基于改進RRT算法的移動機器人路徑規劃
2021-12-07 03:38:10黃文青陳凌珊李婷婷尚大偉
智能計算機與應用 2021年7期
關鍵詞:移動機器人
黃文青 陳凌珊 李婷婷 尚大偉
摘 要: RRT算法是一種能夠處理障礙物和差分約束的問題的算法,被廣泛應用于移動機器人的路徑規劃。針對于基本RRT算法存在的隨機性較大和所求解路徑非最優等問題,需要對其進行改進從而優化性能與運行效率。本文主要采用雙向RRT算法融合人工勢場法的方案進行改進后的路徑規劃,然后借助Dijkstra算法進一步處理所求解的路徑,以尋求路徑的最優解。仿真結果表明,本方案可以減少基本RRT算法隨機性的影響,提高移動機器人路徑規劃的效率。
關鍵詞: 移動機器人; 改進RRT算法; 融合人工勢場法; 路徑規劃
文章編號: 2095-2163(2021)07-0032-05中圖分類號:TP242文獻標志碼: A
Mobile robot path planning based on improved RRT algorithm
HUANG Wenqing, CHEN Lingshan,? LI Tingting, SHANG Dawei
(School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620, China)
【Abstract】RRT algorithm is an algorithm that can deal with obstacles and differential constraints, which is widely used in path planning of mobile robots. In view of the large randomness of the basic RRT algorithm and the non-optimal path of the solution, it needs to be improved to optimize performance and operating efficiency. This paper mainly adopts the two-way RRT algorithm fusing artificial potential field method to carry out the improved path planning, and then uses the Dijkstra algorithm to further process the solved path for finding the optimal solution of the path. The simulation results show that this scheme can reduce the influence of the randomness of the basic RRT algorithm and improve the efficiency of mobile robot path planning.
【Key words】mobile robot; improved RRT algorithm; fused artificial potential field method; path planning
0 引 言
隨著智能制造行業的快速發展,移動機器人正在發揮著越來越重要作用,人們對其的需求量也在不斷增加。在使用過程中,移動機器人需要自主、安全且快速地避開障礙物,并找到到達目標位置的可行路徑,因此路徑規劃問題是移動機器人研究領域中的一個熱點[1]。國內外學者針對此問題提出了許多可行的方法,常用的有A*算法、人工勢場法、概率路線圖(Probability Roadmap Method,PRM)算法、蟻群算法、遺傳算法、粒子群優化算法等[2]。
作為一種能解決高維環境下路徑規劃問題的有效算法,快速搜索隨機樹(Rapidly Exploring Random Tree,RRT)最早由Lavalle等人提出[3]。相比其它算法,RRT算法的收斂速度較快,能夠保證概率完備性[4]。當然,由于隨機采樣的特點,RRT算法的求解效率比較低。此外,其生成的路徑結果比較粗糙,只是一個可行解而并非最優路徑[5]。針對RRT算法存在的問題,國內外學者嘗試了很多種改進方法。其中,國外比較有代表性的有RRT-Connect算法(Kuffner等人于2000年提出)[6]、RRT*算法(漸進最優)[7]、B-RRT*算法(有選擇性地產生新節點)[8]、IB-RRT*算法(在B-RRT*算法的基礎上進一步提高搜索速度)[9]和RRT*-Connect算法(使所求解的路徑向最優解收斂)[10]等。國內對于RRT算法的研究相對晚一些,王道威等人[11]在2016年提出了動態步長的RRT算法,潘思宇等人[12]在2017年提出了一種引入節點啟發式采樣函數的RRT*算法,陳波芝等人[13]在2018年提出了用于雙機械臂避障的改進RRT算法。
本文采用雙向RRT算法融合人工勢場法進行改進后的路徑規劃,再利用Dijkstra算法對所求得的路徑再次優化,使得移動機器人能夠迅速有效地避開各類障礙物,以提高路徑規劃的效率。
1 基本RRT算法
1.1 RRT算法的基本思想
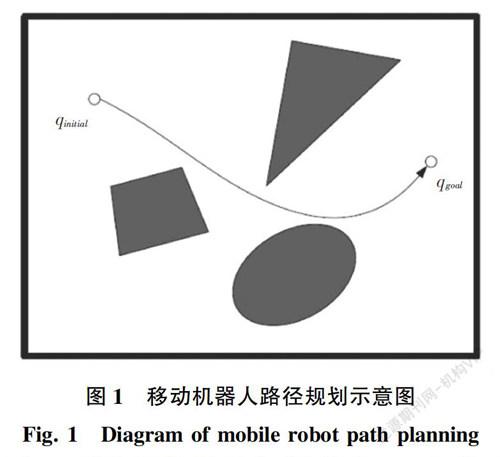
對于移動機器人而言,路徑規劃是指其能夠在具有障礙物的較復雜環境中找到一條由起始點qinitial抵達目標點qgoal的路徑,且在運動過程中不碰到周圍的障礙物[14],如圖1所示。
作為一種常用的路徑規劃算法,RRT算法是適用于高維空間和復雜約束的問題,這里的約束主要是由障礙物造成的代數約束和由環境變化帶來的微分約束。其基本思想是移動機器人在向目標點運動的過程中借助產生的隨機點來決定步長,從而避開障礙物。求解時不需要對移動機器人進行系統建模,也無需對搜索區域進行幾何劃分,搜索的范圍較廣、覆蓋率較高。
1.2 RRT算法的具體過程
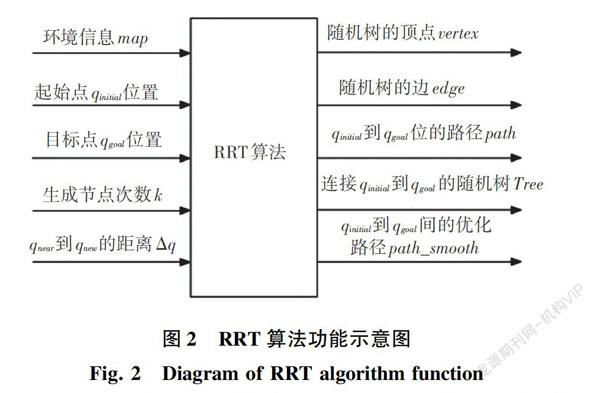
根據RRT算法的基本思想,若要構建RRT算法,必須要先明確算法的輸入與輸出。RRT算法的輸入主要有環境信息、起終點位置、節點的生成次數以及隨機點與最近樹節點的距離;輸出主要有隨機樹的頂點與邊、起終點間的原始路徑、生成的連接起終點的隨機樹以及平滑處理后的優化路徑,如圖2所示。
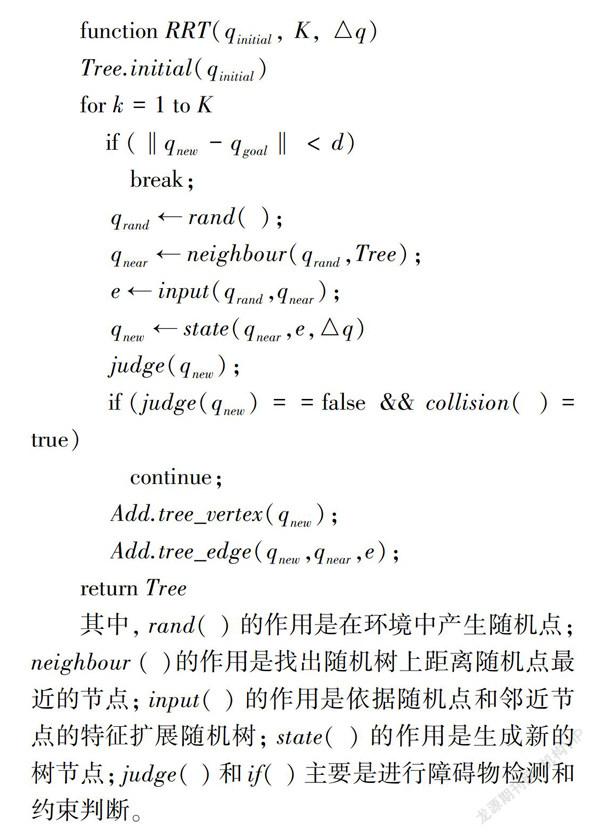
總地來說,RRT算法的過程可以分為3部分:插入新的節點、障礙物檢測和非完整約束檢測。當且僅當這兩類檢測均滿足要求時,才能加入新的節點。其偽代碼如下:
其中,rand( )的作用是在環境中產生隨機點;neighbour( )的作用是找出隨機樹上距離隨機點最近的節點;input( )的作用是依據隨機點和鄰近節點的特征擴展隨機樹;state( )的作用是生成新的樹節點;judge( )和if( )主要是進行障礙物檢測和約束判斷。
2 RRT算法的改進
針對RRT算法在較復雜環境中隨機性較大、收斂速度較慢和運行效率較低等問題,本文主要做出如下改進。
2.1 雙向RRT算法
基本RRT算法的搜索過程是從起始點qinitial開始生成隨機樹,從而延伸至整個狀態空間。很明顯,當狀態空間的環境較為復雜時,譬如障礙物較多或者運行路徑較狹小時,算法的收斂速度會大幅下降,導致需要花費很長的時間來計算路徑,有時甚至得不到結果,如圖3所示。
針對上述問題,雙向RRT算法能夠從目標點qgoal生成隨機樹,也是進行隨機采樣并擴展,這就使得對狀態空間的搜索效率得到提高。需要提出的是,從目標點qgoal生成的隨機樹擴展方式是不同的,其傾向于朝起始點qinitial的隨機樹新節點qnew擴展。在整個路徑的搜尋過程中,這兩棵隨機樹能夠交替擴展。當qgoal的隨機樹無法擴展,或者其新節點qnew與qnew重合時,退出算法。此時,由目標點qgoal和起始點qinitial生成的2棵隨機樹互相連接,一個路徑的可行解就得到了,如圖4所示。很顯然,相對于基本RRT算法的搜索過程,這種雙向搜索過程步長更大,隨機樹的生長速度也更快。這使得雙向RRT算法的運算效率更快。
由于目標點qgoal隨機樹的擴展方式有所不同,且也涉及到障礙物的判斷與碰撞檢測,這里給出部分偽代碼見如下。
2.2 人工勢場法的融合
為了進一步提高RRT算法的搜索效率,降低隨機性,本文利用人工勢場法的目標導向特征來引導隨機樹向著目標點qgoal擴展,使RRT算法能盡快完成路徑規劃。
人工勢場法最早是Khatib提出的[15],主要定義了目標點qgoal的引力勢場和斥力勢場,繼而引導移動機器人朝著勢場函數負梯度方向運動,從而避免與障礙物碰撞。其中,引力勢場函數為:
斥力勢場函數為:
相應地,其負梯度分別為:
其中,kp為引力系數;kr為斥力系數;xgoal為目標點qgoal的位置;y為移動機器人與障礙物的距離;y0為障礙物的斥力作用的最大范圍。
根據人工勢場法的特性,其與雙向RRT法融合可以進一步修正RRT算法的隨機樹擴展方向,提高算法的實時性,避免產生局部極小值,優化移動機器人路徑規劃的能力。
為此,需要給隨機樹的節點qnew構造目標引力函數P(qnew)。目標引力函數和隨機樹的擴展機制共同作用,繼而引導節點qnew朝著目標點延伸。因此,qnew的擴展函數可表示為:
其中,T(qnew)為RRT算法的隨機擴展函數。
由此構造出的目標引力函數為:
其中,ρ為引力系數。當ρ取不同的值時,隨機樹向目標點qgoal的導向性是不同的。經過與人工勢場法的融合,RRT算法隨機點qnew的生成可以通過如下公式進行計算:
2.3 路徑處理
由于雙向RRT算法仍具有一定的隨機性,其與人工勢場法融合后還是會有多余的隨機點。由于不具有目標點的導向性,這些隨機節點并沒有意義,需要對其進行刪減。為此,本文選擇Dijkstra算法處理所求路徑結果。
Dijkstra算法是以起始點作中心逐步向外求解到圖中(一般為有向圖)其余頂點的最短路徑,直到抵達目標點。一般來說,Dijkstra算法主要分為3部分,對此擬做闡釋分述如下。
(1)初始化起始點、目標點、步長等信息,定義相應數組來所求結果。
(2)循環迭代,依次求解起始點到各頂點之間的最短路徑。因為每次求解都涉及一個頂點,所以循環次數比頂點總數少1。
(3)根據結果將相關頂點和距離信息存入對應數組中。
具體來說,連接隨機樹中的各個節點qinitial、q1、q2、……、qgoal,碰到障礙物就停止,并存儲當前節點qt,然后從下一個節點qt+1起再次連接至qgoal,過程中如有障礙物做類似處理。最后,數組{qt}中的每個元素就是處理后的路徑上的各節點。
綜上所述,整個改進算法的流程如圖5所示。
3 仿真試驗
本次改進RRT算法試驗的仿真平臺為Matlab R2017b,環境的空間范圍為550 mm*550 mm,各類黑色的幾何形狀為障礙物。初始化移動機器人設置,起始點qinitial的坐標設為(10,10),目標點qgoal的坐標設為(500,500)。RRT算法的步長設為5,最大循環次數為10 000。
基本RRT算法的搜索過程和生成路徑如圖6所示,改進算法的搜索過程和生成路徑如圖7所示。表1記錄的是這2種情形下的路徑長度和規劃所用時間。
由此可見,改進后的算法能夠規劃出更優化的路徑,而且所用時間更短。
4 結束語
本文分析了基本RRT算法的特征,并對其存在的相關問題進行改進。通過雙向RRT算法與人工勢場法的融合,路徑搜索過程的目標導向性更強,路徑得到了優化,時間也進一步縮短,具有良好的應用前景。
參考文獻
[1]王坤, 曾國輝, 魯敦科, 等. 基于改進漸進最優的雙向快速擴展隨機樹的移動機器人路徑規劃算法[J]. 計算機應用, 2019, 39(5): 1312-1317.
[2]SFEIR J, SAAD M, Saliah-Hassane H: An improved artificial potential field approach to real-time mobile robot path planning in an nnknown environment [C]// IEEE International Symposium on Robotic and Sensors Environments. QC, Canada :IEEE,2011:208-213.
[3]LAVALLE S M, KUFFNER J J. Randomized kinodynamic planning [C]//Proceedings of the 1999 IEEE International Conference on Robotics and Automation. Piscataway,NJ:IEEE,1999:473-479.
[4]NGUYEN M K, LEONARD J, STEPHANE R. ART-RRT: As-rigid-as-possible exploration of ligand unbinding pathways [J]. Journal of Computational Chemistry, 2018, 39(11):665-678.
[5]徐秉超, 嚴華. 一種改進的雙向快速搜索隨機樹算法[J]. 科學技術與工程, 2020, 20(19): 7765-7771.
[6]KUFFNER J J, LAVALLE S M. RRT-connect: An efficient approach to single-query path planning[C]//Proceedings of the 2000 IEEE International Conference on Robotics and Automation. Piscataway,NJ: IEEE,2000:995-1001.
[7]KARAMAN S, FRAZZOLI E. Sampling-based algorithms for optimal motion plannings [J].The International Journal of Robotics Research, 2011, 30(7):846-894.
[8]Jordan M, Perez A. Optimal bidirectional rapidly-exploring random trees [R]. Cambridge, MA :Computer Science and Artificial Intelligence Laboratory, Massachusetts Institute of Technology, 2013.
[9]QURESHI A H, AYAZ Y. Intelligent bidirectional rapidly-exploring random trees for optimal motion planning in complex cluttered environments [J]. Robotics and Autonomous Systems, 2015, 68:1-11.
[10]KLEMM S, OBERLANDER J, HERMANN A, et al. RRT*-Connect: Faster, asymptotically optimal motion planning[C]//2015 IEEE International Conference on Robotics and Biomumetics. Seattle, WA,USA:IEEE, 2015:1670-1677.
[11]王道威, 朱明富, 劉慧. 動態步長的RRT路徑規劃算法[J]. 計算機技術與發展, 2016(3): 105-107,112.
[12]潘思宇, 徐向榮. 基于改進RRT*的移動機器人運動規劃算法[J]. 山西大學學報(自然科學版), 2017, 40(2): 244- 254.
[13]陳波芝, 陸亮, 雷新宇, 等. 基于改進快速擴展隨機數算法的雙機械臂協同避障規劃方法[J]. 中國機械工程, 2018, 29(10): 1220- 1226.
[14]金丹. 基于改進RRT算法的移動機器人路徑規劃[J]. 現代計算機, 2018(6): 41-44.
[15]KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots[M]//COX I J, WILFONG G T. Autonomous robot behicles. New York, NY :Springer,1986:396-404
基金項目: 上海工程技術大學研究生科研創新項目(0231-E3-0903-19-01213)。
作者簡介: 黃文青(1996-),男,碩士研究生,主要研究方向:汽車智能化控制和測試。
通訊作者: 黃文青Email:394737977@qq.com
收稿日期: 2020-12-24
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
