合成孔徑與真實孔徑邊坡雷達技術對比分析
2021-12-08 03:11:10韋忠跟
露天采礦技術 2021年6期
關鍵詞:大氣
韋忠跟
(1.中煤科工集團沈陽研究院有限公司,遼寧 撫順 113122;2.煤礦安全技術國家重點實驗室,遼寧 撫順 113122)
目前,邊坡雷達是全世界范圍內邊坡安全監測領域的領先技術,這項新技術與傳統邊坡變形監測手段相比,具有非接觸性、監測精度高、密度大、覆蓋面積廣、更新速度快、監測距離遠等特點,主要應用于大壩、邊坡、山體、建筑物方面的微小位移監測及災害預警[1-2]。近年來,邊坡雷達在露天礦軟巖邊坡的長期監測,巖質邊坡的臨滑預警方面得到廣泛應用,尤其在預測預警片幫及滑坡等地質災害方面具有較高的準確率。
邊坡雷達技術在邊坡監測預警方面具有明顯優勢,但對于不同種類的邊坡雷達技術,其工作原理和工程應用效果存在顯著差異,因此不同地質條件的礦山邊坡要選擇不同的雷達監測手段。目前,邊坡雷達按工作原理可分為合成孔徑雷達和真實孔徑雷達,2 種雷達在技術原理、工作范圍、參數校正、預測預警等方面有較大差別。為此,通過合成孔徑雷達和真實孔徑雷達2 種雷達詳細的技術和應用對比,分析各自的表現能力和實際應用效果,得出不同種類雷達在不同礦山的適用性,指導礦山合理地選擇邊坡雷達技術進行監測和預警,保證監測范圍內作業車輛及人員的安全。
1 合成孔徑雷達和真實孔徑雷達概述
1)合成孔徑雷達。合成孔徑雷達以意大利IDS公司的IBIS 邊坡雷達為代表。合成孔徑雷達技術衍生于航空航天地球測繪技術,具有掃描距離遠,覆蓋范圍廣的特點,但是其掃描所得圖像為二維圖像,在邊坡監測領域應用時需有外部的DTM 三維地形數據的支持才能轉換為三維圖像,進而對邊坡位移進行監測,DTM 數據本身帶有一定的誤差,從而影響了該技術測量邊坡的三維變形精度[3-5]。
2)真實孔經雷達。真實孔徑雷達以南非Reutech公司的MSR 邊坡雷達為代表。真實孔徑雷達技術是針對露天采礦等人工高邊坡穩定監測要求而開發的新一代變形監測雷達技術,其更加適應現代巖土工程施工過程中產生的人工邊坡監測,無需DTM 三維 模型輔助,可直接獲得三維邊坡的變形數據,同時具備移動性強的優勢,已逐漸成為工程邊坡監測領域的主流技術[6-11]。
2 合成孔徑雷達和其實孔徑雷達技術對比
2.1 掃描工作原理
合成孔徑雷達和真實孔徑雷達對邊坡進行掃描的工作原理示意圖如圖1。
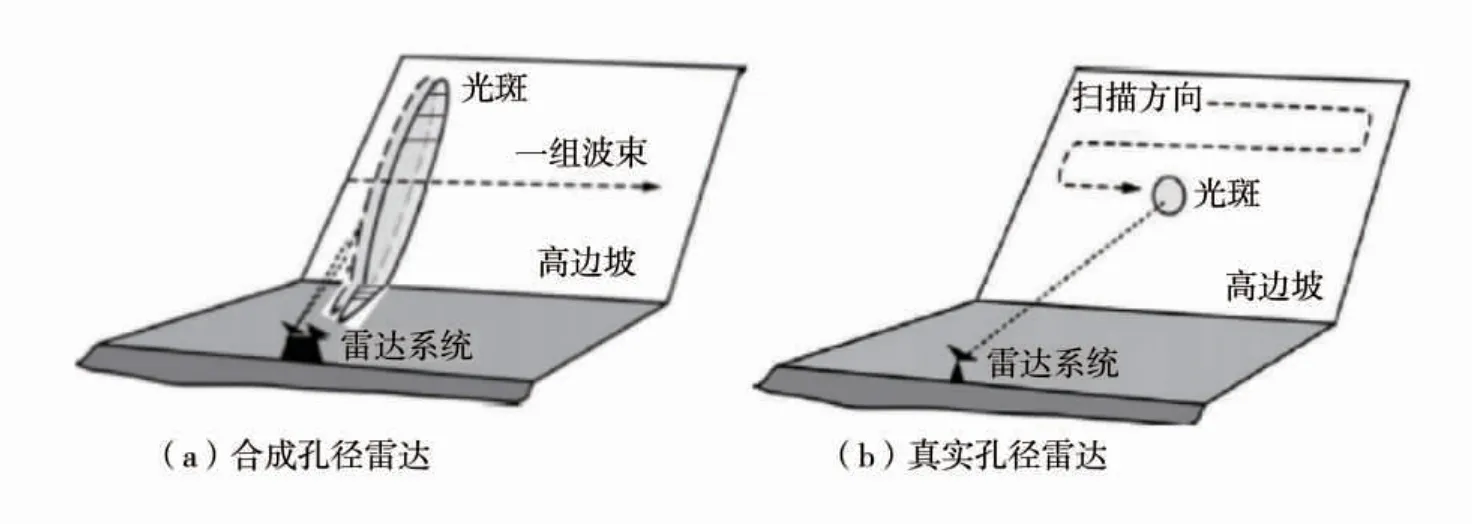
圖1 合成和真實孔徑雷達掃描工作原理示意圖
合成孔徑雷達掃描方式是信號發射天線在2 m長的水平導軌上沿著與邊坡平行的方向進行水平步進移動,雷達發射的角度是固定值;而真實孔徑雷達掃描方式則是發射天線在水平和垂直方向進行大角度轉動,對邊坡實施步進式逐行掃描,其掃描范圍取決于發射天線的水平和垂直轉動角度。
當雷達的布設位置須與被測邊坡距離較近時,由于合成孔徑雷達掃描角度為固定值且角度遠小于真實孔徑雷達,實際監測范圍大小受到制約,因此該情況下很難滿足實際監測工程的需要;當雷達的布設位置須與被測邊坡距離較遠時,較小的雷達掃描角度即能完成大范圍的監測任務,所以該情況下兩者監測效果相當。
2.2 云圖顯示效果
合成孔徑雷達掃描示意圖如圖2,真實孔徑雷達掃描示意圖如圖3。
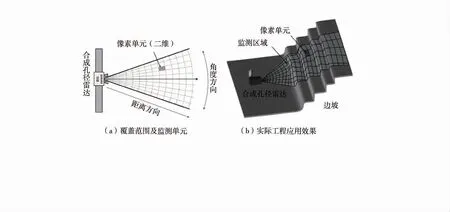
圖2 合成孔徑雷達掃描示意圖
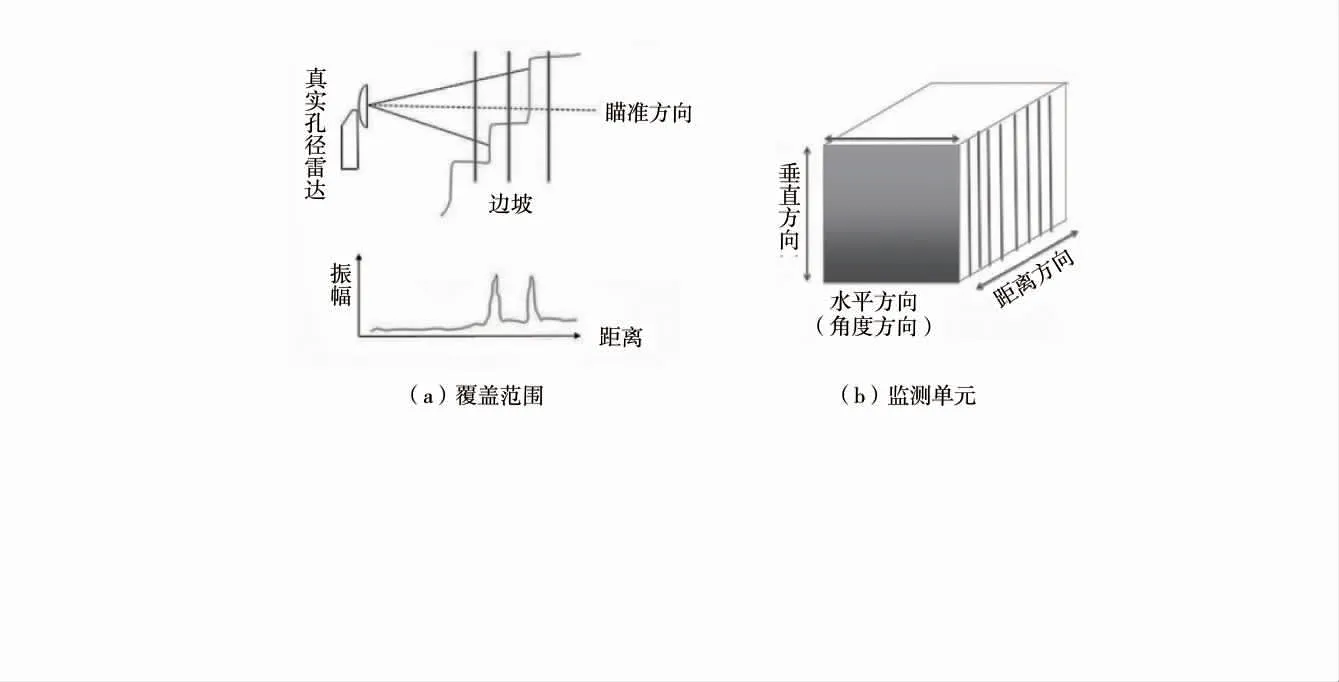
圖3 真實孔徑雷達掃描示意圖
合成孔徑和真實孔徑雷達在監測單元方面具有較大的,對于合成孔徑雷達,通過合成孔徑技術(SAR)和線性調頻連續波技術(SF-CW)的結合,監測區域就被分割成很多二維的小單元,掃描得到的圖像是二維圖像,因此在處理單元上是二維數據,而真實孔徑雷達通過水平方向和垂直方向的步進式機械旋轉以及調頻連續波技術,掃描得到的是三維圖像,處理單元是三維數據。由于監測單元的不同,2種雷達在數據采集過程中得到的位移云圖有很明顯的差別。
1)合成孔徑雷達掃描得到的是二維位移云圖,在進行邊坡穩定性監測的過程中,需要添加外部的DTM 三維地形圖,才能生成最終的用戶顯示,再進行三維空間的穩定性監測和分析。合成孔徑雷達的三維位移云圖的轉化如圖4。
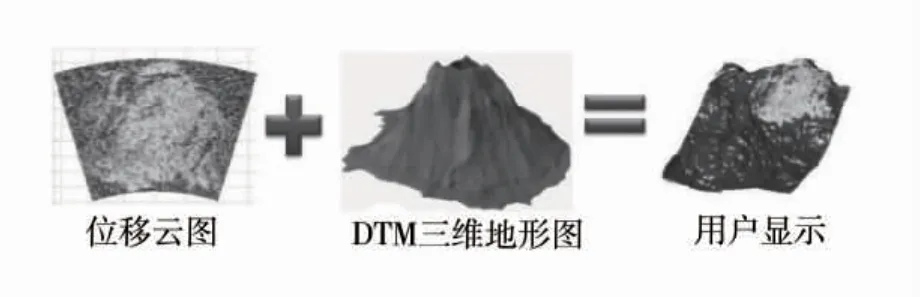
圖4 合成孔徑雷達的三維位移云圖的轉化
2)真實孔徑雷達掃描得到真實的三維位移云圖,因此不需要使用外部的三維地形圖數據即可生成實際邊坡的三維用戶顯示,進而對邊坡的穩定性進行監測和分析。
2.3 數據更新速度
一般情況下,由于雷達位置距離被測邊坡較遠,雷達波在傳播過程中受到大氣溫度、濕度和壓力等氣候條件的影響,因此在使用雷達進行邊坡監測時,需要校正大氣條件對于雷達波的影響。
合成孔徑雷達是通過對比一系列已采集的歷史數據(一般為15 組圖像數據)后,通過計算尋找邊坡表面受大氣條件影響較小的穩定點,然后根據該穩定點來建立大氣影響修正模型,進而校正下1 幅的掃描圖像。當監測區域大氣條件發生劇烈變化(如突發雷陣雨,大風等不確定因素)時,對應于歷史數據的大氣條件與當前監測的大氣條件有較大的不同,此時,歷史數據的滯后性會當前監測精度產生較大影響。
真實孔徑雷達是通過礦山工作人員獲取邊坡上某一相對穩定參考區域,通過該穩定參考區域進行大氣參數的校正,其校正過程在1 個掃描周期內即可完成。而且人工指定邊坡穩定參考區域比計算對比獲得參照點更直觀可靠,所以真實孔徑雷達在大氣條件校正方面更加迅速和準確。
對于單次掃描速度合成孔徑雷達一般為3 min,真實孔徑雷達一般為7 min,但是在校正大氣條件后,得到真實可用的邊坡監測數據,則真實孔徑雷達更快。合成孔徑雷達一般需要掃描15 組圖形數據后才能建立氣候條件修正模型,因此實際上得到可用的監測數據需要至少45 min;真實孔徑雷達通過設定某一穩定參考區,在獲取每個像素單元的掃描過程中,實時使用穩定參考區域來進行圖像的校正,因此得到的三維圖形速度更快,數據更加準確可靠。
2.4 監測距離及精度
一般來說,合成孔徑雷達具有更遠的監測距離。目前,合成孔徑雷達最遠的監測距離達到4.5 km,真實孔徑雷達最遠的監測距離為4.0 km,2 種雷達的極限監測距離差距不大。但雷達的實際布設位置與被測邊坡距離較遠時,2 種雷達都會帶來較大的干擾因素,例如大氣條件校正的困難、真實精度的下降、掃描時間的增加、障礙物的影響等。因此,較理想的監測距離是1 km 范圍的邊坡,2 種雷達均能滿足該項技術需求。
合成孔徑和真實孔徑雷達均為亞毫米級測量精度,在實際應用中,由于監測距離遠,雷達波在空氣中的傳播過程受大氣條件的影響,實際精度也無法達到理論上的最大值。另外,雷達波往往不是以垂直方向正對邊坡發射,實際監測位移與真實位移存在三角函數關系,但雷達的真實監測精度一般也都在毫米級,完成可對影響邊坡穩定性的表面位移等數據進行監測,因此2 種雷達的理論精度均能滿足邊坡監測工程的實際需求。
3 結語
1)通過合成孔徑和真實孔徑雷達掃描工作原理的對比,在雷達布設位置與被測邊坡距離較近的情況下,合成孔徑雷達更難滿足實際監測工程的需要。
2)合成孔徑技術產生的監測單元為二維數據,真實孔徑技術產生的監測單元為三維數據,因而合成孔徑雷達仍須添加外部DTM 三維地形圖進行最終的三維位移圖像顯示,真實孔徑雷達則直接生成實際邊坡的三維位移云圖。
3)合成孔徑雷達通過對比歷史數據進行大氣條件校正,真實孔徑雷達通過人工選擇穩定參考區域進行大氣條件校正,真實孔徑雷達在大氣條件校正方面更加迅速和準確。因此真實孔徑雷達獲取的維圖形速度更快,數據更加準確可靠。
4)由于合成孔徑和真實孔徑雷達極限監測距離差距不大,測量精度都為亞毫米級,因此均能滿足邊坡監測工程的實際需求。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
科學(2022年5期)2022-12-29 09:48:56
家庭影院技術(2021年8期)2021-11-02 07:19:00
空間科學學報(2021年4期)2021-08-30 08:31:18
中國石油石化(2021年10期)2021-07-16 07:31:30
學生天地(2020年18期)2020-08-25 09:29:24
家庭影院技術(2019年1期)2019-01-21 02:25:02
中國篆刻(2017年3期)2017-05-17 06:20:46
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
