飛機(jī)防滑剎車系統(tǒng)試驗(yàn)分析方法
2021-12-02 11:27:56張文星孟建文
科學(xué)技術(shù)與工程 2021年33期
屈 程,張文星,孟建文
(中國飛行試驗(yàn)研究院,西安 710089)
防滑剎車系統(tǒng)與飛行安全緊密相關(guān),隨著飛機(jī)大載荷和高速度的發(fā)展進(jìn)程,對(duì)防滑剎車系統(tǒng)的性能要求也愈加嚴(yán)苛,飛機(jī)防滑剎車系統(tǒng)復(fù)雜且具有較高的不確定性,一直以來,剎車系統(tǒng)控制策略[1-4]和系統(tǒng)性能分析[5-8]都是中外學(xué)者的重要研究方向。文獻(xiàn)[9]建立了基于反饋線性化思想的前饋防滑剎車控制律,假設(shè)左、右機(jī)輪對(duì)稱剎車且工作條件相同,建立了動(dòng)力學(xué)仿真模型,并就剎車減速過程中的摩擦狀態(tài)、滑移率仿真結(jié)果與期望結(jié)果進(jìn)行了比對(duì)。文獻(xiàn)[10]設(shè)計(jì)了基于雙側(cè)機(jī)輪剎車系統(tǒng)的防滑剎車控制律及基于前輪轉(zhuǎn)向和主輪差動(dòng)剎車的糾偏控制律,基于雙側(cè)機(jī)輪剎車系統(tǒng)構(gòu)建了動(dòng)力學(xué)仿真模型,并對(duì)非對(duì)稱載荷和偏航角擾動(dòng)剎車減速過程中的地面結(jié)合系數(shù)、滑移率、偏航角等結(jié)果進(jìn)行了分析。文獻(xiàn)[11]設(shè)計(jì)了一種基于數(shù)字信號(hào)處理器(digital signal processor,DSP)的防滑剎車控制器,采用地面慣性臺(tái)試驗(yàn)對(duì)剎車壓力、剎車力矩、驅(qū)動(dòng)控制電壓、機(jī)輪速度等試驗(yàn)結(jié)果參數(shù)進(jìn)行了分析。文獻(xiàn)[12]提出了一種基于近似動(dòng)態(tài)規(guī)劃的自適應(yīng)最優(yōu)控制方法,考慮了空氣動(dòng)力學(xué)特性影響,通過簡化制動(dòng)控制系統(tǒng)為單輪模型,建立了動(dòng)力學(xué)仿真模型,采用仿真分析和地面慣性試驗(yàn)臺(tái)試驗(yàn)兩種方式,對(duì)剎車系統(tǒng)性能進(jìn)行了對(duì)比分析。
整體而言,建模仿真相對(duì)靈活,但大多基于單輪模式,并且模型中采用的剎車盤力矩特性、地面結(jié)合系數(shù)大都基于理論或經(jīng)驗(yàn)公式,與真實(shí)情況難免存在差異;地面慣性臺(tái)試驗(yàn)更貼近真實(shí)情況,但無法模擬飛機(jī)雙側(cè)機(jī)輪同時(shí)剎車的真實(shí)狀態(tài),并且難以反映飛機(jī)剎車減速過程受到的氣動(dòng)力和發(fā)動(dòng)機(jī)殘余推力。飛行試驗(yàn)?zāi)軌蛑苯臃从撤阑瑒x車系統(tǒng)在飛機(jī)上的實(shí)際裝機(jī)使用效果,文獻(xiàn)[13]從飛機(jī)防滑剎車系統(tǒng)功能及主要性能出發(fā),研究了現(xiàn)役飛機(jī)防滑剎車系統(tǒng)的試驗(yàn)項(xiàng)目以及試驗(yàn)方法。文獻(xiàn)[14]以模糊目標(biāo)導(dǎo)向(goal-oriented,GO)法為基礎(chǔ),結(jié)合狀態(tài)枚舉法,分析了某型運(yùn)輸機(jī)防滯剎車系統(tǒng)可靠性。文獻(xiàn)[15]基于Y12飛機(jī)和MA60飛機(jī)飛行試驗(yàn),從剎車系統(tǒng)組成和原理出發(fā),研究了飛機(jī)防滑剎車系統(tǒng)最佳和最大剎車壓力確定方法。文獻(xiàn)[16]針對(duì)某型前三點(diǎn)式飛機(jī)連續(xù)低速滑行剎車偏航問題,基于理論力學(xué)分析方法,確定了導(dǎo)致該型飛機(jī)偏航的剎車力矩差閾值。文獻(xiàn)[17]根據(jù)飛機(jī)剎車系統(tǒng)的結(jié)構(gòu)、工作環(huán)境及其數(shù)據(jù)特點(diǎn),采用組合預(yù)測(cè)模型對(duì)某型飛機(jī)剎車系統(tǒng)性能進(jìn)行了趨勢(shì)預(yù)測(cè)研究。
目前,防滑剎車系統(tǒng)在工程應(yīng)用階段的試驗(yàn)研究較為常見,在工程研制階段的研究相對(duì)較少。針對(duì)工程研制階段,開展剎車系統(tǒng)試驗(yàn)分析研究,對(duì)于評(píng)估系統(tǒng)的實(shí)際使用性能,優(yōu)化試驗(yàn)設(shè)計(jì)、升級(jí)系統(tǒng)控制律,具有十分重要的意義。
現(xiàn)以某型飛機(jī)新研制防滑剎車系統(tǒng)飛行試驗(yàn)為例,首先建立“飛行員評(píng)述導(dǎo)向+流程化判讀+問題歸納+優(yōu)化建議”的試飛測(cè)試數(shù)據(jù)判讀流程,隨后針對(duì)該型飛機(jī)剎車減速過程機(jī)測(cè)輪速高于實(shí)際地速的問題,發(fā)展一種實(shí)際機(jī)輪速度求解方法,之后分析該型飛機(jī)剎車減速過程航向偏移的機(jī)理,通過對(duì)比不同架次滑移率與減速率的關(guān)系,首次在飛行試驗(yàn)中發(fā)現(xiàn)深打滑引發(fā)航向失穩(wěn)進(jìn)而導(dǎo)致減速率變化的現(xiàn)象,最后針對(duì)減速過程中的深打滑現(xiàn)象開展細(xì)致分析,并提出剎車控制系統(tǒng)優(yōu)化建議。
1 測(cè)試數(shù)據(jù)判讀流程
某型飛機(jī)防滑剎車系統(tǒng)開展外場(chǎng)試驗(yàn),執(zhí)行試驗(yàn)任務(wù)的飛行員擁有豐富的剎車系統(tǒng)使用經(jīng)驗(yàn),評(píng)述作為飛行員的主觀評(píng)價(jià),對(duì)于剎車系統(tǒng)的性能評(píng)價(jià)和技術(shù)升級(jí)具有很高的參考價(jià)值;測(cè)試數(shù)據(jù)相比飛行員評(píng)述更具客觀性,對(duì)于防滑剎車系統(tǒng)的實(shí)際功能、性能以及試驗(yàn)暴露出的問題,能夠提供定量的評(píng)價(jià)依據(jù)。
防滑剎車系統(tǒng)試飛在數(shù)據(jù)判讀時(shí)首次建立了“飛行員評(píng)述導(dǎo)向+流程化判讀+問題歸納+優(yōu)化建議”的測(cè)試數(shù)據(jù)判讀流程,具體如圖1所示。
2 測(cè)試數(shù)據(jù)判讀分析案例
2.1 測(cè)試數(shù)據(jù)判讀
2.1.1 飛行員評(píng)述導(dǎo)向判讀階段
在a飛行日完成第2架次(以下簡稱為a-2架次)滑行任務(wù)后,飛行員評(píng)述中反映以下問題:① 剎車到底,前1~2 s減速不明顯,后續(xù)減速正常;② 剎車減速過程航向變化明顯。
圖2給出了滑行剎車時(shí)間歷程圖,可以看到,剎車指令信號(hào)踩滿,前2 s內(nèi)飛機(jī)地速未有明顯下降(地速從33.2 m/s升至34.5 m/s隨后再降至33.1 m/s)。圖3給出了以地速開始降低為初始時(shí)刻的航向變化示意圖,可以看到,剎車減速過程航向變化明顯,地速14 m/s以上航向最大變化約4°,之后航向持續(xù)向左偏離約5.5°。觀察圖3初步可以發(fā)現(xiàn),飛機(jī)航向變化與左右側(cè)機(jī)輪打滑存在一定聯(lián)系。
2.1.2 流程化判讀階段
(1)剎車過程系統(tǒng)報(bào)故情況。經(jīng)檢查,剎車過程無系統(tǒng)報(bào)故。
(2)剎車過程航向偏離程度。剎車減速過程,航向最大偏離8°,航向一致性較差。
(3)剎車過程機(jī)輪打滑情況。表1所示為剎車過程深打滑情況統(tǒng)計(jì)表,結(jié)合圖3可以看到,滑行剎車過程打滑次數(shù)較多且分布在各個(gè)速度段,左側(cè)機(jī)輪在輪速降至防滑失效速度后發(fā)生抱死,并持續(xù)至完全剎停。
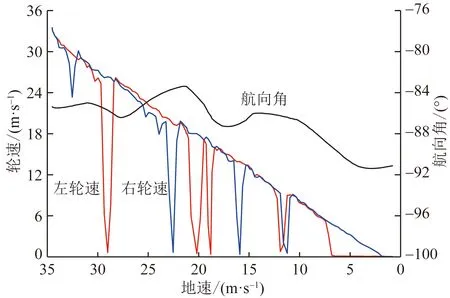
圖3 滑行剎車航向變化示意圖(a-2架次)Fig.3 Taxi brake course change curve(flight a-2)
(4)剎車過程減速率情況。表2所示為剎車過程剎車減速率情況統(tǒng)計(jì)表,經(jīng)計(jì)算,高壓轉(zhuǎn)子轉(zhuǎn)速n2降為慢車至防滑失效段減速率達(dá)到2.59 m/s2,為全段最高,未滿足該型飛機(jī)的減速率指標(biāo)要求。

表2 減速率情況統(tǒng)計(jì)表(a-2架次)Table 2 Statistics of deceleration rate(flight a-2)
2.2 分析問題及優(yōu)化建議
2.2.1 分析問題
針對(duì)飛行員評(píng)述中反映的第一項(xiàng)問題,分析原因主要如下。
(1)防滑剎車控制律中的升壓起點(diǎn)設(shè)置偏低。
(2)程序預(yù)設(shè)的壓力增長率偏低,1 s后壓力僅1.6 MPa,未能使飛行員產(chǎn)生明顯減速感。
(3)剎車指令信號(hào)踩滿時(shí)發(fā)動(dòng)機(jī)高壓轉(zhuǎn)子轉(zhuǎn)速n2仍然較高,此時(shí)發(fā)動(dòng)機(jī)推力較大,飛機(jī)仍具有一定的航向加速度,初始較低的剎車力矩不足以使飛行員產(chǎn)生明顯減速感覺。
針對(duì)判讀階段暴露的航向一致性較差和減速率不足問題,下面進(jìn)行具體分析。
飛機(jī)質(zhì)量一定時(shí),結(jié)合力的大小主要取決于輪胎與跑道的結(jié)合系數(shù),對(duì)于確定的跑道和輪胎類型,結(jié)合系數(shù)主要與滑移率S有關(guān)。在飛機(jī)剎車減速過程中,機(jī)輪速度小于飛機(jī)速度時(shí)將產(chǎn)生滑移,滑移率定義為
(1)
式(1)中:Vg為飛機(jī)滑跑地速;V為剎車機(jī)輪速度,V=ωsr,ωs為剎車機(jī)輪角速度,r為機(jī)輪滾動(dòng)半徑。
機(jī)輪純滾動(dòng)時(shí),滑移率為0;機(jī)輪抱死時(shí),滑移率為1。從圖4可以看到,縱向結(jié)合系數(shù)與滑移率關(guān)系曲線中存在一個(gè)極值點(diǎn),對(duì)應(yīng)最佳滑移率和最大結(jié)合系數(shù);側(cè)向結(jié)合系數(shù)隨著滑移率的增加而減小,到滑移率為1時(shí)甚至接近于0,這說明在機(jī)輪打滑較深時(shí),剎車機(jī)輪的航向會(huì)變得極不穩(wěn)定。當(dāng)滑移率在0.1~0.3范圍內(nèi),縱向和側(cè)向的結(jié)合系數(shù)都比較大,是安全高效制動(dòng)的理想工作區(qū)。

圖4 結(jié)合系數(shù)與滑移率關(guān)系曲線Fig.4 Relation curve between friction coefficient and slip rate
圖5給出了采用機(jī)測(cè)輪速和地速計(jì)算得到的滑行剎車過程滑移率隨地速變化曲線,平均滑移率取為左滑移率與右滑移率之和的平均值,從圖5可以看到,在非深打滑階段,滑移率基本處于[-0.1,0]區(qū)間,表明剎車減速過程機(jī)測(cè)輪速高于實(shí)際地速,不符合實(shí)際情況,分析原因主要是因?yàn)閯x車控制律中預(yù)置的機(jī)輪半徑大于實(shí)際機(jī)輪半徑,因此采用該方法計(jì)算得到的滑移率曲線對(duì)于最佳滑移率的控制策略分析不具有參考價(jià)值。
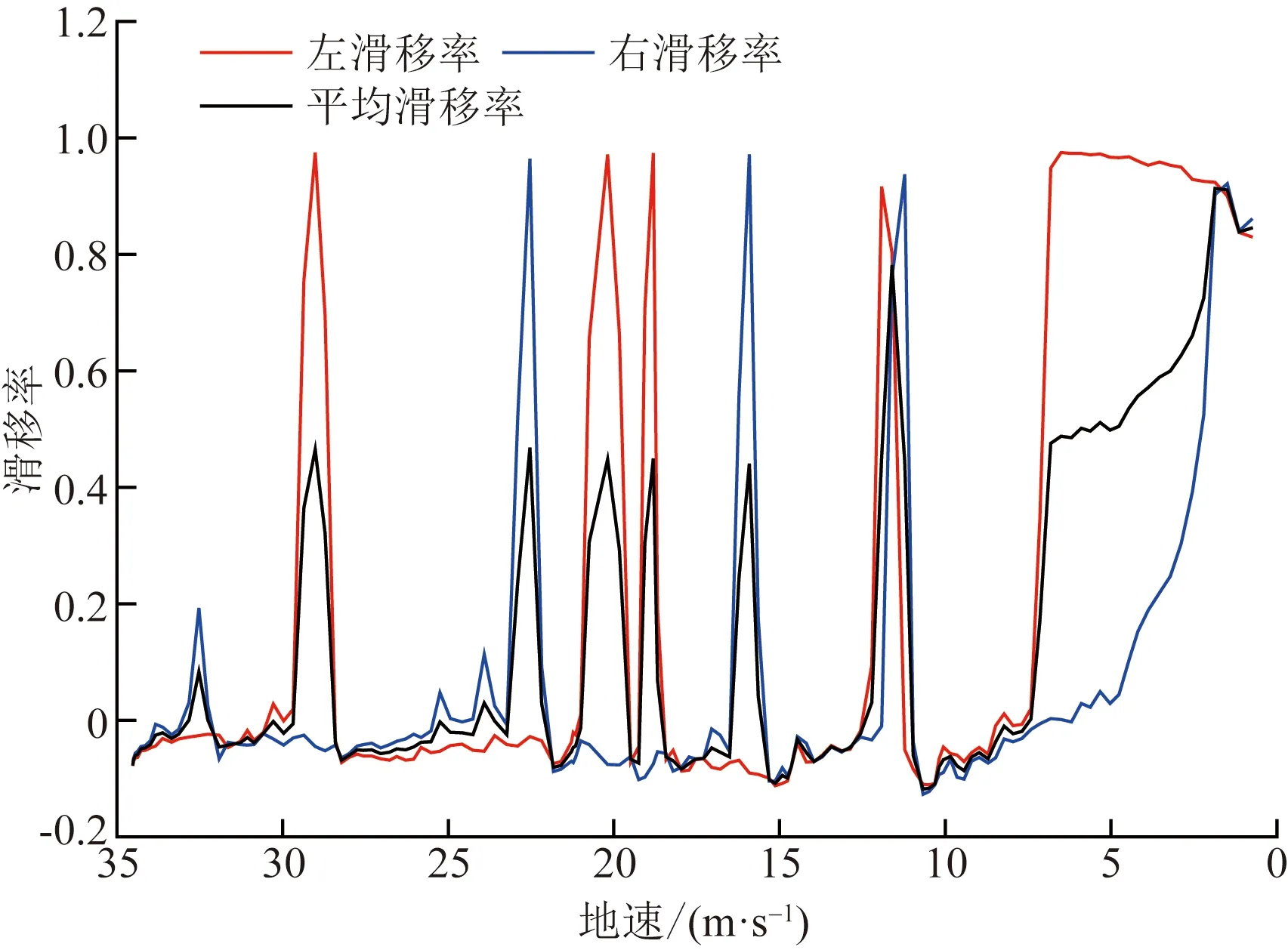
圖5 滑行剎車過程滑移率隨地速變化曲線(機(jī)測(cè)輪速)(a-2架次)Fig.5 Variation curve of slip rate and surface velocity during taxiing braking process(test wheel speed)(flight a-2)
2.2.2 推導(dǎo)公式
針對(duì)以上問題,發(fā)展了一種實(shí)際機(jī)輪速度求解方法,具體思路如下。
(1)飛機(jī)滑跑加速過程機(jī)輪處于自由滾動(dòng)狀態(tài),此時(shí)有
Vg=ωhrsj
(2)
式(2)中:ωh為滑跑加速過程機(jī)輪角速度;rsj為實(shí)際機(jī)輪半徑。
(2)根據(jù)滑跑加速過程機(jī)測(cè)輪速Vh和預(yù)置機(jī)輪滾動(dòng)半徑r可以得到
ωh=Vh/r
(3)
(3)根據(jù)式(2)和式(3)可以得到
(4)
圖6給出了采用以上方法計(jì)算得到的滑行實(shí)際機(jī)輪半徑與地速關(guān)系曲線,從圖6可以看到,以防滑失效速度為界,右側(cè)機(jī)輪半徑隨地速的減小緩慢降低,這主要是因?yàn)殡S著飛機(jī)升力減小,輪胎受到的地面支持力逐漸增大,輪胎壓縮量逐漸增加,機(jī)輪半徑逐漸減小,該區(qū)間的機(jī)輪半徑變化規(guī)律符合物理實(shí)際,因此判定為半徑可用區(qū)間;在防滑失效速度左側(cè),機(jī)輪半徑與地速出現(xiàn)了非物理性的變化規(guī)律,分析原因主要是因?yàn)闄C(jī)輪角速度傳感器在防滑失效速度以下的測(cè)量精度不足,導(dǎo)致由此解算得到的機(jī)輪半徑不符合物理實(shí)際,因此判定為半徑不可用區(qū)間,由于該區(qū)間升力較低且變化相對(duì)較小,因此本文的處理方法是將防滑失效速度點(diǎn)的機(jī)輪半徑作為該區(qū)間的實(shí)際機(jī)輪半徑。
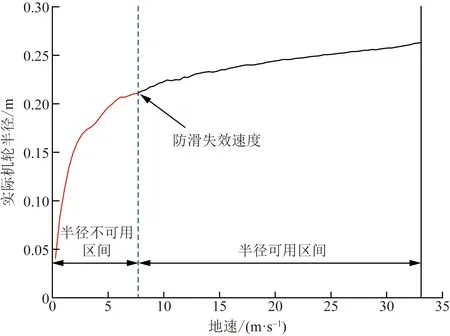
圖6 滑行實(shí)際機(jī)輪半徑與地速關(guān)系曲線(a-2架次)Fig.6 Variation curve of actual wheel radius and ground speed during taxiing process(flight a-2)
由此可以得到剎車減速過程的實(shí)際機(jī)輪速度Vsj,公式為
(5)
圖7給出了滑行剎車過程航向角與滑移率關(guān)系曲線,其中滑移率采用Vsj和Vg計(jì)算得到,可以看到,在非深打滑階段,滑移率基本處于[0.1,0.3]區(qū)間,這表明采用的實(shí)際機(jī)輪速度求解方法能夠較好反映剎車減速過程機(jī)輪的實(shí)際滑移情況。
觀察圖7還可以看到,剎車減速過程航向偏移與機(jī)輪滑移率存在直接聯(lián)系,當(dāng)左機(jī)輪滑移率比右機(jī)輪高時(shí),航向有左偏的趨勢(shì),反之則有右偏的趨勢(shì),這主要是受側(cè)向結(jié)合系數(shù)的影響,圖8給出了某型飛機(jī)的示意圖,對(duì)飛機(jī)進(jìn)行受力分析可以看到,忽略機(jī)翼升力,地面對(duì)飛機(jī)的支持力與飛機(jī)自身重力G平衡,由于起落架呈外八字支撐,左、右機(jī)輪還受到沿地面方向的側(cè)向力Fx1和Fx2,當(dāng)飛機(jī)兩側(cè)機(jī)輪滑移率相同時(shí),側(cè)向結(jié)合系數(shù)一致,F(xiàn)x1和Fx2大小相等,方向相反,飛機(jī)航向能夠保持穩(wěn)定;反之,飛機(jī)航向會(huì)偏向滑移率較高的機(jī)輪一側(cè)。
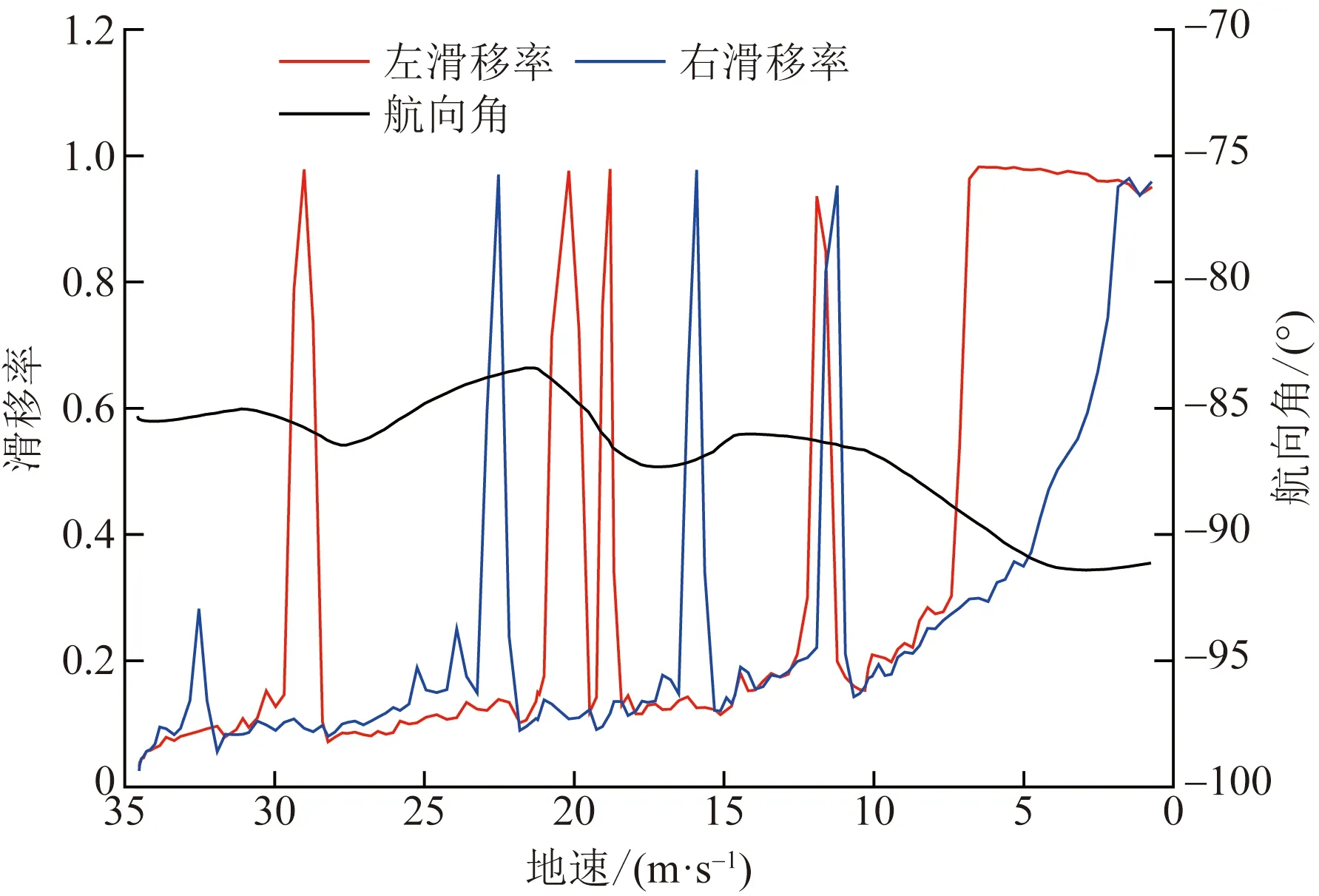
圖7 滑行航向角與滑移率關(guān)系曲線(a-2架次)Fig.7 Variation curve of heading angle and slip rate during taxiing process(flight a-2)
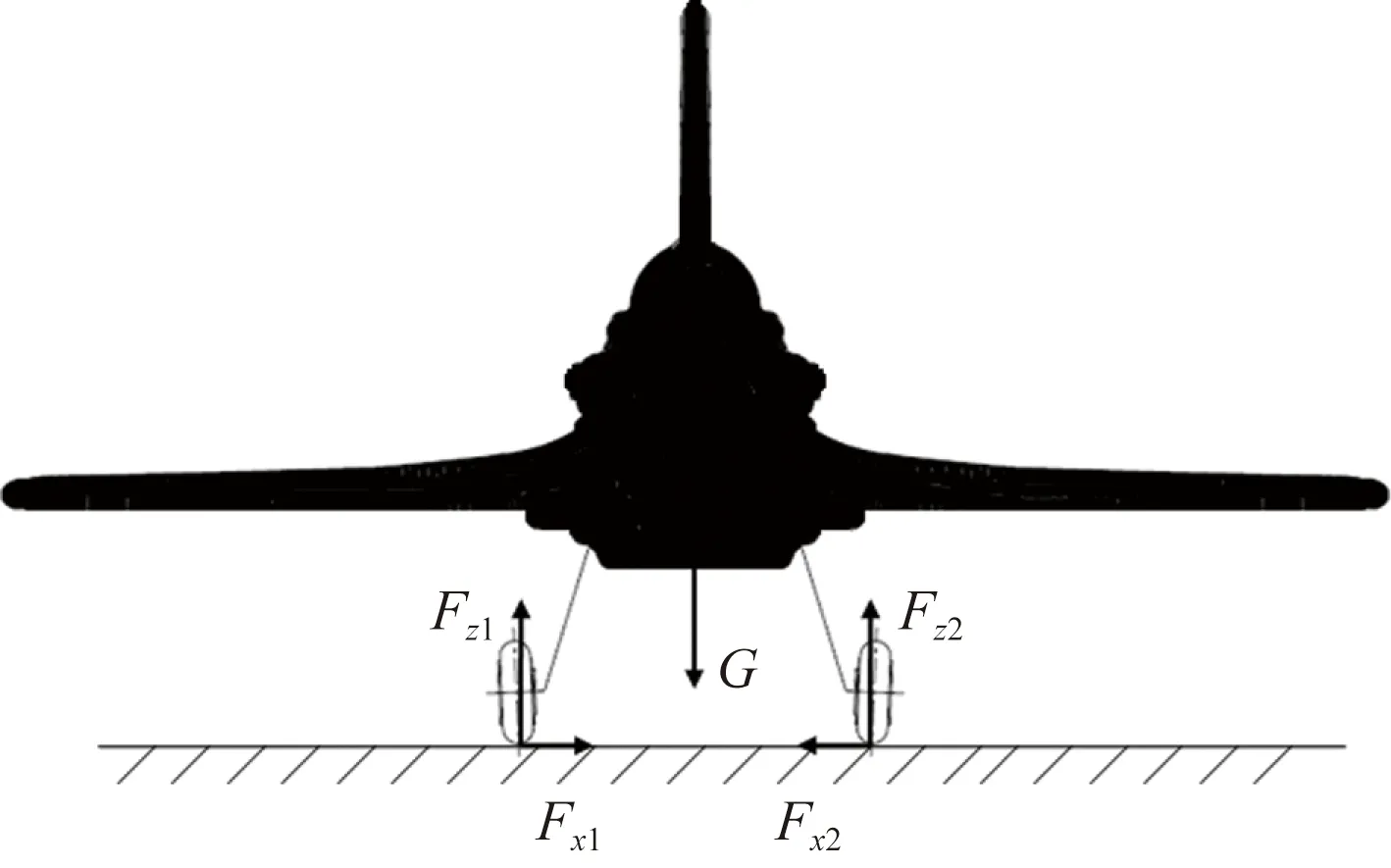
圖8 飛機(jī)示意圖Fig.8 Aircraft diagram
圖9給出了滑行過程減速率與平均滑移率關(guān)系曲線,從圖9可以看到,深打滑導(dǎo)致平均滑移率快速升高,使得結(jié)合系數(shù)降低,從而對(duì)減速率產(chǎn)生了不利影響,并且,頻繁深打滑導(dǎo)致飛機(jī)減速率出現(xiàn)較大幅度波動(dòng),這會(huì)使飛行員在剎車減速過程中產(chǎn)生較為明顯的減速頓挫感,影響剎車體驗(yàn)。
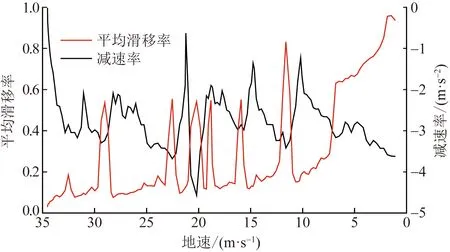
圖9 滑行減速率與平均滑移率關(guān)系曲線(a-2架次)Fig.9 Variation curve of deceleration rate and average slip rate during taxiing process(flight a-2)
為了進(jìn)一步研究深打滑對(duì)減速率的影響,進(jìn)一步對(duì)比了不同飛行日平均滑移率與減速率的關(guān)系。圖10給出了不同試驗(yàn)架次的減速率與平均滑移率及航向角關(guān)系曲線,其中紅色曲線為b飛行日第3架次,以下簡稱b-3架次;黑色曲線為c飛行日第1架次,以下簡稱c-1架次。
第1階段。兩架次平均滑移率大致相當(dāng),對(duì)應(yīng)的減速率基本一致。
第2階段。b-3架次發(fā)生一次單側(cè)深打滑,c-1架次未出現(xiàn)打滑,雖然打滑之后兩架次的平均滑移率基本保持一致,但是b-3架次的減速率明顯低于c-1架次,分析原因主要是因?yàn)閎-3架次發(fā)生單側(cè)打滑之后出現(xiàn)航向失穩(wěn),導(dǎo)致剎車減速過程滑移角顯著增加,在縱向和側(cè)向結(jié)合系數(shù)的耦合作用下,地面提供的實(shí)際摩擦力低于航向穩(wěn)定狀態(tài),圖11給出了d-1架次和e-2架次減速率與平均滑移率及航向角關(guān)系曲線,現(xiàn)象與圖10第2階段保持一致,這是首次在飛行試驗(yàn)中發(fā)現(xiàn)的航向失穩(wěn)引起減速率變化的現(xiàn)象,該現(xiàn)象的發(fā)現(xiàn)對(duì)于引入滑移率控制的防滑剎車控制律設(shè)計(jì)具有十分重要的參考價(jià)值。

圖10 減速率與平均滑移率及航向角關(guān)系曲線(b-3架次,c-1架次)Fig.10 Variation curve of deceleration rate and average slip rate and heading angle (flight b-3,flight c-1)
第3階段。b-3架次和c-1架次都出現(xiàn)了一次雙側(cè)同步深打滑,均引發(fā)了減速率大幅降低。
第4階段。兩架次平均滑移率大致相當(dāng),對(duì)應(yīng)的減速率也基本一致,這主要是因?yàn)榈?階段的雙側(cè)同步深打滑未導(dǎo)致航向失穩(wěn),因此平均滑移率與減速率的關(guān)系與第1階段基本相同。
通過以上分析可以看到,深打滑不僅會(huì)破壞剎車過程的航向一致性,同時(shí)也會(huì)對(duì)減速率產(chǎn)生不利影響,因此剎車過程應(yīng)該盡量避免深打滑特別是單側(cè)深打滑現(xiàn)象的發(fā)生。
2.2.3 優(yōu)化建議
具體分析深打滑的產(chǎn)生原因,目的是提出優(yōu)化建議,為剎車控制律升級(jí)提供依據(jù)。
圖12給出了a-2架次滑行右輪第3次深打滑時(shí)間歷程曲線,從圖12可以看到,在t1時(shí)刻右輪速出現(xiàn)降低,系統(tǒng)檢測(cè)到右側(cè)機(jī)輪出現(xiàn)打滑現(xiàn)象,t1—t2時(shí)刻右閥電壓和右剎車壓力同步下降,但是由于剎車壓力下降較慢(僅降低了約0.5 MPa),因此右側(cè)機(jī)輪打滑進(jìn)一步加劇并進(jìn)入深打滑(右輪速基本降低至0),t2—t3時(shí)刻系統(tǒng)檢測(cè)到打滑加劇,到t3時(shí)刻剎車壓力進(jìn)一步降低了約1 MPa,右輪速開始增加,右側(cè)機(jī)輪改出深打滑狀態(tài)。通過對(duì)本次深打滑時(shí)間歷程的分析可以看到,深打滑產(chǎn)生的原因主要是因?yàn)榉阑瑒x車系統(tǒng)對(duì)機(jī)輪的淺打滑不敏感,系統(tǒng)監(jiān)測(cè)到淺打滑現(xiàn)象時(shí)泄壓過慢,當(dāng)機(jī)輪由淺打滑進(jìn)入深打滑時(shí)才快速泄壓。因此,剎車系統(tǒng)防滑工作的時(shí)候往往伴隨著深打滑。
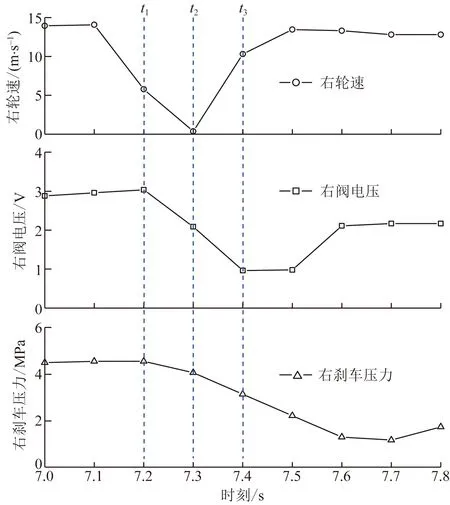
圖12 滑行右輪第3次深打滑時(shí)間歷程曲線(a-2架次)Fig.12 Course curve of right wheel third deep skid during taxiing process(flight a-2)
通過本次試驗(yàn)分析,共提出以下4點(diǎn)優(yōu)化建議:
(1)飛行員在剎車時(shí)注意觀察發(fā)動(dòng)機(jī)高壓轉(zhuǎn)子轉(zhuǎn)速n2,待n2降至慢車轉(zhuǎn)速時(shí)再踩剎車。
(2)建議提高防滑剎車控制律中的升壓起點(diǎn),并且提高壓力增長率。
(3)建議對(duì)防滑控制算法中的防滑參數(shù)進(jìn)行調(diào)整,提高剎車系統(tǒng)對(duì)“淺打滑”的靈敏度,保證飛機(jī)在剎車過程中,只要機(jī)輪出現(xiàn)淺打滑就能以較快的速度釋放剎車壓力,避免機(jī)輪進(jìn)一步進(jìn)入深打滑。
(4)建議飛機(jī)機(jī)輪任意一側(cè)出現(xiàn)深打滑時(shí),另一側(cè)也進(jìn)行同步泄壓操作,之后兩側(cè)壓力一起恢復(fù),確保飛機(jī)同一時(shí)刻,左右機(jī)輪不會(huì)持續(xù)出現(xiàn)較大壓力差,避免因單側(cè)機(jī)輪深打滑導(dǎo)致飛機(jī)航向失穩(wěn),進(jìn)而影響減速效率。
設(shè)計(jì)方針對(duì)第3條優(yōu)化建議,對(duì)防滑剎車控制律軟件進(jìn)行了升級(jí),圖13給出了f-2架次(軟件升級(jí)后)左輪打滑時(shí)間歷程曲線,從圖13可以看到,在t1時(shí)刻左輪速出現(xiàn)降低,系統(tǒng)檢測(cè)到左側(cè)機(jī)輪出現(xiàn)打滑現(xiàn)象,t1—t2時(shí)刻左閥電壓和左剎車壓力同步快速下降(0.1 s泄壓約2.5 MPa),t2時(shí)刻左輪速開始增加,左側(cè)機(jī)輪改出淺打滑,未進(jìn)入深打滑狀態(tài)。這表明a-2架次測(cè)試數(shù)據(jù)判讀正確,提出的優(yōu)化建議能夠有效避免機(jī)輪進(jìn)入深打滑狀態(tài)。

圖13 左輪打滑時(shí)間歷程曲線(f-2架次)Fig.13 Course curve of left wheel skid(flight a-2)
3 結(jié)論
針對(duì)某型飛機(jī)新研防滑剎車控制系統(tǒng)飛行試驗(yàn),建立了“飛行員評(píng)述導(dǎo)向+流程化判讀+問題歸納+優(yōu)化建議”的測(cè)試數(shù)據(jù)判讀流程,發(fā)展了一種試驗(yàn)分析方法,主要結(jié)論如下。
(1)發(fā)展的機(jī)輪半徑求解方法克服了剎車控制律中預(yù)置固定機(jī)輪半徑方法的不足,可用于實(shí)際機(jī)輪速度計(jì)算,得到的滑移率可為飛機(jī)防滑剎車系統(tǒng)性能分析提供有效支撐。
(2)通過對(duì)比不同架次滑移率與減速率及航向角的關(guān)系曲線,首次在飛行試驗(yàn)中發(fā)現(xiàn)了深打滑引發(fā)航向失穩(wěn)進(jìn)而導(dǎo)致減速率變化的現(xiàn)象,該現(xiàn)象的發(fā)現(xiàn)對(duì)于引入滑移率控制的防滑剎車控制律設(shè)計(jì)具有十分重要的參考價(jià)值。
(3)提出的剎車控制系統(tǒng)優(yōu)化建議能夠有效避免剎車減速過程機(jī)輪進(jìn)入深打滑狀態(tài),進(jìn)而降低深打滑對(duì)減速率的不利影響。
(4)發(fā)展的防滑剎車系統(tǒng)試驗(yàn)分析方法合理可行,能夠發(fā)現(xiàn)試驗(yàn)設(shè)計(jì)和防滑剎車控制律設(shè)計(jì)中的缺陷和不足,有利于試驗(yàn)設(shè)計(jì)和防滑剎車控制律優(yōu)化升級(jí)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45

- 科學(xué)技術(shù)與工程的其它文章
- 貴州黔北地區(qū)構(gòu)造煤與原生結(jié)構(gòu)煤孔隙特征及分形
- 生物炭農(nóng)田利用領(lǐng)域的研究熱點(diǎn)與趨勢(shì):基于文獻(xiàn)計(jì)量學(xué)的可視化分析
- 雷諾數(shù)和湍流度對(duì)葉片表面邊界層轉(zhuǎn)捩和換熱特性的影響
- 車轍歷程中的集料細(xì)觀運(yùn)動(dòng)追蹤方法及其應(yīng)用
- 城市水循環(huán)健康的評(píng)價(jià)方法及其應(yīng)用
——以邯鄲市主城區(qū)為例 - 基于深度殘差反向傳播神經(jīng)網(wǎng)絡(luò)的鋼筋腐蝕檢測(cè)