超高壓直流閥廳套管智能安裝系統研究
2021-12-21 07:57:26張裕漢萬施霖呂剛王春鐘琳
今日消防 2021年11期
張裕漢 萬施霖 呂剛 王春 鐘琳
摘要:超高壓直流閥廳套管具有設備長度增長、重量增大、安裝難度大、各項安裝工藝控制以及試驗要求細等特點。傳統安裝工藝需使用吊車,且經常憑借現場人員的經驗與目測進行施工。文章提出了一種智能安裝系統,該系統包括一個智能安裝平臺,以及對現場環境的感知與測量、機構的受力分析與設計、過程三維定位和移動機器人動態路徑規劃等四項技術的有機組合,能大幅度提高安裝的程序化、規范化、精細化和智能化。
關鍵詞:超高壓直流閥廳;套管安裝;智能安裝平臺;三維定位;粒子群優化;動態路徑規劃
直流套管用于直流輸電工程,是連接閥廳與直流場的高壓設備[1-2]。超高壓直流閥廳的套管安裝具有以下難點:(1)直流套管為細長件,最長套管近19m,最大套管重約4t,最大安裝高度14m,對安裝施工的平穩性以及對起重指揮、起重設備操作人員及配合人員的作業技能都有較高的要求;(2)直流套管的安裝孔洞與套管僅有裕度約5cm,安裝施工精度要求高;(3)主要涉及細長件高空安裝施工,施工高度高,作業施工面大,常涉及多臺設備在閥廳內、外同時施工,安全風險高[3,4];(4)套管安裝對安裝環境有較高要求,需要保證安裝環境的溫度與濕度。
傳統的套管安裝存在以下缺陷:(1)就拆裝工藝而言,需使用牽引車將換流變牽引至空曠處,采用吊車起吊拆裝套管的方式[5-6],故拆除下方位置套管時,須先拆除上方套管,額外增加了工程量及安全風險;(2)使用吊車起吊拆裝,屬于原始粗放式作業,精度差,套管起吊時易發生碰撞,損壞套管,或套管插入時角度不精確,造成運行時套管與出線裝置接觸摩擦引發設備故障,且存在較大的消防安全隱患;(3)在安裝前缺乏對現場環境的監測。
套管因安裝精度低或因安裝時的碰撞磨損或因運行維護不當,都易造成絕緣損壞、老化,產生絕緣擊穿,產生高溫使套管爆炸起火,從而發生電力火災事故,給人民群眾的生命財產安全造成嚴重威脅及損失。基于此,本文提出了一個套管智能安裝系統,系統包括一個智能安裝平臺,該平臺可在閥廳內操作,直流閥廳內部高壓套管智能安裝平臺直接駛入閥廳內,直接在閥廳內進行套管拆裝作業流程。同時,該系統綜合運用了現場環境的感知與測量、機構的受力分析與設計、過程三維定位、移動機器人動態路徑規劃等四項技術,能大大提高安裝精度,減少了因安裝、作業帶來的消防安全隱患,節省了大量的作業時間和隱性成本。
1? 智能安裝平臺
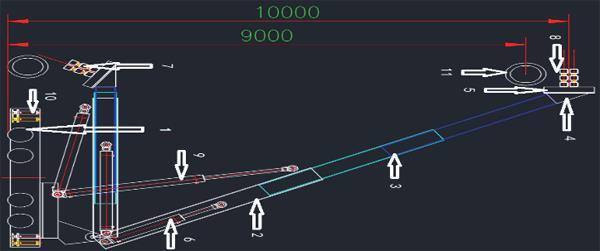
直流閥廳內部高壓套管智能安裝平臺由移動底盤、平衡支腿裝置、升降裝置(變幅大臂、伸縮臂、變幅油缸、伸縮油缸)、頭部旋轉裝置(旋轉控制盤)、滑軌裝置(套管吊臂、吊鉤)等部分組成。平臺可在場地內自由移動,四個支腿具有獨立調節高度功能,底盤上安裝有水平儀,可通過調節四個支腿使得平臺底盤水平,支撐架可旋轉,機械手臂可伸縮,工裝部分可旋轉和伸縮。整個工作過程首先通過移動底盤把裝置移動到換流變套管旁邊,使裝置行走方向與換流變套管軸線在地面上的投影呈90度角,并盡量靠近套管的適合操作的位置上。通過平衡支腿裝置把整個裝置支撐起來,通過升降裝置升降把滑軌移動到需拆卸套管正上方,通過旋轉控制盤調整滑軌角度,使之與套管軸線基本平行,調整套管吊臂長度使之與需拆卸套管匹配,運用吊鉤及輔助吊繩把需拆卸套管吊住,人工拆卸套管安裝螺釘,并使用專用工具把套管從安裝法蘭上頂開,操縱套管吊臂順著套管軸線方向平穩移動,直至套管從安裝法蘭上完全脫開。通過升降裝置、旋轉控制盤的運動,把拆卸套管放置到地面專門運送套管的小車上,完成套管拆卸,并反向執行拆卸動作,把新套管安裝到換流變上,完成整個工作流程。其整體結構如圖1所示。
由于本平臺采用伸縮臂固定套管,通過伸縮、旋轉將套管拆裝或放置于在閥廳內的運轉裝置,避免了牽引換流變的工作流程。與傳統的吊裝工藝相比,減少了設備碰撞與摩擦的風險,一定程度上降低了消防安全隱患,提高了安裝精度與安裝效率。
2? 現場環境的感知與測量技術
超高壓直流閥廳套管安裝對安裝環境也有較高要求。為保證安裝環境的溫度與濕度,本系統采用了以下溫度與濕度傳感器,能實時監控現場作業溫度,保障作業安全進行。
對于溫度傳感器,本系統采用基于紅外線熱成像技術的溫度狀態監測攝像機,其與傳統的熱像儀系統相比價格較為便宜。該攝像機里有一個內置報警系統,當它測量到目標超過閾值時,就能發出報警通知,有效避免事故的發生。另外,與接觸儀相比,它的優點是對溫度變化的反應速度非常快。監控實例如圖2所示。
濕度傳感器是測量空氣或其他氣體中的水蒸氣量。濕度并不能單獨說明設備的狀況,但當它的數值發生變化時,它很好地被跟蹤,以指出異常情況。本系統采用一種基于聚酰亞胺和背面腐蝕硅的濕度傳感器,該傳感器能提高傳感器與周圍環境的接觸面積,同時便于氣體通過傳感器,具有響應時間短的特點。
通過上述感知設備,本系統能及時監控環境與各設備的溫度與濕度,使得安裝過程能在溫度20~25℃、濕度小于45%的環境中進行,避免因設備過熱、過載等引發的電氣火災或其他事故,在事前減小故障風險。
3? 機構的受力分析與設計技術
本系統采用第1節中提出的智能安裝平臺進行安裝。為保證安裝過程的安全可靠,需要對其各構件進行受力分析,確定合適的設計參數。
3.1 操作平臺平衡支撐、配重計算及設計
當直流閥廳內部高壓套管智能安裝平臺吊起1750kg套管,升降大臂伸到最長,變幅油缸縮到最短時,并且升降裝置轉到與底盤正常前進方向成90度時,底盤受力狀態最差,根據力矩的計算公式:

式中:F表示作用力,L表示力臂,M是作用力F對轉動軸的力矩。
根據公式(1),計算可得套管端相對支腿的力矩21.42噸米大于底盤端相對支腿的力矩18.13噸米,因此存在傾翻可能,若一定要在此惡劣環境使用,則底盤須加配重1400kg。
經現場勘測,場地限制條件不多,則考慮在操作工程設置位置進行必要的安全保護,在大臂伸出狀態不允許大臂角度降到30度以下,此時公式(1),計算可得套管端相對支腿的力矩16.8噸米小于底盤端相對支腿的力矩18.13噸米,因此,底盤不須加配重也能保證不會傾翻。
3.2 機械臂受力計算及材料選型
初選機械臂壁厚為20mm,當直流閥廳內部高壓套管智能安裝平臺吊起1750kg套管,升降大臂伸到最長,變幅油缸縮到最短時,此時機械臂各部件受力情況最差。設備工作過程中無沖擊,受力模式為靜應力模式。機械臂共分為三段,采用第三強度理論進行計算,公式為
式中:為彎曲應力,為切應力。
根據公式(2),計算可得最小臂極限點受力為3.17MPa,次小臂極限點受力為5.63MPa,大臂極限點受力5.03MPa。
通過比較,得到次小臂受力狀態最差。近似取,代入公式(2)可得為7.96MPa。
按照焊接性能很好,力學性能相對一般的材料Q235A來考慮。Q235A材料許用應力(屈服強度)為235MPa,遠小于。
復合安全系數的計算公式為:
式中:[S]為許用復合安全系數
近似取,可得。起重作業機構許用最小安全系數[S]一般大于5,S遠大于[S]。
可以進行一次優化設計:
選機械臂壁厚為10mm,對次小臂進行核算。
此時,,遠小于。依然大于[S],滿足要求。
綜上,(1)當升降裝置轉到與底盤正常前進方向成90度時,本平臺中的底盤須加配重1400kg;(2)在大臂伸出狀態不允許大臂角度降到30度以下時,本平臺不加配重也能保證不會傾翻;(3)通過對機械臂不同部分的受力進行分析,可選取機械臂壁厚為10mm。
4? 過程三維定位技術
本系統所采用的智能安裝平臺可在閥廳內操作,因此為了能對套管安裝過程進行科學化的精細指導,我們使用了基于LED的可見光通信室內定位系統。這種系統具有以下優勢:(1)與可見光相比,使用無線電波方式的通信更容易受到多徑效應的影響,使用VLC技術可以實現更高的定位精度;(2)只要存在照明基礎設施,就可以普遍提供服務,從而使硬件成本最小化[7]。
LiQinglin等[8]將三維空間劃分為許多二維平面。在每個二維平面中,可以實現各種方位角和角度增益差。根據角度增益的差異,他們提出了一種三維定位算法,實現了3.5cm的平均定位精度。YinLiang等[9]使用與加速度計相關的角度分集發射器進行上行三維定位。WangYuqi等[10]提出了一個共線條件方程模型,并將其使用于三維定位中,實現了分米級的定位誤差。XuYinfan等[11]采用安裝在天花板上的兩個帶多光電二極管的環形接收器來定位攜帶LED的終端,定位誤差低于0.2m。
本系統采用粒子群優化算法(particleswarm
optimization,PSO)進行三維定位系統,為了解決PSO中過早收斂的問題,提高尋找最優解的速度,通過模擬退火(simulatedannealing,SA)算法進行改進PSO是一種強大的基于種群的隨機方法,可以解決全局優化問題[12],而可見光定位問題也可以轉化為全局優化問題[13]。
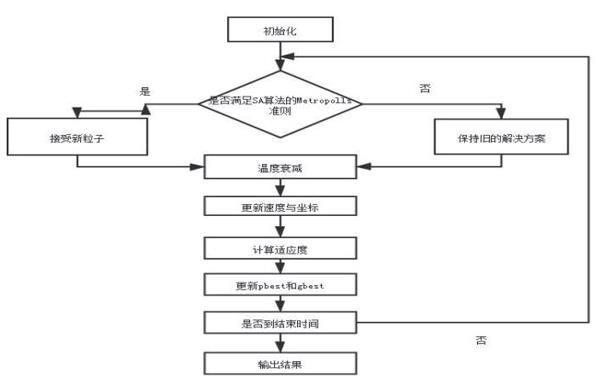
該算法包含如圖3所示的三個步驟。其中gbest表示整個粒子群中三維定位最佳的粒子,pbest表示某個粒子在迭代過程中的最佳三維定位。
Step1.設置初始值;
首先,設定粒子群大小為N,最大迭代數為mmax。給每個粒子一個隨機坐標作為終端在三維定位系統中的初始位置和一個隨機速度,并使用視距(Line-of-Sight,LoS)信道增益的偏差作為適應度函數(因此與通常的定義不同,在本文中適應度越小代表解的性能越好)。
Step2.根據模擬退火更新粒子;
SA的Metropolis準則可由以下公式給出:
式中是第j個粒子的適應度。Tn由如下公式給出:
式中:是衰減參數,n表示迭代時間。如果,則令為新的gbest。p是一個0到1之間的隨機數。
Step3.粒子群優化迭代。
更新每個粒子在每個方向上的速度和坐標,更新適應度、pbest和gbest。
圖3? 面向套管安裝三維定位的改進粒子群優化算法
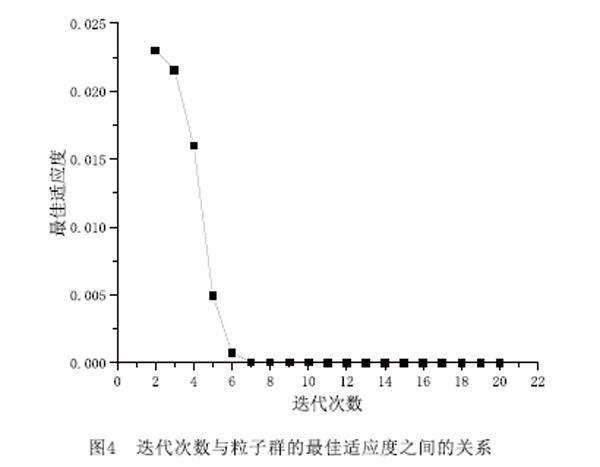
為了評估所提出的算法的性能,我們用一個3m×3m×4m的室內環境模擬直流閥廳的內部空間,并進行了仿真實驗,其中粒子群的大小為200。
圖4? 迭代次數與粒子群的最佳適應度之間的關系
圖4顯示了粒子群的最佳適應度和迭代次數之間的關系,表明了本算法可以達到很高的精度和較快的收斂速度。
5? 移動機器人動態路徑規劃技術
在直流閥廳障礙物固定不變的情況下,智能安裝平臺可以利用傳統A*算法[14]躲避障礙物來運輸套管。但是,現實的直流閥廳的障礙物不是一成不變的,而智能安裝平臺雖然可以利用動態窗口法(DynamicWindowApproach, DWA)[15]躲避動態障礙物,但由于動態窗口法是局部路徑規劃算法,在沒有全局最優路線的引導的情況下,智能安裝平臺很容易陷入局部最優解,而無法達到目的地。
辛煜等[16]提出了一種通過重新定義中心節點的位置,在每個節點的周圍擴大無限可搜索鄰域的算法(以下稱為A*-INF算法)。程傳奇等[17]提出了一種基于A*算法和關鍵點選取策略的算法(以下稱為A*-SS算法)。王洪斌等[18]提出了一種結合預瞄偏差角追蹤法和二次A*的路徑規劃算法(以下稱為A*-QAA算法)。
本系統采用了一種融合A*算法和動態窗口法的全局動態路徑規劃算法(以下稱為DWA*算法),其計算步驟如下。
Step1.利用傳統的A*算法計算出靜態下的全局最優路徑。其中,對于當前節點n,算法要最小化的代價函數為:
式中:g(n)為移動機器人起始節點到達當前節點n的實際代價,為當前節點與目標節點間的歐式距離。
Step2.采樣得到當前的機器人的線速度和角速度。
Step3.依據機器人的實際情況對采樣速度的范圍進行約束。
在速度空間中存在無窮多組,要依據機器人的實際情況對采樣速度的范圍進行約束。
(1)機器人的速度約束為:
(2)機器人電機加減速約束:動態窗口移動時間間隔內,機器人加速度所帶來的最大、最小速度為:
(8)式中:和代表當前速度;和代表機器人最大加速度;和代表機器人最大減速度。
機器人制動距離約束:在局部路徑規劃時為了確保機器人安全,在最大減速度條件要求下,機器人在撞擊障礙物之前速度減為0,即:
式中:是對應軌跡距離障礙物的最近距離。
Step4.結合A*算法與動態窗口算法,設計動態評價函數:
間的方位角偏差。子目標點是機器人靜態規劃下的前進方向上距離當前點最近的靜態環境下的全局最優路徑點。
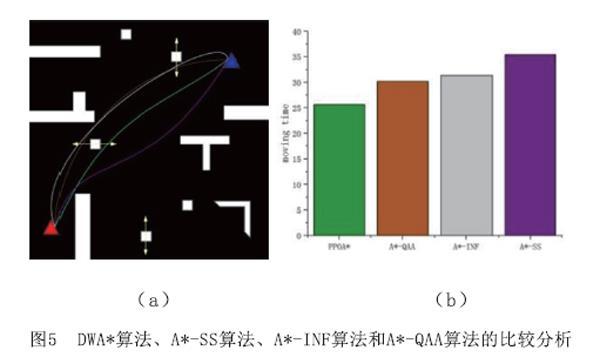
為了驗證本文提出的DWA*算法的有效性,以某電網某輸電公司的直流閥廳中的障礙物實際分布情況為仿真環境,比較了其與類似算法的效率。
結果如圖5所示,綠色軌跡、紫色軌跡、灰色軌跡和棕色軌跡分別由DWA*算法、A*-SS算法、A*-INF算法和A*-QAA算法解出。
(a)中四種算法都成功地找到了無碰撞路徑。如(b)所示,在這四種算法中,提出的DWA*算法找到了行程時間最短的路徑。更具體地說,與第二種的算法相比,它節省了大約15.2%的時間。
經實驗,本系統所采用的融合算法與傳統A*算法相比,路徑更加平滑、具有實時避障的功能;與動態窗口法相比,可以保證全局最優、路徑長度更短。
6? 結語
超高壓直流閥廳套管的安裝是一項難度大、精度要求高、風險高的工程。本文提出了一種智能安裝系統,該系統包括一個智能安裝平臺,以及現場環境的感知與測量、機構的受力分析與設計、過程三維定位、移動機器人動態路徑規劃等四項技術的有機組合,能對套管安裝過程進行全方位的科學指導,能大幅度提高安裝的程序化、規范化、精細化和智能化。
通過上述技術提高套管安裝結果的精度,降低了安裝時間,減少了安裝過程中的碰撞磨損,也能大幅度降低絕緣損壞與老化的風險,有效地消除了電氣火災隱患,從源頭上加強了消防安全管控,預防火災事故發生。
參考文獻:
[1]劉振亞.特高壓直流電氣設備[M].北京:中國電力出版社,2009.
[2]劉振亞.特高壓交直流電網[M].北京:中國電力出版社,2013.
[3]潘國洪,朱華艷.±800kV直流穿墻套管安裝和現場試驗關鍵技術研究[J].高壓電器,2013,49(2):98-102.
[4]陳萬年.葛洲壩換流站500kV高壓直流穿套管的運輸和安裝[J].中國電力,1992,(11):26-28.
[5]李穆,盧文華,向冬冬.輸變電設備智能化運維系統研究與應用[J].電氣工程學報),2015(07):75-81.
[6]Fu M,Song J,Zhao J,et al.Intelligent Operation and
Maintenance of Micro-grid Technology and System Development[J].
In IOP Conference Series Earth and Environmental Science,2018,
108(5):052060-052060.
[7]Gu W,Zhang W,Kavehrad M.Three-dimensional light positioning
algorithm with filtering techniques for indoor environments[J].
Opt.Eng.,2014,53(10):107107–107107.
[8]Q.-L.Li,J.-Y.Wang,H.Ting,W.Yongjin.Three-dimensional indoor visible light positioning system with a single transmitter
and a singletilted receiver[J].Optical Engineering,2016,55
(10): 106103.
[9]L.Yin,X.Wu,H.Haas.Indoor visible light positioning with
angle diversity transmitter[C]//IEEE 82nd Vehicular Technology
Conference,2015,Boston.
[10]Y.Wang,Y.Gong,Z.Shi.Research on the collinear equation model
of visual positioning based on visible light communication[J].
MATEC Web Conferences,2015,22(02003).
[11]Y.Xu,J.Zhao,J.Shi,N.Chi.Reversed three-dimensional
visible light indoor positioning utilizing annular receivers
with multi-photodiodes[J].Sensors (Basel),2016,16(08): 1254.
[12]Van Laarhoven P,Aarts E.Simulated Annealing:Theory and Applications[M].Berlin,Germany:Springer,1988.
[13]Guan W,Wu Y,Xie C,et al.High-precision approach
tolocalization scheme of visible lightcommunication
based on artificial neural networks and modified genetic algorithms[J].Opt.Eng.,2017,56(10):106103-106103.
[14]王殿君.基于改進A*算法的室內移動機器人路徑規劃[J].清華大學學報(自然科學版),2012,52(08):1085-1089.
[15]Fox D,Burgard W,Thrun S.The dynamic window approach to
collision avoidance[J].IEEE Robotics & Automation Magazine,
1997,4(1):23-33.
[16]辛煜,梁華為,杜明博,梅濤,王智靈,江如海.一種可搜索無限個鄰域的改進A*算法[J].機器人,2014,36(05):627-633.
[17]程傳奇,郝向陽,李建勝,張振杰,孫國鵬.融合改進A*算法和動
態窗口法的全局動態路徑規劃[J].西安交通大學學報,2017,51
(11):137-143.
[18]王洪斌,尹鵬衡,鄭維,王紅,左佳鑠.基于改進的A*算法與動態窗口法的移動機器人路徑規劃[J].機器人,2020,42(03):346-353.
Research on intelligent installation system
of EHV DC valve hall bushing installation
Zhang Yuhan1,Wan Shilin1,Lv Gang2,Wang Chun2,Zhong Lin1
(1. Huanan Industrial Technology Research Institute of Zhejiang University,Gangdong Guangzhou 510000;2.CSG EHV Power Transmission Company Guiyang Bureau,Guizhou Guiyang 550000)
Abstract:The EHV DC valve hall bushing has the characteristics of growing equipment length, increasing weight, difficult installation, various installation process control, and fine test requirements. The traditional installation process requires the use of cranes and often relies on the experience and visual inspection of the site personnel. An intelligent installation system is proposed, which includes an intelligent installation platform and an organic combination of four technologies: perception and measurement of the site environment, force analysis and design of the mechanism, three-dimensional positioning of the process and dynamic path planning, which can substantially improve the procedure, standardization, refinement, and intelligence of the installation.
Keywords:EHV DC valve hall; bushing installation; intelligent installation platform; three-dimensional positioning; particle swarm optimization; dynamic path planning
