多參考地基增強(qiáng)系統(tǒng)電離層梯度完好性監(jiān)測(cè)方法
2021-12-06 03:13:40程建華李家祥
中國慣性技術(shù)學(xué)報(bào) 2021年4期
關(guān)鍵詞:檢測(cè)
程建華,李家祥,李 亮,姜 超,齊 兵
(哈爾濱工程大學(xué) 智能科學(xué)與工程學(xué)院,哈爾濱 150001)
地基增強(qiáng)系統(tǒng)(Ground-based Augmentation system, GBAS)是用于取代傳統(tǒng)儀表著陸系統(tǒng)的新一代民用航空導(dǎo)航系統(tǒng)[1]。GBAS主要由參考接收機(jī)子系統(tǒng)、地面處理子系統(tǒng)和數(shù)據(jù)廣播子系統(tǒng)構(gòu)成,其中,參考接收機(jī)子系統(tǒng)負(fù)責(zé)接收全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite System, GNSS)原始數(shù)據(jù)并交由地面處理子系統(tǒng)生成差分修正信息,最終由數(shù)據(jù)廣播子系統(tǒng)向作用范圍內(nèi)的航空用戶播發(fā)差分校正和完好性信息,為飛機(jī)提供精密進(jìn)場(chǎng)和著陸服務(wù)[2]。作為生命安全相關(guān)應(yīng)用,GBAS提供的導(dǎo)航服務(wù)完好性和可用性至關(guān)重要。在影響GBAS完好性的眾多風(fēng)險(xiǎn)源中,電離層梯度異常是精密進(jìn)近和著陸階段所需監(jiān)測(cè)的重要風(fēng)險(xiǎn)源[3,4]。
電離層的變化與太陽活動(dòng)強(qiáng)度、磁緯度、當(dāng)?shù)貢r(shí)間等因素密切相關(guān),難以使用模型消除其對(duì)高精度定位造成的影響[5-7]。電離層活動(dòng)正常情況下,得益于GBAS主控站與航空用戶間距離較短(通常為10 km以內(nèi)),經(jīng)站間-星間差分修正后,典型電離層梯度時(shí)空變化在L波段對(duì)航空用戶造成的導(dǎo)航定位誤差通常小于10 cm,不會(huì)影響CAT III精密進(jìn)近和著陸服務(wù)的完好性和可用性。然而,在電離層風(fēng)暴期間,電子濃度的異常波動(dòng)會(huì)產(chǎn)生異常空間去相關(guān)梯度,從而對(duì)GBAS提供的精密進(jìn)近和著陸服務(wù)造成嚴(yán)重危害[8]。航空無線電技術(shù)委員會(huì)在最近頒布的DO-253D文件中制定了詳細(xì)的GBAS機(jī)載最低運(yùn)行性能標(biāo)準(zhǔn),規(guī)定在CAT III精密進(jìn)近中,電離層梯度異常監(jiān)測(cè)的完好性風(fēng)險(xiǎn)指標(biāo)為10-9,可容忍的最大電離層梯度值為300 mm/km[9]。然而,2003年美國曾在機(jī)場(chǎng)跑道方向上觀測(cè)到高達(dá)412 mm/km的電離層梯度異常,此時(shí)若衛(wèi)星幾何分布較差,將在垂直方向上產(chǎn)生高達(dá)10 m的定位誤差[10]。此外,大量研究表明,電離層梯度異常的先驗(yàn)概率約為10-3,遠(yuǎn)高于精密進(jìn)近階段所能容忍的完好性風(fēng)險(xiǎn)指標(biāo)[5]。因此,實(shí)時(shí)監(jiān)測(cè)電離層梯度異常,隔離并排除受電離層梯度異常影響的衛(wèi)星,對(duì)提高GBAS服務(wù)完好性和可用性具有重要意義。
現(xiàn)階段用于GBAS的電離層梯度異常監(jiān)測(cè)方法主要可分為三類:
第一類是基于觀測(cè)量冗余和一致性檢驗(yàn)原理實(shí)現(xiàn)電離層梯度異常監(jiān)測(cè)的接收機(jī)自主完好性監(jiān)測(cè)技術(shù)( Receiver Autonomous Integrity Monitoring,RAIM)[11]。然而,RAIM受限于偽距觀測(cè)量精度,無法有效監(jiān)測(cè)小尺度電離層梯度異常,難以滿足CAT III精密進(jìn)近完好性和可用性需求。
為進(jìn)一步提升對(duì)小尺度電離層梯度異常的監(jiān)測(cè)靈敏度,可同時(shí)應(yīng)用于機(jī)載端和地面端的第二類方法被提出,即偽碼-載波偏離監(jiān)測(cè)(Code-Carrier Divergence,CCD)[12]。這類監(jiān)測(cè)方法利用一階線性時(shí)不變低通濾波器抑制偽距噪聲和多徑誤差對(duì)監(jiān)測(cè)算法的影響,基于電離層的時(shí)間梯度效應(yīng)開展監(jiān)測(cè),可有效降低電離層梯度在精密進(jìn)近階段引發(fā)的完好性風(fēng)險(xiǎn)。然而,CCD方法受限于電離層延遲變化率,無法對(duì)相對(duì)接收機(jī)上方靜止或坡度變化緩慢的異常梯度實(shí)現(xiàn)有效監(jiān)測(cè),顯然,這類電離層梯度同樣會(huì)對(duì)GBAS導(dǎo)航定位服務(wù)造成潛在危害。
為實(shí)現(xiàn)全類型電離層梯度異常監(jiān)測(cè),保障CAT III進(jìn)近完好性,以地面端多參考接收機(jī)布設(shè)為基礎(chǔ),基于載波相位差分處理的第三類電離層梯度異常監(jiān)測(cè)方法被提出[11]。基于此,Khanafseh等人提出在單歷元整周模糊度解算無偏前提下實(shí)時(shí)構(gòu)建檢測(cè)統(tǒng)計(jì)量,實(shí)現(xiàn)電離層梯度異常在航監(jiān)測(cè)[13]。然而,受整周模糊度與電離層梯度耦合影響,該算法存在監(jiān)測(cè)盲區(qū),且盲區(qū)范圍直接受限于載波相位觀測(cè)量精度,難以滿足CAT III精密進(jìn)近完好性和可用性需求。為克服這一缺陷,Patel和Khanafseh等人進(jìn)一步優(yōu)化算法,獨(dú)立進(jìn)行整周模糊度固定和檢測(cè)統(tǒng)計(jì)量構(gòu)建,在顧及整周模糊度固定失敗前提下實(shí)現(xiàn)對(duì)電離層梯度異常的無盲區(qū)監(jiān)測(cè)[14]。整周模糊度正確固定是此類方法檢測(cè)統(tǒng)計(jì)量構(gòu)建的前提,然而,傳統(tǒng)GBAS受偽距觀測(cè)精度和觀測(cè)量冗余度限制,其整周模糊度固定可靠性難以滿足電離層梯度異常監(jiān)測(cè)的完好性要求,因此整周模糊度固定失敗成為此類監(jiān)測(cè)方法中一種新的風(fēng)險(xiǎn)源。此外,整周模糊度固定失敗對(duì)誤警和漏檢錯(cuò)誤控制的影響仍然未知。本文旨在實(shí)現(xiàn)對(duì)整周模糊度固定失敗和電離層梯度異常雙重風(fēng)險(xiǎn)源的同步監(jiān)測(cè),進(jìn)一步提升電離層梯度異常監(jiān)測(cè)性能。
本文首先利用多參考接收機(jī)布設(shè)下的載波相位觀測(cè)量構(gòu)建檢測(cè)統(tǒng)計(jì)量,基于電離層無關(guān)模型誤差傳播規(guī)律分析檢測(cè)統(tǒng)計(jì)量的統(tǒng)計(jì)分布特性,進(jìn)而推導(dǎo)顧及整周模糊度解算失敗的電離層梯度異常監(jiān)測(cè)算法,最后基于北斗和GPS真實(shí)數(shù)據(jù)驗(yàn)證所提算法性能并總結(jié)研究成果。
1 檢測(cè)統(tǒng)計(jì)量構(gòu)建
參考接收機(jī)r和任意衛(wèi)星s間的GNSS測(cè)距觀測(cè)方程可表示如下:

其中,p和φ分別表示以米為單位的偽距和載波相位觀測(cè)量,f表示不同信號(hào)頻率,ρ表示衛(wèi)星與接收機(jī)間的幾何距離,c表示光速,tr與ts分別表示接收機(jī)與衛(wèi)星鐘差,μf表示對(duì)應(yīng)頻率f的電離層比例系數(shù),I和STD表示分別電離層延遲誤差和傾斜對(duì)流層延遲誤差,λ表示波長,a表示整周模糊度,εp和εφ分別為偽距和載波相位觀測(cè)噪聲。
假設(shè)任意時(shí)刻僅有一顆衛(wèi)星i受電離層梯度異常影響,則衛(wèi)星對(duì)i-j與接收機(jī)對(duì)m-n間的雙差載波相位觀測(cè)方程可表示為:

其中,Δ?表示雙差算子,eT表示衛(wèi)星與用戶間的單位視線向量,x表示由接收機(jī)對(duì)m-n組成的基線向量,εΔ?φ表示載波相位雙差觀測(cè)噪聲。便于后續(xù)分析,式(2)中的電離層延遲誤差可使用斯坦福大學(xué)提出的電離層梯度模型替代如下[13]:

其中,α表示電離層梯度向量。為盡可能提升電離層梯度異常監(jiān)測(cè)效率,假設(shè)基線與跑道方向平行且接收機(jī)天線坐標(biāo)準(zhǔn)確已知,則電離層梯度檢測(cè)統(tǒng)計(jì)量q表示為,
由于電離層梯度異常監(jiān)測(cè)地面設(shè)施間基線通常處于5 km以內(nèi),屬短基線范疇,經(jīng)模型和差分消除后傾斜對(duì)流層殘差項(xiàng)可忽略不計(jì)。因此,當(dāng)整周模糊度正確解算后,式(4)中構(gòu)建的檢測(cè)統(tǒng)計(jì)量可以有效敏感到電離層梯度信息。此外,由式(3)和式(4)可知,基線長度直接影響檢測(cè)統(tǒng)計(jì)量對(duì)電離層梯度的靈敏度。雖然基線的增加可以使檢測(cè)統(tǒng)計(jì)量敏感到更小尺度的電離層梯度,但是基線過長將導(dǎo)致檢測(cè)統(tǒng)計(jì)量中包含的對(duì)流層殘差過大,不利于整周模糊度解算,因此本文將注重于短基線下的電離層梯度異常監(jiān)測(cè)方法研究。
2 電離層無關(guān)整周模糊度解算
整周模糊度正確解算是實(shí)現(xiàn)電離層梯度有效監(jiān)測(cè)的前提。當(dāng)電離層活動(dòng)異常時(shí),電離層相關(guān)(Ionosphere-based)模糊度解算方法會(huì)受異常梯度影響而失效。因此在監(jiān)測(cè)過程中需使用電離層無關(guān)(Ionosphere-free)模型解算整周模糊度。為保障后續(xù)推導(dǎo)過程簡(jiǎn)潔,將忽略參考衛(wèi)星和參考接收機(jī)角標(biāo)。
為實(shí)現(xiàn)整周模糊度快速可靠解算,采用聯(lián)合寬巷(WL)-窄巷(NL)的兩步法求解整周模糊度,首先使用Melbourne–Wübbena組合求解寬巷模糊度。

其中,表示寬巷模糊度固定解,表示窄項(xiàng)模糊度浮點(diǎn)解。與電離層相關(guān)模型相比,盡管電離層無關(guān)模型可避免整周模糊度解算受電離層梯度異常影響,但同時(shí)擴(kuò)大了觀測(cè)噪聲。為保障整周模糊度可靠解算,有必要采取多歷元平滑技術(shù)抑制組合觀測(cè)噪聲。假設(shè)寬巷、窄巷組合觀測(cè)噪聲均服從零均值高斯分布,則平滑后寬巷和窄項(xiàng)浮點(diǎn)模糊度噪聲標(biāo)準(zhǔn)差可表示如下,

其中,L表示移動(dòng)平滑長度,σΔ?φWL和σΔ?pWL分別表示雙差載波相位寬巷組合和雙差偽距寬巷組合標(biāo)準(zhǔn)差,σΔ?φIF表示雙差電離層無關(guān)組合標(biāo)準(zhǔn)差。由于檢測(cè)統(tǒng)計(jì)量直接基于窄巷模糊度構(gòu)建,因此更為關(guān)注窄巷模糊度固定成功率。目前針對(duì)浮點(diǎn)模糊度有多種固定方法,例如LAMBDA、Bootstrapping和就近取整法。為獲得可解析表達(dá)的模糊度解算成功率,本研究將采用最為簡(jiǎn)單的就近取整法實(shí)現(xiàn)整周模糊度固定[15,16]。因此,窄巷模糊度固定成功率可表示為:

經(jīng)上述分析可知,增加平滑長度有利于抑制組合觀測(cè)噪聲,提高整周模糊度固定成功率,然而,平滑降噪的同時(shí)也增加了模糊度周跳風(fēng)險(xiǎn),此外,過長的平滑長度也無法滿足精密進(jìn)近階段電離層梯度異常監(jiān)測(cè)的實(shí)時(shí)性需求,因此監(jiān)測(cè)算法需要在模糊度固定成功率和平滑長度之間取得平衡。
3 基于完好性監(jiān)測(cè)的電離層梯度異常監(jiān)測(cè)
根據(jù)航空無線電技術(shù)委員會(huì)在CAT III精密進(jìn)近中對(duì)電離層梯度安全區(qū)間的設(shè)定,定義電離層梯度存在兩種互斥假設(shè),分別為H0:電離層梯度正常,即α< 300mm/km ;H1:電離層梯度異常,即α≥ 300mm/km 。為滿足與生命安全相關(guān)的導(dǎo)航定位需求,電離層梯度完好性監(jiān)測(cè)需同時(shí)滿足誤警率和漏檢率雙重約束。本文以兩條基線為例,推導(dǎo)基于多參考接收機(jī)布設(shè)的電離層梯度異常完好性監(jiān)測(cè)方法,更多基線的監(jiān)測(cè)方法可類似推導(dǎo)。
3.1 誤警錯(cuò)誤控制
H0假設(shè)下,對(duì)應(yīng)任意基線的任一檢測(cè)統(tǒng)計(jì)量超過檢測(cè)門限時(shí),我們認(rèn)為電離層梯度監(jiān)測(cè)產(chǎn)生誤警錯(cuò)誤。

其中,Pfa表示電離層梯度異常監(jiān)測(cè)誤警錯(cuò)誤概率,T表示檢測(cè)門限,q1和q2分別表示兩條基線構(gòu)建的檢測(cè)統(tǒng)計(jì)量。顧及不同模糊度固定失敗模式影響,單基線電離層梯度異常監(jiān)測(cè)誤警概率可表示如下:

可以發(fā)現(xiàn)單基線誤警概率由模糊度固定成功和失敗兩種模式共同組成,其中模糊度固定成功模式下的誤警概率可以計(jì)算為:
同理,模糊度固定第i種失敗模式下誤警概率可計(jì)算為:

進(jìn)而雙基線同時(shí)發(fā)生誤警錯(cuò)誤概率則可計(jì)算為:
在檢測(cè)統(tǒng)計(jì)量構(gòu)建過程中,各基線獨(dú)立進(jìn)行模糊度固定,故P{CF1∩2} =P{CF}2,同時(shí)模糊度固定失敗模式包含任一基線模糊度固定失敗和雙基線模糊度固定同時(shí)失敗兩種模式。考慮基線間相關(guān)性,則雙基線模糊度固定正確情況下誤警概率可以計(jì)算為:

其中,矩陣X=[q1q2]T,對(duì)應(yīng)的方差-協(xié)方差矩陣C為:

其中,k表示相關(guān)系數(shù)。同理,當(dāng)整周模糊度固定失敗時(shí),雙基線電離層梯度異常監(jiān)測(cè)誤警概率可以計(jì)算如下:

在已知所需誤警概率前提下,由式(10)可解得檢測(cè)門限T,通過比較檢測(cè)統(tǒng)計(jì)量qi和檢測(cè)門限T,實(shí)現(xiàn)電離層梯度異常監(jiān)測(cè)誤警錯(cuò)誤控制。當(dāng)某對(duì)衛(wèi)星檢測(cè)統(tǒng)計(jì)量超過檢測(cè)門限時(shí),電離層梯度異常監(jiān)測(cè)應(yīng)及時(shí)告警,并將此衛(wèi)星標(biāo)記為故障狀態(tài)。當(dāng)所有檢測(cè)統(tǒng)計(jì)量均處于檢測(cè)門限保護(hù)水平之內(nèi)時(shí),需對(duì)電離層梯度異常監(jiān)測(cè)算法漏檢錯(cuò)誤進(jìn)行評(píng)估,避免該監(jiān)測(cè)算法的可用性丟失。
3.2 漏檢錯(cuò)誤控制
當(dāng)檢測(cè)統(tǒng)計(jì)量通過誤警率約束后,定義H1條件下,任一基線構(gòu)建的檢測(cè)統(tǒng)計(jì)量低于檢測(cè)門限保護(hù)水平時(shí)將產(chǎn)生漏檢錯(cuò)誤。參考誤警錯(cuò)誤控制方法可得,顧及模糊度固定失敗模式下雙基線電離層梯度異常監(jiān)測(cè)漏檢概率Pmd可約束為:

考慮基線之間相關(guān)性,則模糊度解算正確情況下漏檢概率可以計(jì)算如下:


根據(jù)所需的誤警和漏檢概率,當(dāng)同時(shí)滿足下述兩個(gè)條件約束時(shí),即可保證電離層梯度未發(fā)生異常:①檢測(cè)統(tǒng)計(jì)量處于檢測(cè)門限的保護(hù)水平之內(nèi),其中檢測(cè)門限可由式(10)解出;②由式(18)計(jì)算的漏檢率必須小于所需漏檢率。綜上所述,本文所提電離層梯度異常監(jiān)測(cè)方法基于多參考接收機(jī)高精度載波相位觀測(cè)量構(gòu)建雙重檢測(cè)統(tǒng)計(jì)量,即由式(4)計(jì)算得到的檢測(cè)統(tǒng)計(jì)量qi和由式(18)推導(dǎo)出的漏檢概率Pmd。其中使用檢測(cè)統(tǒng)計(jì)量qi與檢測(cè)門限T以控制誤警錯(cuò)誤,通過基于最差保護(hù)原理求得的漏檢率Pmd和所需漏檢率以控制漏檢錯(cuò)誤。通過雙重假設(shè)檢驗(yàn)過程,保證了多參考接收機(jī)布設(shè)下的電離層梯度異常監(jiān)測(cè)方法完好性。
4 仿真驗(yàn)證
下面基于一維數(shù)值仿真驗(yàn)證多參考接收機(jī)布設(shè)電離層梯度異常完好性監(jiān)測(cè)性能。仿真基于北斗雙頻信號(hào)(f1=1561.098 MHz,f2=1207.14 MHz)。假設(shè)雙差偽距觀測(cè)噪聲服從零均值,標(biāo)準(zhǔn)差為80厘米的高斯分布,同理雙差載波相位觀測(cè)噪聲服從零均值、標(biāo)準(zhǔn)差為8毫米的高斯分布,模糊度解算失敗子集考慮固定偏離真值±1周,平滑長度設(shè)置為540歷元,電離層梯度異常先驗(yàn)概率設(shè)置為10-3,則當(dāng)電離層梯度異常大于300 mm/km時(shí),完好性監(jiān)測(cè)所需誤警率和漏檢率分別設(shè)為10-8和10-6。
圖1對(duì)比驗(yàn)證了單基線和雙基線條件下電離層梯度異常監(jiān)測(cè)性能,其中檢測(cè)門限T可由式(10)計(jì)算以滿足誤警率約束。由圖1可知,監(jiān)測(cè)算法漏檢概率與電離層梯度密切相關(guān),異常梯度值越大,其越容易被監(jiān)測(cè),對(duì)應(yīng)的漏檢概率越低。當(dāng)電離層梯度小于100 mm/km時(shí),兩種方法監(jiān)測(cè)性能相當(dāng);當(dāng)電離層梯度處于100-250 mm/km時(shí),雙基線監(jiān)測(cè)漏檢率略低于單基線模式,但仍不滿足所需漏檢率要求;當(dāng)電離層梯度大于250 mm/km時(shí),單基線監(jiān)測(cè)算法計(jì)算漏檢率仍高達(dá)10-4,遠(yuǎn)超所需漏檢率要求,與之相比,雙基線監(jiān)測(cè)算法計(jì)算漏檢率僅為10-12,滿足精密進(jìn)近階段電離層梯度異常監(jiān)測(cè)需求,這表明雙基線電離層梯度異常監(jiān)測(cè)方法有利于漏檢錯(cuò)誤控制。

圖1 單/雙基線電離層梯度異常監(jiān)測(cè)漏檢概率Fig.1 Missing detection probability of single / double baseline ionospheric anomaly gradient monitoring
本文所提電離層梯度異常監(jiān)測(cè)算法中,在同時(shí)滿足誤警和漏檢錯(cuò)誤控制前提下,基線長度決定檢測(cè)統(tǒng)計(jì)量可敏感到的最小電離層梯度異常,為驗(yàn)證不同基線配置下電離層梯度異常監(jiān)測(cè)性能,本文基于一維數(shù)值仿真,針對(duì)六組不同基線配置驗(yàn)證最優(yōu)基線配置方式,其中多參考接收機(jī)基線配置策略如表1所示,模糊度解算失敗子集仍考慮固定偏離真值±1周,平滑長度設(shè)置為400歷元。

表1 多參考接收機(jī)基線配置方式Tab.1 Baseline configuration of multi reference receivers
圖2采用遍歷方法對(duì)比驗(yàn)證了不同基線配置下電離層梯度異常監(jiān)測(cè)性能。可以發(fā)現(xiàn),基線長度比直接影響著異常梯度監(jiān)測(cè)漏檢錯(cuò)誤控制性能,受不同基線檢測(cè)統(tǒng)計(jì)量間相關(guān)性影響,當(dāng)基線長度比超過1/5時(shí),漏檢錯(cuò)誤控制性能隨基線比增加逐漸降低,且無法滿足所需漏檢率要求;而當(dāng)基線長度比小于1/5時(shí),雙基線監(jiān)測(cè)算法漏檢性能均能滿足需求。這表明,不同基線配置方式將對(duì)電離層梯度異常監(jiān)測(cè)性能產(chǎn)生較大影響。此外,兩基線間的長度之比不宜過大(應(yīng)控制在1/5以內(nèi)),較大的基線長度差有利于電離層梯度異常的監(jiān)測(cè)。因此,后續(xù)實(shí)際應(yīng)用中,需結(jié)合所需漏檢性能以及基線布設(shè)條件,適當(dāng)選擇基線配置方式。

圖2 不同基線配置下電離層梯度異常監(jiān)測(cè)漏檢概率Fig.2 Missing probability of ionospheric anomaly gradient monitoring under different baseline configurations
5 實(shí)驗(yàn)與討論
為有效驗(yàn)證所提方法監(jiān)測(cè)性能,本文基于香港大地測(cè)量服務(wù)網(wǎng)收集了 BDS雙頻觀測(cè)數(shù)據(jù)(https://www.geodetic.gov.hk/sc/satref/downv.aspx)。選用三個(gè)國際GNSS服務(wù)站(HKWS、HKSS和HKKS)組成兩條基線作為電離層梯度監(jiān)測(cè)地面設(shè)施,基線長度分別為6.8 km和7.7 km,屬于短基線范圍,故后續(xù)分析中忽略了雙差對(duì)流層延遲引起的大氣偏差。本文首先使用了2017年3月19日-3月20日兩天BDS原始數(shù)據(jù)來評(píng)估所提的算法監(jiān)測(cè)性能,數(shù)據(jù)采樣周期為30 s,共計(jì)5760歷元。數(shù)據(jù)處理中采用高度角加權(quán),截止高程角設(shè)為10度,使用方差-協(xié)方差矩陣對(duì)角元素表示雙差模糊度精度,所需的誤警和漏檢概率分別設(shè)置為10-8和10-6。
為驗(yàn)證所選數(shù)據(jù)中電離層活動(dòng)處于正常水平,本文基于RTKLIB軟件對(duì)所選數(shù)據(jù)進(jìn)行后處理,并將載波相位雙差殘差提取如圖3所示。由殘差提取結(jié)果可知,每顆衛(wèi)星的載波相位殘差均具有零均值特性,且最大偏差仍小于用以表示觀測(cè)量精度的方差-協(xié)方差矩陣對(duì)角線元素。因此,殘差中的電離層延遲和對(duì)流層延遲可看作觀測(cè)噪聲,這表示對(duì)于選定的短基線數(shù)據(jù)集,電離層和對(duì)流層均處于無故障狀態(tài),且數(shù)據(jù)質(zhì)量較高。

圖3 載波相位雙差殘差(不同顏色曲線對(duì)應(yīng)不同衛(wèi)星雙差殘差)Fig.3 Double-difference measurement residual(Different colors represent the residuals from each satellite)
在檢測(cè)統(tǒng)計(jì)量構(gòu)建過程中,多歷元平滑長度直接決定著整周模糊度固定成功率,進(jìn)而間接影響著電離層梯度異常監(jiān)測(cè)性能。本文所提聯(lián)合寬巷-窄巷的兩步法在不同平滑長度下整周模糊度固定成功率如圖4所示。當(dāng)平滑長度小于300歷元時(shí),模糊度固定成功率隨著平滑長度增加而提高;然而,當(dāng)平滑長度超過300歷元時(shí),受周跳等因素導(dǎo)致平滑重置影響,其固定成功率隨平滑長度增加反而降低。模糊度固定成功率的測(cè)試結(jié)果表明,在電離層梯度異常監(jiān)測(cè)過程中,必須合理控制平滑長度,以提升誤警和漏檢錯(cuò)誤控制水平。

圖4 模糊度固定成功率Fig.4 Ambiguity resolution success rate
首先,基于無故障模式驗(yàn)證電離層梯度異常監(jiān)測(cè)性能。基于上述分析,平滑長度選為300歷元以保障整周模糊度可靠固定。通過同步平滑載波相位觀測(cè)量和電離層無關(guān)組合觀測(cè)量構(gòu)建檢測(cè)統(tǒng)計(jì)量如圖5所示。結(jié)果表明,所有檢測(cè)統(tǒng)計(jì)量均處于檢測(cè)門限保護(hù)水平之內(nèi),此外,檢測(cè)統(tǒng)計(jì)量中的噪聲經(jīng)多歷元平滑后已被約束在0.05周以內(nèi)。這驗(yàn)證了多歷元平滑不僅有利于整周模糊度可靠固定,還有利于提升檢測(cè)統(tǒng)計(jì)量對(duì)電離層梯度異常的靈敏度。

圖5 電離層梯度監(jiān)測(cè)檢測(cè)統(tǒng)計(jì)量以及檢測(cè)門限(不同顏色曲線對(duì)應(yīng)各衛(wèi)星所構(gòu)建的檢測(cè)統(tǒng)計(jì)量,灰色虛線表示檢測(cè)門限)Fig.5 Test statistics and detection thresholds for the ionospheric anomaly gradient monitoring(Different color correspond to the test statistics constructed by each satellite, the gray dotted line indicates the detection threshold)
當(dāng)檢測(cè)統(tǒng)計(jì)量全部處于檢測(cè)門限保護(hù)水平之內(nèi),監(jiān)測(cè)算法漏檢概率計(jì)算結(jié)果如圖6所示。由圖可知,當(dāng)衛(wèi)星高度角較低時(shí),少數(shù)計(jì)算漏檢率超過所需漏檢率10-6進(jìn)而導(dǎo)致電離層梯度監(jiān)測(cè)產(chǎn)生誤警錯(cuò)誤,造成電離層梯度異常監(jiān)測(cè)功率損失,然而,該損失可通過幾何分布與高度角雙重篩選控制在0.1%以內(nèi),保證絕大部分計(jì)算漏檢率均小于所需漏檢率要求,該結(jié)果驗(yàn)證了所提監(jiān)測(cè)算法可同時(shí)滿足誤警和漏檢錯(cuò)誤控制要求。

圖6 電離層梯度異常監(jiān)測(cè)計(jì)算漏檢率Fig.6 Calculated probability of missed detection
其次,在電離層故障模式下測(cè)試所提出的監(jiān)測(cè)算法誤警和漏檢錯(cuò)誤控制性能。香港處于低緯度地區(qū),屬電離層異常高發(fā)區(qū),國際民航組織亞太航空規(guī)劃與實(shí)施小組使用長期電離層異常監(jiān)測(cè)設(shè)施于2013年4月11日在基線HKSS-HKWS上基于GPS雙頻數(shù)據(jù)觀測(cè)到高達(dá)477.7 mm/km的電離層梯度異常[17]。為保障故障模式下測(cè)試合理性,后續(xù)分析將使用此異常數(shù)據(jù)開展性能驗(yàn)證。注意,其余實(shí)驗(yàn)參數(shù)設(shè)置均與無故障模式下保持一致。此外,為驗(yàn)證本文所提方法在同步監(jiān)測(cè)整周模糊度固定失敗和電離層梯度異常雙重風(fēng)險(xiǎn)源方面的優(yōu)勢(shì),傳統(tǒng)單頻GBAS電離層梯度異常監(jiān)測(cè)方法將作為對(duì)比共同開展性能測(cè)試。電離層梯度異常監(jiān)測(cè)結(jié)果如圖7所示。
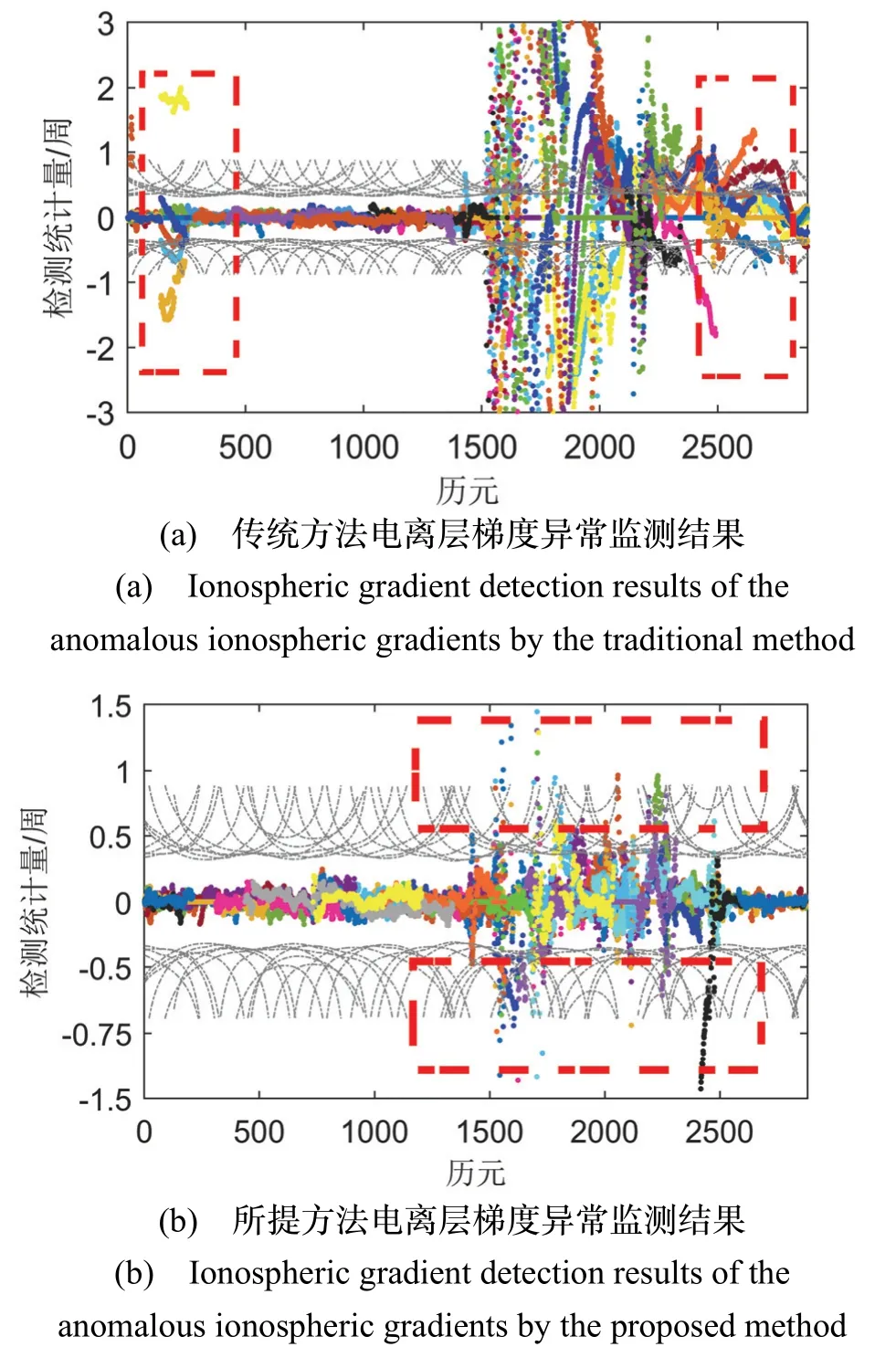
圖7 不同顏色曲線對(duì)應(yīng)各衛(wèi)星所構(gòu)建的檢測(cè)統(tǒng)計(jì)量(灰色虛線表示檢測(cè)門限)Fig.7 Different color correspond to the test statistics onstructed by each satellite (the gray dotted line indicates the detection threshold)
根據(jù)觀測(cè)記錄可知,電離層的異常波動(dòng)發(fā)生于當(dāng)?shù)貢r(shí)間11:50(1420歷元),但其梯度值并未超過300 mm/km,直至16:30(1980歷元)其梯度值達(dá)到峰值。對(duì)比圖7可知,當(dāng)電離層出現(xiàn)異常波動(dòng)時(shí),基于傳統(tǒng)方法和本文所提方法構(gòu)建的檢測(cè)統(tǒng)計(jì)量均能敏感到電離層梯度異常信息,表現(xiàn)為檢測(cè)統(tǒng)計(jì)量超出檢測(cè)門限保護(hù)水平而及時(shí)向用戶告警,這表明兩種電離層梯度異常監(jiān)測(cè)方法均可實(shí)現(xiàn)電離層梯度異常監(jiān)測(cè)。此外,也驗(yàn)證了電離層無關(guān)組合的引入有效保障了整周模糊度固定不受電離層梯度異常的影響。然而,當(dāng)電離層波動(dòng)正常時(shí),傳統(tǒng)方法受偽距觀測(cè)精度和平滑長度限制,其整周模糊度固定可靠性難以滿足電離層梯度異常監(jiān)測(cè)完好性要求,體現(xiàn)為圖中紅框中部分檢測(cè)統(tǒng)計(jì)量超出檢測(cè)門限保護(hù)水平,進(jìn)而引發(fā)誤警錯(cuò)誤;反觀本文所提方法,得益于聯(lián)合WL-NL兩步法可靠的整周模糊度解算性能,其檢測(cè)統(tǒng)計(jì)量均處于檢測(cè)門限保護(hù)水平之內(nèi),該結(jié)果表明誤警錯(cuò)誤概率可滿足所需誤警性能要求。因此,在相同平滑長度下,本文所提方法具有更優(yōu)秀的誤警錯(cuò)誤控制性能。另一方面,在電離層異常波動(dòng)期間,得益于電離層無關(guān)整周模糊度可靠解算與多參考接收機(jī)布設(shè)下漏檢錯(cuò)誤有效控制,即使電離層梯度未超過300 mm/km,其檢測(cè)統(tǒng)計(jì)量仍然超過檢測(cè)門限保護(hù)水平,這表明所提算法可在滿足所需漏檢性能要求前提下,敏感到更小尺度電離層梯度異常,與仿真結(jié)果相一致。綜上所述,實(shí)驗(yàn)結(jié)果表明所提多參考接收機(jī)電離層梯度異常監(jiān)測(cè)算法可在同時(shí)滿足誤警和漏檢錯(cuò)誤控制要求前提下實(shí)現(xiàn)對(duì)異常電離層梯度和整周模糊度固定失敗的同步監(jiān)測(cè)。
6 結(jié) 論
本文提出一種基于多參考接收機(jī)布設(shè)的GBAS電離層梯度異常監(jiān)測(cè)算法。以多參考接收機(jī)布設(shè)為硬件基礎(chǔ),使用載波相位觀測(cè)量構(gòu)建檢測(cè)統(tǒng)計(jì)量,通過不同整周模糊度固定失敗模式間誤警和漏檢率分配,完成對(duì)二者的同時(shí)控制,進(jìn)而實(shí)現(xiàn)電離層梯度異常完好性監(jiān)測(cè)。
仿真結(jié)果表明,在滿足誤警和漏檢率前提下,多參考接收機(jī)配置有利于電離層梯度異常監(jiān)測(cè)性能提升。此外,基線長度直接影響著最小可監(jiān)測(cè)電離層梯度值,且不同基線配置方式將對(duì)其監(jiān)測(cè)性能產(chǎn)生較大影響,經(jīng)數(shù)值遍歷仿真驗(yàn)證,基線比控制在1/5以內(nèi)時(shí)其誤警和漏檢錯(cuò)誤控制性能達(dá)到最優(yōu)。
使用無故障條件下的BDS數(shù)據(jù),驗(yàn)證了多歷元平滑在保障整周模糊度可靠固定的同時(shí)還有利于最小可監(jiān)測(cè)電離層梯度異常提升。使用電離層波動(dòng)異常下的GPS數(shù)據(jù),驗(yàn)證了所提算法對(duì)異常梯度監(jiān)測(cè)的有效性。結(jié)果表明,所提算法可在同時(shí)滿足誤警率和漏檢率約束前提下實(shí)現(xiàn)電離層梯度異常與整周模糊度固定失敗的有效監(jiān)測(cè)。因此,所提基于多參考接收機(jī)布設(shè)的GBAS電離層梯度異常監(jiān)測(cè)算法適用于高完好性需求的生命安全相關(guān)導(dǎo)航服務(wù)。
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48