遙感衛星數據預處理系統復雜任務調度模型研究與實現
2021-12-18 05:44:46陳亮李景山
遙感信息 2021年5期
陳亮,李景山
(1.中國科學院空天信息創新研究院,北京 100094;2.中國科學院大學 電子電氣與通信工程學院,北京 100094)
0 引言
遙感衛星數據預處理系統是衛星地面系統的重要組成部分之一,是獲取衛星產品數據的重要環節,國內外很多學者和組織都對遙感衛星數據處理系統及預處理算法進行了深入的研究。大型衛星圖像數據處理中心越來越多地開發模塊化的多任務開放式架構[1]。基于工作流的預處理系統具有較為廣泛的應用[2-3],根據不同衛星的預處理要求,將衛星的預處理任務以工作流形式串聯起來,解決了遙感衛星數據預處理系統多衛星處理功能擴展問題。
隨著預處理系統中新的衛星處理功能不斷集成,預處理任務的復雜程度也隨之提高,主要體現在以下三個方面。一是任務類型復雜。不同衛星、不同處理階段都對應不同的任務類型。二是任務組合復雜。同一時刻需對多種任務類型進行調度。三是任務需求復雜。根據處理要求,各衛星處理任務在常規和應急情況下所處理的數據時效性和系統吞吐量要求存在差異。復雜的預處理任務對調度算法提出了更高的要求。
本文所要研究的內容是通過建立調度模型對機群環境下的遙感衛星數據預處理系統中的復雜任務進行調度,在滿足預處理數據時效性要求的同時,提高系統吞吐量。相關概念定義如下。
1)系統吞吐量。系統在單位時間內的工作量。具體在遙感衛星數據預處理系統中,吞吐量表示為單位時間內處理原始碼流數據的總數據量。
2)數據時效性。是指從接收到原始數據開始,到完成目標產品生產,并向用戶分發的整個過程的時間要求。
1 調度算法分析及問題描述
傳統調度算法主要從時間和資源兩個角度對任務進行調度,如最基本的調度算法包括先來先服務(first come first serve,FCFS),根據任務所需資源數目多少而采取的大任務優先(largest job first,LJF)、小任務優先(smallest job first,SJF),根據任務執行時間采取的長任務優先(longest processing time first,LPT)、短任務優先(shortest processing time first,SPT),根據任務等待時間采取的資源預約(reservation)、加權輪轉調度(weighted round-robin),以及為提高資源利用率而采取的各種回填算法(backfilling)、首次適應算法(firstfit)、貪婪算法(greedy)等。這些調度算法因邏輯簡潔且具有較強通用性,因而被廣泛應用。但這些算法在進行任務調度時,任務資源是用戶提交任務時指定的,且在調度過程中是固定的,調度算法僅根據特定規則對任務執行次序進行調度,并未考慮資源可動態分配任務的調度需求。
為解決遙感衛星數據處理任務在調度過程中資源分配的問題,史園莉等[4]提出了“雙級調度策略”實現資源的最優分配,其中“一級資源調度策略”根據“最優資源分配經驗查找表”自動獲得任務對應的最優資源數,“二級資源調度”采用傳統的調度策略和算法對進行過資源重新分配的任務進行調度;湯燦恩等[5]提出了一種“基于先驗知識動態分配資源的調度策略”,以任務單位資源量、單位數據量的運行時間和機群的實時系統負載作為依據,動態地決定任務分配的資源數;葛強等[6]為解決系統負載均衡及緊急任務調度的問題,提出了一種基于任務需求與服務能力相匹配的遙感產品生產任務調度算法。這些調度算法雖然具體實現的方式不同,但都是通過增加調度過程中任務和系統相關信息的方式,改善了傳統方法在特殊應用場景下針對特殊需求時的調度效果。本文在進行研究時,也從系統和任務特性的角度展開,從而更好地對預處理系統中的復雜任務進行調度。
遙感衛星數據預處理系統與用戶交互式數據處理系統不同。用戶交互式處理系統中,用戶通過客戶端等途徑提交隨機處理任務,并希望更早得到結果數據;而遙感衛星數據預處理系統則一般通過衛星地面站獲取衛星下傳的原始碼流數據,并由系統自動發起并完成各級產品生產、分發等工作。基于上述遙感衛星數據預處理業務,預處理系統在性能上主要有兩方面要求:數據時效性要求及系統吞吐量。數據時效性要求是指在規定時間內完成所需產品生產,一般并不強調完成時間越短越好。表1為高分六號在數據時效性和系統吞吐量方面的具體要求。
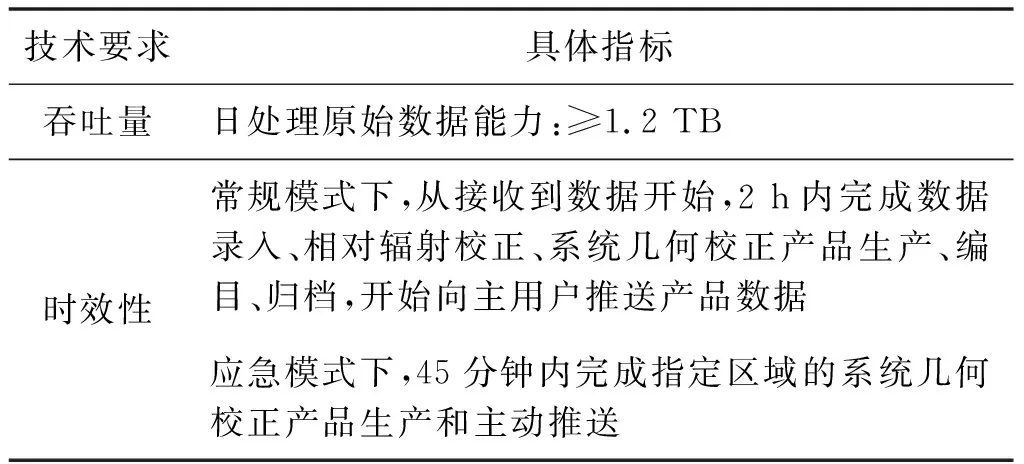
表1 高分六號數據處理要求
綜上所述,本文所要解決的問題為從預處理系統和任務的角度,建立相應的調度模型,從而滿足系統中多衛星數據產品同時生產時的時效性要求,并提高預處理系統的吞吐量。實驗結果表明,本文建立的調度模型通過采用更具針對性的資源分配策略,既滿足了多衛星數據同時處理時的時效性要求,也提高了預處理系統的吞吐量。
2 調度模型研究
本調度模型所解決的兩個關鍵問題及本文的主要工作如下:為復雜任務資源動態分配提供合理的依據;通過對任務執行次序進行調度確保所有任務滿足時效性要求。在綜合考慮預處理任務的各方面特征和預處理系統特性后,遙感衛星數據預處理復雜任務調度模型的設計結構如圖1所示。

圖1 遙感衛星數據預處理復雜任務調度模型結構
1)預處理任務性能模型。對預處理系統中的復雜任務進行研究分析,將復雜任務的性能差異通過模型參數差異進行體現,建立符合各任務特性的性能模型,從而對并行任務的執行時間進行預估,提供更為詳細的任務信息作為調度算法的決策依據。
2)工作流任務預估模型。根據各衛星處理業務的工作流,對預處理任務及其子任務的數量和總執行時間進行預估,并根據數據時效性規定的時間,計算各階段預處理任務的最長等待時間之和,從而將數據時效性要求轉化為各階段處理任務的時效性要求。
3)任務時效性及系統資源利用率驅動的調度算法。充分利用預處理任務性能模型和工作流任務預估模型提供的任務信息,動態調整任務的資源分配和執行次序,以滿足時效性要求為前提減少資源碎片,提高系統吞吐量。
2.1 預處理任務性能模型
在具體闡述如何建立預處理任務性能模型前,需引入總并行開銷[7](total overhead)的概念。求解同一個問題,開銷函數To的表示如式(1)所示。
To=pTp-Ts
(1)
式中:Ts表示最快串行算法運行時間;并行運行情況下,p表示所用資源總數;Tp表示單個資源運行時間;所有資源所用總時間之和可以表示為pTp,這個時間的Ts部分是完成有用工作所花費的時間,剩余部分即是開銷。
機群平均資源利用率(Uave)是一段時間內任務所用資源與機群總資源的比值,用于衡量機群資源的利用情況,定義如式(2)所示。
(2)
式中:Ntask表示任務總數;pi和Ti分別表示第i個任務所用資源數和執行時間;分母中Ttotal表示所有任務的總執行時間;Nnode表示機群總節點數;Nk表示第k個節點的資源數。
根據式(1),機群平均資源利用率的分子可以表示為所有任務的總并行開銷與所有任務的有用工作時間之和,則總執行時間的表示如式(3)所示。
(3)
式中:Toi表示第i個任務的總并行開銷;Tsi表示第i個任務的最快串行算法運行時間。
對于預處理系統而言,在輸入數據一定時,有用工作所花費的時間總和是一定的。由式(3)可知,機群平均資源利用率Uave越高,所有任務的總并行開銷越小,總執行時間Ttotal也就越短,系統吞吐量越高。
因不同任務的總并行開銷各不相同,建立性能模型對其進行定量描述,可在滿足任務時效性要求為任務分配更多計算資源的同時,降低因并行帶來的總并行開銷之和,減少資源浪費,從而提高系統吞吐量。
性能模型的建模方法有很多種,但從原理上主要分為三類:程序源代碼人工分析的解析建模、通過插樁等手段記錄程序行為并還原的模擬建模、通過記錄程序執行日志并進行學習的經驗建模方法[8-9]。本文在進行預處理任務性能模型建模時,對于源代碼不可獲取的第三方軟件使用經驗建模法,對于源代碼可獲取的并行程序使用解析建模和經驗建模相結合的方法。依據任務能否進行動態資源分配,將預處理任務分為兩類:一類是剛性任務,這類任務無法進行動態資源分配,必須獲取指定資源后才能執行,為方便研究,串行任務也認為是一種特殊的剛性任務;另一類為可塑任務,該類任務在執行前能根據任務可用的資源進行動態資源分配。
遙感衛星數據預處理流程主要包括幀同步、解擾、譯碼、通道分離、圖像數據解壓縮、輔助數據解析、相對輻射校正、系統幾何校正等。處理流程繁雜,且各階段的處理任務完全不同,但相同點是在預處理的整個流程的每一階段所處理的數據都具有嚴格的格式規定,如圖2所示。

圖2 預處理各階段格式
雖然不同的預處理系統具體實現預處理功能的形式存在不同,但各階段處理任務的處理邏輯一般均為對“最小格式數據單元”處理的循環。如輔助數據解析階段根據相機數據編排格式解析出衛星姿態、衛星位置等信息。圖3為高分六號衛星的相機數據編排格式。高分六號的高分相機每寫入32行圖像數據完成一次輔助數據插入,因而在進行預處理時,則按照數據格式每32行為一周期,循環解析輔助數據。
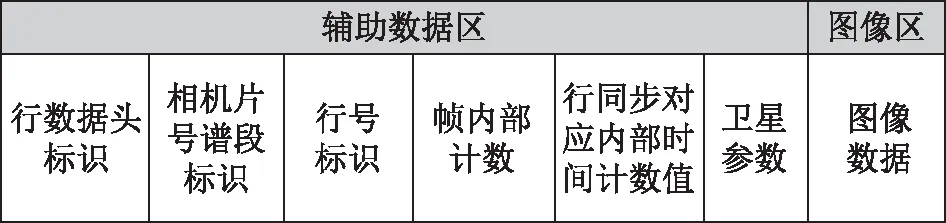
圖3 高分六號輔助數據格式
據此,可歸納出遙感衛星數據預處理程序的一般邏輯,如圖4所示。首先,加載用于描述數據格式信息的配置文件,讀取元數據文件中信息;然后,根據配置文件中的數據幀的幀頭標識符及幀結構獲取所有數據幀的起始結束位置,再采取循環的方式對每一幀數據進行解析;最后,進行元數據文件更新、數據輸出、資源釋放等。
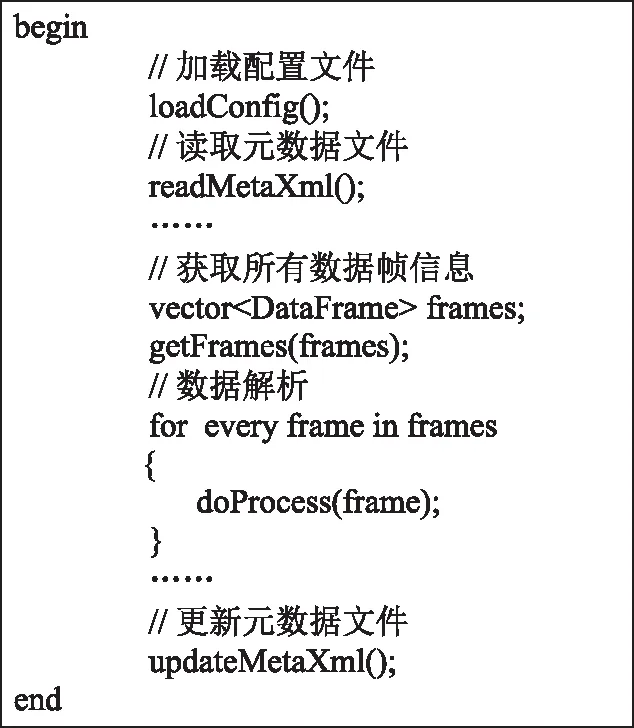
圖4 遙感衛星預處理程序一般邏輯偽代碼
串行遙感衛星預處理程序的執行時間計算如式(4)所示。
Ts=Nframe·Tsingle+Tpre & fin
(4)
式中:Nframe表示處理數據幀個數;Tsingle表示處理一個數據幀所需時間;Tpre & fin表示環境準備和程序結束數據輸出的時間。在對遙感衛星預處理串行程序進行時間預估時,需先實驗測算或在代碼中以“插樁”的方式獲得Tpre & fin和Tsingle,再根據輸入數據大小計算出輸入數據的“數據幀”個數,即可實現對串行程序執行時間的預估。
遙感衛星預處理的并行程序普遍所采用的編程模型包括MPI和OpenMP以及二者相結合的MPI+OpenMP混合并行編程模型,采用這種方式能夠更簡單高效地利用機群的計算資源[10]。但串行程序在并行化的過程中總會不可避免地引入額外的時間開銷,因此除串行程序性能模型所考慮的因素外,還需額外考慮并行化帶來的額外時間開銷。
對于遙感衛星預處理程序來說,粗粒度并行的任務利用MPI實現機群節點間并行,如多通道原始碼流數據的解格式與通道數據分離;同一傳感器的多個相機數據解壓縮等,而細粒度的并行任務則通過OpenMP實現節點內并行,如同一通道原始碼流數據內幀與幀之間的并行處理;波段配準時,圖像塊之間的并行等。這樣的設計能夠降低并行線程、進程間依賴關系,最大程度消除因進程、線程間通信帶來額外開銷,使并行帶來的額外成本僅與串行分量和進程、線程的建立和銷毀有關。
綜上所述,對于并行的遙感衛星預處理程序,總執行時間Ttotal應由串行分量執行時間Tserial和并行分量執行時間Tparallel組成。
Ttotal=Tserial+Tparallel
(5)
式中:串行分量時間Tserial由“配置文件加載”“元數據文件的讀寫”“線程、進程建立和銷毀”等固定的時間消耗Tconst,以及與數據量有關的“數據加載”“數據寫入”等可變時間消耗r·Sdat組成,其中,r為比例系數;Sdat為輸入數據大小。
Tserial=Tconst+r·Sdat
(6)
而并行分量的執行時間Tparallel又與程序所用節點數Nnode、每個節點所使用的資源數Nres有關。
(7)
式中:Sframe表示單個數據幀大小;Sdat/Sframe表示輸入數據幀個數;t為單個數據幀處理的耗時,通過記錄程序運行過程中的執行數據計算獲得。
式(1)中p的表達如式(8)所示。
p=Nnode·Nres
(8)
當p等于1時,Ttotal與串行情況下有用工作時間Ts相等,如式(9)所示。
Ts=Tconst+r·Sdat+t(Sdat/Sframe)
(9)
當p大于1時,Ttotal與使用p個資源的并行執行時間Tp相等,則根據式(7)、式(9)總并行開銷可表示為式(10)。
(10)
可見,通過建立預處理任務性能模型,可以將遙感衛星數據預處理系統中的復雜任務以統一的任務性能模型表示出來,將任務復雜性轉化為模型參數的差異,并能根據輸入數據大小和分配資源數進行時間預估,計算不同資源分配情況下的總并行開銷。借助預處理任務性能模型,既可以根據任務的時效性要求對復雜任務分配相應資源,又能通過計算不同資源分配情況下,任務組合的總并行開銷之和來減少資源浪費,提高系統吞吐量。
2.2 工作流任務預估模型
在基于工作流的遙感衛星數據預處理系統中,所有衛星數據的處理任務以工作流的方式被串聯起來,當工作流執行到相應階段時則會提交對應的預處理任務。
圖5為高分一號、高分二號衛星的預處理工作流,對于工作流中每個階段的預處理任務都可以依據性能模型獲取任務不同資源分配情況下的預計執行時間,并能根據先驗知識預估提交的任務數目。具體預估算法如下。

圖5 預處理工作流示例
1)根據原始碼流數據頭文件獲取載荷信息。
2)根據載荷信息及原始碼流數據大小確定解壓縮圖像數據塊數目。
3)根據壓縮數據塊數目估計條帶數據行數。
4)根據分景規則計算系統幾何校正產品總景數,至此可以估計出即該軌影像所需執行的所有任務種類和數目。
通過工作流任務預估模型,能夠在接收到原始碼流數據后,對后續流程中所有處理階段提交的子任務進行分階段預估,通過分析預估任務集合,使調度模型獲取將被提交任務的信息,并根據產品的時效性要求和產品的剩余所需執行任務的性能模型計算出后續任務的最長等待時間,從而能夠對更長時間段內的任務進行綜合調度。
2.3 任務時效性及系統資源利用率驅動的復雜任務調度算法
本調度算法分兩次對預處理任務進行調度:首次調度為接收到原始數據且未提交任務前,此時根據產品時效要求對同一工作流內不同階段的預處理任務進行資源分配,以滿足時效性要求;第二次調度根據任務最長等待時間調整執行次序,并根據系統實時資源利用率對任務所需資源進行動態分配。
根據預處理任務性能模型和工作流任務預估模型,預處理復雜任務的參與調度的任務屬性如表2所示。

表2 預處理復雜任務屬性信息
預處理工作流實際為一典型樹狀結構,系統幾何校正產品生產時間可以表示為該產品每一處理階段所用時間的總和,如式(11)所示。
(11)
式中:Ti表示第i階段處理任務的執行時間,而當該任務為可塑任務時,Ti={Tq|Smin≤q≤Smax}。其中,q為分配資源數目;Tq表示當分配資源q時對應的執行時間;Smin和Smax分別為該任務所能利用的最小和最大資源數目。
為滿足產品的時效性要求,需要通過增加資源分配的方式縮短任務的總執行時間。在無約束條件時,為獲取最小的總執行時間,調度算法應盡可能為任務分配更多的計算資源從而更快地獲取數據產品。但由式(10)可知,因串行分量的存在,在對任務分配更多資源時,任務的總并行開銷增加,導致出現資源浪費,因此,在對多任務進行資源分配時,應根據各任務總并行開銷大小進行資源分配。
首次資源分配是為了確保任務在無等待情況下滿足時效性要求,且總并行開銷最小,算法步驟如下。
步驟1:根據工作流任務預估模型計算預處理任務集合,并修改該工作流內部所有任務的時效要求時間。
步驟2:計算預處理任務集合中每個任務的可用資源數據及對應執行時間。
步驟3:所有任務取最小資源分配方案計算總時長。
步驟4:計算單個系統幾何校正產品各階段任務執行總時間。當總時長小于時效要求時間時,以原始數據名為索引,記錄本流程所有任務資源分配方案,并根據工作流由下至上計算剩余任務最長執行時間,第i階段最長執行時間如式(12)所示。
Rcur=Tcur+Rnext
(12)
式中:Rcur表示本階段剩余任務的執行時間,由當前任務執行時間Tcur和下一階段剩余任務執行時間Rnext組成。首次資源分配結束。否則,執行步驟5。
步驟5:若流程中第i階段任務Taski能增加資源分配,則計算由增加資源而產生的額外總并行開銷與降低時間的比值。
(13)
式中:j為當前已分配資源數;Δj為預計增加資源數;Tj和Tj+Δj分別表示在原資源數和增加Δj資源后的執行時間。
該比值表示為在增加資源時,降低單位任務執行時間而產生的額外成本,當Qi最小時,將資源分給該任務,然后繼續執行步驟4。
根據該算法,進行資源分配時,在滿足任務時效性要求的同時,對于并行程度高,串行分量小的預處理任務會被分配更多計算資源,減少了因盲目分配資源出現額外總并行開銷,防止了資源浪費。
第二次資源分配的是為了提高機群平均資源利用率和確保因排隊而未及時執行的任務能夠滿足時效性要求。根據系統實時負載情況進行動態資源分配:系統低負載時,為每個任務分配更多資源提高資源利用率;系統高負載時,通過降低時效要求較長的任務的資源分配數目,從而讓因等待而未能按時提交的任務能夠及時完成。系統實時負載表示為機群實時資源利用率Ur,為使用資源數Rused和總資源數Rtotal的比值。
(14)
算法流程如圖6所示,每當系統資源狀態更新時,進行資源動態分配和任務執行,具體算法如下。

圖6 第二次資源分配算法流程圖
①更新所有任務的最短可等待時間,并由短到長排序,并按序對任務進行調度。
②當存在任務最短可等待時間小于0時,按第一次資源分配算法重新對該任務所處工作流內各階段子任務資源分配,并維持本次任務排序。
③選取排序后等待隊列中前x個任務,直到前第x+1個任務所需資源總和大于當前剩余可用資源。當x>0時,根據式(13)計算最小總并行開銷與加速時間的比值,并將資源分配給該任務,直至剩余可用資源為0。
當x=0時,即可用資源不滿足任務需求。計算資源釋放時間,進行資源預約,計算因預約產生的資源碎片,從排序后的等待隊列中,依次選出滿足資源需求且執行時間小于資源預約時間的任務進行回填。
3 仿真實驗與結果分析
3.1 復雜任務調度系統
調度系統主要包含基礎層、信息層、算法層、應用層四層,如圖7所示。

圖7 遙感衛星數據預處理復雜任務調度系統架構圖
基礎層為調度系統的基礎環境,與遙感衛星數據預處理系統環境一致,預處理系統和調度系統基于高性能對稱多處理(symmetric multi processing,SMP)機群實現,調度系統通過對可移植的批處理系統(portable batch system,PBS)有關命令的封裝實現對機群資源的調度。PBS是目前應用廣泛的機群資源管理系統,已經成為機群系統優先采用的任務管理系統[11],Torque PBS為其開源的免費版本之一。信息層用于提供調度系統在進行調度決策時所需要的任務信息。算法層為前文所述算法的具體實現。應用層主要功能為接收預處理系統提交的預處理任務,并根據任務時效性要求和機群資源利用狀態對任務進行調度,同時提供任務監控功能。
3.2 實驗環境
通用遙感衛星數據處理系統設備系統包含68個計算刀片服務器,計算節點配置如表3所示。
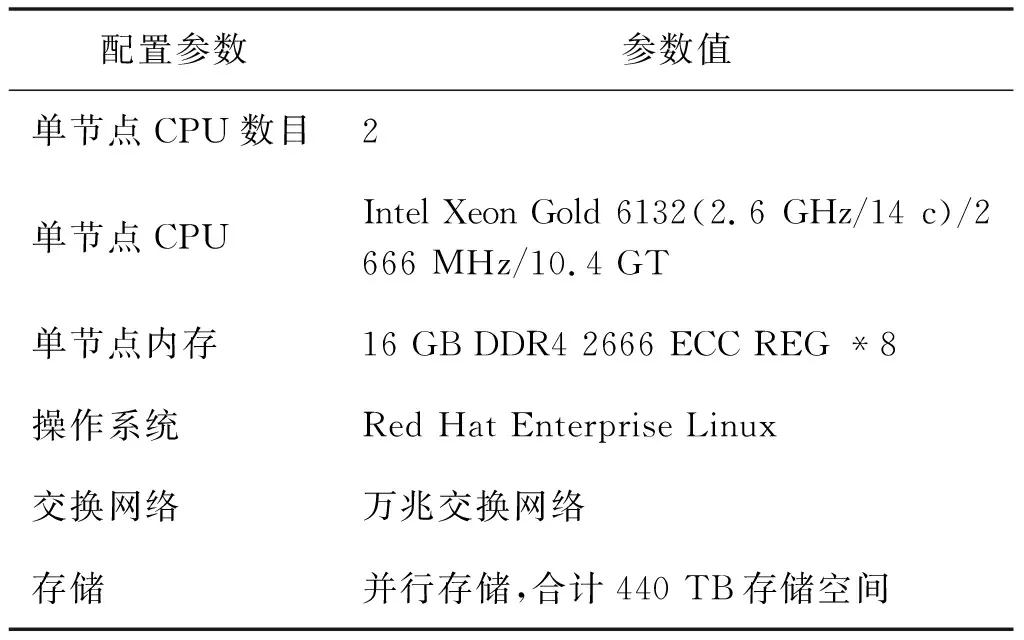
表3 機群計算節點服務器配置
計算系統整體雙精度峰值性能達到158.412 8×1012次/s。配置兩臺數據庫服務器、兩臺管理節點服務器、兩臺數據分發節點服務器,以及一套曙光ParaStor300分布式并行存儲系統,可用容量440 TB,同時并發40 GB/s讀帶寬+40 GB/s寫帶寬(每個節點700 MB/s讀+700 MB/s寫帶寬),整套設備采用萬兆網絡互聯。實驗中,在真實機群環境中測算不同衛星的各預處理任務性能模型,并使用20個計算節點進行仿真實驗。
3.3 實驗結果及分析
實驗中將本文所采用的“二次資源分配算法”分別與傳統調度算法中的“首次適應算法”和“優先級調度算法”在系統吞吐量和任務時效性性能上進行對比。
“首次適應算法”按照任務提交順序選取等待隊列中滿足資源要求的任務進行執行,該算法不會因資源需求較大任務而出現任務阻塞現象,因而能夠提高系統吞吐量。
“優先級調度算法”為系統根據任務優先級依次選擇任務進行執行。實驗中,優先級確定的依據為任務的時效性,任務時效性要求越短任務優先級越高。
傳統調度算法在進行任務資源分配時,采用靜態的資源分配方式,不同衛星不同階段任務所分配的資源數根據經驗值確定,該分配方案能滿足最短時效性要求。通過在預處理任務調度系統算法層中增加算法模塊的方式,實現對上述傳統調度算法的集成。
數據方面,使用高分一、二、六號衛星數據各三軌進行實驗,總原始碼流數據量為420.50 GB。為了模擬數據時效性要求不同時調度的情況,每顆衛星各兩軌數據時效性要求為2 h,模擬常規生產,總數據量304.85 GB;每顆衛星各一軌數據時效性要求為45分鐘,模擬緊急生產,總數據量115.64 GB。采取同時提交多軌原始數據的方式模擬預處理系統高負載。最終系統幾何校正產品共計2 638景,其中,常規生產1 806景,緊急產品832景。
圖8為三種調度算法系統幾何校正產品數目隨時間的變化情況,折線不再隨時間延伸表示已完成所有產品生產。完成所有產品生產前,各時間點及其對應的產品數目差異反映了不同算法的調度行為差異。與傳統算法相比,本調度算法在100分鐘左右率先完成了所有產品的生產任務,吞吐量更高。同時,因本算法在進行調度時,會根據時效性要求進行資源分配,使時效性相同的產品趨于同時完成。故在實驗中,緊急生產和常規生產的產品分別在30分鐘及90分鐘附近集中完成,這使得在集中完成前的一段時間內產品數目低于其他算法。雖然在這些時間段內產品數目較少,但當產品集中完成后,本算法實際耗時更短,系統吞吐量更高。
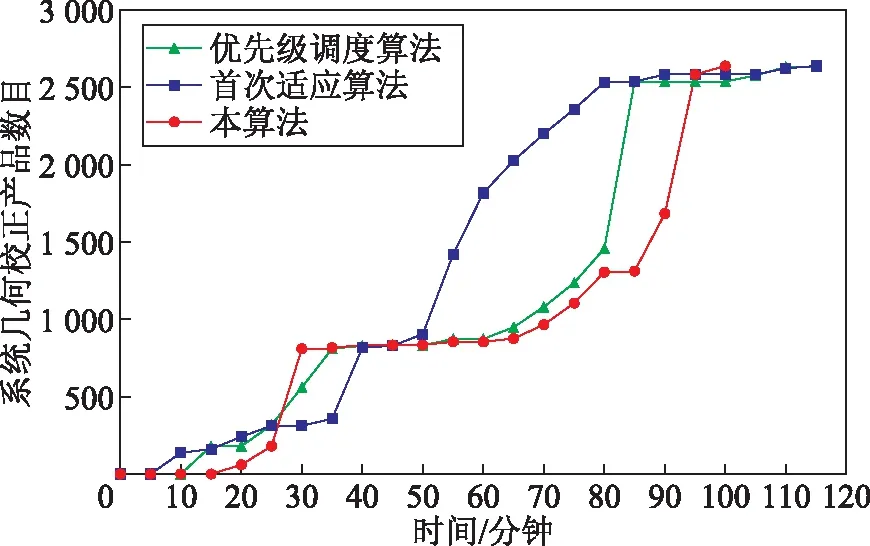
圖8 各算法系統幾何校正產品數目對比
如圖9所示,本算法在30分鐘左右完成所有緊急產品生產,在100分鐘左右完成常規產品生產,相比傳統算法能夠在更短時間內滿足不同產品的時效性要求。“首次適應算法”因在進行任務調度時,僅能獲取單個任務的提交順序、所需資源數,無法對任務類型進行區分,任務調度具有相對隨機性,無法對緊急產品生產任務進行優先調度,最終滿足時效要求產品較少。“優先級調度算法”在進行調度時,因緊急任務具有較高的優先級而優先執行,能夠較好地滿足各類任務的時效性要求。

圖9 各算法滿足時效要求產品數目對比
表4為各算法總執行時間、時效達成率及吞吐量對比。時效達成率為滿足時效要求產品景數與產品總景數的比值;吞吐量為原始碼流數據量與總執行時間的比值。可見本算法在時效達成率和吞吐量上都具有一定優勢。

表4 各算法時效達成率及吞吐量對比
從實驗結果可知,“優先級調度算法”能夠較好地從任務時效性角度對任務進行調度,但當系統負載較高時,存在高優先級任務無法獲取所需資源,而低優先級任務無法及時利用空閑資源的現象,導致了資源浪費,系統吞吐量較低。“首次適應算法”能夠通過按序掃描等待隊列,防止了資源需求較大任務造成的“阻塞”現象,相對于優先級調度法來說很大程度提高了吞吐量,但因調度過程中,僅考慮吞吐量,而未將任務時效性作為調度依據,故任務時效性不同時,難以主動滿足不同任務的時效性要求。本算法在進行調度時,為了使同時提交的所有任務都能滿足時效性要求,會優先對資源需求量大、可等待時間較短的任務進行調度。相應地,會降低剩余子任務較少、可等待時間較長的任務的調度優先級和資源分配數目,從而滿足不同任務的時效性要求,且在進行資源分配時,通過對比不同任務性能,減少了因額外總并行開銷導致的資源浪費,提高了系統吞吐量。
4 結束語
本文針對遙感衛星數據預處理系統中復雜任務在進行資源分配和調度過程中存在盲目性、難以滿足任務時效性要求的問題,在預處理任務性能模型和工作流任務預估模型的基礎上,確定了由任務時效性及系統資源利用率驅動的復雜任務調度算法。該算法通過兩次資源分配,既滿足了任務時效性要求,也更合理地利用了計算資源,減少了資源浪費,提高了系統吞吐量。
但本算法還存在一定的不足,主要表現在本調度算法的基礎是預處理任務性能模型,現階段確定性能模型主要采用人工測算的方式,進行預估時的準確度與測試樣本數相關,當預處理程序版本更新或集成新的衛星處理功能時,測算各任務性能模型的工作量較大。下一步研究計劃為通過記錄任務的執行日志,實現數據驅動的預處理任務性能模型自動建模。一方面提高任務性能模型在預估時的準確性,另一方面提高調度系統的可擴展性,從而更好地對遙感衛星數據預處理系統中的復雜任務進行調度。
猜你喜歡
江蘇安全生產(2023年1期)2023-02-08 05:58:38
工業設計(2022年8期)2022-09-09 07:43:20
吉林廣播電視大學學報(2021年4期)2022-01-14 02:35:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
作文成功之路·小學版(2020年5期)2020-06-11 12:48:26
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小天使·一年級語數英綜合(2018年11期)2018-11-23 09:47:26
家庭影院技術(2017年9期)2017-09-26 03:41:45