反饋系統工程設計實驗教學探索
2021-12-14 07:16:36盧潔瑩蘇為洲黃觀欽李錦輝
實驗室研究與探索 2021年10期
盧潔瑩,蘇為洲,黃觀欽,李錦輝
(華南理工大學自動化科學與工程學院,廣州 510641)
0 引言
2020 年初,國家提出“加快推進國家規劃已明確的重大工程和基礎設施建設,加快5G 網絡、數據中心等新型基礎設施建設進度”(即“新基建”)的重大戰略安排,區別于傳統基礎建設,“新基建”更加注重工程化、智能化的要求。自動化技術是現代智能制造、工程化領域最重要的技術之一,對于加快傳統產業改造升級、企業走向高質量發展提供數字轉型、智能升級、融合創新等起到了重要的推動作用。目前“新基建”核心技術人才需求量擴大,不斷加強人才培養,為新產業發展輸送人才成為了當務之急[1]。
高校教育對于人才培養具有先導性作用,新時代教育改革是現代化國家建設大局中重要的一環。因此高校要主動調整人才培養模式,及時適應社會和產業對人才的需求,尤其是要重視工程應用型人才的培養,建立以實際工程能力培養為導向的課程體系和教學模式,充分體現社會發展對人才提出的專業知識需求[2-3]。
為了在實際的課堂教學中積極響應國家對專業人才需求的號召,完成優秀工程人才培養的目標,我院開設的反饋系統工程設計以反饋系統在工程中應用的發展作為背景,結合當下國家發展對工程人才的需求,為學生構建工程中典型反饋系統的知識體系,訓練學生具備扎實的工程技術基礎。同時課程的實驗部分,將從實際科研項目以及校企合作的工程問題中提煉出的典型實例轉化為若干個實驗項目,讓學生在實驗課程的學習和完成過程中,掌握典型工業系統中的反饋控制系統設計與實現方法[4]。
1 反饋系統工程設計課程內容
為了更好地培養學生的實際工程能力以及對知識的綜合運用能力,近兩年我院面向自動化專業高年級學生開設了面向工程應用的專業課程——反饋系統工程設計,該課程分為理論部分和實驗部分。課程內容融合了信號與系統、自動控制原理、現代控制理論、計算機控制和運動控制等先修課程中的知識以及工程實例,系統地介紹了在工程中行之有效的系統辨識、分析和反饋控制的設計方法以及計算機控制系統的硬件架構和軟件實現要點。課程內容大致分為如圖1 所示的4 個模塊。

圖1 反饋系統工程設計課程內容架構
課程采用從簡單到復雜的反饋系統學習體系,逐步啟發學生思考反饋控制系統在工程應用中的特點,進而理解設計性能理想的控制系統所需的理論、實驗與驗證方法。為了讓課程更好地與實際工程接軌,在實驗部分的教學過程中,將傳統的反饋控制知識轉化為若干個實驗項目,學生圍繞這些從科研項目及合作企業的工程問題中提煉出的反饋控制系統建模與設計實驗項目來完成基于實際數據的反饋系統建模、分析、設計和實現。通過實驗課程的學習和操作,學生將會完整地了解工程中反饋控制系統設計過程,掌握工程中常見的反饋控制器設計方法以及基于嵌入式系統實現方法,并初步具備面向典型工業系統進行反饋控制系統設計與調試的能力。
2 反饋系統工程設計實驗教學與科研項目相結合
實驗教學是學生將理論知識與實踐相結合的重要橋梁,也是培養學生工程素養、創新實踐能力的關鍵手段。實驗室是學生知識創新和工程能力培養的重要基地[5-7]。目前,學生在不同的理論課程中學習了各種知識,但對于這些知識背后蘊含的實際工程應用價值卻缺乏認識。現有的實驗課程內容僅針對某些理論知識點的驗證,而且實驗設備和所采用的技術手段相對老舊,導致學生很難通過實驗課程將所學的知識綜合地聯系起來,也不懂得如何運用到實際工程案例中去。傳統的本科生實驗室功能相對單一,主要是提供給本科生進行某幾門課程的實驗,沒有發揮出實驗室在人才培養方面的優勢。相比之下,科研實驗室擁有許多先進精密儀器設備,孕育了許多前沿的技術,但本科生很少有機會接觸到這些設備和技術,使得科研實驗室的資源未能充分利用和挖掘,造成不能滿足學生自主學習和開展科研探索的需求[8-11]。針對這種情況,在反饋系統工程設計實驗課程中,以培養學生工程素養和創新能力為目標,結合實際科研項目中的典型實例,設立了有利于培養學生理論聯系實際,充分蘊含實際工程意義的實驗教學項目。與此同時,科學有序地開放科研實驗室,讓更多的優秀本科生進入科研實驗室學習和研究,讓前沿的技術、優質的設備、最新的科研成果轉化為本科實驗教學的得力助手。因此在面向工程能力的實驗教學中,要注重以下幾個方面:
(1)實驗教學內容應與實際工程應用緊密聯系。傳統的實驗教學在內容上比較陳舊,理論聯系實際不密切,與實際工程應用有所脫節。反饋系統工程設計實驗課程內容是來源于我院網絡控制與多智能體團隊近10 年來主持的多項國家自然科學基金重點項目和面上項目以及與多家工業控制行業的龍頭企業所合作項目中提煉出來的反饋系統建模、控制器設計等問題。因此,學生能真正從實驗項目中接觸到實際工程問題,并充分運用所學知識來解決這些問題,從而提高他們的分析設計問題能力、創新能力等。
(2)加強實驗結果的理論分析能力培養。目前的實驗教學中驗證性實驗占大多數,學生根據測量數據或者曲線等直接得出結論,對于實驗結果的分析相對較為缺乏。為了提升學生的綜合能力和工程能力,反饋系統工程設計實驗課程內容以探索性為主,要求學生自己根據實際系統中的采樣、建模、控制器設計等問題提出想法并設計實驗,然后根據理論課所學知識去分析實驗結果,對于實驗中所遇到的問題學會用理論知識去找出原因并通過對不同情況的實驗結果進行對比從而得出結論。提高學生學習的主動性,真正懂得如何用理論知識去分析和解決問題,撬開科學研究的大門。
(3)科研實驗室資源開放共享。高校實驗室是人才培養和科技創新的孵化器。科研實驗室不僅擁有高新技術、先進儀器設備而且實驗室教師、研究生團隊有著豐富的理論和工程經驗積累[5]。反饋系統工程設計實驗課程教學場所就在科研實驗室,學生可以在實驗課程中接觸到實際科研項目的新技術新方法,拓寬他們的視野。在實驗課程之外的時間,建立科研實驗室開放共享的運行機制,為學有余力的本科生提供展開科學研究的場地和資源。同時還有老師和研究生師兄師姐們為他們提供相應的指導,為培養學生工程能力、創新能力提供堅實的保障。
3 反饋系統工程設計實驗
3.1 實驗平臺
在反饋系統工程設計實驗教學中,結合實際工程項目與課程理論教學內容,設計了一個二自由度激光瞄準伺服云臺,實驗平臺如圖2 所示。該系統是自主搭建的集數據采集、系統辨識、控制器設計及驗證的平臺。該平臺結構如圖3 所示,由二自由度云臺、激光瞄準感應器、靶面、旋轉臺擾動源和上位機組成。擾動源通過對二自由度云臺產生速度或者位置擾動來模擬載體在運動過程中的振動,然后用激光瞄準感應器在靶面上的位置信息來判斷所設計的控制器對擾動抑制能力的強弱。上位機軟件下發指令給伺服云臺,伺服云臺接收到上位機軟件的指令完成相應的任務,并返回數據給上位機進行系統辨識及控制器設計、驗證等,二者共同作用使伺服云臺達到激光精準定位的效果。

圖2 二自由度激光瞄準伺服云臺
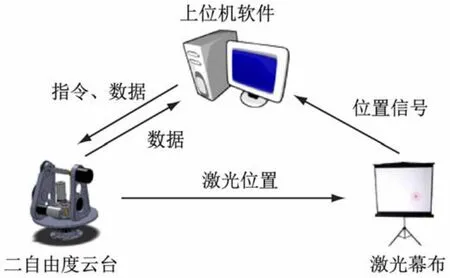
圖3 二自由度激光瞄準伺服云臺結構
上位機軟件界面如圖4 所示,主要包括系統配置、系統辨識、控制設計和運動測試4 個功能。系統配置主要是選擇伺服云臺的軸向(方位軸和俯仰軸)以及傳感器;系統辨識部分可以設計辨識輸入信號,然后分析系統階次、建立模型,以及給出模型和原系統頻域和時域響應的對比圖等。控制設計部分可以根據系統開環Bode 圖來設計PID 控制器、LQR(Linear quadratic requlator)最優控制器,并根據開環Bode 圖來分析所得閉環系統的動態品質,進而進行頻域的開環特性驗證和時域的閉環仿真驗證。最后運動測試部分,把控制器參數下載到實時控制算法中,對閉環系統的品質進行實時驗證,同時與基于開環Bode圖的性能分析結果進行對比和分析,強化學生對開環Bode圖與閉環性能關系的理解。

圖4 伺服系統上位機軟件界面
3.2 實驗內容
本實驗主要分為系統辨識與模型驗證以及控制器設計與驗證兩個部分。
(1)系統辨識與模型驗證實驗。這部分實驗首先將二自由度激光瞄準伺服云臺底層軟硬件部分搭建好,然后在上位機軟件上進行系統配置,選擇好方位軸或者俯仰軸以及相應的傳感器,然后針對速度環進行建模,其基本結構見圖5。

圖5 系統辨識結構圖
采用的辨識方法是理論課所講授的基于偽隨機響應的MarKov-Hankel辨識方法。學生可以在上位機軟件上設計偽隨機信號的幅值和級數生成偽隨機信號,并輸入給伺服云臺系統產生輸出信號。根據系統輸入輸出數據,由公式

求取自相關系數Ruu和互相關系數Ryu。然后根據公式

求取自相關譜密度函數Suu和互相關譜密度函數Syu。接下來由Syu(e-jωk)/Suu(e-jωk)得到系統的幅頻特性和相頻特性。由公式

可見,還可以根據自相關系數和互相關系數得到系統脈沖響應。然后根據脈沖響應可以得到Hankel矩陣

繼而通對Hankel矩陣進行奇異值分解得到系統階次及模型。
上位機軟件根據上述MarKov-Hankel 辨識方法確定系統階次和模型,同時還可以給出模型與實際系統的時域響應對比和頻率特性對比以及模型零極點圖,以便讓學生從不同角度運用理論課程所學知識來分析所建模型的有效性。
為了讓學生對系統辨識信號的選取、系統階次選擇以及基于偽隨機信號的辨識算法有更深入的理解和認識,要求他們要選取多組不同幅值、不同級數的偽隨機信號,并通過時域響應和頻率特性對比來分析幅值和級數對辨識的影響。
圖6~8 所示為一學生在上位機軟件上完成的伺服系統速度環辨識實驗的Hankel 矩陣奇異值分布圖以及時域響應和頻率特性對比圖。

圖6 Hankel矩陣奇異值分布圖

圖7 時域響應對比圖

圖8 頻率特性對比圖
從圖6 可見,在第4 個奇異值后,其余奇異值發生迅速衰減,因此可以判斷系統階次為3階。從圖7、8中可見,藍色線條為實際系統的響應曲線,紅色為模型的響應曲線。從圖中可以直觀地看出所建模型與原系統的時域和頻域響應具有較好的擬合度。
為了更準確地分析所建模型的有效性,上位機軟件對模型與實驗數據的時域響應及頻率特性給出了兩個定量的評估指標——相關系數及均方根誤差。選擇N個時間點或頻點的值記為X1,X2,…,XN,記實驗數據這些點上的取值為A(X1),A(X2),…,A(XN),同時實際系統模型在這些點上的取值為^A(X1),^A(X2),…,^A(XN)。模型與實際系統數據的相關系數為:
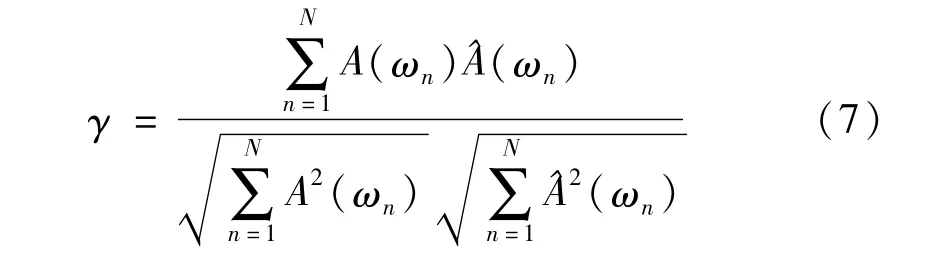
該相關系數反映了模型與實際系統數據的擬合程度,當兩者完全一致時,γ=1。兩者相相關性系數越接近1,則模型與實際系統的擬合程度越高。均方根誤差指的是N個時間點或頻點中,模型與實際系統數據之差的平方和與N的比值開根號:

均方根誤差越小,模型與實際系統的擬合程度越高。
從圖7、8 中的數據可見,模型與實際系統時域和頻域響應的相關系數分別為0.985 和0.976,均方根誤差分別為3.41deg 和1.438 dB。由此可見,辨識模型較為精確地刻畫了實際系統的特性。最終實驗軟件辨識得到的系統模型為:

(2)控制器設計與驗證實驗。該部分實驗內容為針對伺服云臺系統的速度環這一對象,設計控制器使得激光瞄準伺服云臺能夠進行精準定位,系統框圖如圖9 所示。

圖9 伺服云臺系統速度環框圖
在實驗中,讓學生設計兩類控制器,第一類是PI+PD串聯控制器。控制器傳遞函數為:

區別于傳統的經驗整定法或者單純通過觀察時域響應曲線進行整定的方法,采用的方法是通過系統開環頻率特性及具體指標去整定參數,這樣的優點在于能夠定量去分析控制器的性能,使得PID 控制器參數設計更加精確,避免學生出現盲目調節參數的現象。實驗整體步驟是,首先將PD環節置1(即Kp2=1,Kd=0),整定PI環節的參數,以消除穩態誤差,提高控制精度。由于PI環節會帶來相位滯后,減小穩定裕量,因此之后要加入PD參數,來提高系統穩定裕量,加快系統響應速度。最后整定好PI +PD 參數后,系統開環Bode圖如圖10 所示。
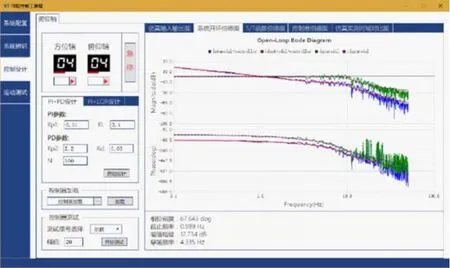
圖10 整定PI+PD參數后系統開環Bode圖
不同顏色的線條分別表示不同對象的開環Bode圖:綠色的線條表示實際對象,紫色線條表示所建模型,藍色線條表示實際對象加上PI +PD控制器,紅色線條表示模型加上PI +PD控制器。學生在上位機軟件上觀察系統開環Bode圖以及相應的相位裕度、幅值裕度、截止頻率、穿越頻率數值來分析閉環系統性能。相位裕度和幅值裕度都表明了系統的穩定性,相位裕度越大,則超調量越小,系統的穩定性越好,截止頻率和穿越頻率則表征了系統的快速性。通過對這些指標的定性分析以及對開環Bode 圖的觀察可以得到閉環系統的性能。
學生還可以根據系統開環Bode 圖有針對性地調整控制器參數,使控制器符合提出的性能指標。最后為了驗證控制器性能,給閉環系統輸入一個階躍信號,觀察系統輸出響應情況。如圖11 所示,藍色線條為實驗1 所建模型的響應曲線,紅色線條為實際系統的響應曲線。可以看出仿真與實際系統的階躍響應輸出大致相同,實際系統在穩態時出現毛刺現象是由于電動機上的電流擾動產生。

圖11 PI+PD系統階躍響應輸出
從上位機軟件的開環Bode 圖數據以及時域響應數據可以對比PI控制器和PI 串聯PD 控制器這兩者給系統性能帶來的差異(見表1)。

表1 PI與PI+PD系統性能指標對比
由表1 可見,在PI 基礎上串聯PD 后,系統的超調量明顯減小,幅值裕度、相位裕度明顯增加,系統穩定性得到明顯改善。系統的調節時間、截止頻率也有所增加,因此系統的快速性也得到一定提高。學生可以用多組PID參數的數據進行實驗和仿真,可以得出不同參數下控制器及系統的性能,從而更深層次地了解PID控制器的原理和作用。
另一類要設計的控制器為PI +LQR 控制器,LQR即線性二次型調節器,是狀態反饋設計的常用方法。由于純狀態反饋不能消除穩態誤差,因此還要加入積分器部分。其結構如圖12 所示。
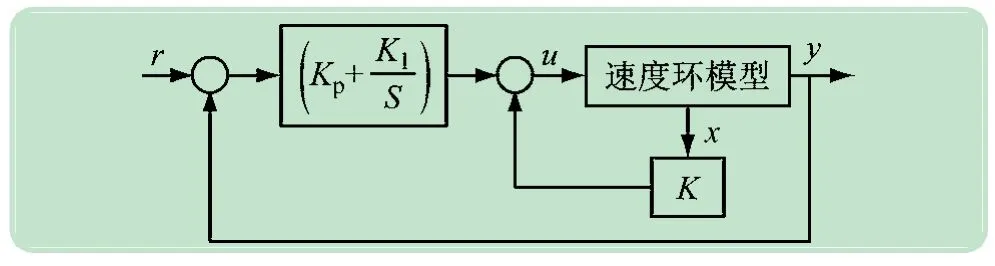
圖12 PI+LQR控制系統結構圖
系統的狀態方程為:

設置目標輸出為:

式中,ρ為柔性補償系數。設計的性能指標函數為:

式中:Q=ρ2CTC;R=1;N=0。學生首先根據開環系統開環Bode 圖設計柔性補償系數ρ,使得內環系統穩定,然后設計PI參數,使得系統穩定無靜差,且相位滯后盡量小。學生設計好PI+LQR參數后,同樣在頻域中觀察開環Bode圖以及在時域中用階躍信號進行測試,觀察所設計的控制器性能,如圖13、14 所示。
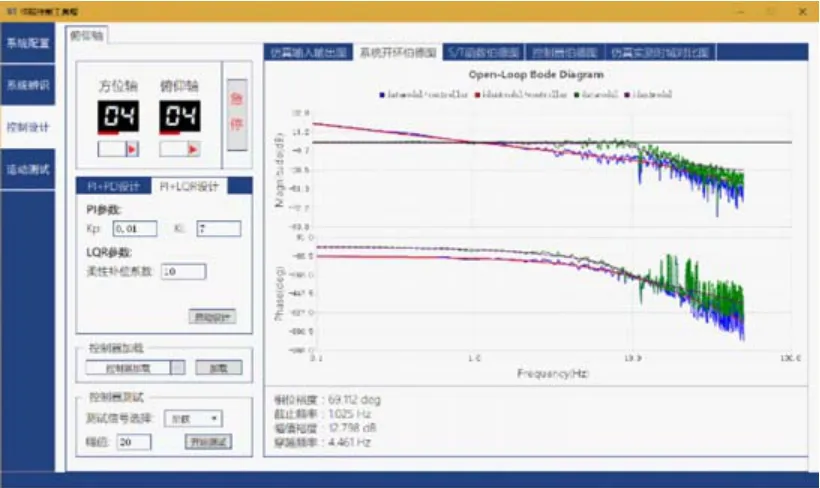
圖13 整定PI+LQR參數后系統開環Bode圖

圖14 PI+LQR系統階躍響應輸出
同樣,為了對比PI 控制器以及PI +LQR 控制器的系統性能差異,在表2 中給出二者的性能指標對比。
由表2可見,加入了LQR控制器后,系統的超調量明顯減小,幅值裕度、相位裕度明顯增加,穩定性得到了提高。學生通過實驗,能加深對PID 控制器的理解,同時對LQR最優控制器的原理、目標函數的選取及設計有了更加直觀深入的認識。

表2 PI與PI+LQR系統性能指標對比
另外,在實驗過程中,要求學生利用Bode 圖對比理論模型與實驗數據模型的差別,從而理解對象不確定性在頻域中的涵義;對比理論開環Bode圖與實驗數據開環Bode圖及性能指標的差異,理解對象不確定性對系統穩定裕量的影響。
通過實驗課程的開展,讓學生將理論課上所學的知識與實際工業控制系統的建模、控制器設計與驗證等問題緊密聯系起來。同時實驗課程注重訓練學生對實驗結果的理論分析能力,對于實驗數據的處理和分析不再以驗證某一理論為目的,而是培養學生在實際系統中發現問題、分析問題和解決問題的能力。因此實驗報告也具有一定的開放性,不以某一實驗結果作為評判標準,而重在學生在實驗過程中綜合能力以及運用理論知識分析實驗結果這一能力的體現。不僅如此,實驗課程讓學生真正有機會到科研實驗室進行學習和研究,接觸更加貼近工業應用的先進設備和技術。對于學有余力的同學,將實驗室的優質資源開放共享給他們,讓他們在這里激發出更多的靈感,探索出更多的科研新思路、新方法和新技術。
4 結語
為了響應國家發展對于工程應用專業人才的要求,在實驗課程中實現對學生工程素養、創新能力的培養,在反饋系統工程設計實驗課程中融入從科研項目及合作企業的工程問題中提煉出的反饋控制系統建模與設計問題,讓學生通過實驗課程掌握典型工業控制系統的實現方法,學會用所學知識去分析問題和解決實際的工程問題,從而提升他們的工程能力。同時科研實驗室的開放共享為培育創新人才提供了一個重要的平臺,為國家發展提供優秀人才儲備。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
太空探索(2016年6期)2016-07-10 12:09:06
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43