí)能力,通常取為2;r1,r2為0到1之間的隨機(jī)數(shù)。 在傳統(tǒng)的PSO中,慣性權(quán)重是一個常值,但慣性權(quán)重的取值在PSO搜索的不同階段有著不同的作用,PSO在迭代剛開始時應(yīng)取較大的慣性權(quán)重,以保證算法能夠做到全局搜索,避免陷入局部最優(yōu),后期應(yīng)取較小慣性權(quán)重,以使得算法能夠更快的收斂。基于此,Shi等提出了慣性權(quán)重線性遞減策略[25],雖然基于該策略設(shè)計(jì)的慣性權(quán)重,不再是一個常值,但慣性權(quán)重的變化率卻是一個常值,即算法停留在全局搜索和局部開發(fā)的迭代次數(shù)一樣,這樣算法未必能夠得到最優(yōu)解。于是,南杰瓊等提出一種慣性權(quán)重按正弦函數(shù)遞減的策略[26],基于該策略設(shè)計(jì)的慣性權(quán)重的改變率隨著迭代次數(shù)的改變在不斷變化,但前期慣性權(quán)重變化速率快,后期慣性權(quán)重變化速率慢,這樣有可能導(dǎo)致算法還沒有全局搜獲完畢就開始進(jìn)行局部搜索,且進(jìn)行局部搜索的速度慢。因此,慣性權(quán)重按正弦函數(shù)遞減的策略也存在有可能使算法陷入局部最優(yōu)和算法后期收斂速度慢的缺陷[27]。 針對上述缺陷,本文提出一種慣性權(quán)重基于箕舌線函數(shù)調(diào)整的IPSO。該算法在迭代前期慣性權(quán)重改變率慢,后期改變率快,更有利于算法全局搜索和局部開發(fā)的切換。其中箕舌線函數(shù)圖形如圖3所示。 圖3 箕舌線函數(shù)Fig.3 Versoria function 圖3中,OM=2a為定圓x2+y2-2ay=0的直徑,將x軸繞O(0,0)點(diǎn)逆時針旋轉(zhuǎn)θ度,分別交直線y=2a于N點(diǎn),交圓于A點(diǎn),過點(diǎn)A,N分別做x,y軸的平行線相交于點(diǎn)P,θ由0°逐漸增大為180°,則P點(diǎn)的軌跡稱為箕舌線。 其中箕舌線的直角坐標(biāo)方程如下: (9) 式(9)中對x求二階導(dǎo)數(shù)得到: (10) (11) 式中:wmin,wmax為慣性權(quán)重最小值和最大值;ηi,ηmax為當(dāng)前迭代次數(shù)和最大迭代次數(shù),令h(i)=ηi/ηmax,并化簡得 (12) 為了驗(yàn)證本文對標(biāo)準(zhǔn)PSO改進(jìn)方式的有效性,下面將通過優(yōu)化算法里面幾個經(jīng)典的測試函數(shù),對改進(jìn)前后PSO的性能進(jìn)行測試。 為了驗(yàn)證本文對PSO改進(jìn)方式的有效性,采用5種不同的測試函數(shù)進(jìn)行測試,先后采取IPSO和PSO分別求解。另外,為了驗(yàn)證IPSO與其他優(yōu)化算法相比的優(yōu)越性,也將遺傳算法(genetic algorithm,GA)[28]和蜻蜓算法(dragonfly algorithm, DA)[29]用于求解上述5種測試函數(shù)。其中上述4種算法的種群規(guī)模均為40,迭代次數(shù)均為200。由于4種算法中均有隨機(jī)數(shù),故每種算法隨機(jī)測試30次,并記錄30次測試過程中4種算法的平均值和最小值,若計(jì)算結(jié)果小于1×10-16,則記為0,具體的測試結(jié)果如表1所示。 表1 5種不同測試函數(shù)的測試結(jié)果 從表1中可以看出,對這5個測試函數(shù),IPSO幾乎都能夠找到理論最小值,且30次測試過程中無論是平均值還是最小值均優(yōu)于PSO。與GA、DA相比,在某些函數(shù)優(yōu)化方面也具有一定的優(yōu)越性。另外也可看出,標(biāo)準(zhǔn)PSO算法由于慣性因子是一個常值,不能夠很好地平衡算法的全局搜索和局部開發(fā)的能力,測試時取0.9,雖然PSO算法可以做到全局搜索,但對數(shù)據(jù)的開發(fā)程度不夠,導(dǎo)致30次測試過程中都沒能夠找到理論最小值。下面將IPSO用于優(yōu)化ADRC的5個關(guān)鍵參數(shù),以解決ADRC參數(shù)用人工試湊法整定效率低的問題,然后將基于IPSO的ADRC用于FSM控制,以提高FSM跟蹤高頻信號時的跟蹤精度和擾動抑制能力。 選取系統(tǒng)的ITAE值作為優(yōu)化算法的適應(yīng)度函數(shù),具體ITAE值表達(dá)式如下: (13) 式中:err(t)是控制系統(tǒng)中的誤差信號,t是仿真時間。 算法流程圖如圖4所示。基于IPSO優(yōu)化ADRC的具體步驟如下。 步驟1參數(shù)初始化。確定粒子群的規(guī)模n、慣性權(quán)重最大值wmax和最小值wmin、最大迭代次數(shù)ηmax、學(xué)習(xí)權(quán)重c1和c2的取值、最小適應(yīng)度aim、粒子位置和速度的上下界。 步驟2將IPSO中粒子的位置代替ADRC中待優(yōu)化的5個參數(shù)。 步驟3將步驟2得到的參數(shù),代入模型中,進(jìn)行仿真,并根據(jù)式(13)計(jì)算每個粒子的適應(yīng)度。 步驟4通過最小值函數(shù),計(jì)算粒子群的個體極值pbest和全局極值gbest。 步驟5判斷gbest是否滿足大于aim,若滿足則運(yùn)行步驟6,若不滿足則跳到步驟8。 步驟6判斷當(dāng)前迭代次數(shù)是否滿足等于ηmax,若滿足則進(jìn)行步驟8,否則進(jìn)行步驟7。 步驟7根據(jù)式(12)更新慣性權(quán)重w,并根據(jù)式(7)和式(8)計(jì)算下一代粒子群的位置,迭代次數(shù)加1,并返回到步驟2。 步驟8算法結(jié)束,輸出gbest。 圖4 IPSO算法優(yōu)化ADRC流程圖Fig.4 ADRC flow chart of IPSO algorithm optimizarion FSM作為空間激光通信精跟蹤系統(tǒng)中的核心部件,采用系統(tǒng)辨識的方法確定FSM從電壓輸入到位置輸出的開環(huán)傳遞函數(shù)如下: (14) 仿真時參數(shù)設(shè)置如下:粒子群的規(guī)模為20,最大迭代次數(shù)為60,學(xué)習(xí)因子均為2,IPSO算法中慣性權(quán)重的最大值為0.9,最小值為0.4,PSO算法中慣性權(quán)重取值為0.9。本文在韓京清研究員提出的基于采樣步長的冪次形式表示的經(jīng)驗(yàn)公式的基礎(chǔ)上,又采用試湊的方法確定粒子群落的一組初始參數(shù),在初始參數(shù)的基礎(chǔ)上進(jìn)行適當(dāng)?shù)臄U(kuò)充,選取PSO與IPSO中粒子位置上下界為:ub=[22 000,3×108,1×1012,150,0.12],lb=[10 000,1×108,2×108,20,0.001],其中ADRC中除了需要優(yōu)化的5個參數(shù),其他參數(shù)取值如下:r=900 000,δ=0.1,h=h0=0.000 1,a1=0.5,a2=1.25。 本文中FSM作為空間激光通信中精跟蹤的核心部件,需要與粗跟蹤轉(zhuǎn)臺組成復(fù)合軸系統(tǒng),故FSM的作用是消除粗跟蹤轉(zhuǎn)臺的殘差,以提高整個復(fù)合軸系統(tǒng)的跟蹤精度。在工程實(shí)際中,粗跟蹤轉(zhuǎn)臺可將跟蹤誤差控制±300 μrad,故對精跟蹤系統(tǒng)而言,主要考慮其對幅值為300 μrad的高頻信號的跟蹤能力。另外,F(xiàn)SM所處的環(huán)境存在較多的外部擾動,其中對跟蹤結(jié)果影響較大的是衛(wèi)星平臺振動。由歐洲航天局對OLYMPUS衛(wèi)星進(jìn)行的星體振動測試可知,對空間光通信影響較大的頻率主要在100 Hz以內(nèi),另外其星體振動的功率譜密度函數(shù)為s(f)=160/(1+f2)(μrad2/Hz)[30],根據(jù)歐洲航天局給出的功率譜密度函數(shù),設(shè)計(jì)一個濾波器以模擬衛(wèi)星的平臺振動,該濾波器的傳遞函數(shù)為 (15) 該濾波器的輸入端為高斯白噪聲,輸出端為衛(wèi)星平臺振動的模擬信號,該模擬信號的功率譜密度函數(shù)不是一個常數(shù),故該噪聲為有色噪聲。圖5(a)為模擬的衛(wèi)星平臺振動信號,圖5(b)為平臺振動信號的幅頻響應(yīng)曲線。 圖5 衛(wèi)星平臺振動模擬信號及其幅頻響應(yīng)Fig.5 Satellite platfrom vibration simulation signal and itsamplitude frequency response 為了測試基于IPSO的ADRC(IPSO-ADRC)、基于PSO的ADRC(PSO-ADRC)和PID控制器的控制性能(其中PID控制器參數(shù)為kp=250,ki=80,kd=0.03,該控制器參數(shù)通過試湊法取得),在考慮衛(wèi)星平臺振動情況下,系統(tǒng)中輸入幅值為300 μrad,頻率為100 Hz的高頻正弦信號,分別用IPSO、PSO優(yōu)化ADRC參數(shù),優(yōu)化后得到的5個參數(shù)和算法的最小適應(yīng)度如表2所示,兩種算法的適應(yīng)度隨算法迭代次數(shù)變化情況如圖6所示。 表2 兩種算法得到的5個參數(shù)和最小適應(yīng)值(FSM跟蹤高頻正弦信號) 圖6 適應(yīng)值隨迭代次數(shù)變化過程Fig.6 Process of fitness value changing with number of iterations 從圖6中可以明顯看出,在算法搜索后期IPSO與PSO相比具有更快的收斂速度,能夠找到對優(yōu)化問題而言更優(yōu)的解。在跟蹤幅值300 μrad、頻率100 Hz的高頻正弦信號時,IPSO-ADRC、PSO-ADRC和PID控制器控制的FSM的給定與反饋曲線圖和穩(wěn)態(tài)誤差對比圖如圖7(a)和圖8(a)所示。另外,為了測試控制器的對不同頻率正弦信號的跟蹤能力,在控制器參數(shù)保持不變的情況下,分別在系統(tǒng)中輸入幅值300 μrad,頻率為150 Hz、200 Hz的高頻正弦信號,得到3種控制器控制FSM的給定與反饋曲線圖和穩(wěn)態(tài)誤差對比圖如圖7(b)、圖7(c)和圖8(b)、圖8(c)所示。圖7和圖8中藍(lán)色點(diǎn)劃線表示PSO-ADRC控制器的控制性能,綠色實(shí)線表示IPSO-ADRC控制器的控制性能,紅色虛線表示普通PID控制器的控制性能。另外,圖7中黑色點(diǎn)劃線表示系統(tǒng)的輸入信號。 圖7 跟蹤不同頻率正弦信號時給定與反饋對比圖Fig.7 Given and feedback comparison chart when tracking sinesignals of different frequencies 圖8 跟蹤不同頻率正弦信號時穩(wěn)態(tài)誤差對比圖Fig.8 Steady-state error comparison chart when tracking sinusoidal signals of different frequencies 從圖7中可以看出,3種控制器控制的FSM到達(dá)波峰時的相位與給定輸入到達(dá)波峰時的相位基本保持一致,故基于3種控制器的控制系統(tǒng)的穩(wěn)態(tài)誤差主要是由輸入與輸出的幅值差異所造成的,具體3種控制器跟蹤100 Hz、150 Hz、200 Hz高頻正弦信號穩(wěn)態(tài)誤差的最大值如表3所示。 表3 穩(wěn)態(tài)誤差最大值 從圖8和表3可以看出,3種控制器的穩(wěn)態(tài)誤差的最大值都隨著輸入信號頻率的增加而增大,跟蹤以上3種任一頻率,IPSO-ADRC的穩(wěn)態(tài)誤差的最大值與其他兩種控制器相比都要小,在跟蹤100 Hz、150 Hz正弦信號時,IPSO-ADRC可將穩(wěn)態(tài)誤差控制在±2 μrad以內(nèi),在跟蹤200 Hz正弦信號時,IPSO-ADRC可以將穩(wěn)態(tài)誤差控制在±2 μrad附近,基本滿足空間激光通信對系統(tǒng)跟蹤精度的要求。 本文為了提高FSM的跟蹤精度和擾動抑制能力,提出了一種基于IPSO的ADRC策略。在考慮衛(wèi)星平臺振動的情況下,該控制策略控制的FSM在跟蹤幅值不超過300 μrad,頻率不超過150 Hz的正弦信號時,跟蹤精度優(yōu)于2 μrad,同時需要指出的是,本設(shè)計(jì)方案未考慮測量噪聲和輸入噪聲對系統(tǒng)跟蹤精度的影響,這也是以后需要研究的內(nèi)容。另外,基于IPSO的ADRC與基于PSO的ADRC、PID控制器相比,也具有很好的控制效果,可以明顯提升系統(tǒng)跟蹤精度和抗干擾的能力。綜上,本文可以得出以下結(jié)論。 (1) 將PSO中慣性因子由常值轉(zhuǎn)變?yōu)榛诨嗑€函數(shù)調(diào)整,可以較好地平衡算法的全局搜索和局部開發(fā)的能力,找到對優(yōu)化問題而言更優(yōu)的解。 (2) 將基于IPSO的ADRC用于FSM控制,與PID控制器相比可以明顯提升FSM跟蹤高頻信號時的跟蹤精度和擾動抑制能力。3 PSO及其改進(jìn)
3.1 PSO描述
3.2 IPSO

3.3 測試函數(shù)

4 基于IPSO優(yōu)化ADRC
4.1 適應(yīng)度函數(shù)的選取

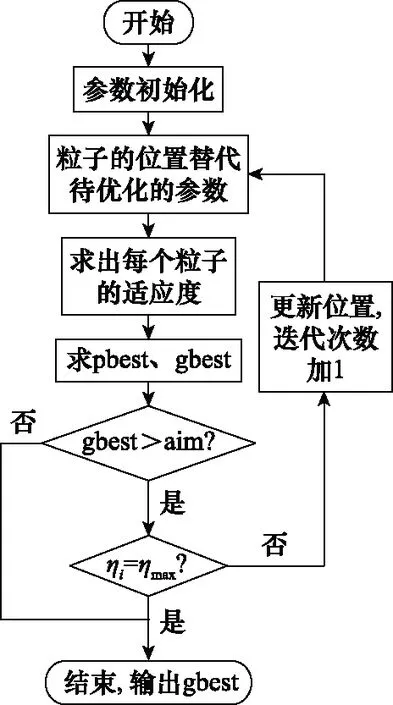
4.2 算法流程
5 數(shù)值仿真
5.1 FSM模型的建立
5.2 參數(shù)設(shè)置
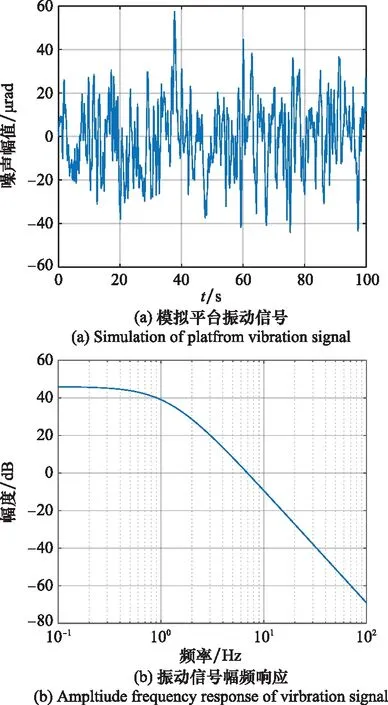
5.3 數(shù)值仿真實(shí)驗(yàn)


6 結(jié) 論
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00