短波天線云臺(tái)自適應(yīng)系統(tǒng)研究
2021-12-08 13:30:40李盛
摘要: ?為解決電臺(tái)在遠(yuǎn)距離通信過程中經(jīng)常出現(xiàn)的信號(hào)衰減和噪聲問題,本文通過跨學(xué)科研究法、功能研究法、模擬和信息研究等方法,對(duì)短波天線云臺(tái)自適應(yīng)系統(tǒng)進(jìn)行研究。給出了云臺(tái)自適應(yīng)系統(tǒng)功能組成和原理,并根據(jù)短波通信在使用過程中的功能需要,在PID控制算法的基礎(chǔ)上,將短波自適應(yīng)技術(shù)同云臺(tái)技術(shù)相結(jié)合,形成一套嶄新的短波云臺(tái)自適應(yīng)系統(tǒng)。該云臺(tái)系統(tǒng)可以在跟蹤通聯(lián)信號(hào)的同時(shí),控制云臺(tái)自適應(yīng)系統(tǒng)內(nèi)的功能模塊,伴隨信號(hào)質(zhì)量進(jìn)行隨動(dòng)調(diào)整,以達(dá)到提高信號(hào)質(zhì)量、降低噪聲,提高系統(tǒng)魯棒性和保證信號(hào)穩(wěn)定的目的。通過對(duì)該系統(tǒng)的研究發(fā)現(xiàn),短波天線云臺(tái)自適應(yīng)系統(tǒng),可以有效解決短波天線無法在工作過程中進(jìn)行自適應(yīng)調(diào)整的問題。該系統(tǒng)安裝使用機(jī)動(dòng)靈活,整體具有良好的通用性和適用性。該研究具有較好的應(yīng)用前景。
關(guān)鍵詞: ?短波通信; 自適應(yīng)技術(shù); 云臺(tái); PID控制算法
中圖分類號(hào): TP273+.2; TN822+.3 文獻(xiàn)標(biāo)識(shí)碼: A
短波通信是一種借助電離層反射進(jìn)行傳輸?shù)耐ㄐ欧绞剑?dāng)前在軍事、應(yīng)急救援、交通航運(yùn)、宇航等領(lǐng)域發(fā)揮著重要作用。短波通信素有“天線一寸長(zhǎng),信號(hào)一寸強(qiáng)”的說法,即天線的長(zhǎng)度與通聯(lián)信號(hào)的強(qiáng)度成正比。短波電臺(tái)信號(hào)遠(yuǎn)距離傳輸,要經(jīng)過電離層的多次反彈方能實(shí)現(xiàn)。但信號(hào)在天地回彈段一旦遇到干擾,信號(hào)就會(huì)產(chǎn)生衰減。因此,無線電通信信號(hào)質(zhì)量的好壞,一直是“靠天吃飯”。為提高短波電臺(tái)在通信過程中的實(shí)際抗干擾能力,過去通常是在天線上加裝自適應(yīng)降噪抵消裝置[1],或在系統(tǒng)內(nèi)添加自適應(yīng)控制器實(shí)時(shí)選頻系統(tǒng)[2],借以達(dá)到優(yōu)化通聯(lián)信號(hào)質(zhì)量的目的。上述方法雖然能在一定程度上改善電臺(tái)的信號(hào)質(zhì)量,但當(dāng)電臺(tái)需要對(duì)天線的工作角度進(jìn)行實(shí)時(shí)調(diào)整時(shí),系統(tǒng)功能無法滿足需要。傳統(tǒng)短波電臺(tái)自適應(yīng)技術(shù),本質(zhì)上是一種防止信號(hào)傳輸干擾的被動(dòng)調(diào)節(jié)方法[3],隨著現(xiàn)代通信技術(shù)的發(fā)展,控制系統(tǒng)要求能夠根據(jù)干擾情況自主進(jìn)行主動(dòng)干預(yù)。因此,波束成形技術(shù)應(yīng)運(yùn)而生,波束成形技術(shù)之所以能提升通信質(zhì)量,主要是依托于其多組天線系統(tǒng),通過調(diào)整多組天線系統(tǒng)發(fā)射、接收角度,來達(dá)到保證通信質(zhì)量的目的。但這種調(diào)整方法本身具有一定的局限性,在對(duì)-40°和20°的干擾信號(hào)仿真時(shí),信號(hào)有衰減[4]。因此,為滿足對(duì)信號(hào)質(zhì)量保障的要求,本研究主要對(duì)短波天線云臺(tái)自適應(yīng)系統(tǒng)進(jìn)行研究。通過采用動(dòng)態(tài)主動(dòng)干預(yù)的云臺(tái)天線自適應(yīng)機(jī)電系統(tǒng),對(duì)天線角度進(jìn)行實(shí)時(shí)調(diào)整,與傳統(tǒng)短波通信控制系統(tǒng)相比,可以在通聯(lián)過程中,實(shí)現(xiàn)對(duì)信號(hào)實(shí)時(shí)監(jiān)控和算法解析,然后通過控制系統(tǒng)發(fā)出調(diào)整指令,控制天線云臺(tái)完成水平方位角和俯仰角的參數(shù)修正,使云臺(tái)外裝天線根據(jù)信號(hào)質(zhì)量要求同步進(jìn)行實(shí)時(shí)調(diào)整,達(dá)到改善系統(tǒng)信號(hào)質(zhì)量、提升工作效率、遠(yuǎn)程遙控和提高抗干擾能力的目的。天線云臺(tái)自適應(yīng)系統(tǒng)可以對(duì)信號(hào)干擾實(shí)施主動(dòng)干預(yù),使系統(tǒng)通信質(zhì)量保持相對(duì)穩(wěn)定,使控制系統(tǒng)的魯棒性大幅提高。天線云臺(tái)自適應(yīng)系統(tǒng)整體通用性好,滿足海、陸、空、天等多維空間的使用需求,裝載平臺(tái)形式靈活多樣,可以根據(jù)不同的功能任務(wù)需要,對(duì)自身模塊結(jié)構(gòu)單元按需調(diào)整轉(zhuǎn)換,也可以同視覺單元等其他功能模塊進(jìn)行組合,解決過去短波電臺(tái)系統(tǒng)功能單一,模塊固化,調(diào)整反應(yīng)遲滯的問題。因此,該系統(tǒng)是短波天線自適應(yīng)技術(shù)與云臺(tái)技術(shù)的融合和創(chuàng)新拓展,系統(tǒng)的建構(gòu)符合當(dāng)前機(jī)電產(chǎn)品集成化、模塊化發(fā)展要求,具有極強(qiáng)的應(yīng)用價(jià)值和柔性升級(jí)空間[5]。該研究在未來短波通信領(lǐng)域具有很好的發(fā)展前景和應(yīng)用價(jià)值。
1云臺(tái)自適應(yīng)系統(tǒng)功能機(jī)理
1.1云臺(tái)自適應(yīng)系統(tǒng)功能組成
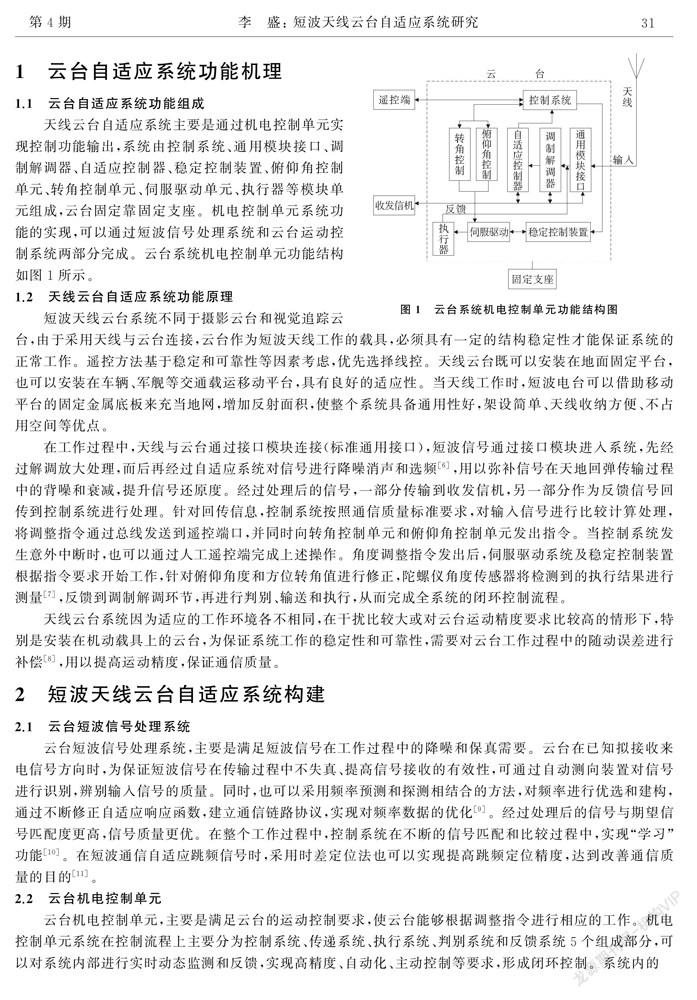
天線云臺(tái)自適應(yīng)系統(tǒng)主要是通過機(jī)電控制單元實(shí)現(xiàn)控制功能輸出,系統(tǒng)由控制系統(tǒng)、通用模塊接口、調(diào)制解調(diào)器、自適應(yīng)控制器、穩(wěn)定控制裝置、俯仰角控制單元、轉(zhuǎn)角控制單元、伺服驅(qū)動(dòng)單元、執(zhí)行器等模塊單元組成,云臺(tái)固定靠固定支座。機(jī)電控制單元系統(tǒng)功能的實(shí)現(xiàn),可以通過短波信號(hào)處理系統(tǒng)和云臺(tái)運(yùn)動(dòng)控制系統(tǒng)兩部分完成。云臺(tái)系統(tǒng)機(jī)電控制單元功能結(jié)構(gòu)如圖1所示。
1.2天線云臺(tái)自適應(yīng)系統(tǒng)功能原理
短波天線云臺(tái)系統(tǒng)不同于攝影云臺(tái)和視覺追蹤云臺(tái),由于采用天線與云臺(tái)連接,云臺(tái)作為短波天線工作的載具,必須具有一定的結(jié)構(gòu)穩(wěn)定性才能保證系統(tǒng)的正常工作。遙控方法基于穩(wěn)定和可靠性等因素考慮,優(yōu)先選擇線控。天線云臺(tái)既可以安裝在地面固定平臺(tái),也可以安裝在車輛、軍艦等交通載運(yùn)移動(dòng)平臺(tái),具有良好的適應(yīng)性。當(dāng)天線工作時(shí),短波電臺(tái)可以借助移動(dòng)平臺(tái)的固定金屬底板來充當(dāng)?shù)鼐W(wǎng),增加反射面積,使整個(gè)系統(tǒng)具備通用性好,架設(shè)簡(jiǎn)單、天線收納方便、不占用空間等優(yōu)點(diǎn)。
在工作過程中,天線與云臺(tái)通過接口模塊連接(標(biāo)準(zhǔn)通用接口),短波信號(hào)通過接口模塊進(jìn)入系統(tǒng),先經(jīng)過解調(diào)放大處理,而后再經(jīng)過自適應(yīng)系統(tǒng)對(duì)信號(hào)進(jìn)行降噪消聲和選頻[6],用以彌補(bǔ)信號(hào)在天地回彈傳輸過程中的背噪和衰減,提升信號(hào)還原度。經(jīng)過處理后的信號(hào),一部分傳輸?shù)绞瞻l(fā)信機(jī),另一部分作為反饋信號(hào)回傳到控制系統(tǒng)進(jìn)行處理。針對(duì)回傳信息,控制系統(tǒng)按照通信質(zhì)量標(biāo)準(zhǔn)要求,對(duì)輸入信號(hào)進(jìn)行比較計(jì)算處理,將調(diào)整指令通過總線發(fā)送到遙控端口,并同時(shí)向轉(zhuǎn)角控制單元和俯仰角控制單元發(fā)出指令。當(dāng)控制系統(tǒng)發(fā)生意外中斷時(shí),也可以通過人工遙控端完成上述操作。角度調(diào)整指令發(fā)出后,伺服驅(qū)動(dòng)系統(tǒng)及穩(wěn)定控制裝置根據(jù)指令要求開始工作,針對(duì)俯仰角度和方位轉(zhuǎn)角值進(jìn)行修正,陀螺儀角度傳感器將檢測(cè)到的執(zhí)行結(jié)果進(jìn)行測(cè)量[7],反饋到調(diào)制解調(diào)環(huán)節(jié),再進(jìn)行判別、輸送和執(zhí)行,從而完成全系統(tǒng)的閉環(huán)控制流程。
天線云臺(tái)系統(tǒng)因?yàn)檫m應(yīng)的工作環(huán)境各不相同,在干擾比較大或?qū)υ婆_(tái)運(yùn)動(dòng)精度要求比較高的情形下,特別是安裝在機(jī)動(dòng)載具上的云臺(tái),為保證系統(tǒng)工作的穩(wěn)定性和可靠性,需要對(duì)云臺(tái)工作過程中的隨動(dòng)誤差進(jìn)行補(bǔ)償[8],用以提高運(yùn)動(dòng)精度,保證通信質(zhì)量。
2短波天線云臺(tái)自適應(yīng)系統(tǒng)構(gòu)建
2.1云臺(tái)短波信號(hào)處理系統(tǒng)
云臺(tái)短波信號(hào)處理系統(tǒng),主要是滿足短波信號(hào)在工作過程中的降噪和保真需要。云臺(tái)在已知擬接收來電信號(hào)方向時(shí),為保證短波信號(hào)在傳輸過程中不失真、提高信號(hào)接收的有效性,可通過自動(dòng)測(cè)向裝置對(duì)信號(hào)進(jìn)行識(shí)別,辨別輸入信號(hào)的質(zhì)量。同時(shí),也可以采用頻率預(yù)測(cè)和探測(cè)相結(jié)合的方法,對(duì)頻率進(jìn)行優(yōu)選和建構(gòu),通過不斷修正自適應(yīng)響應(yīng)函數(shù),建立通信鏈路協(xié)議,實(shí)現(xiàn)對(duì)頻率數(shù)據(jù)的優(yōu)化[9]。經(jīng)過處理后的信號(hào)與期望信號(hào)匹配度更高,信號(hào)質(zhì)量更優(yōu)。在整個(gè)工作過程中,控制系統(tǒng)在不斷的信號(hào)匹配和比較過程中,實(shí)現(xiàn)“學(xué)習(xí)”功能[10]。在短波通信自適應(yīng)跳頻信號(hào)時(shí),采用時(shí)差定位法也可以實(shí)現(xiàn)提高跳頻定位精度,達(dá)到改善通信質(zhì)量的目的[11]。
2.2云臺(tái)機(jī)電控制單元
云臺(tái)機(jī)電控制單元,主要是滿足云臺(tái)的運(yùn)動(dòng)控制要求,使云臺(tái)能夠根據(jù)調(diào)整指令進(jìn)行相應(yīng)的工作。機(jī)電控制單元系統(tǒng)在控制流程上主要分為控制系統(tǒng)、傳遞系統(tǒng)、執(zhí)行系統(tǒng)、判別系統(tǒng)和反饋系統(tǒng)5個(gè)組成部分,可以對(duì)系統(tǒng)內(nèi)部進(jìn)行實(shí)時(shí)動(dòng)態(tài)監(jiān)測(cè)和反饋,實(shí)現(xiàn)高精度、自動(dòng)化、主動(dòng)控制等要求,形成閉環(huán)控制。系統(tǒng)內(nèi)的檢測(cè)和反饋主要是通過陀螺儀角度傳感器,傳感器將接收或反饋的信號(hào)輸送到相關(guān)控制單元,自適應(yīng)控制器再對(duì)反饋信號(hào)進(jìn)行比較處理,將判別結(jié)果分別輸送到執(zhí)行終端或控制中端。輸送到控制中端的信號(hào),控制系統(tǒng)使用差分進(jìn)化算法對(duì)其進(jìn)行計(jì)算分析[12],然后控制轉(zhuǎn)角和俯仰角控制模塊進(jìn)行伴隨調(diào)整、驅(qū)動(dòng)和穩(wěn)定控制裝置驅(qū)動(dòng)執(zhí)行器進(jìn)行響應(yīng),保證系統(tǒng)能夠快速、準(zhǔn)確的完成控制任務(wù)和要求。為保證云臺(tái)與天線、收發(fā)信機(jī)之間能夠進(jìn)行信息互通,系統(tǒng)內(nèi)預(yù)置多個(gè)信息接口。云臺(tái)系統(tǒng)外部采用金屬外殼,內(nèi)部采用框架式結(jié)構(gòu),云臺(tái)內(nèi)各模塊之間使用總線連接,外部保護(hù)罩具有防塵、防雨、防止系統(tǒng)銹蝕等功能。云臺(tái)自適應(yīng)系統(tǒng)工作流程如圖2所示。
天線云臺(tái)機(jī)電控制單元是整個(gè)系統(tǒng)軟件控制的核心,控制單元可以根據(jù)收發(fā)信號(hào)的質(zhì)量,控制云臺(tái)天線進(jìn)行俯仰角度和方位轉(zhuǎn)角雙向調(diào)節(jié)、自我修正,使通聯(lián)過程中的信號(hào)質(zhì)量保持相對(duì)穩(wěn)定和可靠。
2.3云臺(tái)定位控制方法
云臺(tái)若滿足自適應(yīng)工作需求,首先要滿足對(duì)自我定位的要求,要確認(rèn)當(dāng)前云臺(tái)所處的坐標(biāo),根據(jù)云臺(tái)工作環(huán)境,有多種方式可供選擇。如果是在室外,可以通過全球定位系統(tǒng)(global positioning system, GPS)或者借助通信基站來實(shí)現(xiàn);如果在室內(nèi),則可以通過超寬帶定位技術(shù)(global positioning system/ultra wide band, GPS/UWB)無縫定位技術(shù)來實(shí)現(xiàn)[13]。GPS天地通聯(lián)精度高,但是容易受到地理地貌影響,精度主要是GPS服務(wù)商提供的服務(wù)和開放精度等級(jí)來決定。而采用移動(dòng)通訊基站,精度則依托于基站信號(hào)覆蓋范圍,在邊遠(yuǎn)地區(qū)信號(hào)覆蓋面相對(duì)較弱,但調(diào)整成本與GPS相比要低很多。在城市及其周邊地區(qū),移動(dòng)基站的信號(hào)覆蓋率相對(duì)較高,性價(jià)比十分突出,況且經(jīng)過國(guó)家多年的通訊基礎(chǔ)設(shè)施建設(shè),我國(guó)通訊信號(hào)的覆蓋率已經(jīng)基本實(shí)現(xiàn)全面覆蓋。如果在室內(nèi),GPS/UWB無疑是最好的選擇,可以借助網(wǎng)絡(luò)信號(hào)實(shí)現(xiàn)無縫覆蓋,定位精度可以達(dá)到厘米級(jí)。現(xiàn)有的定位技術(shù)可以根據(jù)現(xiàn)場(chǎng)情況進(jìn)行任意切換,有利于提高系統(tǒng)的可靠性和定位精度。在云臺(tái)使用過程中,當(dāng)云臺(tái)方位坐標(biāo)確認(rèn)以后,坐標(biāo)信息回輸?shù)娇刂葡到y(tǒng)后,依托系統(tǒng)內(nèi)數(shù)字羅盤來校正偏差,通過俯仰角和轉(zhuǎn)角控制裝置,實(shí)現(xiàn)云臺(tái)的自我角度修正和對(duì)短波信號(hào)的實(shí)施追蹤[14]。
3云臺(tái)自適應(yīng)系統(tǒng)控制實(shí)現(xiàn)
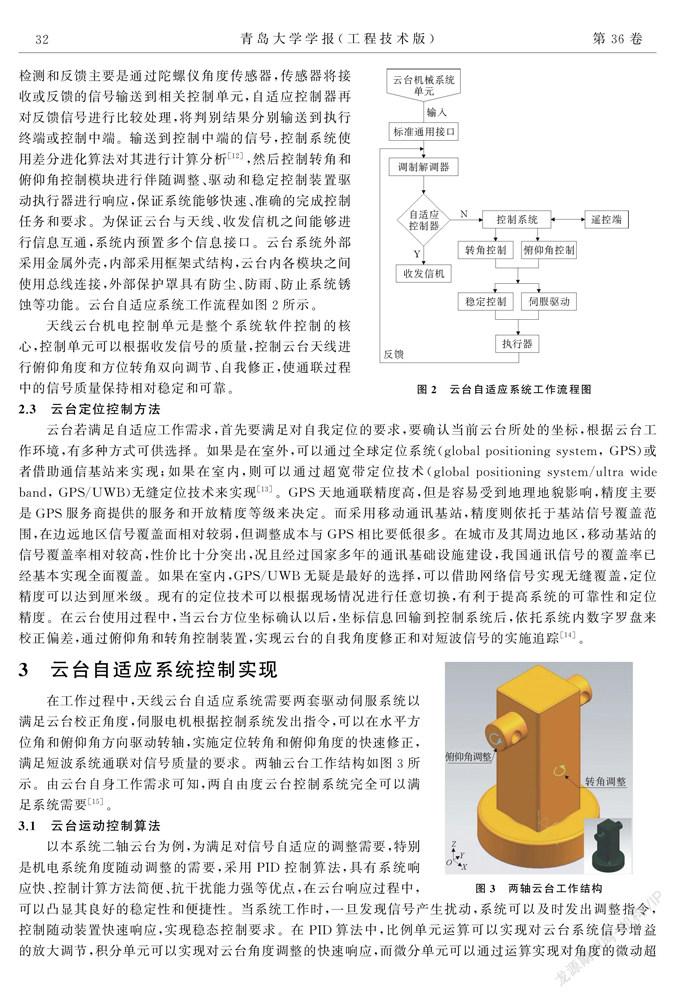
在工作過程中,天線云臺(tái)自適應(yīng)系統(tǒng)需要兩套驅(qū)動(dòng)伺服系統(tǒng)以滿足云臺(tái)校正角度,伺服電機(jī)根據(jù)控制系統(tǒng)發(fā)出指令,可以在水平方位角和俯仰角方向驅(qū)動(dòng)轉(zhuǎn)軸,實(shí)施定位轉(zhuǎn)角和俯仰角度的快速修正,滿足短波系統(tǒng)通聯(lián)對(duì)信號(hào)質(zhì)量的要求。兩軸云臺(tái)工作結(jié)構(gòu)如圖3所示。由云臺(tái)自身工作需求可知,兩自由度云臺(tái)控制系統(tǒng)完全可以滿足系統(tǒng)需要[15]。
3.1云臺(tái)運(yùn)動(dòng)控制算法
以本系統(tǒng)二軸云臺(tái)為例,為滿足對(duì)信號(hào)自適應(yīng)的調(diào)整需要,特別是機(jī)電系統(tǒng)角度隨動(dòng)調(diào)整的需要,采用PID控制算法,具有系統(tǒng)響應(yīng)快、控制計(jì)算方法簡(jiǎn)便、抗干擾能力強(qiáng)等優(yōu)點(diǎn),在云臺(tái)響應(yīng)過程中,可以凸顯其良好的穩(wěn)定性和便捷性。當(dāng)系統(tǒng)工作時(shí),一旦發(fā)現(xiàn)信號(hào)產(chǎn)生擾動(dòng),系統(tǒng)可以及時(shí)發(fā)出調(diào)整指令,控制隨動(dòng)裝置快速響應(yīng),實(shí)現(xiàn)穩(wěn)態(tài)控制要求。在PID算法中,比例單元運(yùn)算可以實(shí)現(xiàn)對(duì)云臺(tái)系統(tǒng)信號(hào)增益的放大調(diào)節(jié),積分單元可以實(shí)現(xiàn)對(duì)云臺(tái)角度調(diào)整的快速響應(yīng),而微分單元可以通過運(yùn)算實(shí)現(xiàn)對(duì)角度的微動(dòng)超調(diào)。將運(yùn)算結(jié)果經(jīng)過比較后,傳輸給受控對(duì)象執(zhí)行。但在工作過程中,僅靠單一運(yùn)算環(huán)節(jié)難以實(shí)現(xiàn)動(dòng)態(tài)系統(tǒng)的穩(wěn)態(tài)控制,而采用串聯(lián)校正方法可以解決單一環(huán)節(jié)穩(wěn)態(tài)控制難以兼顧的問題,使系統(tǒng)在工作中能夠保證整體的動(dòng)態(tài)穩(wěn)定性。借助PID控制器實(shí)現(xiàn)對(duì)定位轉(zhuǎn)角和俯仰角度的控制,PID控制系統(tǒng)結(jié)構(gòu)如圖4所示。為提高控制精度和抗干擾能力,也可以采用模糊PID復(fù)合算法控制的方法[16],使系統(tǒng)在工作過程中既能保證動(dòng)態(tài)穩(wěn)定性和快速響應(yīng),又能將比較環(huán)節(jié)引起的信號(hào)噪音和擾動(dòng)控制在合理范圍內(nèi),形成最佳匹配結(jié)果。
為提高控制精度,在天線云臺(tái)的控制過程中可以采用復(fù)合控制算法——模糊PID控制算法,即模糊智能控制與PID算法相結(jié)合的方法,在進(jìn)行系統(tǒng)誤差修正時(shí),可以提高系統(tǒng)的穩(wěn)態(tài)和精度[17]。但在具體穩(wěn)態(tài)控制環(huán)節(jié),還需要先對(duì)PID理想狀態(tài)公式進(jìn)行參數(shù)離散化處理,將其化為差分方程后,方能求出結(jié)果[18]。建立在PID算法基礎(chǔ)上的控制方法,是最簡(jiǎn)便高效的控制手段,在實(shí)際操作過程中可靠性更高、穩(wěn)定性更好,也便于技術(shù)實(shí)現(xiàn)。
3.2云臺(tái)控制系統(tǒng)硬件實(shí)現(xiàn)
1)為滿足云臺(tái)天線系統(tǒng)的自適應(yīng)調(diào)整要求,特別是為保證安裝在移動(dòng)平臺(tái)上的云臺(tái)系統(tǒng)穩(wěn)定性需要,為提高其對(duì)角速度的檢測(cè)和控制能力,系統(tǒng)中配有微機(jī)電系統(tǒng)(microelectro mechanical systems, MEMS)陀螺儀傳感器。通過陀螺儀傳感器擬合平動(dòng)或轉(zhuǎn)動(dòng)響應(yīng)曲線,可以提高控制穩(wěn)定精度和定位精度,又可以使系統(tǒng)集成化、小型化[19]。
2)要滿足系統(tǒng)方位轉(zhuǎn)角和俯仰角的調(diào)整需要,系統(tǒng)需要有驅(qū)動(dòng)伺服電機(jī)進(jìn)行工作,保證轉(zhuǎn)軸和底盤在轉(zhuǎn)動(dòng)過程中快速、有效。目前的主要?jiǎng)恿υO(shè)備是使用直流步進(jìn)電機(jī)作為驅(qū)動(dòng),電機(jī)在控制系統(tǒng)的指令下,實(shí)現(xiàn)實(shí)時(shí)微調(diào),滿足通信的需要。
3)控制系統(tǒng)主要使用單片機(jī)或開發(fā)板,如STM32系列[20]或MINI2440開發(fā)板[21]。控制系統(tǒng)具有一定的邏輯運(yùn)算能力。當(dāng)有關(guān)信息反饋到控制系統(tǒng)后,系統(tǒng)對(duì)輸入?yún)?shù)經(jīng)過比較處理發(fā)出控制指令,驅(qū)動(dòng)傳遞系統(tǒng)和執(zhí)行器進(jìn)行工作。因?yàn)椴捎脝纹瑱C(jī)、開發(fā)板或可編程控制器(programmable logic controller, PLC),使控制系統(tǒng)具備自我修正和主動(dòng)干預(yù)的能力。
4)執(zhí)行機(jī)構(gòu)是系統(tǒng)運(yùn)動(dòng)的末端機(jī)構(gòu),能通過控制系統(tǒng)發(fā)出的指令進(jìn)行快速響應(yīng)并完成調(diào)整動(dòng)作,使云臺(tái)天線在短時(shí)間內(nèi)獲得最佳的發(fā)射和接收角度,保證電臺(tái)在工作過程中獲得最佳的通聯(lián)質(zhì)量。
4結(jié)束語(yǔ)
短波通信技術(shù)伴隨當(dāng)前的科技發(fā)展,在控制手段和控制方法上不斷演進(jìn)。新的控制理論對(duì)傳統(tǒng)的控制方法又是一種豐富和強(qiáng)化,從跳頻、選頻到云臺(tái)天線自適應(yīng)系統(tǒng)的運(yùn)用,都是在原有技術(shù)理論的基礎(chǔ)上進(jìn)行的復(fù)合化拓展和創(chuàng)新,新的控制算法使系統(tǒng)控制響應(yīng)更快、準(zhǔn)確度更高。模糊PID復(fù)合算法的出現(xiàn)和使用,使云臺(tái)系統(tǒng)的定位精度提高到一個(gè)新的量級(jí)。天線云臺(tái)系統(tǒng)是對(duì)改善短波通信質(zhì)量的一種嘗試,該系統(tǒng)的學(xué)科屬性本質(zhì)上屬于交叉邊緣學(xué)科,未來可以結(jié)合更新的技術(shù),在工作中自主判斷、自主處理。最主要的是天線云臺(tái)系統(tǒng)的通用性強(qiáng)、實(shí)現(xiàn)方便,可以根據(jù)不同任務(wù)需要搭載不同的載具,控制靈活、自動(dòng)化程度化高,可以滿足閉環(huán)控制要求。今后通過對(duì)天線云臺(tái)系統(tǒng)的深入研究,不但可使短波電臺(tái)信號(hào)通聯(lián)質(zhì)量更好,而且可以提高控制系統(tǒng)響應(yīng)速度和控制系統(tǒng)整體性價(jià)比,為未來短波通信新技術(shù)的繼續(xù)深化研究奠定基礎(chǔ)。
參考文獻(xiàn):
[1]楊小龍, 毛轉(zhuǎn)蘭. 自適應(yīng)天線系統(tǒng)在通訊抗干擾中的作用[J]. 武警技術(shù)學(xué)院學(xué)報(bào), 1995(3): 2326.
[2]方敏, 沈平林, 沈琪琪. 從普通的短波電臺(tái)到高頻自適應(yīng)通信系統(tǒng)[J]. 軍事通信技術(shù), 1995, 53: 1821.
[3]郭銳. “短波自適應(yīng)選頻”的研究[D]. 西安: 西北工業(yè)大學(xué), 2006.
[4]周可籍. 基于自適應(yīng)天線實(shí)現(xiàn)信號(hào)的方向性篩選[J]. 信息通信, 2016(9): 9496.
[5]顧新建, 楊青海, 紀(jì)楊建, 等. 機(jī)電產(chǎn)品模塊化設(shè)計(jì)方法與案例[M]. 北京: 機(jī)械工業(yè)出版社, 2014.
[6]羅小武, 劉勤讓. 窄波束全向接收的自適應(yīng)天線陣研究[J]. 電波科學(xué)學(xué)報(bào), 2003, 18(1): 100102, 115.
[7]張義, 李東輝. 基于陀螺儀轉(zhuǎn)角傳感器的動(dòng)態(tài)信號(hào)測(cè)量及轉(zhuǎn)向控制[J]. 無線互聯(lián)科技, 2021, 3(5): 100101.
[8]孟士超, 徐茂俊, 羅巍, 等. 靜電陀螺儀隨動(dòng)系統(tǒng)誤差的補(bǔ)償[J]. 中國(guó)慣性技術(shù)學(xué)報(bào), 2011, 19(4): 383386.
[9]徐池, 邱楚楚. 短波通信頻率自優(yōu)化技術(shù)分析研究[J]. 通信技術(shù), 2020, 53(4): 848853.
[10]劉羅仁, 羅金玲, 廖柳青. 定向天線自動(dòng)跟蹤控制系統(tǒng)的研究[J]. 太原師范學(xué)院學(xué)報(bào): 自然科學(xué)版, 2009, 8(2): 6567, 92.
[11]孫沙沙, 王鵬. 自適應(yīng)短波通信系統(tǒng)跳頻信號(hào)時(shí)差定位方法[J]. 計(jì)算機(jī)仿真, 2021, 38(1): 162166.
[12]劉振澤, 許洋, 王峰明. 改進(jìn)差分進(jìn)化算法在非線性模型預(yù)測(cè)控制的應(yīng)用[J]. 北京工業(yè)大學(xué)學(xué)報(bào), 2015, 41(5): 680685.
[13]連小勇, 王茂森, 戴勁松. 基于GPS/UWB技術(shù)的無縫定位平臺(tái)設(shè)計(jì)[J]. 兵器裝備工程學(xué)報(bào), 2021, 42(4): 203207.
[14]趙炯, 謝正東, 周奇才, 等. 二自由度云臺(tái)控制系統(tǒng)設(shè)計(jì)及控制方法的研究[J]. 機(jī)械工程與自動(dòng)化, 2020(6): 2124.
[15]高子龍, 張林梅, 劉麗龍, 等. 模糊PID復(fù)合控制在某武器裝備隨動(dòng)系統(tǒng)負(fù)載模擬器中的應(yīng)用研究[J]. 微電機(jī), 2021, 54(5): 110114.
[16]陳帥, 汪成文, 張震陽(yáng), 等. 改進(jìn)模糊PID方法及其在電液伺服控制中的應(yīng)用[J]. 機(jī)電工程, 2021, 38(5): 559565.
[17]胡壽松. 自動(dòng)控制原理[M]. 5版. 北京: 科學(xué)出版社, 2007.
[18]賴義漢, 龍忠華, 劉子鑠, 等. 基于STM32的云臺(tái)穩(wěn)定器設(shè)計(jì)[J]. 綏化學(xué)院學(xué)報(bào), 2020, 40(5): 149153.
[19]周云, 曾雅麗思, 趙瑜, 等. 基于陀螺儀轉(zhuǎn)角傳感器的動(dòng)態(tài)信號(hào)測(cè)量及物理參數(shù)時(shí)域識(shí)別[J]. 湖南大學(xué)學(xué)報(bào): 自然科學(xué)版, 2020, 47(9): 1022.
[20]陳燕坤. 基于雙輸入雙輸出系統(tǒng)辨識(shí)的二自由度伺服云臺(tái)系統(tǒng)控制設(shè)計(jì)[D]. 廣州: 華南理工大學(xué), 2020.
[21]陳毅維. 步進(jìn)云臺(tái)自適應(yīng)穩(wěn)姿控制研究[D]. 西安: 西安工業(yè)大學(xué), 2019.
作者簡(jiǎn)介: ?李盛(1975),男,學(xué)士,講師,主要研究方向?yàn)闄C(jī)電交通。 Email: Ls301@126.com
Research on the Adaptive System of Shortwave Antenna PTZ
LI Sheng
(Sichuan Institute of Industrial Technology, Deyang 618500, China)
Abstract: ?In order to solve the signal attenuation and noise problems that often occur in the radio station in the process of longdistance communication, this paper uses interdisciplinary research methods, functional research methods, simulation and information research methods to study the shortwave antenna pantilt adaptive system. The functional composition and principle of the PTZ adaptive system are given. According to the functional needs of shortwave communication in the use process, based on the PID control algorithm, the shortwave adaptive technology and the PTZ technology are combined to form a new set of technologies, say, the shortwave pantilt adaptive system. The pan/tilt system can control the functional modules in the pan/tilt adaptive system while tracking the communication signal, and adjust the signal quality accordingly, so as to improve signal quality, reduce noise, improve system robustness and ensure signal stability. Through the research of the system, it is found that the shortwave antenna pan/tilt adaptive system can effectively solve the problem that the shortwave antenna cannot be adaptively adjusted during the working process. The system is flexible in installation and use, and has good versatility and applicability as a whole. This research has good application prospects.
Key words: shortwave communication; adaptive technology; PTZ; PID control algorithm