
基于特征模型的失效航天器消旋控制
2021-11-30 13:34:20李超何英姿胡勇
航空學(xué)報(bào) 2021年11期
李超,何英姿,胡勇,2
1.北京控制工程研究所,北京 100190
2.空間智能控制技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京 100094
伴隨著人類太空探索活動的日益增多,空間科學(xué)技術(shù)的研究越來越受到關(guān)注。由于硬件故障或燃料耗盡,每年都有大量航天器無法繼續(xù)作業(yè),嚴(yán)重影響其任務(wù)效益。失效航天器嚴(yán)重影響了人類的太空探索活動。一方面,由于喪失姿軌控能力,失效航天器會與其他航天器發(fā)生碰撞,產(chǎn)生大量空間碎片[1],這些碎片又會撞擊其他航天器,產(chǎn)生越來越多空間碎片,甚至形成一個(gè)空間碎片帶[2]。另一方面,廢棄航天器占用了寶貴的軌道資源。Liou等估計(jì)每年至少要有5個(gè)大型廢棄目標(biāo)被移除[3],才能保證當(dāng)前軌道資源的穩(wěn)定。服務(wù)衛(wèi)星通過執(zhí)行一系列空間操作,捕獲并移除失效航天器,可以釋放軌道資源,減少空間碎片,降低航天器碰撞的風(fēng)險(xiǎn)。
太空中的航天器大多屬于非合作目標(biāo)。采用空間機(jī)械臂對非合作目標(biāo)的在軌抓捕存在動作不配合、沒有合作識別的抓捕點(diǎn)等問題[4]。此外,大多數(shù)目標(biāo)已經(jīng)失效,不具備姿態(tài)調(diào)整能力。由于長期失控,受太陽光壓、重力梯度等攝動力矩及失效前自身殘余角動量等因素的影響,這些失效衛(wèi)星、火箭末級等目標(biāo)往往會呈現(xiàn)出翻滾狀態(tài),給抓捕點(diǎn)的識別增加了難度,并極有可能發(fā)生目標(biāo)與機(jī)械臂的碰撞。對翻滾非合作目標(biāo)的消旋是指利用外部控制力矩衰減目標(biāo)三軸角速度,最終實(shí)現(xiàn)目標(biāo)姿態(tài)穩(wěn)定的過程[5]。消旋有助于服務(wù)衛(wèi)星快速跟蹤目標(biāo)抓捕點(diǎn)位置并方便與目標(biāo)姿態(tài)同步化處理[6],給后續(xù)的抓捕操作提供了方便。
消旋方式主要有氣體沖擊、靜電力、電磁力、離子束、激光等非接觸式消旋以及減速刷消旋、機(jī)械脈沖消旋、空間繩系機(jī)器人消旋等接觸式消旋[7]。針對質(zhì)量較大的高速翻滾目標(biāo),用減速刷與目標(biāo)接觸消旋的方案實(shí)現(xiàn)簡單,可以提供充足的阻尼力矩,且減速刷的柔性起到緩沖作用[8],降低碰撞的風(fēng)險(xiǎn),是當(dāng)前可行的工程應(yīng)用方案。近些年,國內(nèi)外學(xué)者圍繞減速刷接觸式消旋展開了大量研究。Liu等[9-10]用Hertz理論和運(yùn)動幾何關(guān)系建立了減速刷與目標(biāo)的接觸碰撞模型,該模型可以很好地模擬消旋時(shí)目標(biāo)的平動和轉(zhuǎn)動運(yùn)動。段文杰等[11]針對服務(wù)衛(wèi)星消旋時(shí)基座的位置控制和姿態(tài)控制問題,建立減速刷的線彈性接觸動力學(xué)模型,基于該模型設(shè)計(jì)前饋與反饋結(jié)合的控制器,有效抑制了消旋時(shí)接觸碰撞力對服務(wù)衛(wèi)星位姿穩(wěn)定控制帶來的擾動。Duan等[12]針對接觸碰撞模型的參數(shù)辨識問題,設(shè)計(jì)了一套由機(jī)械臂、減速刷、測力平臺構(gòu)成的地面物理實(shí)驗(yàn)系統(tǒng),基于該系統(tǒng)測量了模型的物理參數(shù)。吳昊等[13]針對消旋時(shí)機(jī)械臂的穩(wěn)定控制問題,采用滑模變結(jié)構(gòu)方法設(shè)計(jì)空間機(jī)器人關(guān)節(jié)控制器,使得在接觸力的擾動下機(jī)械臂末端仍能到達(dá)預(yù)定的消旋位置。Wang等[14]針對消旋中的接觸控制問題,設(shè)計(jì)了一種最優(yōu)接觸控制方法,并給出章動收斂的條件,該控制方法可以有效抑制目標(biāo)章動。
在接觸式消旋問題中,最終的消旋效果與很多因素有關(guān)。減速刷的接觸部位、接觸方向、接觸時(shí)間等物理量均會對消旋作用產(chǎn)生影響[15-16]。這些物理量一方面由目標(biāo)的速度和位姿決定,另一方面由減速刷的位姿決定。上述因素導(dǎo)致了接觸碰撞過程建模的模型不確定性,導(dǎo)致基于精確建模的消旋控制方法難以實(shí)現(xiàn)。
基于特征模型的黃金分割自適應(yīng)控制是由吳宏鑫院士在20世紀(jì)80年代初提出的方法。所謂特征模型,即結(jié)合對象動力學(xué)特征、環(huán)境特征和控制性能要求而不是僅以對象精確動力學(xué)分析所建立的模型[17]。特征模型建立的形式比原對象的動力學(xué)方程簡單,易于控制器設(shè)計(jì),工程實(shí)現(xiàn)容易、方便。自被提出至今,研究學(xué)者圍繞特征模型黃金分割控制方法開展了豐富的理論研究[18-19],同時(shí)該方法在神舟飛船再入返回控制、交會對接等重大實(shí)際工程中也得到了驗(yàn)證[20]。
目前的研究圍繞接觸碰撞建模、接觸模型參數(shù)辨識、消旋服務(wù)衛(wèi)星的位姿控制、接觸控制等獲得了大量成果。然而,由于接觸碰撞過程的模型不確定性強(qiáng),導(dǎo)致基于精確建模的消旋控制方法難以實(shí)現(xiàn)。而特征模型具有簡化建模的特點(diǎn),因此本文基于特征模型理論,研究接觸式消旋控制問題,研究思路為:首先依據(jù)接觸式消旋的物理機(jī)理得到系統(tǒng)動力學(xué)模型,然后根據(jù)動力學(xué)模型特性建立特征模型,接著基于特征模型設(shè)計(jì)黃金分割自適應(yīng)控制器,最后通過消旋實(shí)驗(yàn)驗(yàn)證該控制器的可行性。
本文研究面向一類特定任務(wù),該任務(wù)具備兩個(gè)特點(diǎn)。一方面,任務(wù)中的目標(biāo)已經(jīng)長期在軌,達(dá)到了繞最大慣量軸自旋穩(wěn)定的狀態(tài);另一方面,任務(wù)的實(shí)時(shí)性要求不高,服務(wù)衛(wèi)星可以等待目標(biāo)穩(wěn)定后再執(zhí)行下一次消旋動作。在對這類任務(wù)設(shè)計(jì)控制器時(shí),主要考慮繞最大慣量軸方向消旋力矩的控制問題。
1 系統(tǒng)動力學(xué)建模
1.1 模型描述
典型的接觸式消旋場景如圖1所示。左側(cè)為翻滾的空間目標(biāo),它含有一個(gè)中心為剛性的衛(wèi)星本體和一對太陽帆板。Oxyz是目標(biāo)的主慣量坐標(biāo)系,各坐標(biāo)軸都與通過目標(biāo)質(zhì)心O的主慣量軸一致。H是目標(biāo)的角動量,α為垂直于目標(biāo)角動量的平面。右側(cè)為服務(wù)衛(wèi)星,其質(zhì)心為O1,它上面裝配了空間操作機(jī)械臂,機(jī)械臂的末端執(zhí)行機(jī)構(gòu)是用于消旋的減速刷。
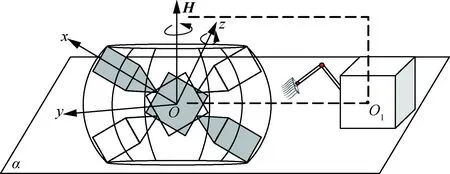
圖1 消旋場景示意圖
在推力器的作用下,服務(wù)衛(wèi)星可以對目標(biāo)繞飛跟蹤。服務(wù)衛(wèi)星使用傳感器實(shí)時(shí)測量目標(biāo)角速度,并通過機(jī)械臂操控減速刷與目標(biāo)接觸實(shí)現(xiàn)消旋。由于本文主要關(guān)注減速刷位姿對目標(biāo)消旋的影響,為了突出主要問題,分析過程需要做出一些假設(shè)忽略:
1) 首先,由于機(jī)械臂具備一定的位姿調(diào)整能力,可以抑制接觸力對減速刷固定端位置的擾動,忽略接觸力對減速刷固定端位置的影響,認(rèn)為接觸碰撞時(shí)減速刷固定端位置近似保持不變。
2) 同時(shí),由于服務(wù)衛(wèi)星機(jī)械臂具備一定的響應(yīng)速度,認(rèn)為每一次接觸前機(jī)械臂已經(jīng)操縱減速刷達(dá)到指定位姿。
3) 此外,假設(shè)傳感系統(tǒng)可以實(shí)現(xiàn)對目標(biāo)運(yùn)動狀態(tài)的感知,消旋前可以獲得目標(biāo)的角速度、姿態(tài)角等信息。
4) 最后,由于服務(wù)衛(wèi)星在進(jìn)行一次消旋后,可以等待足夠長時(shí)間后再進(jìn)行下一次消旋,消旋系統(tǒng)的控制頻率可以遠(yuǎn)低于目標(biāo)帆板撓性的模態(tài)頻率。因此,在目標(biāo)動力學(xué)建模時(shí)忽略帆板撓性,主要采用剛體模型。
1.2 消旋系統(tǒng)的動力學(xué)模型
1.2.1 目標(biāo)動力學(xué)模型
設(shè)目標(biāo)繞Oxyz坐標(biāo)軸的主慣量矩是Ix、Iy、Iz,各軸的角速度分量分別是ωx、ωy、ωz。在此本體坐標(biāo)系中,慣量積等于零。當(dāng)外力矩為零時(shí),動力學(xué)方程為[21]
(1)
當(dāng)三軸外力矩分別為Tx、Ty、Tz時(shí),對應(yīng)的動力學(xué)方程為
(2)
1.2.2 接觸碰撞模型
圖2是目標(biāo)與減速刷接觸碰撞過程的典型情況示意圖。圖2(a)為初始接觸時(shí)刻的立體圖,左側(cè)為失效衛(wèi)星,目標(biāo)繞MN軸自旋,O為失效衛(wèi)星質(zhì)心,圖中畫出了失效衛(wèi)星的一側(cè)太陽帆板,P為消旋標(biāo)記點(diǎn),位于帆板外楞中點(diǎn);右側(cè)為服務(wù)衛(wèi)星操控的消旋減速刷GF,G為減速刷的固定端,GF此時(shí)與OG共線,并處于自然伸長狀態(tài)。d=|FP|為刷子深入量。圖2(b)為接觸碰撞初始時(shí)刻的俯視圖,此時(shí)GF與帆板平面平行,減速刷與帆板臨界接觸,減速刷沒有發(fā)生形變,接觸力為零。
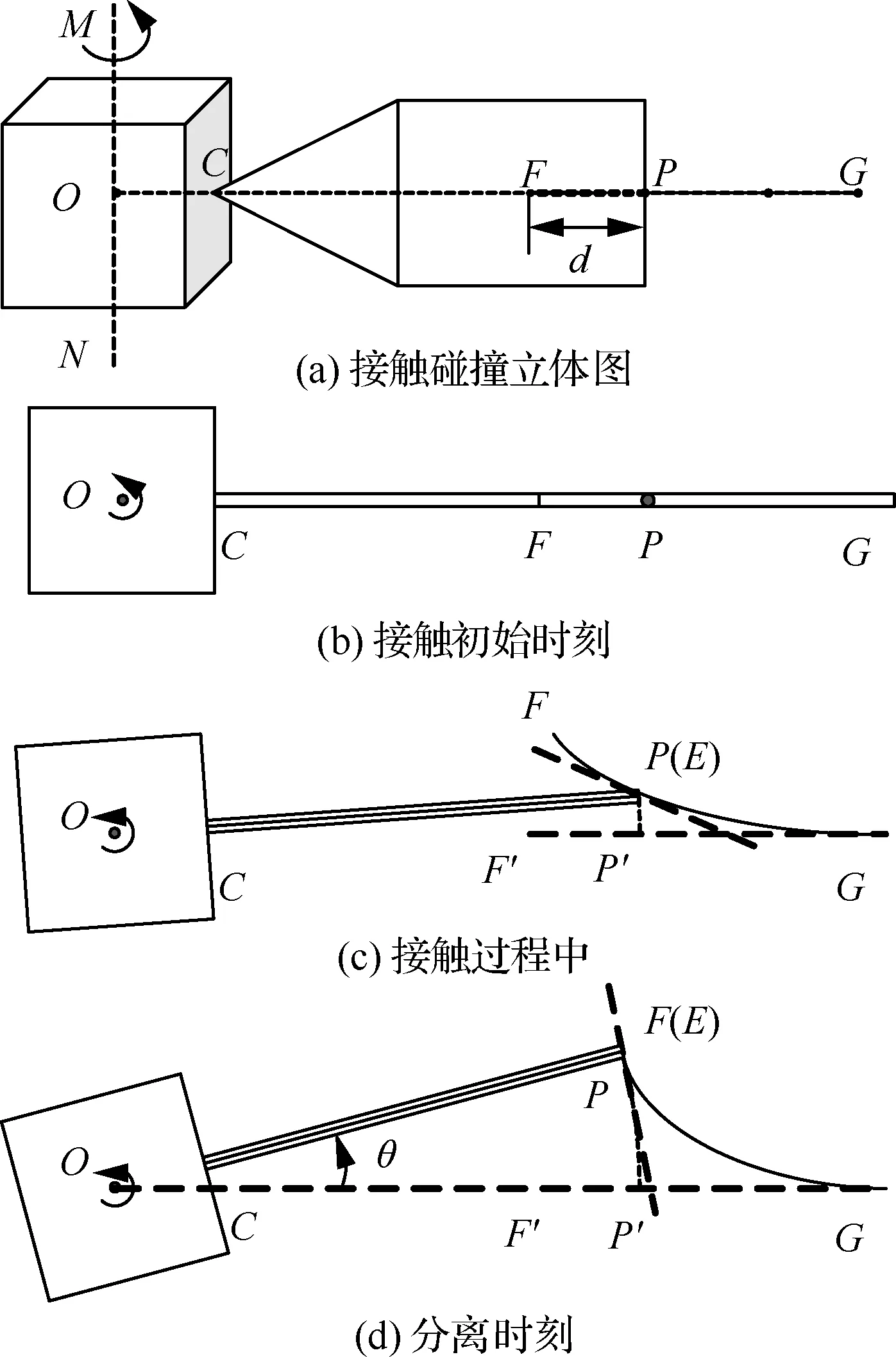
圖2 接觸碰撞過程示意圖
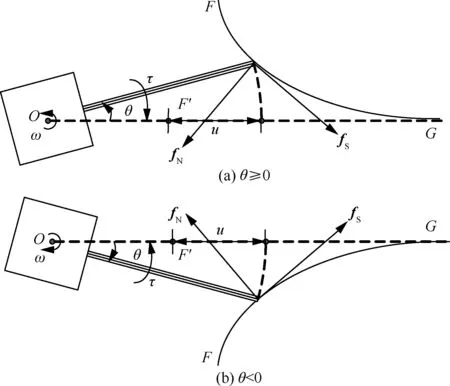
圖2(c)和圖2(d)為兩個(gè)不同接觸時(shí)刻的俯視圖。由于目標(biāo)轉(zhuǎn)動,GF與帆板外楞接觸并發(fā)生形變,GF′為減速刷初始狀態(tài)所在直線,F′、P′分別為接觸碰撞初始時(shí)刻F和P的位置,θ是帆板繞OG轉(zhuǎn)過的轉(zhuǎn)角。圖2(c)和圖2(d)表明隨著消旋過程的進(jìn)行,減速刷形變量逐漸增大。

由于帆板的剛度遠(yuǎn)大于柔性桿的剛度,因此在接觸碰撞時(shí)帆板可以視為剛體,而減速刷可以視為發(fā)生線彈性形變的柔性桿。發(fā)生接觸碰撞時(shí)的力學(xué)分析圖如圖3所示。減速刷GF對帆板的接觸作用力包括壓力fN和摩擦力fS,fN由減速刷的彈性形變產(chǎn)生,fS由帆板外楞相對減速刷滑動產(chǎn)生。uE為E到GF′的距離,θuE為彎曲桿在接觸點(diǎn)E處橫截面的轉(zhuǎn)角。由線彈性材料均值桿彎曲應(yīng)力公式,得壓力fN的大小為[11]
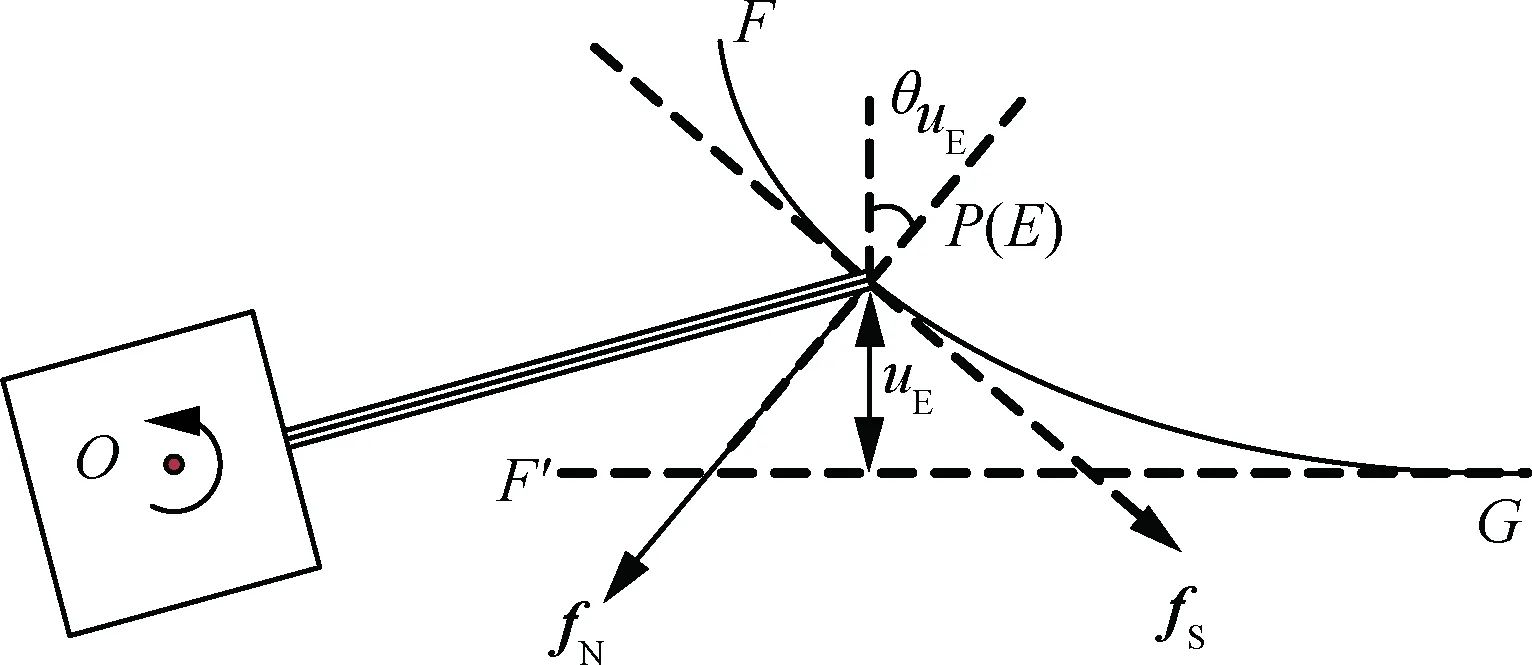
圖3 接觸碰撞力學(xué)分析圖
(3)
式中:EI為材料的抗彎剛度;lGE為G到E的桿件長度。fN與曲線GF在E點(diǎn)的切線垂直。θuE的大小為
(4)
摩擦力fS建模為庫倫摩擦模型,其大小為
fS=μSfN
(5)
式中:μS為滑動摩擦系數(shù)。fS與GF在E點(diǎn)的切線平行,與帆板相對減速刷運(yùn)動的方向相反。
消旋時(shí)的接觸力矩T的表達(dá)式可以寫為
T=rOE×(fN+fS)
(6)
式中:rOE為從O指向E的位移,是接觸力作用的力臂。
自旋軸和目標(biāo)慣性主軸重合時(shí)的典型消旋場景時(shí),消旋接觸作用力與目標(biāo)旋轉(zhuǎn)軸垂直。針對自旋軸不和目標(biāo)慣性主軸重合的情況,服務(wù)衛(wèi)星首先通過自身的感知系統(tǒng)找到目標(biāo)自旋軸的方位,然后施加與自旋軸垂直的接觸力,使得消旋接觸力矩能最大程度衰減目標(biāo)角速度。
獲得的消旋系統(tǒng)動力學(xué)模型將被用于建立接觸式消旋的特征模型,通過分析動力學(xué)的特性可以確定特征模型中特征參數(shù)的取值范圍,便于特征參數(shù)的辨識。
2 控制器設(shè)計(jì)
主要考慮最大慣量軸方向角速度的消旋控制。為了敘述方便,不妨設(shè)z軸為最大慣量軸,該軸的轉(zhuǎn)動慣量Iz=J,角速度為ωz=ω。控制系統(tǒng)中將刷子的深入量d(圖2(a))作為控制量u,將角速度ω作為被控量。
2.1 特征建模
對于僅繞最大慣量軸旋轉(zhuǎn)的目標(biāo),當(dāng)減速刷不與目標(biāo)接觸時(shí)的動力學(xué)方程為
(7)
當(dāng)減速刷與目標(biāo)接觸時(shí)的動力學(xué)方程為
(8)
式中:τ為施加在最大慣量軸的接觸力矩。
在已知控制量u、目標(biāo)旋轉(zhuǎn)角θ后,根據(jù)圖3的幾何關(guān)系及接觸碰撞動力學(xué)方程(3)~方程(6),通過數(shù)值計(jì)算可以得到接觸力矩τ。由于從u到τ之間存在復(fù)雜的非線性關(guān)系,很難得出顯式的數(shù)學(xué)表達(dá)式,此處不妨將該數(shù)學(xué)關(guān)系記為
τ=f(u,θ)
(9)

(10)
式中:R為余項(xiàng)。u0、θ0分別為控制量和目標(biāo)轉(zhuǎn)角的平衡點(diǎn),由具體消旋任務(wù)確定,一般取為零。將式(10)代入式(8)得到接觸時(shí)的動力學(xué)表達(dá)式為

(11)
式中:

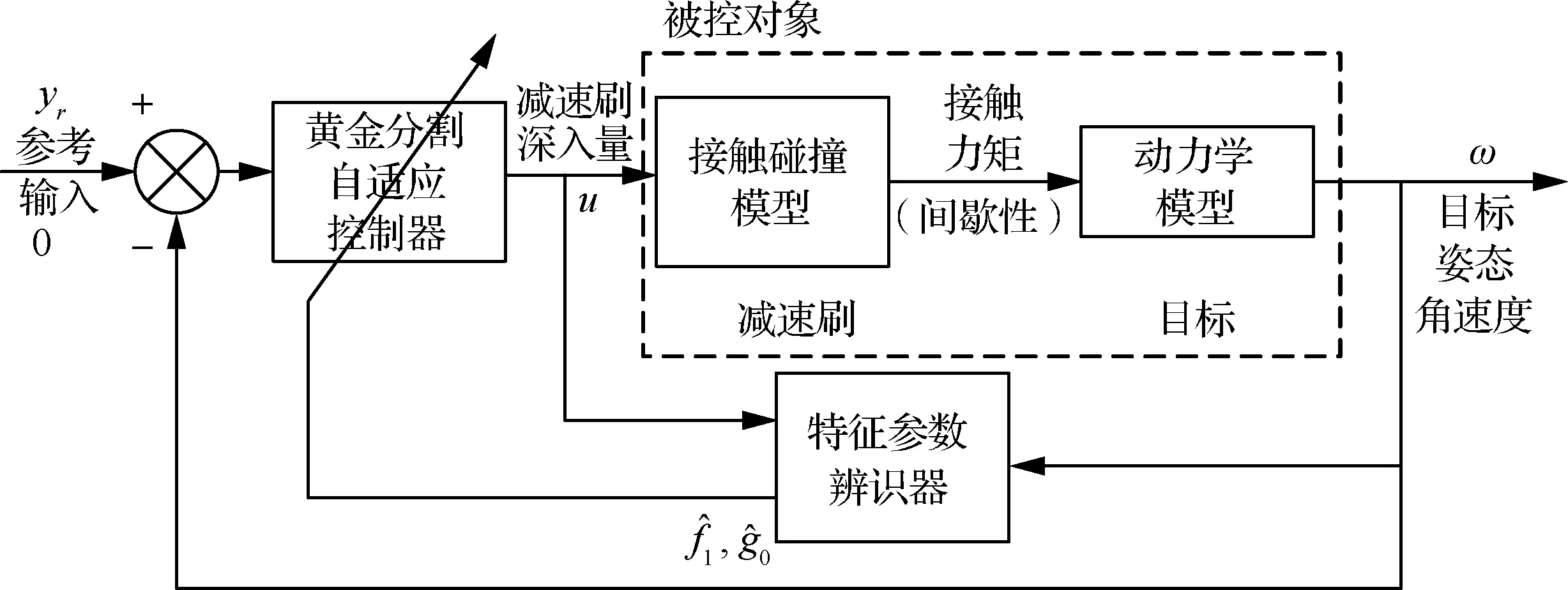
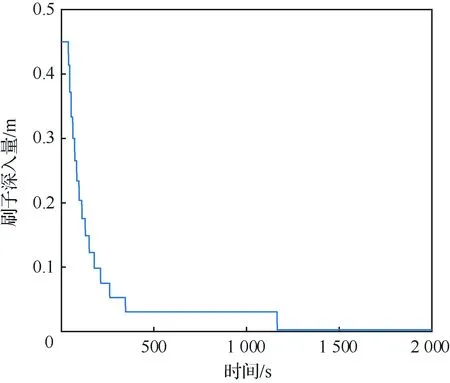
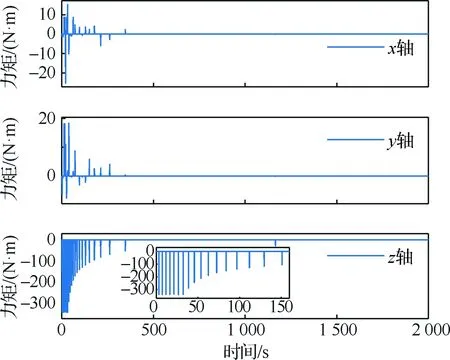
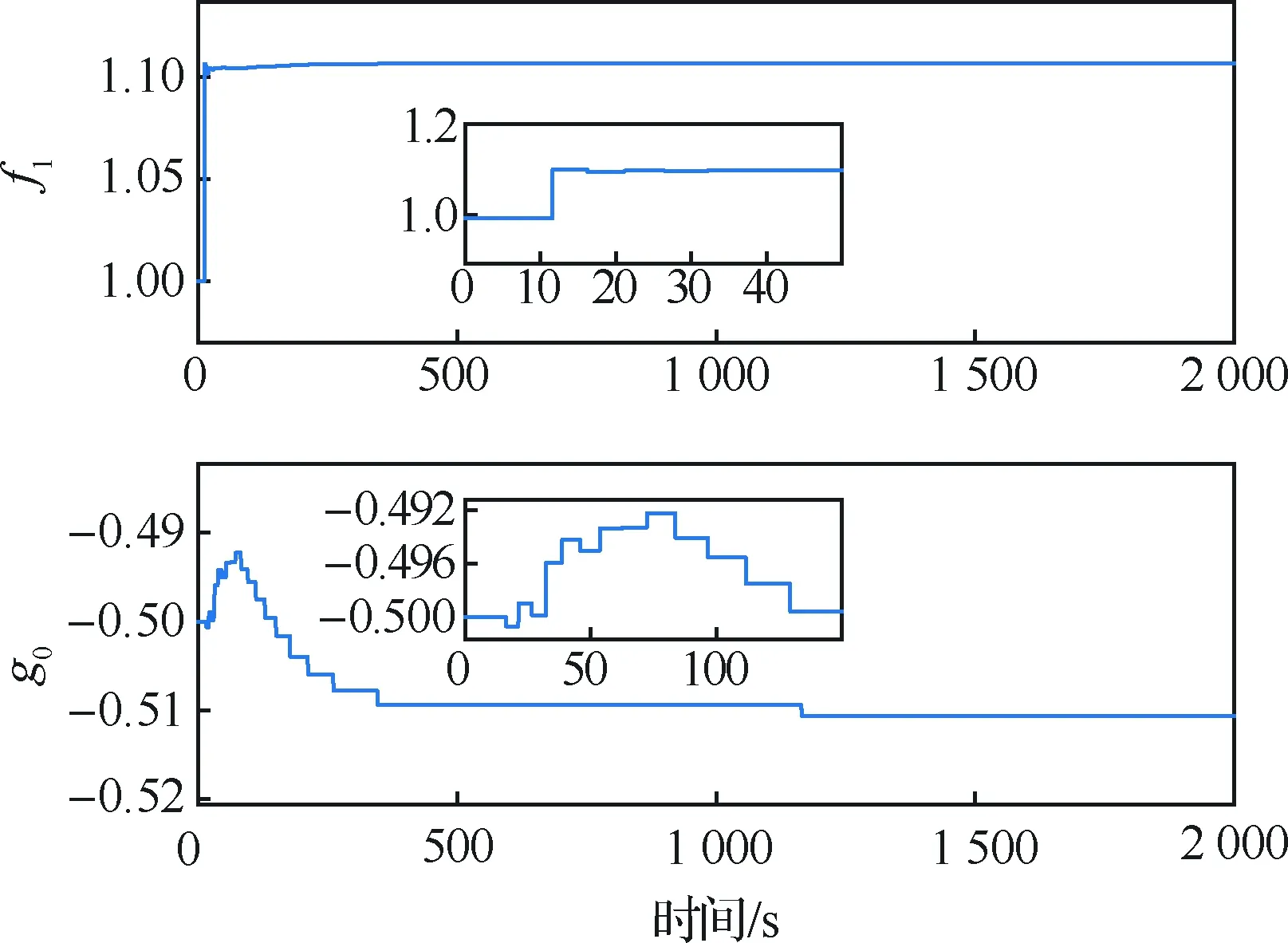
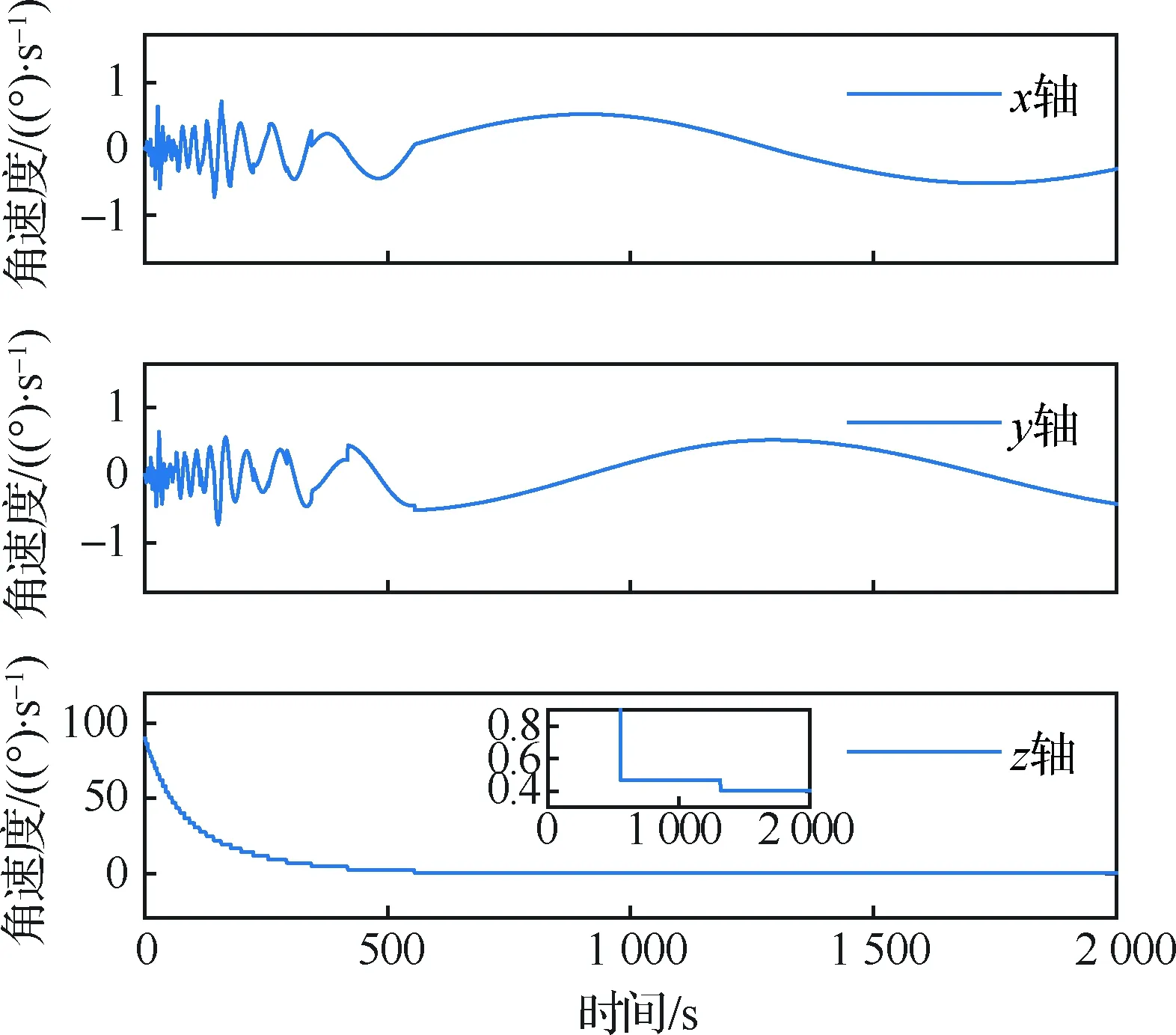
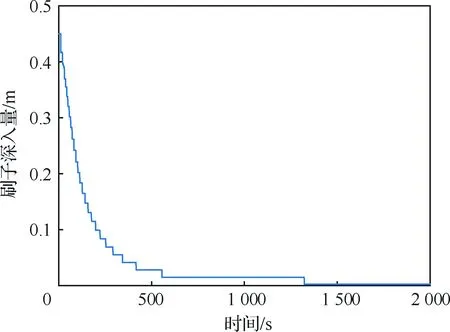
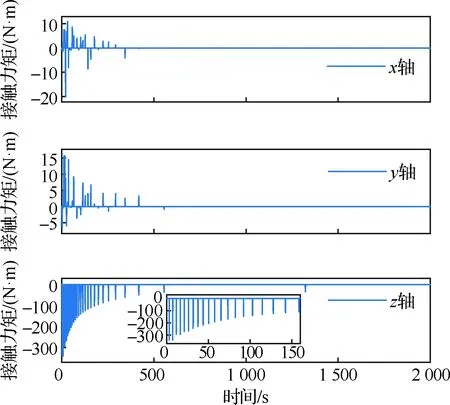
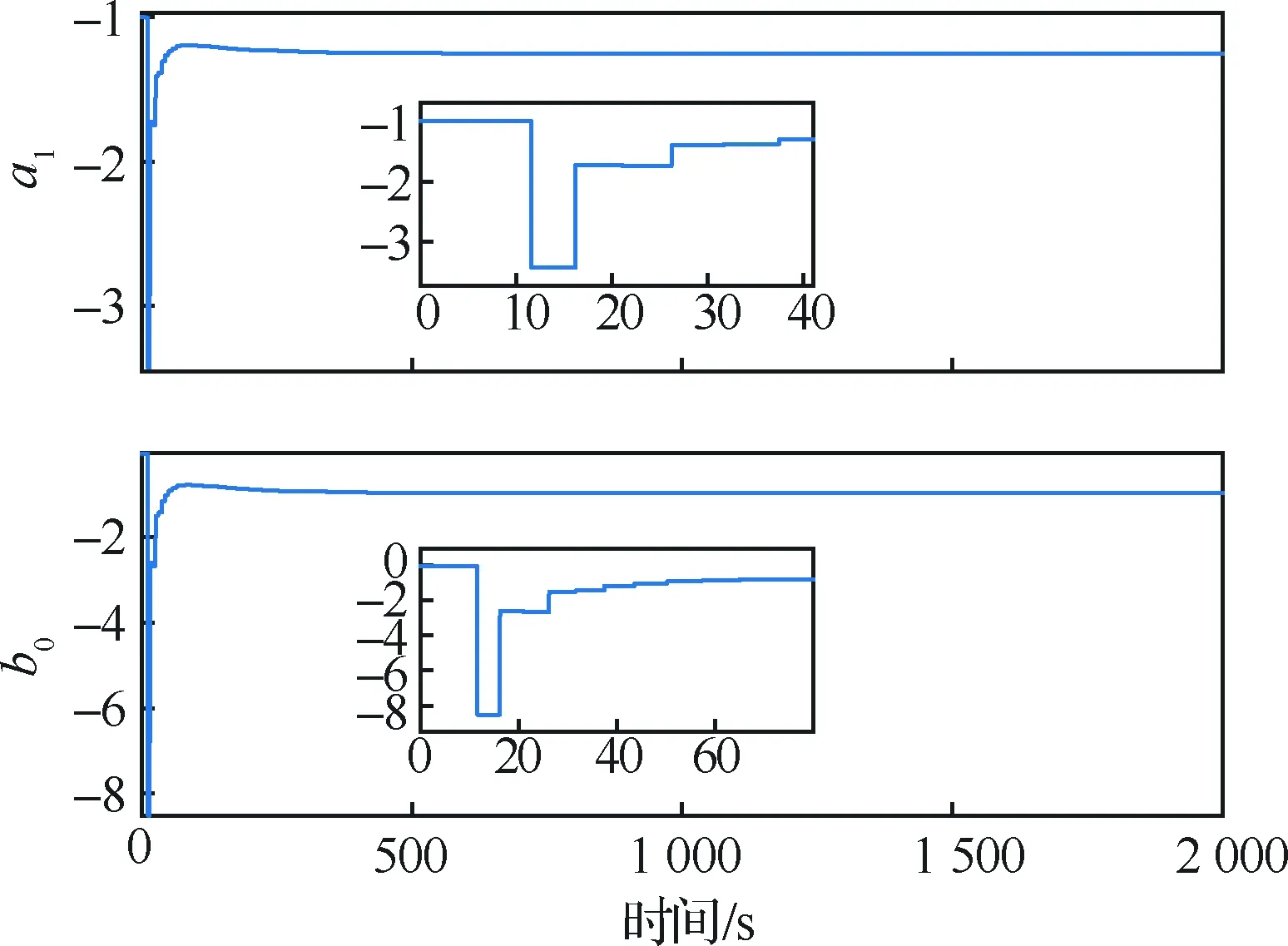
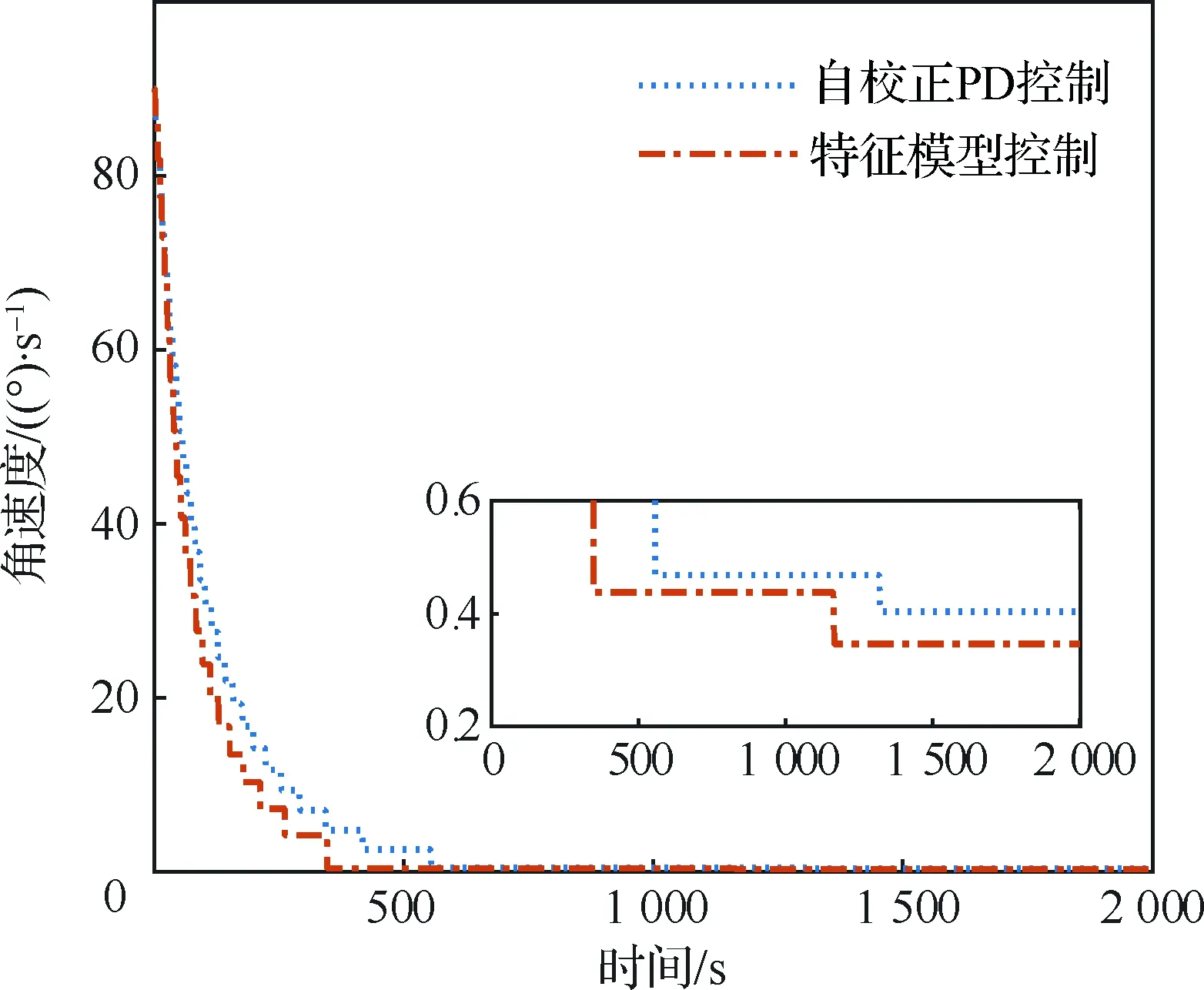
式中:0 (12) 將式(11)代入式(12),經(jīng)過化簡得到 ω(k+1)=ω(k)+Δtk+1bu(k)+Δtk+1δ (13) 式中: 定義壓縮函數(shù),將δ壓縮到系數(shù)中[22],令 (14) 式中:N>0,是一個(gè)很小的常數(shù)。將式(14)代入式(13),得 所以接觸式消旋系統(tǒng)的一階特征模型表達(dá)式為 ω(k+1)=f1(k)ω(k)+g0(k)u(k) (15) 式中:f1(k)和g0(k)是特征參數(shù),其表達(dá)式分別為 建模誤差為 分析特征參數(shù)g0(k)和f1(k)的取值范圍。根據(jù)g0(k)的表達(dá)式: 圖4 接觸力矩與目標(biāo)轉(zhuǎn)角方向相反 (16) (17) (18) 接著分析f1(k)的界,將其表達(dá)式改寫為 (19) (20) L1、L2可以借助計(jì)算機(jī)數(shù)值仿真結(jié)合任務(wù)參數(shù)確定。 設(shè)計(jì)基于一階特征模型的黃金分割自適應(yīng)控制器。所謂黃金分割自適應(yīng)控制方法,是把黃金分割比(l1/l2=0.382/0.618)引入控制器設(shè)計(jì)中而得名。它的主要特點(diǎn)是針對參數(shù)未知的復(fù)雜對象,當(dāng)不允許現(xiàn)場反復(fù)調(diào)試時(shí),黃金分割自適應(yīng)控制能保證系統(tǒng)穩(wěn)定運(yùn)行[23]。解永春和吳宏鑫首次從理論上證明了在參數(shù)估計(jì)收斂后這種黃金分割控制器組成閉環(huán)系統(tǒng)的穩(wěn)定性[24]。胡軍[25]論證了針對輸入輸出相對階為1的被控對象采用基于一階特征模型黃金分割控制的可行性。 圖5 基于特征模型的接觸式消旋黃金分割控制系統(tǒng)框圖 特征參數(shù)辨識器采用遞推最小二乘算法: 式中: 特征參數(shù)的取值范圍由式(18)和式(20)給出。 根據(jù)對象的特征模型表達(dá)式(15),設(shè)計(jì)一階黃金分割自適應(yīng)控制器為 式中:l1為正常數(shù)。由于g0(k)有變號特性,現(xiàn)針對該特性設(shè)計(jì)控制器。將u0(k)重寫為 (21) (22) 由式(18)有 sign[g0(k)]=-sign[ω(k)] (23) 將式(23)代入式(22),得 (24) 根據(jù)式(24)得到最終的控制律為 (25) 式中:λ為防止控制量奇異引入的小的正常數(shù)。 為了驗(yàn)證黃金分割自適應(yīng)控制方法的正確性,將該方法應(yīng)用于柔性減速刷消旋數(shù)學(xué)仿真實(shí)驗(yàn)。實(shí)驗(yàn)設(shè)置一組對照組,采用自校正PD控制方法。為了適應(yīng)非合作目標(biāo)的抓捕,要將目標(biāo)角速度衰減到足夠小。因此,控制目標(biāo)是將目標(biāo)三軸角速度幅值衰減到小于1 (°)/s。 實(shí)驗(yàn)使用的減速刷參數(shù)如表1所示。仿真中將多柔性桿制成的減速刷簡化為一根柔性桿。待消旋目標(biāo)參數(shù)如表2所示。初始時(shí)刻目標(biāo)處于穩(wěn)定自旋狀態(tài),以90 (°)/s的角速度繞z軸旋轉(zhuǎn)。每當(dāng)目標(biāo)繞z軸旋轉(zhuǎn)一周,服務(wù)衛(wèi)星對目標(biāo)消旋一次。實(shí)驗(yàn)假設(shè)服務(wù)衛(wèi)星可以在每次消旋之前獲取目標(biāo)角速度并預(yù)先將減速刷放置到接觸位置。 表1 減速刷參數(shù) 表2 目標(biāo)參數(shù) 為了充分衰減目標(biāo)最大慣量軸角速度而不激發(fā)其他兩軸的角速度,理想情況下消旋接觸力應(yīng)當(dāng)垂直于目標(biāo)最大慣量軸,但實(shí)際工程中總會存在執(zhí)行誤差。因此假設(shè)消旋力矩與最大慣量軸之間存在不超過5°的隨機(jī)夾角。 特征模型消旋實(shí)驗(yàn)采用的自適應(yīng)控制律為式(25),仿真實(shí)驗(yàn)結(jié)果如圖6所示。每次減速刷與目標(biāo)的接觸碰撞都會使目標(biāo)z軸轉(zhuǎn)速“階梯式”降低,當(dāng)t=346.5 s時(shí),角速度為0.438 (°)/s;當(dāng)t=2 000 s時(shí),z軸角速度為0.347 (°)/s。由于存在執(zhí)行誤差,接觸力矩會激發(fā)目標(biāo)x、y軸的角速度。在整個(gè)消旋過程中,x、y軸角速度幅值一直小于1 (°)/s,保持在可接受范圍之內(nèi)。最終時(shí)刻目標(biāo)三軸末態(tài)角速度的幅值為0.460 1 (°)/s。此時(shí)消旋任務(wù)已完成,可以進(jìn)行后續(xù)抓捕任務(wù)。 圖6 特征模型消旋控制下的目標(biāo)轉(zhuǎn)速 圖7 特征模型控制下的控制量 圖8為接觸力矩曲線。對比圖7和圖8可以發(fā)現(xiàn),當(dāng)刷子與目標(biāo)接觸時(shí),接觸力矩作用于目標(biāo)上實(shí)現(xiàn)消旋;隨著目標(biāo)的旋轉(zhuǎn),刷子與目標(biāo)分離,此時(shí)接觸力矩保持為零。控制器在刷子與目標(biāo)即將發(fā)生接觸前根據(jù)當(dāng)前目標(biāo)角速度計(jì)算控制量,更新刷子深入量;當(dāng)刷子與目標(biāo)接觸時(shí)以及與目標(biāo)分離后,刷子深入量不發(fā)生改變。由于消旋力矩與最大慣量軸之間存在隨機(jī)夾角,x、y軸存在隨機(jī)的擾動力矩。擾動力矩激起了目標(biāo)x、y軸的角速度。在整個(gè)消旋過程中,隨著刷子深入量的不斷減小,接觸力矩的幅值不斷減小。 圖8 特征模型消旋控制下的接觸力矩 被控對象的特征參數(shù)辨識結(jié)果如圖9所示。根據(jù)式(18)、式(20)的參數(shù)范圍,結(jié)合仿真參數(shù),設(shè)定特征參數(shù)初值f1(0)=1,g0(0)=-0.5。在辨識過程中,1≤f1≤1.107, -0.5≤g0≤-0.492 3,當(dāng)t>400 s時(shí),特征參數(shù)收斂,f1→1.107,g0→-0.510 7。f1和g0相對各自的收斂值最多偏離了9.67%和3.6%。特征參數(shù)波動小,收斂速度快。 圖9 被控對象特征參數(shù)辨識結(jié)果(特征模型) 自校正PD控制器的設(shè)計(jì)思路[26]是以PD控制為控制器基本形式,在線辨識被控對象模型參數(shù),并將辨識結(jié)果按極點(diǎn)配置法進(jìn)行控制器參數(shù)設(shè)計(jì)。實(shí)驗(yàn)中將接觸式消旋對象建模為一階慣性模型,其表達(dá)式為 y(k+1)+a1y(k)=b0u(k) (26) 式中:a1和b0為對象模型參數(shù)。 在該控制律下,目標(biāo)角速度隨時(shí)間變化的曲線如圖10所示。當(dāng)t=555.6 s時(shí),z軸角速度降低到0.468 9 (°)/s,當(dāng)t=2 000 s時(shí),z軸角速度降低到0.403 8 (°)/s。在整個(gè)消旋過程中,x、y軸角速度幅值一直小于1 (°)/s,保持在可接受范圍之內(nèi)。最終時(shí)刻,目標(biāo)的三軸末態(tài)角速度幅值為0.659 5(°)/s。此時(shí)消旋任務(wù)已完成,可以進(jìn)行后續(xù)抓捕任務(wù)。 圖10 自校正PD控制下的目標(biāo)角速度 圖11為自校正PD控制下控制量隨時(shí)間變化的曲線圖。圖12為自校正PD控制下接觸力矩隨時(shí)間變化的曲線圖。 圖11 自校正PD控制下的控制量 圖12 自校正PD控制下的接觸力矩 圖13為被控對象模型參數(shù)辨識結(jié)果。設(shè)定參數(shù)初值a1(0)=-1,b0(0)=-0.05。在辨識過程中,-3.428≤a1≤-1, -8.514≤b0≤-0.05,當(dāng)t>500 s時(shí),參數(shù)收斂,a1→-1.251,b0→-0.977。a1和b0相對各自的收斂值最多偏離了173.98%和771.44%。相比于圖9的特征參數(shù)辨識過程,自校正PD控制中的參數(shù)辨識波動范圍更大。 圖13 被控對象特征模型參數(shù)辨識結(jié)果(自校正PD控制) 為了對比控制效果,給出自校正PD控制、黃金分割自適應(yīng)控制下最大慣量軸角速度隨時(shí)間變化的曲線,其結(jié)果如圖14所示。兩種控制方式下的性能指標(biāo)如表3所示。 結(jié)合圖14和表3可以看出,兩種控制方式的三軸末態(tài)角速度均小于1 (°)/s,實(shí)現(xiàn)了控制目標(biāo),黃金分割自適應(yīng)控制的末態(tài)角速度幅值更小,過渡過程時(shí)間和調(diào)整時(shí)間均優(yōu)于自校正PD控制方案。 表3 對比指標(biāo) 圖14 不同控制方式下最大慣量軸角速度對比圖 將仿真實(shí)驗(yàn)結(jié)論總結(jié)如下: 1) 基于特征模型的黃金分割自適應(yīng)控制方法能有效衰減目標(biāo)角速度。 2) 在參數(shù)辨識過程中,相比自校正PD控制,基于特征模型的黃金分割自適應(yīng)控制方法的特征參數(shù)波動范圍更小,辨識過程更加平穩(wěn)。 3) 相比自校正PD控制,基于特征模型的黃金分割自適應(yīng)控制方法的末態(tài)角速度減小了30.24%,調(diào)整時(shí)間縮短了37.74%,在快速性和穩(wěn)態(tài)誤差指標(biāo)上綜合性能更好。 針對接觸過程動力學(xué)過程難以精確建模的問題,提出了一種基于特征模型的自適應(yīng)控制方法。通過描述接觸碰撞后目標(biāo)角速度的特征模型,并基于該模型設(shè)計(jì)了黃金分割自適應(yīng)控制器,有效克服了接觸碰撞模型存在的不確定性。仿真結(jié)果表明與自校正PD控制方法相比,所提出的控制方法具有更好的動態(tài)和穩(wěn)態(tài)性能。
2.2 特征參數(shù)的范圍分析



2.3 控制器設(shè)計(jì)
3 仿真分析
3.1 基于特征模型的黃金分割自適應(yīng)控制實(shí)驗(yàn)

3.2 自校正PD控制實(shí)驗(yàn)
3.3 仿真結(jié)果對比分析

4 結(jié) 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
