肌骨超聲輔助定位在經皮椎間孔鏡穿刺技術中的臨床價值
2021-12-03 07:48:46胡芳銘雷麗香邱潔楊昌宇林盛財
骨科 2021年6期
胡芳銘 雷麗香 邱潔 楊昌宇 林盛財
經皮椎間孔內窺鏡技術已廣泛應用于胸、腰段 的椎間盤突出癥、椎管狹窄癥、黃韌帶骨化等常見臨床疾病,具有微創、術后恢復快、相對經濟等優點,臨床效果顯著[1]。目前椎間孔鏡手術穿刺過程仍以“C”型臂X 線機引導為主,但存在缺乏視覺直觀感受、學習過程漫長、多次放射傷害、病人體位變化而發生誤差等缺點[2]。當前肌骨超聲引導下的與椎間孔穿刺相關的介入技術逐漸成熟,并且取得了良好的臨床效果[3?6]。我院超聲科于2018年6月至2020年12 月聯合我院骨科開展肌骨超聲輔助定位引導經皮椎間孔鏡穿刺技術,通過觀察這種全新的椎間孔穿刺導航技術的應用效果,以期提高椎間孔鏡手術穿刺的精確性與安全性,減少病人放射傷害。
資料與方法
一、納入標準及排除標準
納入標準:①病史>3個月;②疼痛視覺模擬量表(visual analogue scale,VAS)評分≥6 分;③經規范保守治療4周以上,效果不佳;④擬行經皮椎間孔鏡穿刺技術治療。
排除標準:①伴有腰椎不穩;②伴有椎管狹窄癥;③精神紊亂不能配合手術者。
二、一般資料
48 例單節段(L3/4或L4/5)椎間盤突出癥、需采取經皮椎間孔鏡側路法(標準TESSYS技術)手術的病人納入研究。
48例病人采用隨機數字表法隨機分為兩組,每組24例。C臂透視組通過“C”型臂X線機透視引導椎間孔穿刺;超聲輔助組在“C”型臂X 線機的透視引導基礎下輔以肌骨超聲進行椎間孔穿刺。兩組性別、年齡、椎間盤突出節段及類型、術前日本骨科協會(Japanese Orthopaedic Association Scores,JOA)腰椎評分、VAS 評分比較,差異均無統計學意義(P均>0.05,表1)。

表1 兩組病人術前一般資料比較
三、手術方法
術前結合病人臨床癥狀、體格檢查、影像學資料確定責任節段,根據脊柱形狀特點、髂嵴高度、椎間盤突出位置、病人體型特點進行穿刺角度、距離測量,設計穿剌路徑。
C 臂透視組病人取俯臥位,常規標記兩側棘突中軸線及兩側髂嵴,“C”型臂X線機透視確定責任椎、穿刺點、靶點、穿刺路徑,進行體表劃線(圖1 a、b)。一般側位片椎弓根后緣為穿刺安全線,L3/4節段的進針點位于棘突旁10~12 cm,L4/5的進針點位于棘突旁12~14 cm。穿刺路徑為進針點與靶點連線,與椎間隙水平線成15°~25°,與冠狀面成30°~40°。穿刺靶點于正位透視下針尖位于椎弓根中心點連線,側位透視下針尖位于相鄰椎體椎間盤后緣中點處(圖1 c、d);對于需行椎間孔擴大成形者,穿刺靶點選擇偏向背側或上關節突尖部。術者根據穿刺大致方向進行利多卡因局部麻醉后,沿穿刺路徑進行反復穿刺,直至穿刺針達到理想位置。逐級擴大工作管道,環鋸椎間孔成形。置入椎間孔鏡,直視下摘除突出、游離的椎間盤髓核,沿神經根走行探查神經根,確定神經根無壓迫,雙極射頻止血,對破裂纖維環成形,退出通道,縫合切口。
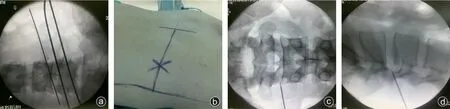
圖1 C臂透視組穿刺過程 a:X線下克氏針對穿刺節段、穿刺方向進行定位;b:標記穿刺點、穿刺途徑、穿刺靶點、安全線;c:穿刺成功后穿刺針X線圖像位置(正位片);d:穿刺成功后穿刺針X線圖像位置(側位片)
術后24 h,病人可佩戴腰圍適當行走,逐步鍛煉腰背肌功能,3個月內避免彎腰及重體力活動。
B 超輔助組仍根據“C”型臂X 線機透視確定穿刺途徑及安全線,穿刺過程及鏡下操作仍由骨科醫生完成,超聲圖像識別及穿刺超聲引導由5 年以上具有肌骨超聲經驗的超聲科醫生完成。采用HITA?CHI AVIUS 彩色多普勒超聲診斷儀,凸陣探頭,頻率:3~5 MHz。病人取俯臥位,首先選擇縱切面,將探頭平行于脊柱縱軸,根據腰椎與骶骨聲像圖確定第5腰椎(圖2 a),依次向上平移顯示責任節段下位椎體棘突,旋轉探頭90°,緩慢向上平移探頭,顯示患側關節突關節橫切面,表現為兩線狀強回聲,呈平行排列,在縱切面上表現為呈連續波浪狀的高回聲線。骨科醫生在超聲引導下穿刺針對準小關節最外側緣沿探頭短軸方向進行穿刺,當針尖到達小關節最外側緣骨面后,略調整方向穿刺針尖至上關節突腹側,隨后滑入椎間孔(圖2 b、c)。穿刺過程中探頭表面戴無菌手套。最終仍根據“C”型臂X線機透視確定穿刺針是否到達理想位置。

圖2 超聲輔助組穿刺過程 a:超聲確定第5腰椎及骶骨(SC);b:白色△所示為上關節突關節,facet關節突關節,橫突(TP);c:白色箭頭所示穿刺針靶點位置,即上關節突腹側
后期治療同C臂透視組。
四、觀察指標
記錄兩組術中總穿刺次數、透視次數、穿刺時間、穿刺并發癥,記錄各組病人術前及術后24 h 的VAS評分、JOA評分。
五、統計學分析
數據采用SPSS 19.0 統計學軟件(IBM 公司,美國)進行分析。計量資料以均數±標準差()表示,兩組間總穿刺次數、穿刺時間、透視次數、VAS 評分等指標的比較采取獨立樣本t檢驗,兩組的計數資料采取卡方檢驗進行分析比較。P<0.05 被視為差異有統計學意義。
結 果
兩組病人全部順利完成手術,均未出現穿刺并發癥。超聲輔助組術中總穿刺次數、透視次數、穿刺時間均顯著少于C 臂透視組,差異均具有統計學意義(P均<0.05)。超聲輔助組術后24 h 的VAS 評分低于C臂透視組,JOA評分高于C臂透視組,但組間比較,差異均無統計學意義(P均>0.05),見表2。
表2 兩組病人術中、術后觀察指標比較(±s)

表2 兩組病人術中、術后觀察指標比較(±s)
組別C臂透視組B超輔助組t值P值例數24 24--總穿刺次數(次)15.3±2.1 10.2±1.8 3.271 0.022穿刺時間(min)32.5±3.7 25.1±2.4 9.320 0.019透視次數(次)26.3±1.7 18.2±2.3 11.32 0.031術后24h VAS評分(分)2.45±0.51 2.27±0.43 2.130 0.172術后24h JOA評分(分)25.23±2.71 26.15±2.31 0.822 0.203
討 論
一、超聲引導椎間孔穿刺技術應用的發展
椎間孔鏡手術主要包括穿刺、置管、鏡下三項技術,其中椎間孔穿刺技術是經皮椎間孔鏡技術的第一步,也是較為關鍵的步驟。良好的穿刺技術不僅減少對臟器的損傷概率,縮短穿刺時間,降低后續手術難度,而且還能增加手術醫生對后續操作的信心[7]。目前椎間孔鏡手術穿刺除常規“C”型臂X 線機引導外還包括CT 導航、電磁導航,因存在不易攜帶、價格昂貴、操作復雜等問題而影響其臨床推廣使用[8]。近年來,隨著肌骨超聲技術的發展,椎間孔、棘突、上下關節突甚至神經根等重要脊柱結構已經可以清晰成像。任偉靖等[9]通過超聲引導下對巴馬小豬新鮮冷藏脊柱標本進行椎間孔穿刺發現該方法安全性高,雖然巴馬小豬椎間孔小,但準確率達到95%,其關鍵步驟是穿刺針在超聲引導下找到小關節最外側緣。李壽鵬等[10]發現一種全新的椎間孔穿刺方法,采用超聲引導穿刺針到達椎間孔外類圓形高回聲區軟組織后,從高回聲區外側12點至3點(左側)或12 點至9 點(右側),穿刺針尖可到達小關節突。這些均為肌骨超聲應用于引導椎間孔穿刺提供了臨床基礎。Wu等[11]以超聲引導穿刺針到達小關節側邊法完成椎間孔穿刺取得良好臨床效果,而張明博等[12]首次在單純超聲引導下完成經皮椎間孔鏡椎間盤切除術。
二、肌骨超聲引導椎間孔鏡穿刺技術的優勢
傳統的“C”型臂X 線機引導的椎間孔穿刺技術缺乏實時性,雖然術前根據“C”臂透視已畫出穿刺路徑,但穿刺的角度及深度仍依賴手術醫生的臨床經驗及感覺,并且只能在穿刺結束后根據透視判斷穿刺針尖位置。因此無論是水平面或冠狀位初始穿刺角度的輕度誤差,都可能導致穿刺針尖在到達靶點附近時出現較大偏移,導致穿刺失敗[13]。而超聲引導穿刺過程中可實時發現穿刺針尖與靶點之間關系,及時調整穿刺方向或終止該次穿刺,從而提高穿刺準確性,縮短穿刺時間,減少放射輻射[14?17]。本研究中超聲輔助組的總穿刺次數、透視次數、穿刺時間明顯少于C 臂透視組,根本原因就是肌骨超聲的實時性優勢。研究還發現,相對于C臂透視組,肌骨超聲組穿刺針、環鋸到達上關節突靶點的位置更加理想,使下一步驟上關節突成形更加充分,后期鏡下操作更加容易。
相對于透視,超聲對于避免神經、大血管、內臟的損傷更具有優勢。本研究中雖然兩組均未出現血管、神經、內臟損傷,但我們發現在穿刺過程中通過超聲對穿刺針進行動態監測,醫生更能直觀避免穿刺針進入腹腔損傷臟器,減少對內臟損傷的心理負擔。術后24 h的VAS評分、JOA評分比較,雖然超聲輔助組優于C臂導航組,但差異并無統計學意義,說明鏡下操作仍為椎間孔鏡最為關鍵的一步,熟練的椎間孔鏡下操作能夠在一定程度上彌補穿刺靶點位置的不足。
綜上所述,肌骨超聲輔助經皮椎間孔鏡穿刺技術是一種安全、方便、精確的導航方法,值得臨床廣泛推廣。