基于北斗衛(wèi)星通信的航天測(cè)控頻段故障診斷系統(tǒng)設(shè)計(jì)
2021-12-22 13:18:08熊福敏
計(jì)算機(jī)測(cè)量與控制 2021年12期
王 健,熊福敏
(沈陽(yáng)化工大學(xué) 信息工程學(xué)院,沈陽(yáng) 110000)
0 引言
航天測(cè)控系統(tǒng)屬于電子系統(tǒng)工程問(wèn)題,對(duì)于該系統(tǒng)來(lái)說(shuō),應(yīng)先考慮的是航天任務(wù)要求,從地面基站出發(fā),實(shí)現(xiàn)信息獲取,以此確定航天器飛行姿態(tài)[1]。如果某一個(gè)測(cè)控頻段出現(xiàn)故障,就會(huì)影響整個(gè)航天器運(yùn)行狀態(tài)。隨著空間技術(shù)快速發(fā)展,針對(duì)航天測(cè)控頻段可靠性研究日益受到人們重視,尤其對(duì)于航天測(cè)控頻段故障診斷技術(shù)研究成為該領(lǐng)域重要研究?jī)?nèi)容[2]。傳統(tǒng)基于信號(hào)處理的方法受到航天器結(jié)構(gòu)復(fù)雜影響,無(wú)法精準(zhǔn)獲取航天測(cè)控頻段數(shù)據(jù),其動(dòng)態(tài)數(shù)學(xué)模型難以建立,并且實(shí)時(shí)可用檢測(cè)信號(hào)很少,同樣受到外界環(huán)境干擾,診斷結(jié)果不精準(zhǔn)。為了解決上述問(wèn)題,根據(jù)航天測(cè)控頻段層次結(jié)構(gòu),提出了基于北斗衛(wèi)星通信的航天測(cè)控頻段故障診斷系統(tǒng)設(shè)計(jì)。
1 系統(tǒng)總體架構(gòu)設(shè)計(jì)
基于北斗衛(wèi)星通信的航天測(cè)控頻段故障診斷系統(tǒng)總體架構(gòu),如圖1所示。
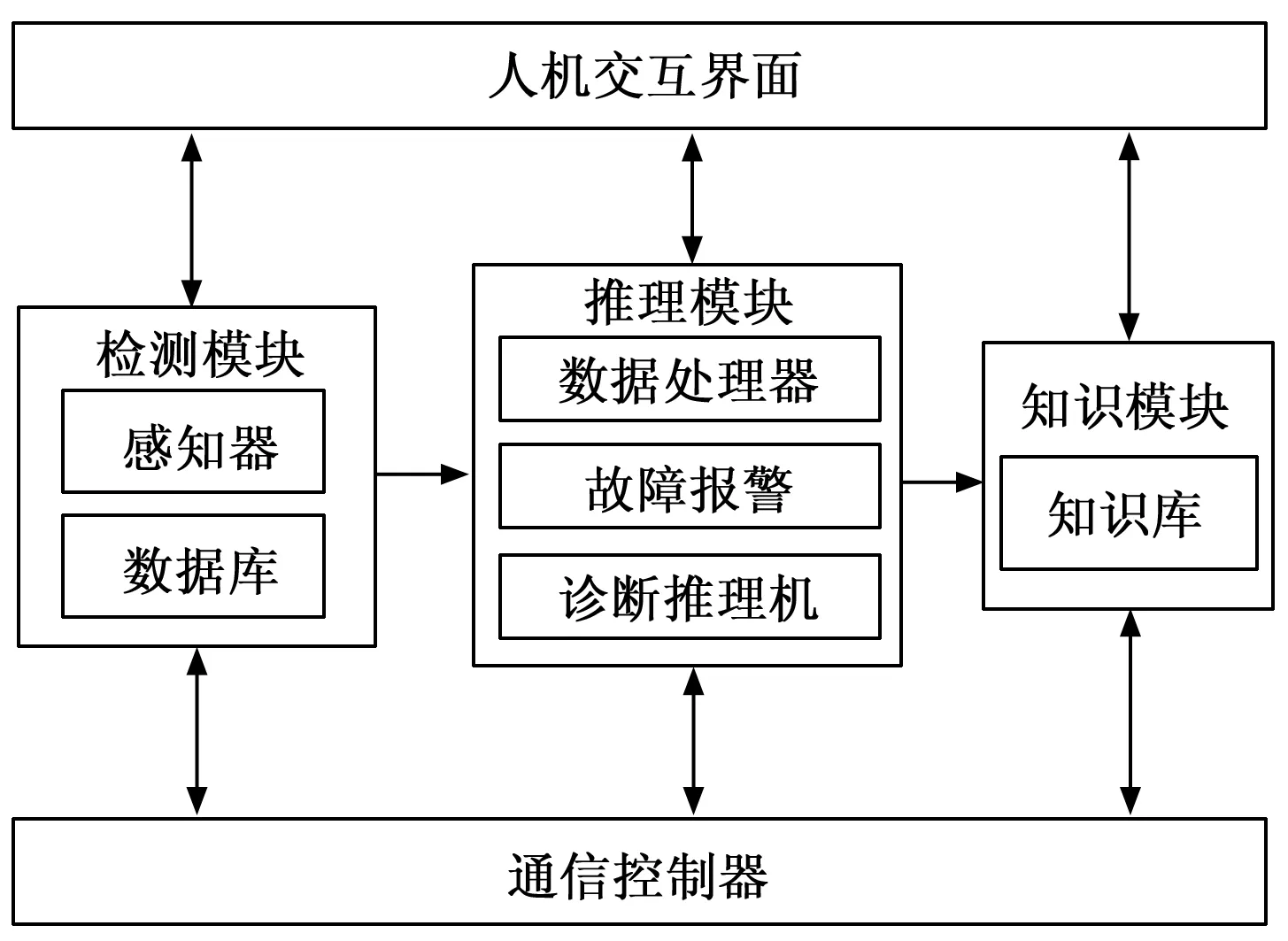
圖1 系統(tǒng)總體架構(gòu)
由圖1可知,該系統(tǒng)采用集中化設(shè)計(jì)結(jié)構(gòu),即由多個(gè)agent組成的集中管理組織,負(fù)責(zé)為各下屬診斷agent提供統(tǒng)一的協(xié)調(diào)管理中心,實(shí)現(xiàn)對(duì)各agent的行為、任務(wù)分配和信息資源共享[3]。
系統(tǒng)主要組成部分主要功能如下:
1)傳感器:傳感器主要負(fù)責(zé)監(jiān)測(cè)航天器的環(huán)境信息和狀態(tài),將監(jiān)測(cè)結(jié)果存儲(chǔ)于數(shù)據(jù)庫(kù)中,可用于故障預(yù)測(cè)與診斷[4]。
2)推理模塊:分析數(shù)據(jù)庫(kù)中的信息數(shù)據(jù),向上級(jí)系統(tǒng)代理發(fā)送故障預(yù)測(cè)結(jié)果和故障狀態(tài)信息;根據(jù)知識(shí)庫(kù)中的經(jīng)驗(yàn)知識(shí)或模型知識(shí)以及傳感器中的信息,由診斷推理機(jī)根據(jù)上級(jí)代理指派的診斷任務(wù)進(jìn)行初步故障診斷[5]。
3)執(zhí)行器:執(zhí)行器主要負(fù)責(zé)重構(gòu)系統(tǒng)接收的指令,并將該指令發(fā)送給通信控制器。
4)HMI接口:通過(guò)人機(jī)交互,將代理工作狀態(tài)的顯示和診斷結(jié)果呈現(xiàn)給代理,并對(duì)各個(gè)模塊進(jìn)行更新。
5)通信控制器:從高級(jí)代理收到的消息被發(fā)送到該代理的相關(guān)模塊,并將各模塊產(chǎn)生的結(jié)果發(fā)送到上級(jí)代理。
2 系統(tǒng)硬件結(jié)構(gòu)
系統(tǒng)硬件結(jié)構(gòu)如圖2所示。
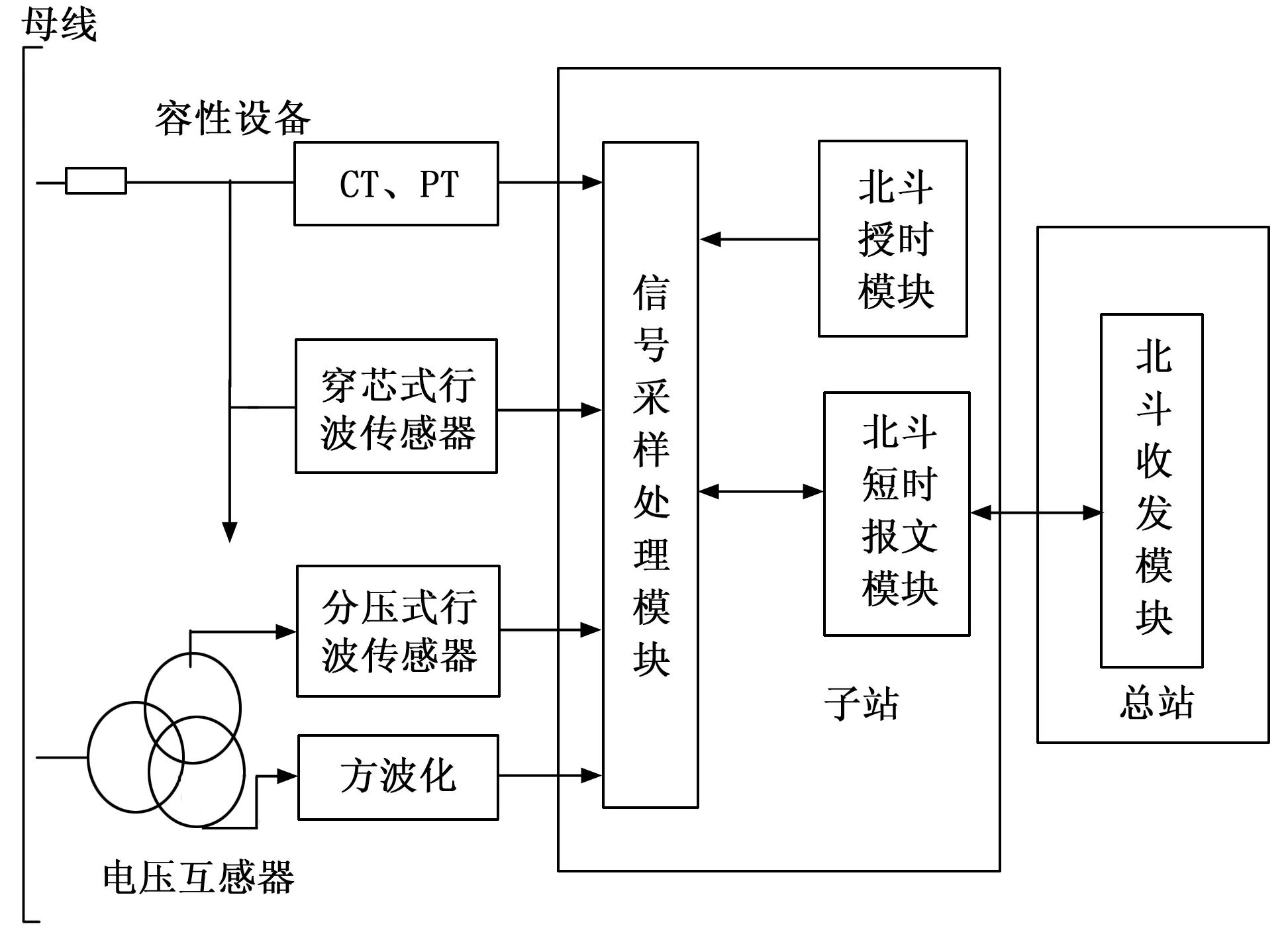
圖2 系統(tǒng)硬件結(jié)構(gòu)
由圖2可知,對(duì) A/D信號(hào)進(jìn)行高速采集,通過(guò)檢測(cè)初始行波頭,避免了高負(fù)載,簡(jiǎn)化了電路結(jié)構(gòu),降低了存儲(chǔ)要求。
2.1 波頭信號(hào)檢測(cè)模塊
波頭信號(hào)檢測(cè)模塊主要是將穿芯式行波傳感器、分壓式行波傳感器接收到的波頭信號(hào)轉(zhuǎn)換為脈沖信息,并將該信號(hào)傳送到信號(hào)處理模塊[6]。該檢測(cè)模塊是由時(shí)間記錄模塊、采樣處理模塊、北斗短信通信模塊、人機(jī)交互模塊組成的,其中時(shí)間記錄模塊主要負(fù)責(zé)記錄行波到達(dá)時(shí)脈沖觸發(fā)的采樣時(shí)間,并利用采樣處理模塊處理接收到的故障信息進(jìn)行故障判斷[7-9]。一旦故障確認(rèn)后,該模塊立刻將信息反饋給主機(jī),主設(shè)備采用雙端法確定故障位置,并及時(shí)反饋到人機(jī)交互界面[10-12]。
2.2 地面接收器
地面接收器接收衛(wèi)星輸出的微弱信號(hào)時(shí),需要經(jīng)過(guò)功率放大、頻率轉(zhuǎn)換、雜波濾波等一系列處理,才能得到所需的數(shù)據(jù)。北斗衛(wèi)星發(fā)出信號(hào)是以最小功率-157.8 dBW和正常功率-146.9 dBW的方式發(fā)送到地面接收機(jī)的,載頻2 491.74 MHz,帶寬8.15 MHz。為確保地面接收機(jī)能準(zhǔn)確采集衛(wèi)星發(fā)射信號(hào),將接收信號(hào)的靈敏度設(shè)置在-145 dBW[13-15]。
2.3 計(jì)數(shù)器
計(jì)數(shù)器主要統(tǒng)計(jì)本振輸出的脈沖數(shù),從而調(diào)整頻率范圍,使之保持在可靠范圍內(nèi)。結(jié)合調(diào)頻估計(jì)下一秒時(shí)域,充分考慮線路老化對(duì)時(shí)鐘脈沖的影響。通過(guò)計(jì)時(shí)器,能夠使衛(wèi)星接收機(jī)輸出時(shí)間完整度得以區(qū)分,提高了系統(tǒng)穩(wěn)定性。時(shí)間-頻率統(tǒng)計(jì)系統(tǒng)將北斗授時(shí)接收機(jī)輸出的1 PPS信號(hào)轉(zhuǎn)換為數(shù)字信號(hào)形式,并由北斗授時(shí)接收機(jī)接收該信號(hào),達(dá)到時(shí)間一致性[16]。若北斗授時(shí)接收機(jī)不能正常工作,則計(jì)數(shù)器將保持原有狀態(tài),避免信號(hào)接收延遲問(wèn)題出現(xiàn)。
2.4 北斗短報(bào)文模塊
短消息通過(guò)衛(wèi)星將其轉(zhuǎn)發(fā)到基站。經(jīng)過(guò)解密和重新加密后,地面站接收到一個(gè)通信請(qǐng)求信號(hào),接收端接收輸出信號(hào),解調(diào)解密輸出信息,通信完成。該模塊下的短消息通信有大約0.5 s傳輸延遲,最大通信頻率是1 s。在安裝了北斗短信模塊之后,終端的短信通信更加高效。北斗短消息通過(guò)北斗衛(wèi)星系統(tǒng)實(shí)現(xiàn)收發(fā)信息功能的同時(shí),也可用于航天測(cè)控頻段的監(jiān)測(cè)。每個(gè)監(jiān)測(cè)點(diǎn)設(shè)置完畢后,北斗短報(bào)文技術(shù)可直接將修改后的數(shù)據(jù)通過(guò)北斗短報(bào)文發(fā)送到中心系統(tǒng),以便計(jì)算后及時(shí)處理突發(fā)故障。
北斗短報(bào)文模塊結(jié)構(gòu)如圖3所示。
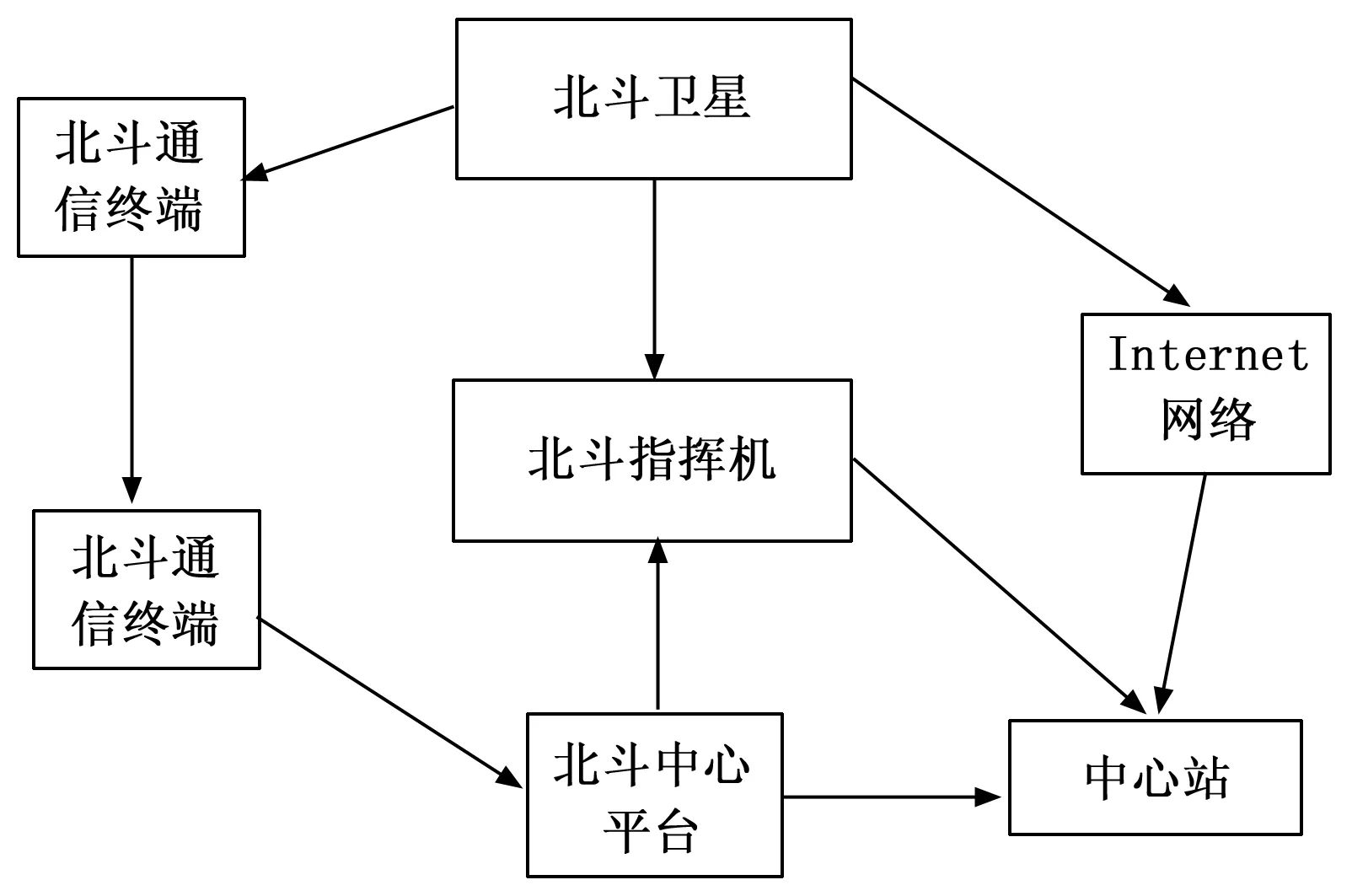
圖3 北斗短報(bào)文模塊結(jié)構(gòu)
由圖3可知,北斗短報(bào)文模塊服務(wù)主要性能指標(biāo)如下:服務(wù)成功率大于等于95%,服務(wù)頻度一般1次/30 s,最高1次/1 s,響應(yīng)時(shí)間小于等于1 s,終端發(fā)射功率小于等于3 W,服務(wù)容量上行為1 200萬(wàn)次/小時(shí),下行為600萬(wàn)次/小時(shí),單次報(bào)文最大長(zhǎng)度為15 000 bit,定位精度可達(dá)95%。
2.5 北斗授時(shí)模塊
根據(jù)使用者與衛(wèi)星通信之間的時(shí)間差,通常至少需要4顆衛(wèi)星來(lái)導(dǎo)航和定位。當(dāng)使用者計(jì)算出來(lái)與衛(wèi)星通信之間的時(shí)間差后,可以通過(guò)北斗授時(shí)模塊修正自己的本地時(shí)鐘,讓它與人造衛(wèi)星的高精度時(shí)鐘同步,這個(gè)過(guò)程叫做定時(shí)。
北斗授時(shí)模塊如圖4所示。
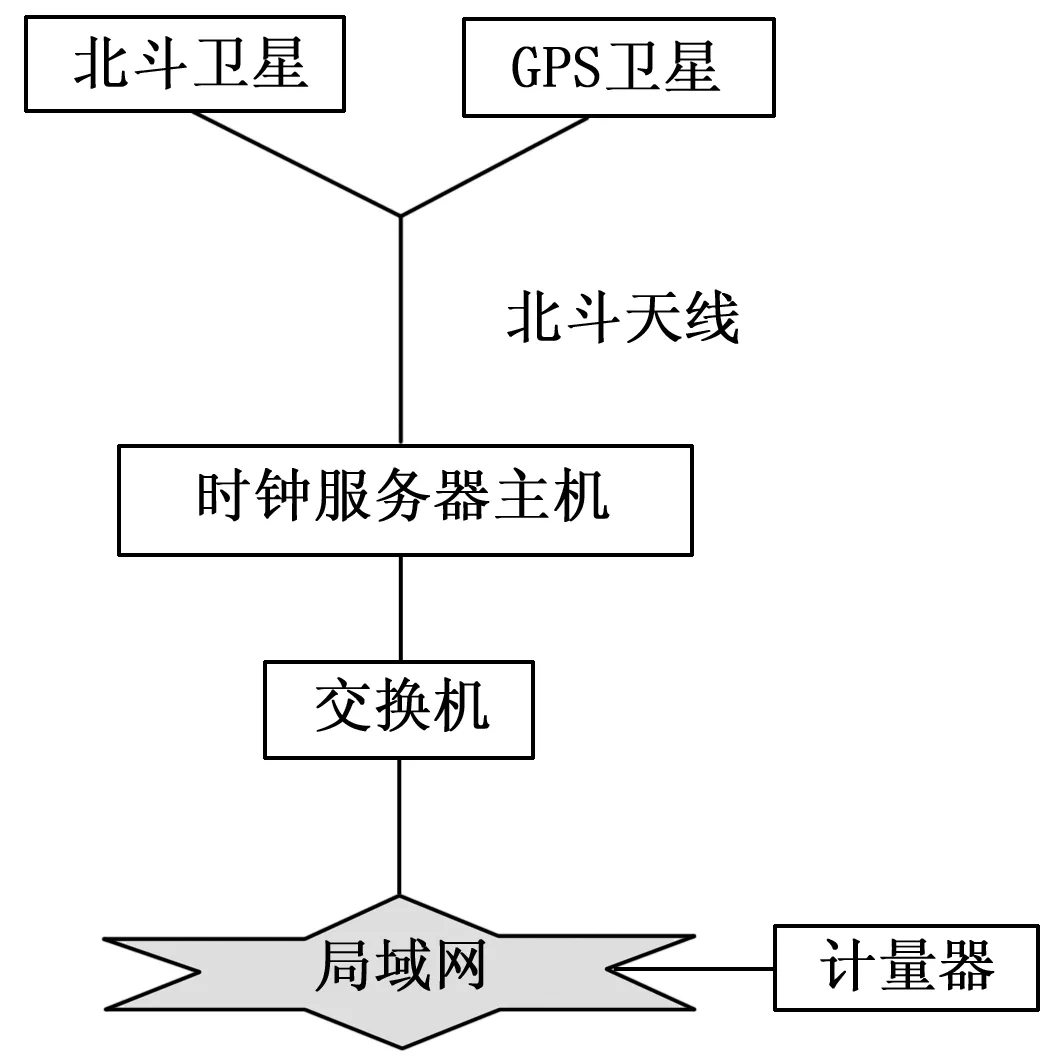
圖4 北斗授時(shí)模塊
由圖4可知,GPS定位系統(tǒng)能夠同時(shí)接收掃射范圍內(nèi)的全部衛(wèi)星信號(hào),將該信號(hào)傳送的時(shí)鐘服務(wù)器主機(jī),通過(guò)主機(jī)記錄信號(hào)接收與處理的時(shí)間。經(jīng)過(guò)時(shí)鐘服務(wù)器主機(jī)處理后,可得到兩種時(shí)間信號(hào),分別是同步脈沖信號(hào)和絕對(duì)時(shí)間信號(hào),兩種信號(hào)同步誤差不會(huì)超過(guò)1 ns。當(dāng)天線安裝好后,只需從衛(wèi)星上接收信號(hào),就能保證輸出的準(zhǔn)確時(shí)間。
3 軟件部分設(shè)計(jì)
3.1 故障診斷流程設(shè)計(jì)
基于北斗衛(wèi)星通信的航天測(cè)控頻段故障診斷系統(tǒng),故障診斷流程如下所示:
步驟1:使用者可直接選擇設(shè)備名稱、型號(hào)及故障類型;
步驟2:基于該方法,用戶可以選擇故障范圍最小的節(jié)點(diǎn),也可以直接提交故障范圍值,從而確定故障發(fā)生的條件;
步驟3:當(dāng)用戶提交一個(gè)節(jié)點(diǎn)和一個(gè)故障特征信息時(shí),系統(tǒng)根據(jù)用戶提供的診斷信息按照搜索策略和故障識(shí)別規(guī)則進(jìn)行匹配,并將匹配結(jié)果輸入到“故障識(shí)別沖突集”中。當(dāng)識(shí)別沖突集為空時(shí),返回步驟2,如非空白,轉(zhuǎn)至步驟4;
步驟4:根據(jù)故障規(guī)則匹配策略,判斷故障類型識(shí)別是否成功,當(dāng)故障類型識(shí)別失敗時(shí),需要修改提交規(guī)則。當(dāng)故障類型識(shí)別成功時(shí),則直接調(diào)用故障類型診斷線程;
步驟5:用戶可以選擇進(jìn)行邏輯推理診斷和系統(tǒng)定位故障類型,獲得精確定位結(jié)果后,按照故障規(guī)則進(jìn)行邏輯推理診斷故障。如果啟用了測(cè)試規(guī)則,則將在錯(cuò)誤對(duì)話框中詢問(wèn)測(cè)試項(xiàng)目,并為該測(cè)試項(xiàng)目提供相關(guān)參數(shù)。如果用戶維護(hù)驗(yàn)證成功,那么診斷維護(hù)記錄按要求歸檔后,診斷工作即結(jié)束;如果用戶維護(hù)驗(yàn)證失敗,那么可參考以前故障類型的診斷和維護(hù)記錄,幫助用戶調(diào)整維護(hù)計(jì)劃。
3.2 基于北斗衛(wèi)星診斷誤差糾正
以秒為基本單位的北斗系統(tǒng)分為單向授時(shí)和雙向授時(shí),該系統(tǒng)是由衛(wèi)星終端、用戶終端和地面控制中心組成的,如圖5所示。
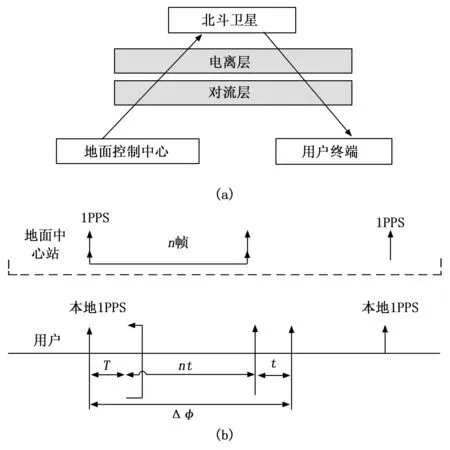
圖5 北斗衛(wèi)星的單向授時(shí)示意圖
如圖5(a)所示,用戶終端與地面控制中心的精確坐標(biāo)信息實(shí)現(xiàn)了單向計(jì)時(shí)過(guò)程中的實(shí)時(shí)交互。然而,接收端需要計(jì)算用戶終端的信息,并且接收端需要計(jì)算并校正傳輸延遲。它的特點(diǎn)是地面控制中心負(fù)責(zé)處理所有信息,因此用戶終端系統(tǒng)的存儲(chǔ)容量較低,位置要求較低[17-18]。
如圖5(b)所示,單方向計(jì)時(shí)方式如下:本地1 PPS為開啟脈沖,用戶接收地面中控系統(tǒng)以其相關(guān)峰值為閉合脈沖的計(jì)時(shí)查詢信號(hào):
Δφ=Δt+nt+γ
(1)
式(1)中,Δt表示控制用戶終端受到外界環(huán)境影響時(shí)信號(hào)接收的時(shí)間差;n表示傳輸次數(shù);t表示控制中心發(fā)送信號(hào)與用戶終端接收信號(hào)所需的時(shí)間;γ表述信號(hào)傳輸延遲。通過(guò)分析報(bào)文中的延遲,用戶終端可以獲得準(zhǔn)確的接收時(shí)間,GPS和北斗系統(tǒng)的時(shí)間誤差不超過(guò)100 ns,可以滿足大多數(shù)單位對(duì)精度的要求。
綜上,基于北斗衛(wèi)星通信的航天測(cè)控頻段故障診斷方法流程如圖6所示。
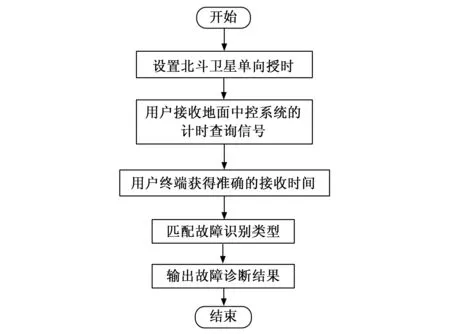
圖6 航天測(cè)控頻段故障診斷流程
根據(jù)圖6可知,航天測(cè)控頻段故障診斷流程為:設(shè)置單向授時(shí)的北斗衛(wèi)星系統(tǒng),用戶能夠接受到來(lái)自地面中控系統(tǒng)的故障信號(hào),通過(guò)單向授時(shí)實(shí)時(shí)獲得準(zhǔn)確的故障信號(hào),并對(duì)故障類型進(jìn)行匹配,輸出配準(zhǔn)的故障類型,即為航天測(cè)控頻段故障診斷結(jié)果。
4 實(shí)驗(yàn)結(jié)果與分析
為了檢測(cè)基于北斗衛(wèi)星通信的航天測(cè)控頻段故障診斷結(jié)果,與傳統(tǒng)診斷方法進(jìn)行對(duì)比,并分析實(shí)驗(yàn)結(jié)果。
4.1 實(shí)驗(yàn)要求及數(shù)據(jù)
航天測(cè)控頻段監(jiān)測(cè)系統(tǒng)的數(shù)據(jù)采集需要專業(yè)、全面的數(shù)據(jù)檢測(cè)。本文系統(tǒng)通過(guò)子系統(tǒng)的控制檢測(cè)和時(shí)空匹配,采集航天器的數(shù)據(jù)通信信息,輔助模擬飛行激勵(lì)系統(tǒng)模擬工作,根據(jù)預(yù)定的采集參數(shù)采集數(shù)據(jù)并存儲(chǔ)。航天測(cè)控頻段數(shù)據(jù)的獲取步驟為:
1)數(shù)據(jù)參數(shù)收集:在航天器的運(yùn)行狀態(tài)下,需要判斷輸入數(shù)據(jù)是否超過(guò)了預(yù)設(shè)的閾值范圍,從而檢查航天器輔助設(shè)備的參數(shù)值是否隨著運(yùn)行狀態(tài)的變化而變化。如果發(fā)生變化,則需要確定航天器的運(yùn)行模式;如果沒(méi)有發(fā)生變化,則需要確定設(shè)備參數(shù)值是否與預(yù)期設(shè)置的參數(shù)值一致。
2)數(shù)據(jù)指令查找:對(duì)數(shù)據(jù)進(jìn)行預(yù)處理和采集,進(jìn)行指令搜索。依據(jù)接收到的數(shù)據(jù)指令進(jìn)行相關(guān)指標(biāo)的搜索,并根據(jù)具體情況決定命令搜索的起點(diǎn)。
3)數(shù)據(jù)通信收集:指令搜索完成后,可以利用搜索結(jié)果對(duì)航天器運(yùn)行過(guò)程進(jìn)行動(dòng)態(tài)監(jiān)測(cè),在探測(cè)期間收集由航天器發(fā)送的數(shù)據(jù)通信信號(hào),并指定飛行時(shí)間的飛行狀態(tài)。
4.2 實(shí)驗(yàn)過(guò)程
為了驗(yàn)證基于北斗衛(wèi)星通信的航天測(cè)控頻段故障診斷系統(tǒng)設(shè)計(jì)合理性,進(jìn)行實(shí)驗(yàn)驗(yàn)證分析。實(shí)驗(yàn)是以航天測(cè)控頻段的雷達(dá)故障為例進(jìn)行研究的,假設(shè)雷達(dá)故障主要原因主要有兩種,分別是信號(hào)線松動(dòng)、陀螺輸出有波紋,接收故障短報(bào)文內(nèi)容的測(cè)控系統(tǒng)如圖7所示。
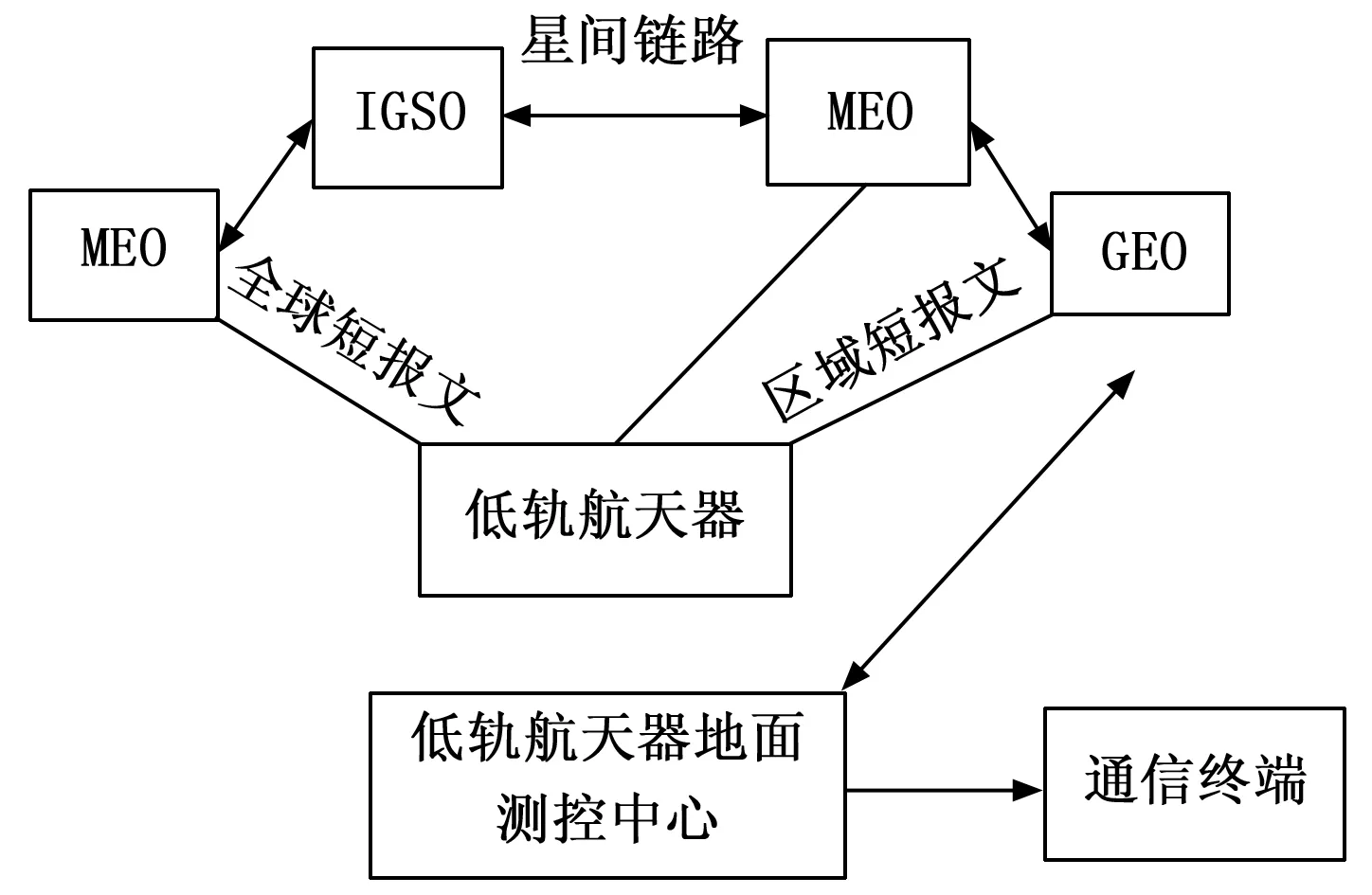
圖7 天基測(cè)控系統(tǒng)
如圖7所示,通過(guò)天基測(cè)控系統(tǒng)接收北斗短報(bào)文,獲取航天測(cè)控頻段故障診斷脈沖信號(hào),分別得到雷達(dá)信號(hào)線松動(dòng)的幅值及陀螺輸出波紋的角度量漂移值,與實(shí)際值相對(duì)比,驗(yàn)證所提方法的有效性,并以解析模型及信號(hào)處理方法作為實(shí)驗(yàn)對(duì)比方法,進(jìn)一步體現(xiàn)所設(shè)計(jì)方法的故障診斷精度。
4.3 實(shí)驗(yàn)結(jié)果與分析
4.3.1 信號(hào)線松動(dòng)
依據(jù)上述情況,分別使用解析模型、信號(hào)處理方法及北斗衛(wèi)星診斷方法診斷信號(hào)線松動(dòng)脈沖,如圖8所示。
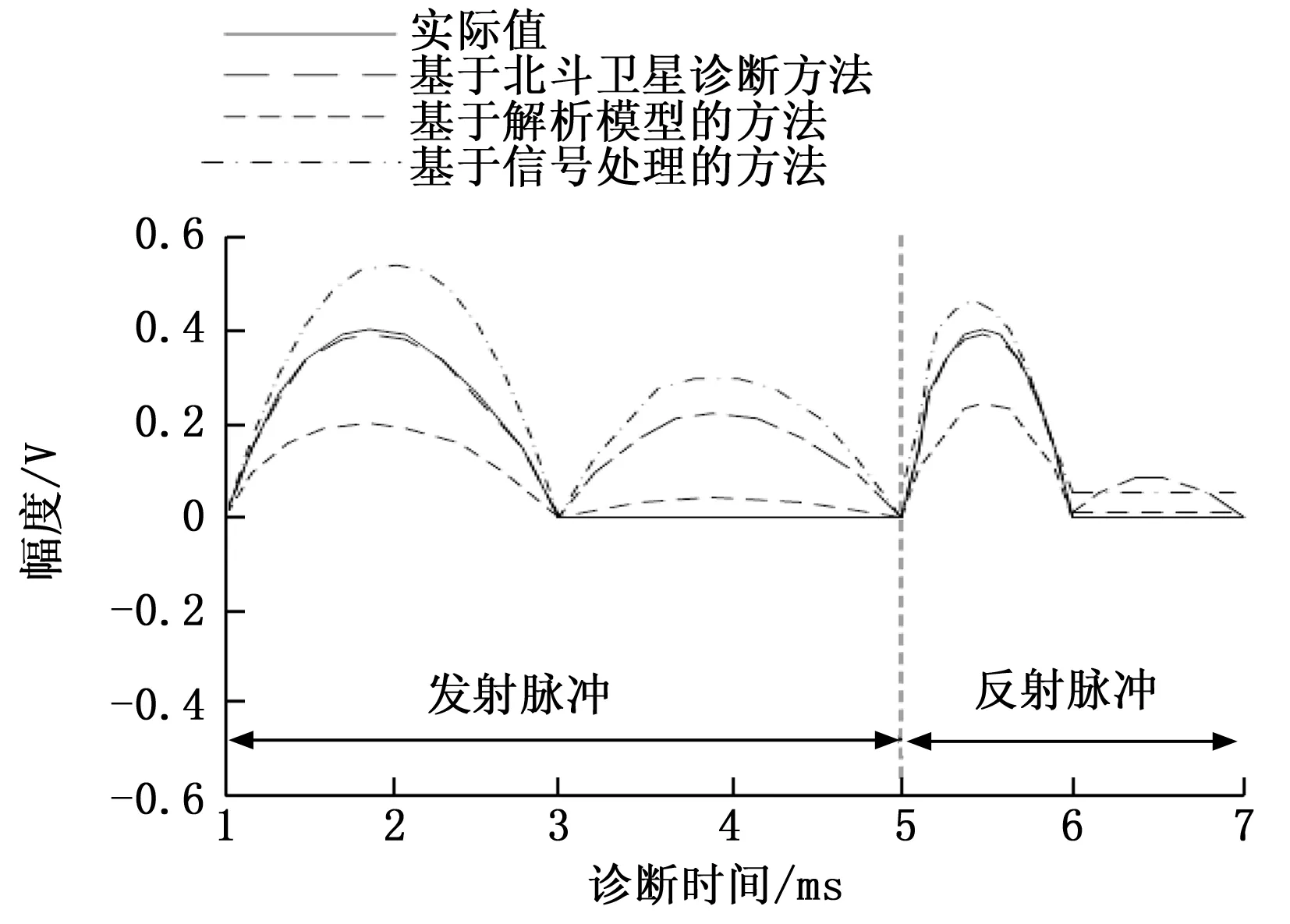
圖8 3種方法信號(hào)線松動(dòng)脈沖信號(hào)診斷結(jié)果對(duì)比分析
4.3.2 陀螺輸出有波紋
使用4種方法的陀螺輸出有波紋診斷結(jié)果,如圖9所示。

圖9 3種方法陀螺輸出有波紋診斷結(jié)果對(duì)比分析
由圖9可知,分別使用傳統(tǒng)的兩種方法角度量漂移與實(shí)際值在0~1 000 ms診斷時(shí)間內(nèi)一致,而在1 000~3 000 ms診斷時(shí)間內(nèi)相差較大;而使用基于北斗衛(wèi)星診斷方法,在診斷時(shí)間內(nèi)角度量漂移與實(shí)際值一致,誤差為0。由此可見(jiàn),基于北斗衛(wèi)星診斷方法的陀螺輸出波紋檢測(cè)結(jié)果與實(shí)際值一致。由于本文方法采用北斗衛(wèi)星通信技術(shù),通過(guò)北斗授時(shí)模塊保證了輸出時(shí)間準(zhǔn)確性,通過(guò)北斗衛(wèi)星診斷技術(shù)糾正了診斷誤差。因此其診斷結(jié)果較為準(zhǔn)確。
5 結(jié)束語(yǔ)
基于北斗衛(wèi)星通信的航天測(cè)控頻段故障診斷系統(tǒng),結(jié)合北斗衛(wèi)星單向時(shí)序故障診斷技術(shù),不僅能快速、準(zhǔn)確地分析故障、定位故障,大大提高故障排除的效率,而且能幫助科技人員找出設(shè)備中的薄弱環(huán)節(jié)。相對(duì)于傳統(tǒng)技術(shù),該系統(tǒng)大大減少了不必要干擾因素,提高了接收數(shù)據(jù)的清晰度,簡(jiǎn)化了操作流程,增加了整體技術(shù)參與度,能夠滿足用戶需求。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21