基于K60 單片機(jī)的無人車編隊(duì)匯入控制與管理系統(tǒng)
2021-12-17 00:56:50李子博孫寧
智能計(jì)算機(jī)與應(yīng)用 2021年6期
李子博,孫寧
(南京林業(yè)大學(xué) 汽車與交通工程學(xué)院,南京 210037)
0 引言
無人物流車作為較早被應(yīng)用于物流行業(yè)的智能交通運(yùn)輸系統(tǒng),已在道路運(yùn)輸及倉儲(chǔ)環(huán)節(jié)中初具使用規(guī)模[1]。但由于當(dāng)前無人物流車系統(tǒng)車輛智能化程度較低,仍大規(guī)模采用人工調(diào)度管理等因素,造成調(diào)度管理效率較低,車輛關(guān)鍵信息更新滯后,難以組成穩(wěn)定車輛編隊(duì),限制了其優(yōu)勢(shì)的發(fā)揮且實(shí)效性較低。
目前,國內(nèi)對(duì)于無人物流車系統(tǒng)的研究方向比較分散,未能形成一套全面的系統(tǒng)設(shè)計(jì)與配套軟硬件整合解決無人物流車系統(tǒng)實(shí)效性較低的問題[2]。
本文設(shè)計(jì)了一種基于K60 單片機(jī)的無人智能物流車編隊(duì)匯入控制與管理系統(tǒng)。系統(tǒng)通過硬件模塊完成VANET 背景下車輛自主環(huán)境感知,決策規(guī)劃與協(xié)同運(yùn)動(dòng),完成編組整合的柔性車隊(duì),相對(duì)于單車或者分散車隊(duì)行駛具有更高的穩(wěn)定性和魯棒性,并且可減小空氣阻力節(jié)約能源[3]。同時(shí),車輛與車隊(duì)的實(shí)時(shí)信息通過GPRS 同步傳輸至上位機(jī)管理界面,實(shí)現(xiàn)無人物流車的智能化編隊(duì)匯入控制與管理,進(jìn)而從一定程度上提高無人物流車系統(tǒng)對(duì)于物流行業(yè)的實(shí)效性。
1 系統(tǒng)模型
如圖1 所示本系統(tǒng)以K60 單片機(jī)為核心,通過車載局域網(wǎng)(VAN)實(shí)現(xiàn)各模塊間數(shù)據(jù)信息傳輸。當(dāng)車隊(duì)正常行駛時(shí),系統(tǒng)利用無線通訊模塊向上位機(jī)管理界面實(shí)時(shí)上傳當(dāng)前速度、位置、道路情況、網(wǎng)絡(luò)情況等車隊(duì)關(guān)鍵信息,當(dāng)車輛收到匯入指令后,利用無線通訊模塊連接匯入車隊(duì)車載自組織網(wǎng)(VANET)。一方面,將本車速度、位置等信息上傳匯入車隊(duì)并獲取車隊(duì)速度、位置等信息,完成信息交流共享;另一方面,發(fā)出協(xié)作申請(qǐng),中心決策模塊處理解算數(shù)據(jù),完成匯入軌跡規(guī)劃并通報(bào)匯入車隊(duì)。最終由中心決策模塊協(xié)調(diào)車輛與匯入車隊(duì)協(xié)同行駛。利用融合傳感器與綜合定位模塊實(shí)時(shí)監(jiān)測(cè)匯入進(jìn)程并同步上傳至上位機(jī)管理界面,通過運(yùn)動(dòng)控制模塊對(duì)車輛速度、加速度、姿態(tài)等進(jìn)行實(shí)時(shí)跟蹤,修正完成匯入。
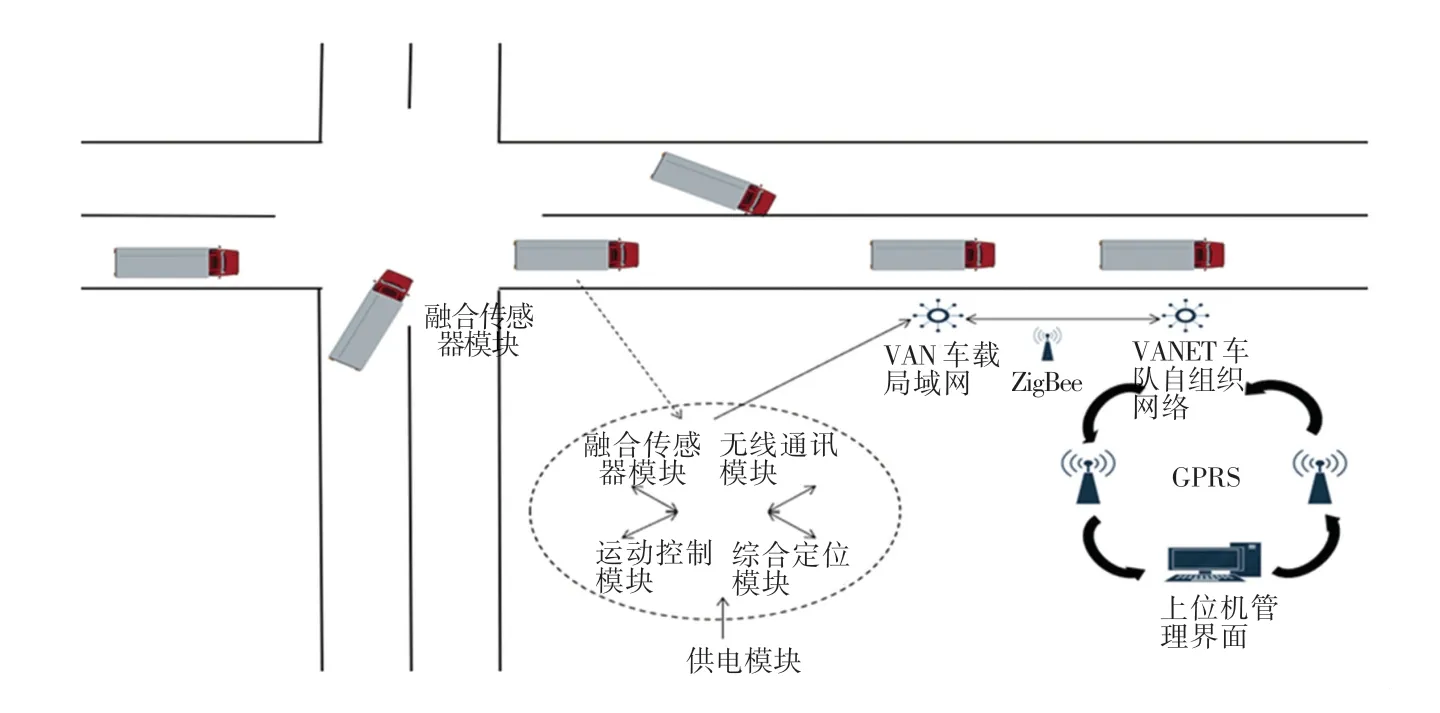
圖1 系統(tǒng)結(jié)構(gòu)圖Fig.1 System structure diagram
2 硬件電路設(shè)計(jì)
系統(tǒng)硬件電路主要包括:供電模塊、融合傳感器模塊、綜合定位模塊、無線通訊模塊、中心決策模塊、運(yùn)動(dòng)控制模塊等。
2.1 供電模塊設(shè)計(jì)
由于系統(tǒng)各硬件電路運(yùn)行均需要3.3~6.0 V 電壓,因此供電模塊選用7.2 V 鎳氫蓄電池組為電源。由LM2577 穩(wěn)壓芯片控制的電源管理電路完成穩(wěn)壓調(diào)節(jié)及電平轉(zhuǎn)換[4],將7.2 V 電壓轉(zhuǎn)化為3.3 V、5 V、6 V 電壓,進(jìn)而為各模塊提供與之需求相匹配的穩(wěn)定電源輸出。
2.2 融合傳感器模塊
融合傳感器模塊采用機(jī)器視覺與雷達(dá)融合的技術(shù)方案。利用BP 神經(jīng)網(wǎng)絡(luò)模型算法完成數(shù)據(jù)轉(zhuǎn)換及數(shù)據(jù)相關(guān)與融合推理,實(shí)現(xiàn)多傳感器環(huán)境感知信息融合互補(bǔ)。彌補(bǔ)單一傳感器精度較低,穩(wěn)定性較差的缺陷,為換道匯入的實(shí)現(xiàn)提供精準(zhǔn)的車輛運(yùn)動(dòng)信息、道路信息與軌跡監(jiān)測(cè)[5]。
融合傳感器選用FQY888A 型CCD 攝像頭與HDL32E 激光雷達(dá)[6-7]。如圖2 所示,F(xiàn)QY888A 分辨率為350 線,可輸出制式PAL/NTSC 標(biāo)準(zhǔn)視頻信號(hào)至LM1881 芯片,進(jìn)行視頻同步信號(hào)分離。結(jié)合圖像信號(hào),由K60 單片機(jī)完成解析處理,得到路徑數(shù)據(jù)。HDL32E 激光雷達(dá)共有32 線激光掃描束,垂直方向可視范圍41.3°,水平視野360°,角度分辨率0.09°,距離精度2 cm,可實(shí)現(xiàn)較全面的高精度實(shí)時(shí)環(huán)境感知。
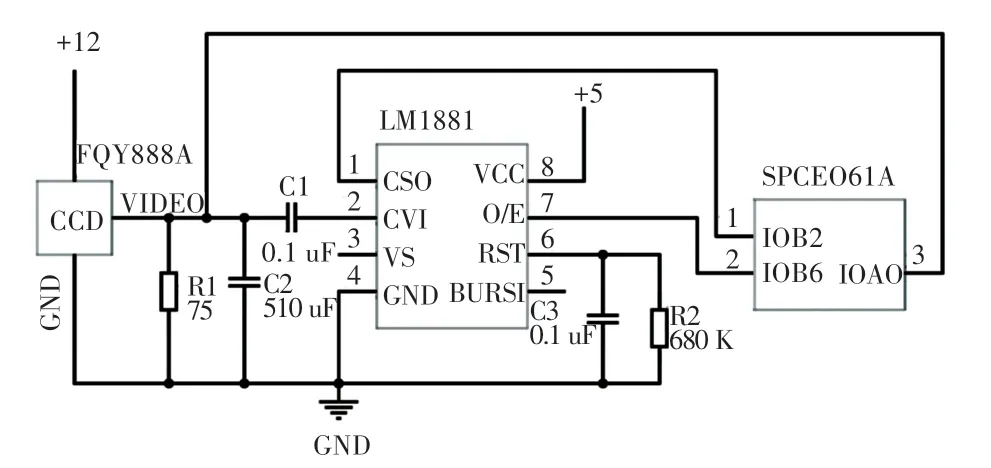
圖2 CCD 圖像傳感器電路Fig.2 CCD image sensor circuit
2.3 綜合定位模塊
綜合定位模塊采用GPS 定位、SLAM 并發(fā)建圖與定位以及VANET 車載自組網(wǎng)結(jié)合的技術(shù)方案[8]。利用貝葉斯網(wǎng)絡(luò),將來自GPS 的車輛位置坐標(biāo)、來自VANET 的車間相對(duì)距離、方位角信息以及SLAM 構(gòu)建電子信息地圖,進(jìn)行信息整合,為換道匯入行為提供較為精準(zhǔn)的車輛實(shí)時(shí)定位信息。
如圖3 所示,GPS 接收機(jī)選用的LEA-5X 模組[9]。首次定位時(shí)間<1 s,最大更新速率<4 Hz,定位精度Auto <2.5 m,SBAX <2 m,定時(shí)精度RMS <50 ns。對(duì)車輛位置的絕對(duì)坐標(biāo)定位精度較高,穩(wěn)定性強(qiáng)。
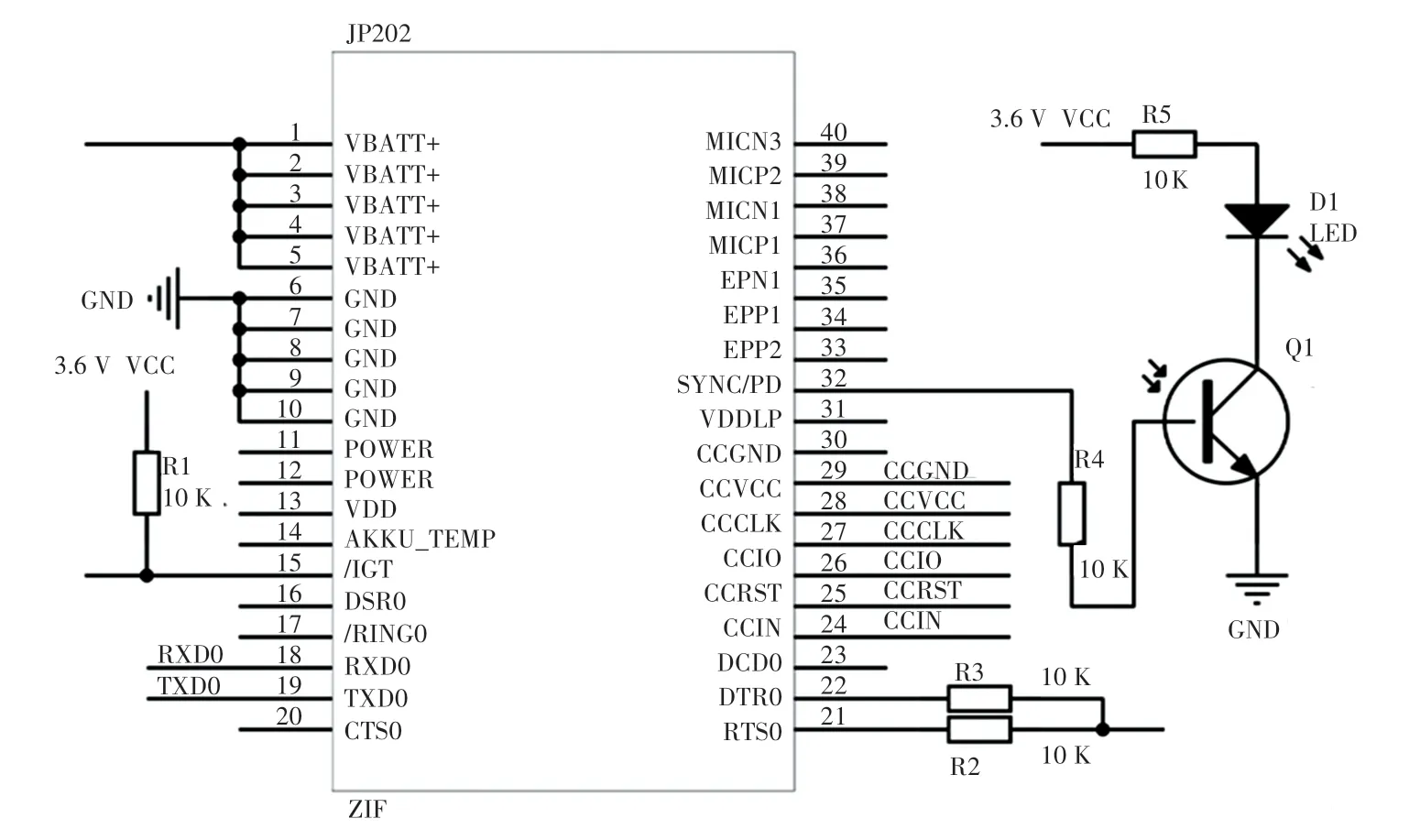
圖3 GPS 定位模組電路Fig.3 GPS positioning module circuit
2.4 無線通信模塊
無線通信模塊采用GPRS 與Zigbee 結(jié)合的技術(shù)方案。利用GPRS 傳輸距離遠(yuǎn)、傳輸速率高、接入迅速的特點(diǎn),實(shí)現(xiàn)車輛車隊(duì)與上位機(jī)管理界面的關(guān)鍵信息實(shí)時(shí)同步傳輸。ZigBee 具有功耗低、延遲低、網(wǎng)絡(luò)容量大且便于嵌入智能傳感器的特點(diǎn),用以實(shí)現(xiàn)VAN 車載局域網(wǎng)與VANET 車隊(duì)自組織網(wǎng)絡(luò)的搭建,完成單車信息融合與車隊(duì)信息廣播共享。
如圖4 所示,GPRS 選用MC39I 模塊,其發(fā)送功率為31~33 dBm、接收靈敏度-102~-105 dBm、40引腳ZIF 連接器可完成指令、數(shù)據(jù)、語音信號(hào)及控制信號(hào)的雙向快速傳輸,實(shí)現(xiàn)車輛/車隊(duì)與上位機(jī)管理界面實(shí)時(shí)數(shù)據(jù)傳輸及指令傳達(dá)。
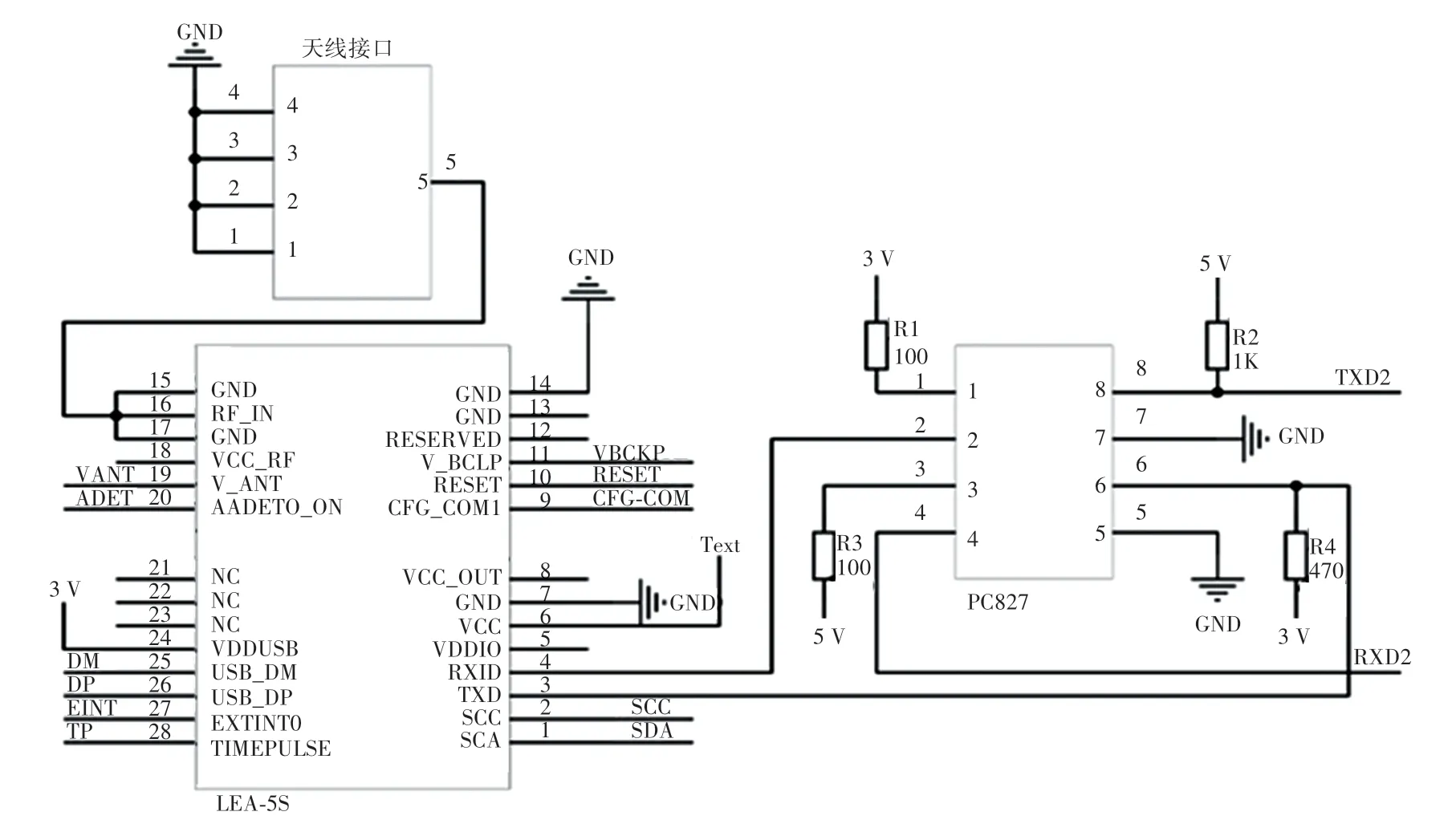
圖4 GPRS 通信模組電路Fig.4 GPRS communication module circuit
ZigBee 選用CC2530 模塊,如圖5 所示。其數(shù)據(jù)傳輸速率250 kbps、接收靈敏度-94 dBm,設(shè)有4總線SPI 接口[10]。利用其搭建起的VAN 車載局域網(wǎng)與VANET 車隊(duì)自組織網(wǎng)絡(luò),單車可完成各模塊與傳感器采集信息的融合,車隊(duì)可完成信息廣播共享,進(jìn)而得到更精確的車輛速度加速度,相對(duì)位置等信息。
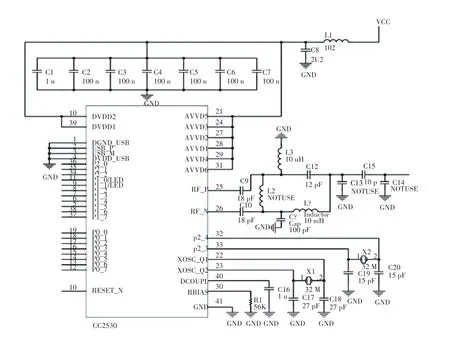
圖5 ZigBee 通信模組電路Fig.5 ZigBee communication module circuit
2.5 中央決策模塊
中央決策模塊采用K60 單片機(jī)作為處理決策核心。K60 是基于ARM Cortex-M4 內(nèi)核的32 位MCU,將Cortex-M 系列處理器低功耗與良好的信號(hào)處理能力相結(jié)合。內(nèi)核自帶DSP 指令性能,可達(dá)1.25 DMIPS/MHz,具有高性能、高精度的混合信號(hào)能力,運(yùn)算速度快、精度高[11]。可實(shí)現(xiàn)對(duì)車輛速度、加速度、相對(duì)位置,道路環(huán)境,車隊(duì)狀態(tài)等融合信息的綜合計(jì)算處理。以解算出的高精度數(shù)據(jù),支持車輛換道匯入軌跡規(guī)劃,進(jìn)而完成VANET 車隊(duì)自組織網(wǎng)絡(luò)背景下的多車協(xié)同駕駛決策協(xié)調(diào)。
2.6 運(yùn)動(dòng)控制模塊
如圖6 所示,運(yùn)動(dòng)控制模塊采用以MC9S12DG128單片機(jī)為核心的模糊自適應(yīng)PID 控制器[12]。單片機(jī)對(duì)車輛前瞻量、速度偏差、位置偏差等基本量的采樣周期為10 ms。通過模糊邏輯算法輸入非線性量誤差e 與誤差變化Δe,以滿足不同時(shí)刻3 個(gè)PID 閉環(huán)參數(shù)的確定。同時(shí)不斷監(jiān)測(cè)e 與Δe 進(jìn)而控制參數(shù)在線自適應(yīng)整定,得到比傳統(tǒng)PID 控制器更好的控制性能,實(shí)現(xiàn)準(zhǔn)確快速的車輛換道匯入軌跡跟蹤與姿態(tài)修正[13]。
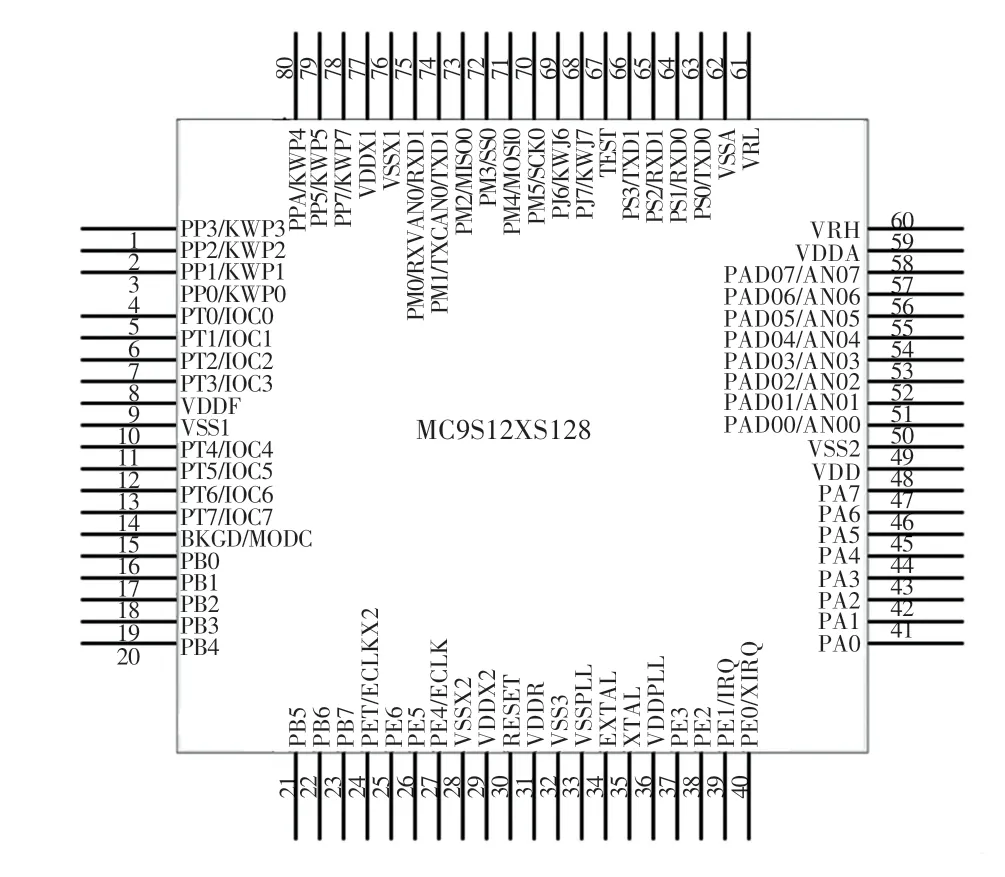
圖6 MC6S12XS128 最小系統(tǒng)電路Fig.6 MC6S12XS128 minimum system circuit
3 系統(tǒng)軟件設(shè)計(jì)
軟件設(shè)計(jì)選用Visual Basic 6.0 軟件,搭建無人智能物流車編隊(duì)匯入控制與管理系統(tǒng)界面。
如圖7 所示,軟件主界面由車隊(duì)信息查詢管理,車隊(duì)編組規(guī)劃,已編組車隊(duì)匯入監(jiān)測(cè),已編組車隊(duì)管理,問題反饋,個(gè)性化設(shè)置6 個(gè)區(qū)域組成。普通用戶可使用車隊(duì)信息查詢、已編組車隊(duì)實(shí)時(shí)狀態(tài)監(jiān)測(cè)、已編組車隊(duì)運(yùn)行軌跡查詢等功能;管理員在此基礎(chǔ)上可使用車隊(duì)發(fā)車管理、車隊(duì)編組規(guī)劃、已編組車隊(duì)匯入監(jiān)測(cè)等功能。
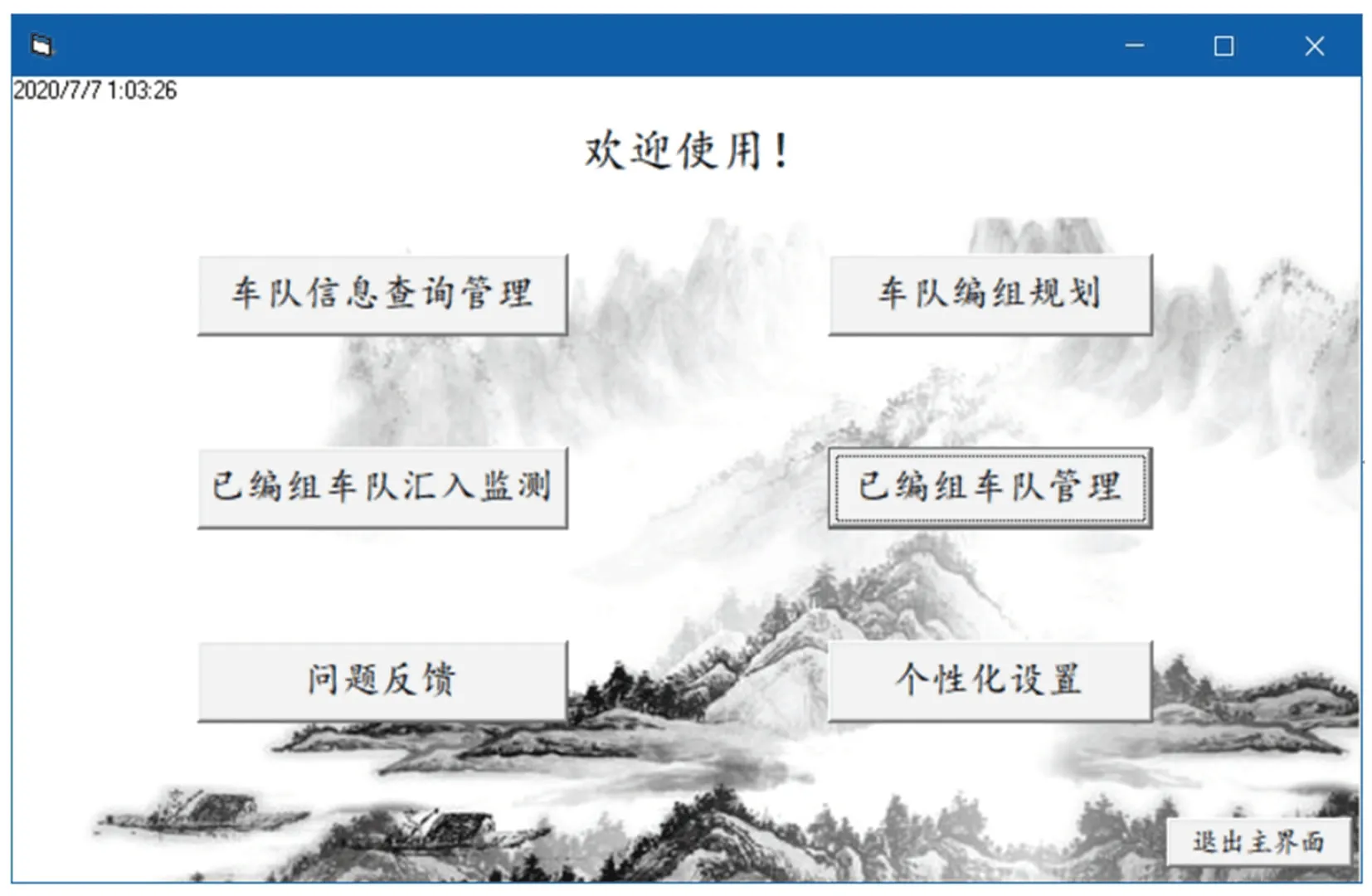
圖7 系統(tǒng)主界面Fig.7 Software main interface
利用圖8 所示界面,可以選擇不同出發(fā)地與目的地的車隊(duì)。通過系統(tǒng)車載單元實(shí)時(shí)回傳的數(shù)據(jù),可查詢已出發(fā)車隊(duì)自組織網(wǎng)絡(luò)運(yùn)行情況、車隊(duì)包含車輛數(shù)、車隊(duì)車速、當(dāng)前位置、預(yù)計(jì)到達(dá)時(shí)間等信息;查詢未出發(fā)車隊(duì)預(yù)計(jì)出發(fā)時(shí)間、到達(dá)時(shí)間、車隊(duì)包含車輛數(shù)等信息。管理人員可設(shè)置未出發(fā)車隊(duì)預(yù)計(jì)出發(fā)時(shí)間。
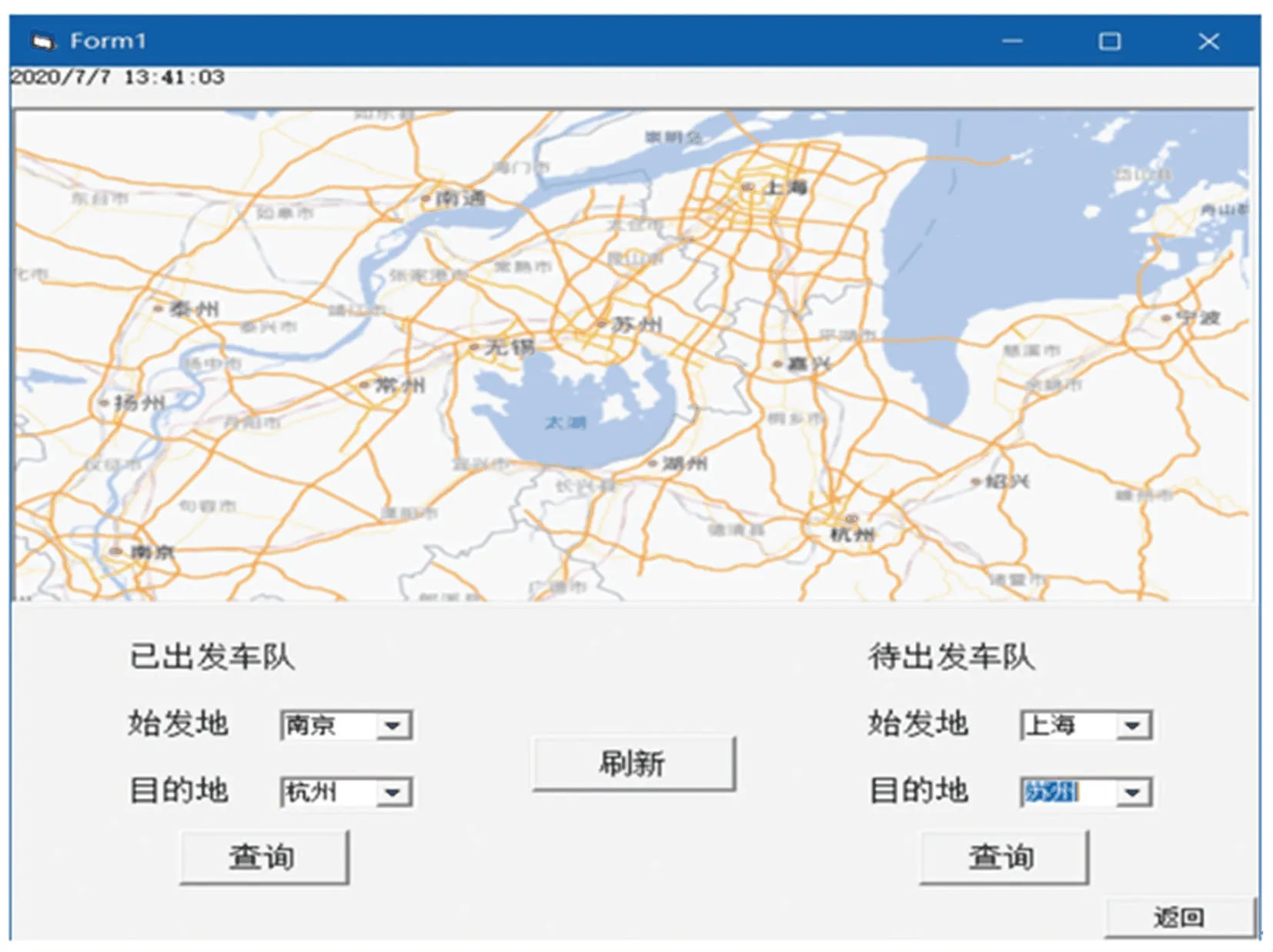
圖8 車隊(duì)信息查詢Fig.8 Fleet information inquiry
管理人員將車隊(duì)信息代入最大收益模型,結(jié)合道路信息,計(jì)算出車隊(duì)編組匯入的時(shí)間節(jié)點(diǎn)與位置信息[14]。通過圖9 所示界面,完成車隊(duì)編組規(guī)劃并向各車隊(duì)傳輸匯入點(diǎn)信息與匯入指令。各車隊(duì)在指定時(shí)間節(jié)點(diǎn)與匯入位置,利用車載匯入控制單元完成柔性車隊(duì)整合編組。

圖9 車隊(duì)編組規(guī)劃Fig.9 Fleet formation planning
如圖10 所示,通過系統(tǒng)車載單元,對(duì)車輛換道匯入過程中實(shí)時(shí)狀態(tài)采樣檢測(cè),并同步上傳至本界面。一方面可實(shí)現(xiàn)對(duì)各車隊(duì)巡航車速、實(shí)時(shí)橫縱向加速度、實(shí)時(shí)航向角、實(shí)時(shí)車間距等關(guān)鍵車輛信息的遠(yuǎn)程監(jiān)測(cè);另一方面,綜合數(shù)據(jù)形成車輛換道匯入軌跡圖像、加速度變化趨勢(shì)圖像,為管理人員評(píng)估車隊(duì)換道匯入過程的安全性提供分析依據(jù)[15]。
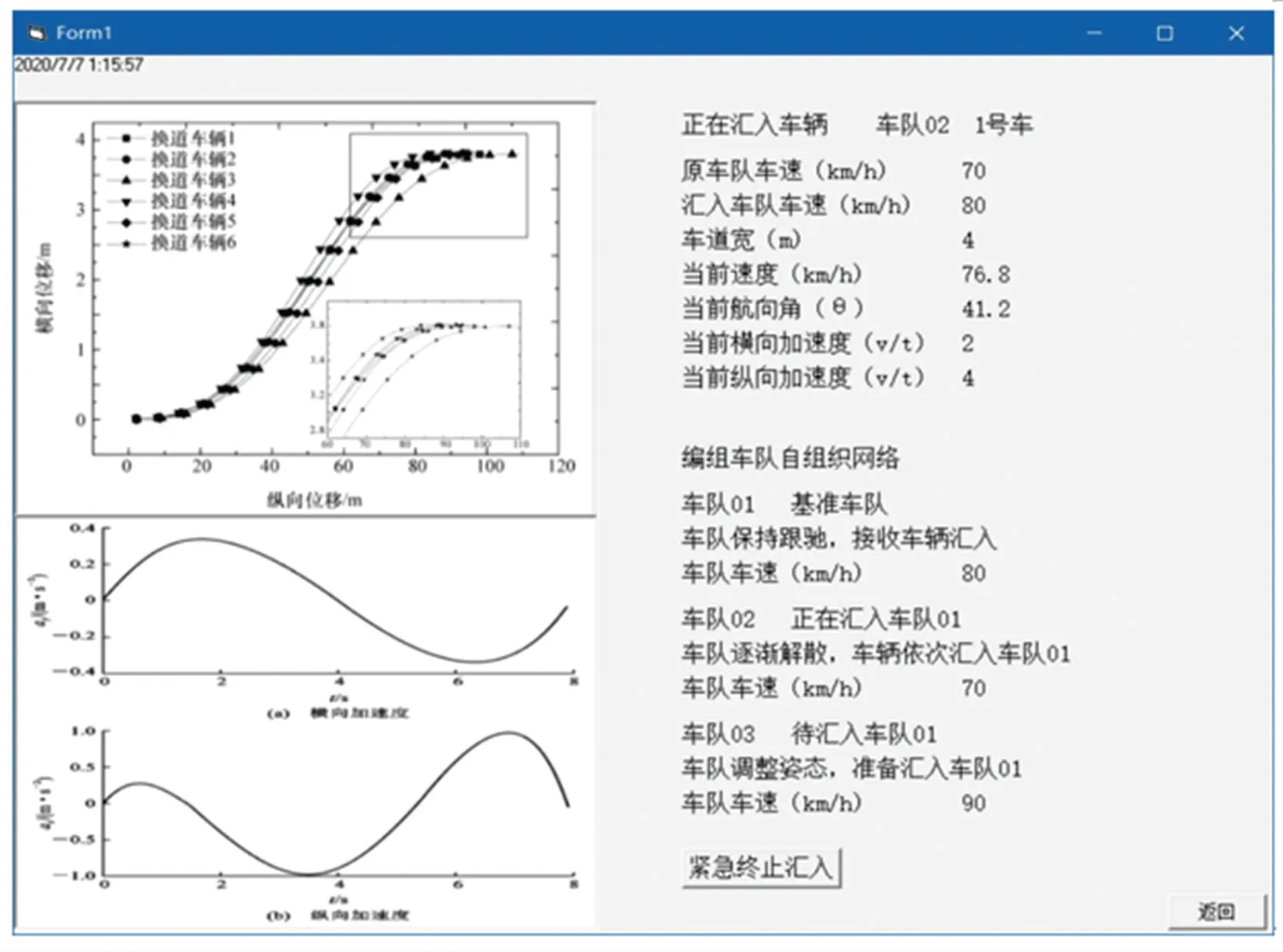
圖10 已編組車隊(duì)匯入監(jiān)測(cè)Fig.10 Organized fleet merging monitoring
各車隊(duì)完成換道匯入編組為柔性車隊(duì)后,通過VANET 車隊(duì)自組織網(wǎng)絡(luò)以及各車系統(tǒng)車載單元,對(duì)車隊(duì)的速度、位置、車隊(duì)自組織網(wǎng)絡(luò)的信號(hào)強(qiáng)度、延遲等信息實(shí)時(shí)檢測(cè),并上傳至圖11 所示界面。管理人員可通過界面信息對(duì)柔性車隊(duì)運(yùn)行情況進(jìn)行監(jiān)測(cè),點(diǎn)擊自檢按鍵對(duì)柔性車隊(duì)的穩(wěn)定性進(jìn)行評(píng)估,點(diǎn)擊自主規(guī)劃按鈕對(duì)已到達(dá)柔性車隊(duì)的下達(dá)分離與獨(dú)立路線規(guī)劃指令,進(jìn)而完成已編組車隊(duì)的遠(yuǎn)程監(jiān)測(cè)與管理。

圖11 已編組車隊(duì)管理Fig.11 Organized fleet management
4 結(jié)束語
本文設(shè)計(jì)的無人智能物流車編隊(duì)匯入控制與管理系統(tǒng)以K60 單片機(jī)為核心,通過硬件模塊完成VAN 與VANET 的搭建、車輛車隊(duì)關(guān)鍵信息的精確感知與實(shí)時(shí)上傳、換道匯入的處理決策、路徑規(guī)劃、協(xié)同駕駛、以及換道匯入過程的軌跡跟蹤與姿態(tài)修正,通過軟件模塊完成無人智能物流車編隊(duì)的遠(yuǎn)程監(jiān)測(cè)與管理。在一定程度上解決了當(dāng)前無人物流車系統(tǒng)對(duì)于物流行業(yè)實(shí)效性較低的問題,具備可行性。
猜你喜歡
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
電子制作(2019年13期)2020-01-14 03:15:28
物流技術(shù)與應(yīng)用(2019年8期)2019-09-04 03:29:56
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
汽車觀察(2018年12期)2018-12-26 01:05:44
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
濰坊學(xué)院學(xué)報(bào)(2016年2期)2016-12-01 13:00:11
新聞傳播(2015年11期)2015-07-18 11:15:04
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09