某虛擬主銷懸架車型低速轉(zhuǎn)向性能分析與優(yōu)化
2021-12-11 09:21:34景立新馮博李飛吳利廣
汽車實(shí)用技術(shù) 2021年22期
景立新,馮博,李飛,吳利廣
某虛擬主銷懸架車型低速轉(zhuǎn)向性能分析與優(yōu)化
景立新1,2,馮博1,李飛1,2,吳利廣1,2
(1.中國汽車技術(shù)研究中心有限公司,天津 300300;2.中汽研汽車檢驗(yàn)中心(天津)有限公司,天津 300300)
某改款車型設(shè)計(jì)開發(fā)過程中發(fā)現(xiàn)低速轉(zhuǎn)向工況存在倒吸現(xiàn)象、低速極限轉(zhuǎn)向位置無法回正等問題,通過理論分析轉(zhuǎn)向力矩影響因素,利用動力學(xué)分析方法得出問題產(chǎn)生的主要原因?yàn)樵撎摂M主銷懸架轉(zhuǎn)向過程中ackerman誤差大、主銷后傾拖距變化率大及采用的輪胎側(cè)偏剛度大。結(jié)合懸架及轉(zhuǎn)向系統(tǒng)布置,提出了優(yōu)化設(shè)計(jì)方案,通過仿真分析,驗(yàn)證了優(yōu)化方案的可行性,為車輛設(shè)計(jì)、調(diào)校提供了理論依據(jù)。
低速轉(zhuǎn)向;回正;ackerman
前言
車輛的轉(zhuǎn)向特性包括高速轉(zhuǎn)向特性及低速轉(zhuǎn)向特性,其中低速轉(zhuǎn)向特性包括轉(zhuǎn)彎半徑、低速轉(zhuǎn)向力、低速回正等。
正常情況下,理想狀態(tài)下車輛有較小的轉(zhuǎn)彎半徑,保證車輛具有較好機(jī)動能力;低速轉(zhuǎn)向過程中方向盤力矩隨方向盤轉(zhuǎn)角的增大而增大,駕駛員有較好的轉(zhuǎn)向反饋;低速轉(zhuǎn)向時(shí),方向盤釋放后車輛能回到直線行駛能力,減輕駕駛員的駕駛負(fù)擔(dān)[1-2]。
最小轉(zhuǎn)彎半徑主要取決于軸距、輪距及內(nèi)外輪最大轉(zhuǎn)角,其中內(nèi)輪最大轉(zhuǎn)角一般由底盤空間限制確定,而外輪最大轉(zhuǎn)角由內(nèi)輪最大轉(zhuǎn)角及轉(zhuǎn)向幾何確定,平行轉(zhuǎn)向?qū)?yīng)的轉(zhuǎn)彎半徑最小,理想阿克曼(內(nèi)外車輪指向同一圓心)時(shí)轉(zhuǎn)彎半徑較大[3]。
低速轉(zhuǎn)向回正力矩主要來源于主銷內(nèi)傾角產(chǎn)生的抬升效應(yīng),利用重力回正使車輪回復(fù)到中間位置/直線行駛狀態(tài)。主銷內(nèi)傾角越大,方向力矩越大,同時(shí)由于轉(zhuǎn)向幾何的非線性,在大轉(zhuǎn)角時(shí)轉(zhuǎn)向節(jié)力臂長度變小,對應(yīng)的轉(zhuǎn)向力矩會非線性增大。
某改款車型在設(shè)計(jì)開發(fā)過程中發(fā)現(xiàn)低速轉(zhuǎn)向性能不理想,主要體現(xiàn)為低速轉(zhuǎn)向時(shí)存在倒吸現(xiàn)象及低速極限轉(zhuǎn)向位置無法回正。
1 問題描述
該車型為一改款車型,前懸架為雙叉臂懸架,其中下叉臂由前后擺臂組成,每個(gè)擺臂與轉(zhuǎn)向節(jié)以球鉸連接(非真實(shí)主銷結(jié)構(gòu),主銷為虛擬軸線),由于布置原因轉(zhuǎn)向器由前置調(diào)整為后置,改款車型懸架硬點(diǎn)不變,重新布置優(yōu)化轉(zhuǎn)向系統(tǒng)硬點(diǎn),如圖1所示。
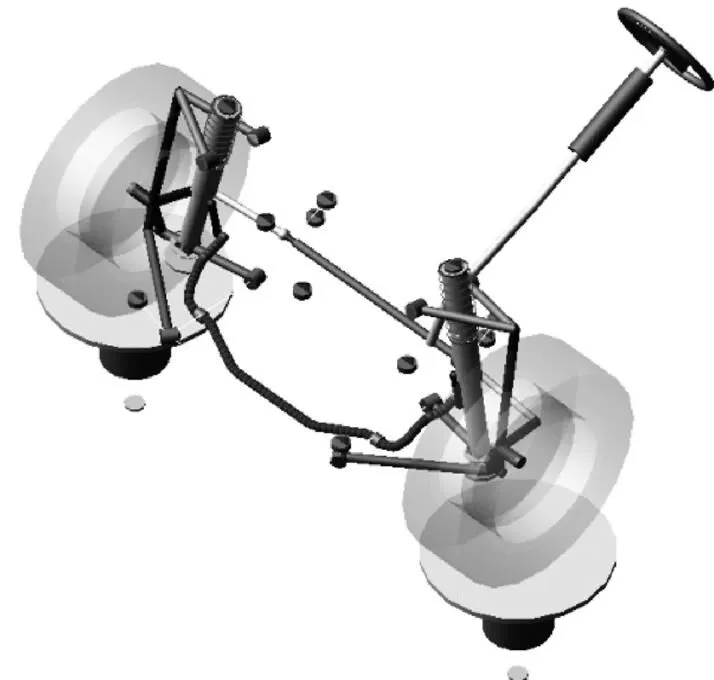
圖1 雙球鉸雙叉臂前懸架模型
進(jìn)行低速轉(zhuǎn)向工況分析,車速設(shè)置為10 km/h,關(guān)閉轉(zhuǎn)向助力,方向盤從中間位置緩慢勻速轉(zhuǎn)到左極限,之后反向轉(zhuǎn)到右極限,再轉(zhuǎn)到左極限,最終回到中間位置,仿真結(jié)果見圖2所示。
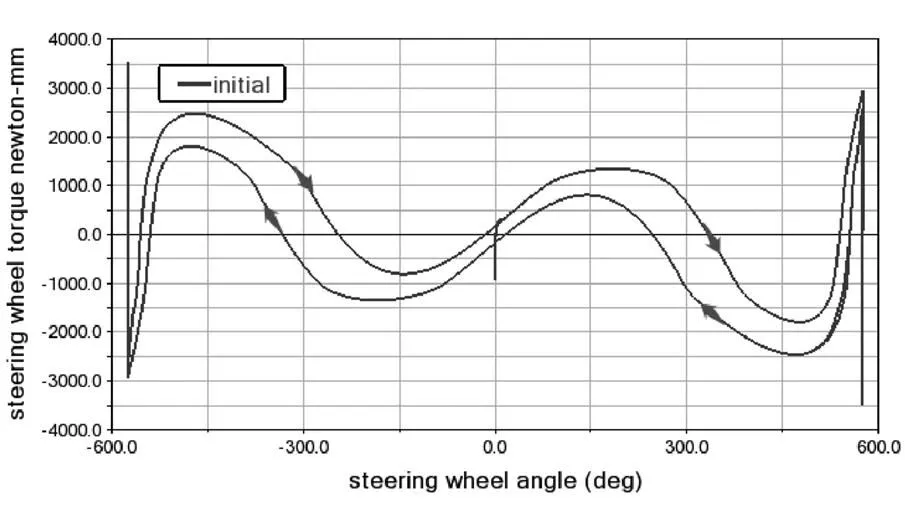
圖2 低速轉(zhuǎn)向工況方向盤力矩與轉(zhuǎn)角關(guān)系
由仿真結(jié)果可以看出,方向盤轉(zhuǎn)角較小時(shí),方向盤力矩隨轉(zhuǎn)角逐漸增大;方向盤轉(zhuǎn)角達(dá)到250 deg時(shí),方向盤力矩開始減小,在大于350 deg時(shí)方向盤力矩與轉(zhuǎn)角方向相反,出現(xiàn)倒吸現(xiàn)象。
進(jìn)行低速回正工況分析,車速設(shè)置為10 km/h,關(guān)閉轉(zhuǎn)向助力,方向盤從極限位置釋放(方向盤力矩為0 Nm)。仿真結(jié)果顯示,方向盤釋放后車輛沒有回到直線行駛狀態(tài),方向盤始終保持在極限位置。
2 原因分析
上述兩個(gè)工況均具有低速、大轉(zhuǎn)角特點(diǎn),表現(xiàn)為車輛自身的回正力矩偏小甚至為負(fù)值。
車輛的回正力矩主要由三部分組成:
=T?T+T(1)
其中T為重力回正力矩,T為摩擦力矩,T為輪胎產(chǎn)生的回正力矩。
當(dāng)T?T+T≤0時(shí),車輛將無法回正或自轉(zhuǎn)向。
車輛在低速大轉(zhuǎn)角轉(zhuǎn)向時(shí),如內(nèi)外輪轉(zhuǎn)角偏離理想的ackerman轉(zhuǎn)向,則意味著車輪平面與車輪軌跡不重合[4],輪胎有一定的側(cè)偏角及側(cè)向力[5],如圖3所示。
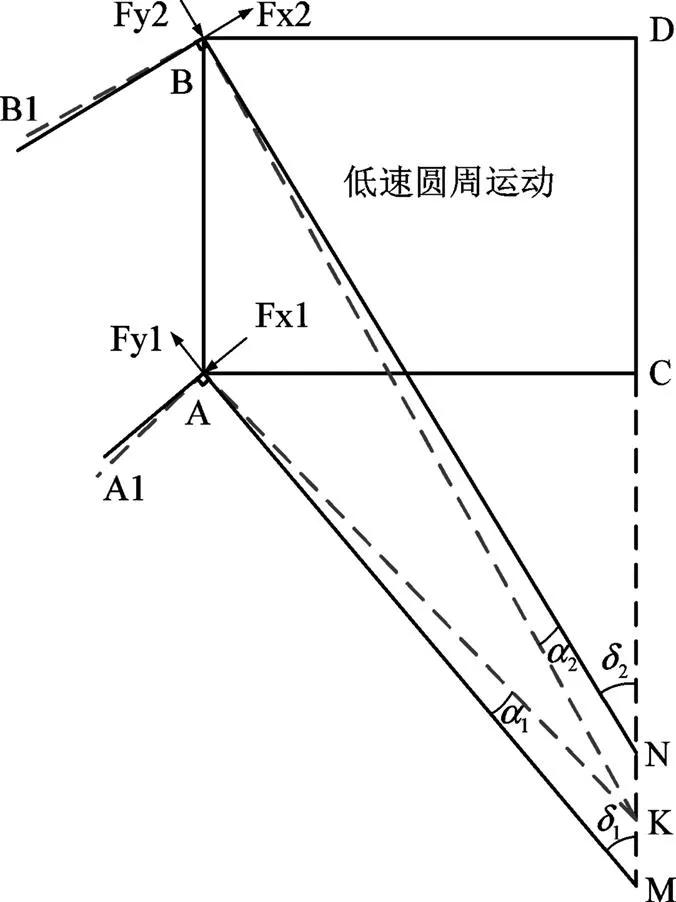
圖3 汽車低速圓周運(yùn)動輪胎力示意圖
低速轉(zhuǎn)向時(shí),整車的側(cè)向加速度較小,左右輪胎側(cè)向力合力為零,即側(cè)向力大小相等但方向相反,且均指向內(nèi)側(cè)[6]。
輪胎側(cè)向力的大小取決于側(cè)偏剛度與側(cè)偏角,其中側(cè)偏角的大小與實(shí)際外輪轉(zhuǎn)角相對理想外輪轉(zhuǎn)角差相關(guān),實(shí)際外輪轉(zhuǎn)角與理想外輪轉(zhuǎn)角越接近(轉(zhuǎn)向阿克曼越高),側(cè)偏角越小,側(cè)向力也就越小。
在轉(zhuǎn)向過程中主銷后傾拖距也不斷變化,內(nèi)側(cè)車輪后傾拖距逐漸增大,與向內(nèi)的側(cè)向力一起產(chǎn)生一個(gè)使車輪向內(nèi)轉(zhuǎn)向的力矩;外側(cè)車輪后傾拖距逐漸減小,與向內(nèi)的側(cè)向力一起產(chǎn)生一個(gè)使車輪向外轉(zhuǎn)向的力矩(當(dāng)后傾拖距為負(fù)時(shí),產(chǎn)生使車輪向內(nèi)轉(zhuǎn)向力矩)。
由輪胎產(chǎn)生的回正力矩為:
T=|*|* (2?1) (2)
其中:為輪胎側(cè)偏剛度;為側(cè)輪胎側(cè)偏角;1、2為內(nèi)外側(cè)主銷后傾拖距。
而該車型存在以下明顯特征:
2.1 主銷后傾拖距變化大
相對于傳統(tǒng)的雙叉臂懸架,該車型下擺臂由前后兩個(gè)擺臂組成,擺臂與轉(zhuǎn)向節(jié)球鉸連接,兩個(gè)擺臂的軸線交點(diǎn)即為主銷軸線下點(diǎn)(簡稱為主銷下點(diǎn)),由于該交點(diǎn)并非真實(shí)硬點(diǎn),故該懸架主銷為虛擬軸線[7]。
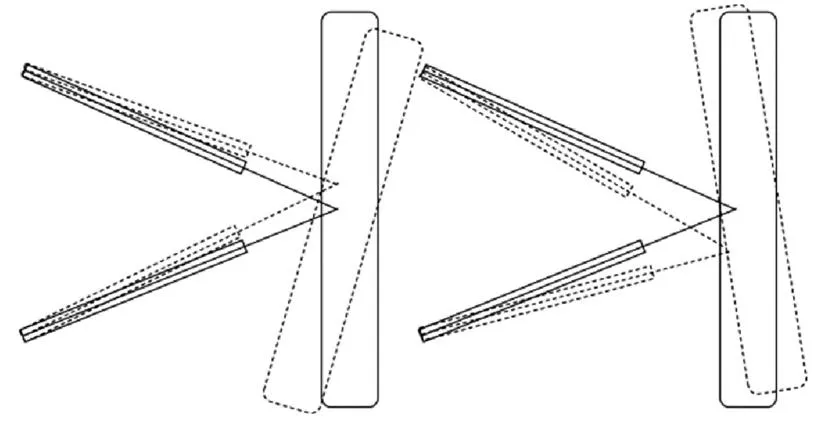
圖4 前懸架前后下擺臂雙球鉸結(jié)構(gòu)示意圖
在轉(zhuǎn)向過程中,兩個(gè)擺臂軸線的交點(diǎn)縱向位置隨轉(zhuǎn)向角度變化,以右側(cè)懸架為例,當(dāng)右轉(zhuǎn)時(shí),輪胎接地點(diǎn)向后移動,而主銷下點(diǎn)前移,對應(yīng)的主銷后傾角及后傾拖距將明顯增大;而當(dāng)左轉(zhuǎn)時(shí),輪胎接地點(diǎn)前移,主銷下點(diǎn)后移,對應(yīng)的主銷后傾角及后傾拖距將明顯減小;由于主銷下點(diǎn)的移動,該類懸架轉(zhuǎn)向時(shí)主銷后傾拖距的變化顯著大于麥弗遜及傳統(tǒng)雙叉臂式具有真實(shí)主銷的懸架。
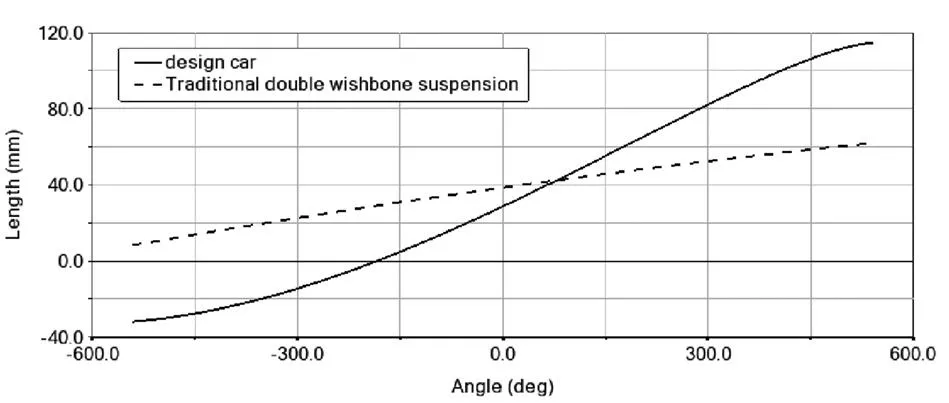
圖5 主銷后傾拖距對比
2.2 輪胎側(cè)偏角大
低速轉(zhuǎn)向時(shí),內(nèi)輪轉(zhuǎn)角steerin對應(yīng)的理想外輪轉(zhuǎn)角steerout為:
steerout=atan(/(/tan(steerin)+)) (3)
其中為軸距,為輪距。
轉(zhuǎn)向過程中,實(shí)際外輪轉(zhuǎn)角與理想外輪轉(zhuǎn)角并不一致,其差值將決定低速轉(zhuǎn)向時(shí)的輪胎側(cè)偏角的大小。
該車型在轉(zhuǎn)向極限位置的實(shí)際外輪轉(zhuǎn)角與理想外輪轉(zhuǎn)角差為2.9 deg,較正常值偏大,考慮到使用的275/45R20型號輪胎,側(cè)偏剛度大,因此需要減小該差值。
對于轉(zhuǎn)向器后置懸架,內(nèi)移轉(zhuǎn)向拉桿外點(diǎn)能提高轉(zhuǎn)向阿克曼,減小低速轉(zhuǎn)向時(shí)的輪胎側(cè)偏角。然而,轉(zhuǎn)向系統(tǒng)優(yōu)化時(shí)還要考慮另外一個(gè)重要參數(shù)toggle angle,其定義為在垂直于主銷軸線的平面內(nèi),由轉(zhuǎn)向拉桿內(nèi)點(diǎn)投影1、外點(diǎn)投影2及主銷與平面交點(diǎn)0形成的夾角,見圖6,過大、過小的toggle angle將容易導(dǎo)致轉(zhuǎn)向卡死現(xiàn)象。
以右轉(zhuǎn)向過程為例,兩個(gè)擺臂球鉸位置前移拉動轉(zhuǎn)向拉桿外點(diǎn)也隨之前移,與主銷下點(diǎn)前移及外移共同引起Toggle angle相對具有真實(shí)主銷的懸架明顯增大,如圖7所示。
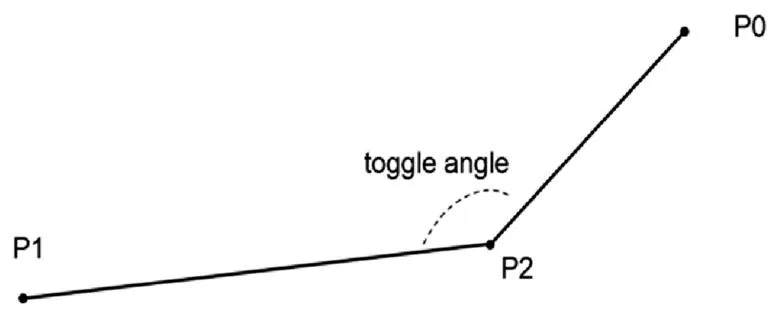
圖6 toggle angle 示意圖
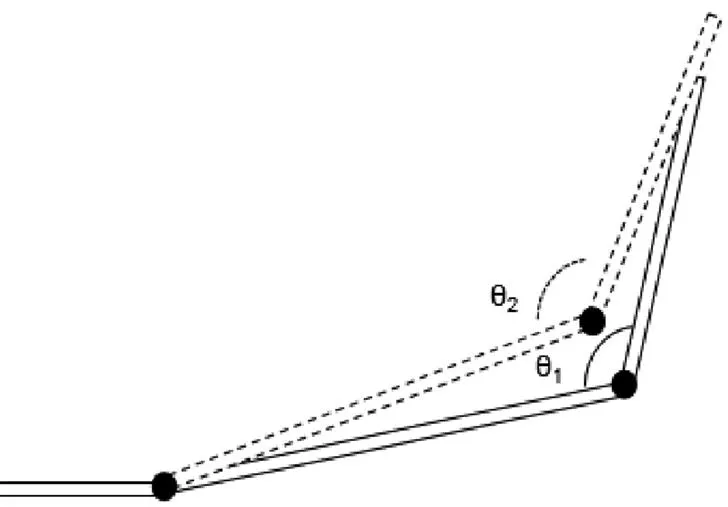
圖7 雙叉臂(下擺臂雙球鉸)懸架toggle angle
為了避免toggle angle過大,設(shè)計(jì)時(shí)需將轉(zhuǎn)向拉桿外點(diǎn)外移,但這將導(dǎo)致轉(zhuǎn)向阿克曼的降低,在優(yōu)化時(shí)需要綜合平衡。
3 優(yōu)化方案
為解決該車型出現(xiàn)的低速轉(zhuǎn)向倒吸及無法回正問題,可以通過增大主銷內(nèi)傾角、減小主銷后傾拖距變化、減小輪胎側(cè)偏剛度及減小輪胎側(cè)偏角等方式實(shí)現(xiàn)。其中主銷內(nèi)傾角及主銷后傾拖距變化主要由懸架系統(tǒng)決定,優(yōu)化所需的周期及成較高;輪胎側(cè)偏角由轉(zhuǎn)向幾何決定,可通過調(diào)整轉(zhuǎn)向拉桿外點(diǎn)優(yōu)化,同時(shí)也可通過調(diào)整初始前束角的方式來調(diào)整;減小輪胎側(cè)偏剛度可采取更換小尺寸輪胎的方式實(shí)現(xiàn)。
3.1 調(diào)整轉(zhuǎn)向拉桿外點(diǎn)
當(dāng)轉(zhuǎn)向拉桿外點(diǎn)內(nèi)移時(shí),轉(zhuǎn)向阿克曼提升,但toggle angle角度增大,利用多體動力學(xué)仿真獲得具體對應(yīng)關(guān)系見表1。
表1 轉(zhuǎn)向參數(shù)對比
參數(shù)外移5 mm外移2.5 mm初始位置內(nèi)移2.5mm內(nèi)移5mm @內(nèi)輪20度阿克曼百分比23.5429.1734.8040.3745.94 內(nèi)輪最大轉(zhuǎn)角37.3037.3037.3037.3037.30 外輪最大轉(zhuǎn)角32.4131.7731.1330.5529.97 理想外輪轉(zhuǎn)角28.2428.2428.2428.2428.24 側(cè)偏角2.091.771.451.160.87 極限toggleangle159.00160.31161.62162.495163.37
綜合考慮toggle angle和阿克曼后采用轉(zhuǎn)向拉桿外點(diǎn)內(nèi)移2.5 mm方案。
3.2 調(diào)整初始前束角
原車采用的初始前束角為正值,如改為零或負(fù)值則在轉(zhuǎn)向過程中相同內(nèi)輪轉(zhuǎn)角對應(yīng)的實(shí)際外輪轉(zhuǎn)角減小,更接近理想外輪轉(zhuǎn)角,輪胎產(chǎn)生的側(cè)偏角減小,降低輪胎產(chǎn)生的自轉(zhuǎn)向力矩。
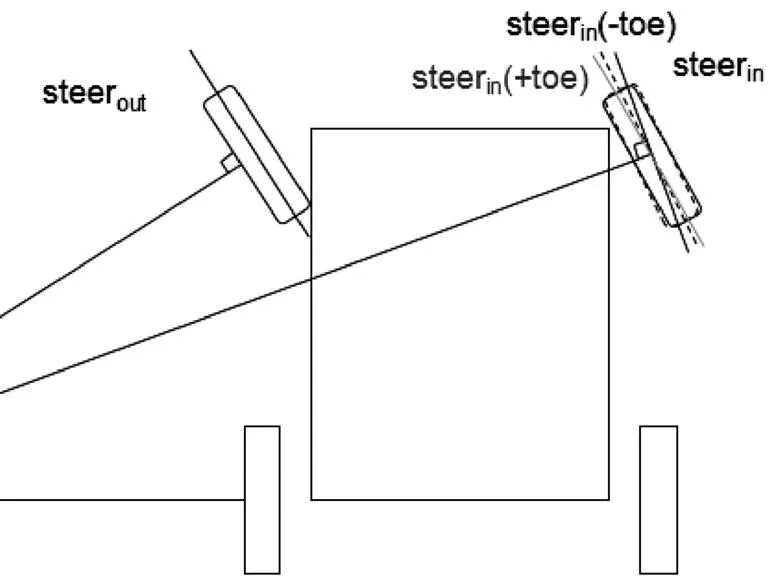
圖8 初始前束角對實(shí)際外輪轉(zhuǎn)角影響
一般正前束有利于提高車輛的穩(wěn)定性,負(fù)前束有利于車輛的轉(zhuǎn)向靈敏性,綜合考慮后將總前束角由正0.1 deg調(diào)整為0前束。
3.3 降低輪胎側(cè)偏剛度
輪胎側(cè)偏角不是很大時(shí),相同側(cè)偏角對應(yīng)的輪胎回正力矩與輪胎側(cè)偏剛度成正比。輪胎側(cè)偏剛度大往往有利提高車輛的操穩(wěn)特性,但可能會導(dǎo)致低速轉(zhuǎn)向時(shí)有較大的自轉(zhuǎn)向力矩,降低車輛低速轉(zhuǎn)向回正力矩及回正能力,因此針對該車問題,選用側(cè)偏剛度稍小的輪胎可改善整車的低速轉(zhuǎn)向性能。
將輪胎型號由275/45R20調(diào)整為255/50R20,輪胎半徑增大3.75 mm,側(cè)偏剛度下降20%左右。
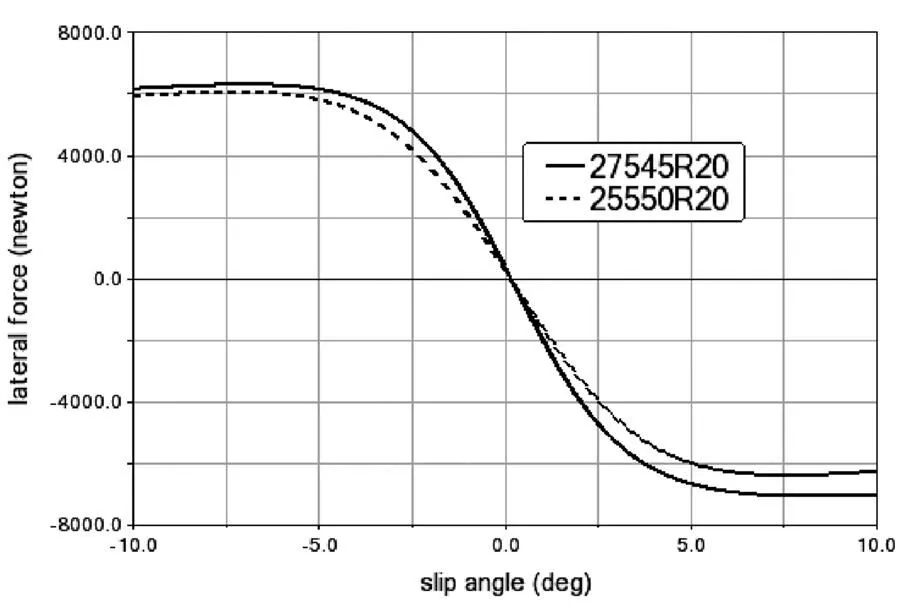
圖9 兩種輪胎型號側(cè)偏特性對比
3.4 效果驗(yàn)證
針對以上優(yōu)化方案進(jìn)行整車仿真驗(yàn)證,試驗(yàn)工況包括低速轉(zhuǎn)向工況及低速極限位置回正工況,仿真結(jié)果見圖10及圖11。
由仿真結(jié)果可以看出,單獨(dú)減小前束角對中小角度轉(zhuǎn)向時(shí)方向盤回正力矩改善明顯,對大角度轉(zhuǎn)向時(shí)方向盤回正力矩影響較小,減小前束角對低速極限位置回正改善不明顯;單獨(dú)內(nèi)移轉(zhuǎn)向拉桿外點(diǎn)可改善低速方向盤力矩,極限位置回正工況方向盤最終能回正,但回正時(shí)間較長;減小輪胎側(cè)偏剛度對改善方向盤回正力矩影響稍大,極限位置回正工況回正時(shí)間減小;同時(shí)采用三種方案時(shí)方向盤回正力矩改善最顯著,極限回正工況回正時(shí)間明顯減小。
由于調(diào)整幅度受限,方向盤回正力矩暫無法達(dá)到隨方向盤轉(zhuǎn)角增大,且回程中也保持一定回正力矩的理想狀態(tài),考慮到EPS具備主動回正功能,因此可在后期實(shí)車匹配階段進(jìn)一步調(diào)整優(yōu)化。
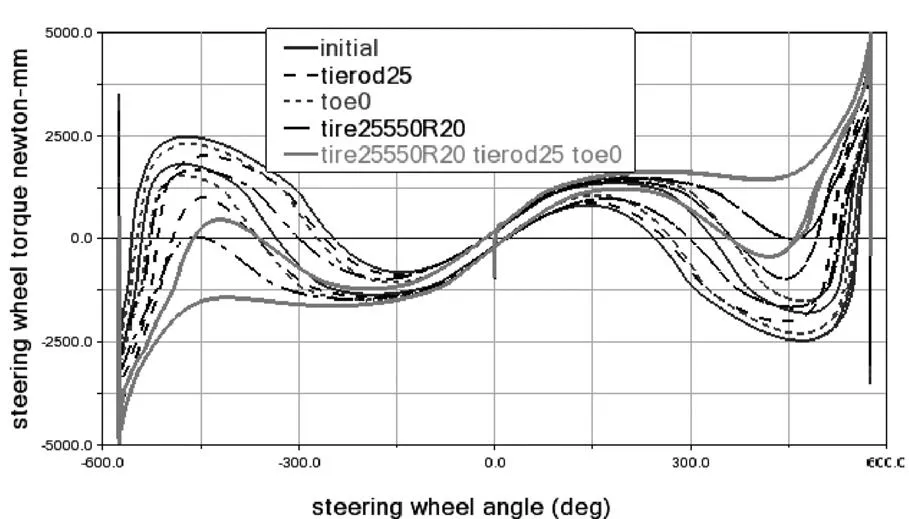
圖10 低速轉(zhuǎn)向工況不同優(yōu)化方案對方向力矩影響
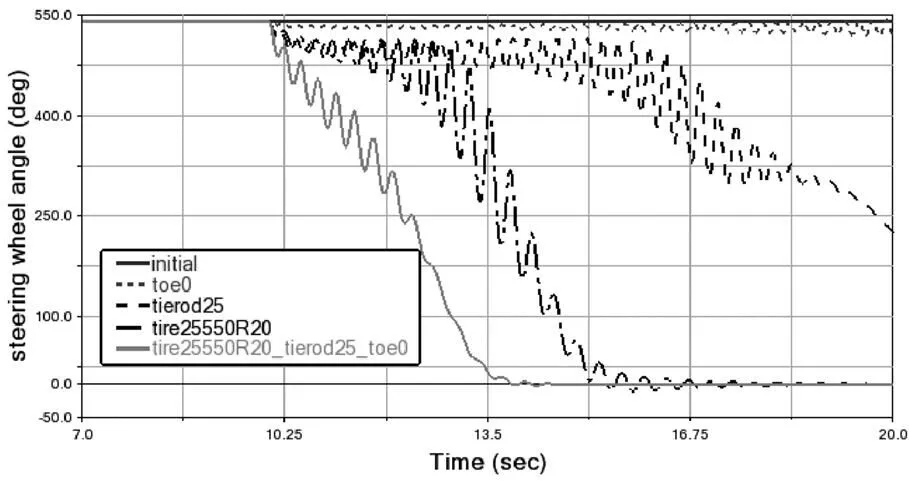
圖11 低速回正工況不同優(yōu)化方案對方向角度影響
4 結(jié)論
本文系統(tǒng)性的分析了影響車輛低速轉(zhuǎn)向時(shí)方向盤回正力矩的影響因素,結(jié)合實(shí)際限制條件對輪胎側(cè)偏剛度、轉(zhuǎn)向阿克曼進(jìn)行了優(yōu)化,仿真結(jié)果驗(yàn)證了優(yōu)化方案的可行性,為解決低速轉(zhuǎn)向問題提供了理論依據(jù)。
[1] 郭孔輝.汽車操縱動力學(xué)[M].長春:吉林科學(xué)技術(shù)社,1991.
[2] 蔡章林.懸架系統(tǒng)K&C特性綜述[J].上海汽車,2009(8):12-22.
[3] 趙六齊.車輛動力學(xué)基礎(chǔ)[M].北京:清華大學(xué)出版社,2006.
[4] 劉惟信.汽車設(shè)計(jì)[M].北京:清華大學(xué)出版社,2001:609-610.
[5] 包志超.低速轉(zhuǎn)向時(shí)轉(zhuǎn)向梯形對回正力矩和路感效應(yīng)的影響——關(guān)于阿克曼轉(zhuǎn)向梯形與轉(zhuǎn)向平形四邊形的研究報(bào)告[J].世界汽車,1980(3):29-34.
[6] 景立新,吳利廣,李飛,等.某車型轉(zhuǎn)向回正性能問題改進(jìn)[J].汽車科技,2014(3):30-33.
[7] 金凌鴿.C級車懸架KnC特性優(yōu)化設(shè)計(jì)方法研究[D].長春:吉林大學(xué),2010.
Analysis and Optimization of Low Speed Steering Performance of a Virtual Kingpin Suspension Vehicle
JING Lixin1,2, FENG Bo1, LI Fei1,2, WU Liguang1,2
(1.China Automobile Technology & Research Center Co., Ltd., Tianjin 300300;2.CATARC Automotive Test Center (Tianjin) Co., Ltd., Tianjin 300300)
In the process of design and development of a vehicle, it is found that there are some problems in the low-speed steering condition,such as self-turning phenomenon and can't return at low speed and ultimate turning position.Through the theoretical analysis of the influence factors of the steering torque, the main causes of the problem are the large ackerman error of the virtual kingpin suspension, the large change rate of mechanical trail and the large tire cornering stiffness.According to the layout of suspension and steering system, the optimization design scheme is put forward, and the feasibility of the optimization scheme is verified through simulation analysis, which provides a theoretical basis for vehicle design and tuning.
Low-speed steering; Return; Ackerman
A
1671-7988(2021)22-92-04
U463.33
A
1671-7988(2021)22-92-04
CLC NO.: U463.33
景立新,高級工程師,博士,就職于中國汽車技術(shù)研究中心有限公司,研究方向:底盤開發(fā),主持多款車型底盤開發(fā)及性能調(diào)校。
10.16638/j.cnki.1671-7988.2021.022.024