基于力位協同控制的航天器多路射頻頻譜監測系統設計
2021-12-22 13:18:08王學良
計算機測量與控制 2021年12期
吳 敏,王學良
(中國科學院 微小衛星創新研究院,上海 200120)
0 引言
實時監測多路射頻信號,可以實現對射頻頻譜監測系統的控制,射頻信號在許多領域都得到廣泛應用,例如衛星通信、無線電廣播、航天器控制等領域。力位協同控制是通過將力量信息與位置信息有效融合,使航天器多路射頻驅動結構到達指定位置,實現航天器多路射頻部件之間的完美配合。在航天器多路射頻頻譜監測過程中,力位協同控制是產生運動軌跡、估計調姿誤差、估計調姿機構力位的基礎。在衛星通信系統中,對多路射頻信號的監測,主要監測的內容是射頻信號的傳輸范圍和測量精度,實時監測無線電廣播電視基站對多路射頻信號,主要監測射頻信號的強度以及射頻數據的變化,對射頻信號的監測意義重大[1-2]。
隨著航天器技術的快速發展,基于力位協同控制,射頻信號影響著航天器測試的質量,航天器與地面建立聯系的通信鏈路,其數量隨著射頻信號的增強而增多,通信鏈路越多,航天器與地面測控站的信息交互越頻繁,因此對射頻信號進行有效的監測可以提高航天器與地面測控站的信息交互強度。文獻[3]提出基于開關矩陣的衛星通信測控站多路頻譜監測系統設計,利用接入基帶上行中頻信號,獲取遙控信號頻譜,通過USB接口連接計算機與頻譜分析儀,實現頻譜分析儀實時顯示,基于開關矩陣,采用串行EEPROM器件,內集成總線為雙線串行進行數據傳輸,采用MAX3232芯片實現多路頻譜監測系統軟件流程,實現衛星通信測控站多路頻譜監測系統設計。文獻[4]提出載人航天器與伴隨衛星間射頻系統電磁兼容性分析方法,建立了基于射頻系統收發參數的電磁干擾安全裕度模型,分析了載人航天器接收天線伴隨發射天線所產生的等效干擾。從載人航天器與伴隨衛星的在軌電磁兼容的角度出發,給出了航天器之間兼容工作的最小相對距離計算方法。雖然上述研究取得一定進展,但頻率偏差較大、掃頻和隨機掃頻對射頻頻譜的監測效果較差。為了解決以上出現的問題,設計了基于力位協同控制的航天器多路射頻頻譜監測系統,給出了硬件結構和軟件流程,最后通過實驗研究,驗證了本文系統的工作效果。
1 基于力位協同控制的航天器多路射頻頻譜監測系統硬件設計
基于力位協同控制的航天器多路射頻頻譜監測系統硬件主要由頻譜分析儀、單片機和控制單元三部分組成[5-6]。系統硬件結構如圖1所示。
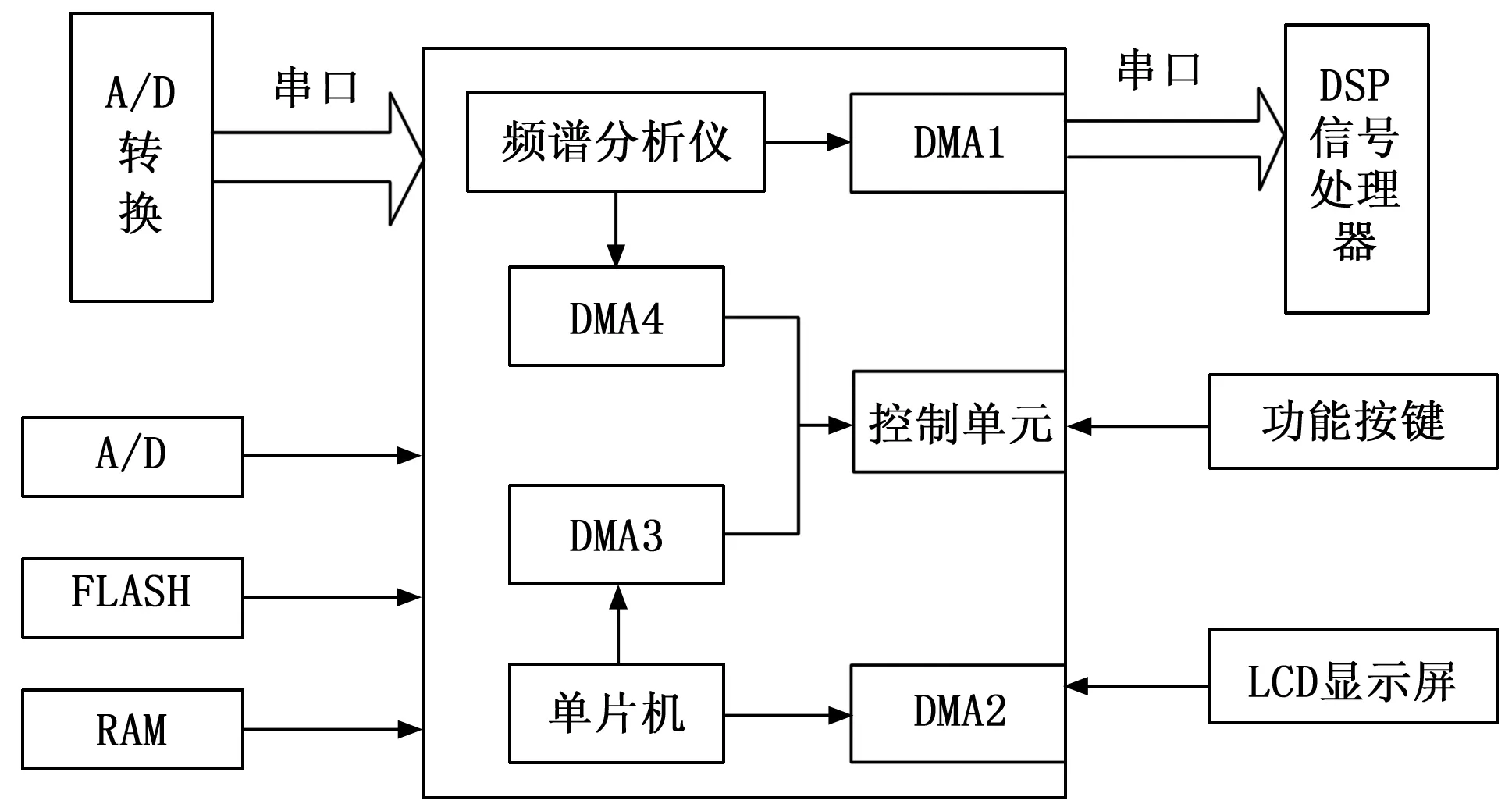
圖1 基于力位協同控制的航天器多路射頻頻譜監測系統硬件結構
1.1 頻譜分析儀設計
基于力位協同控制的航天器多路射頻頻譜監測系統中的頻譜分析儀是本文系統的重要設備,該頻譜分析儀的測量范圍為2~39.88 GHz,屬于頻率覆蓋中頻范圍,在3~4 GHz的頻段上,具有-100 dBm的噪聲電平,分辨率帶寬為5 GHz,可以同時監測4路射頻信號[7]。頻譜分析儀結構如圖2所示。
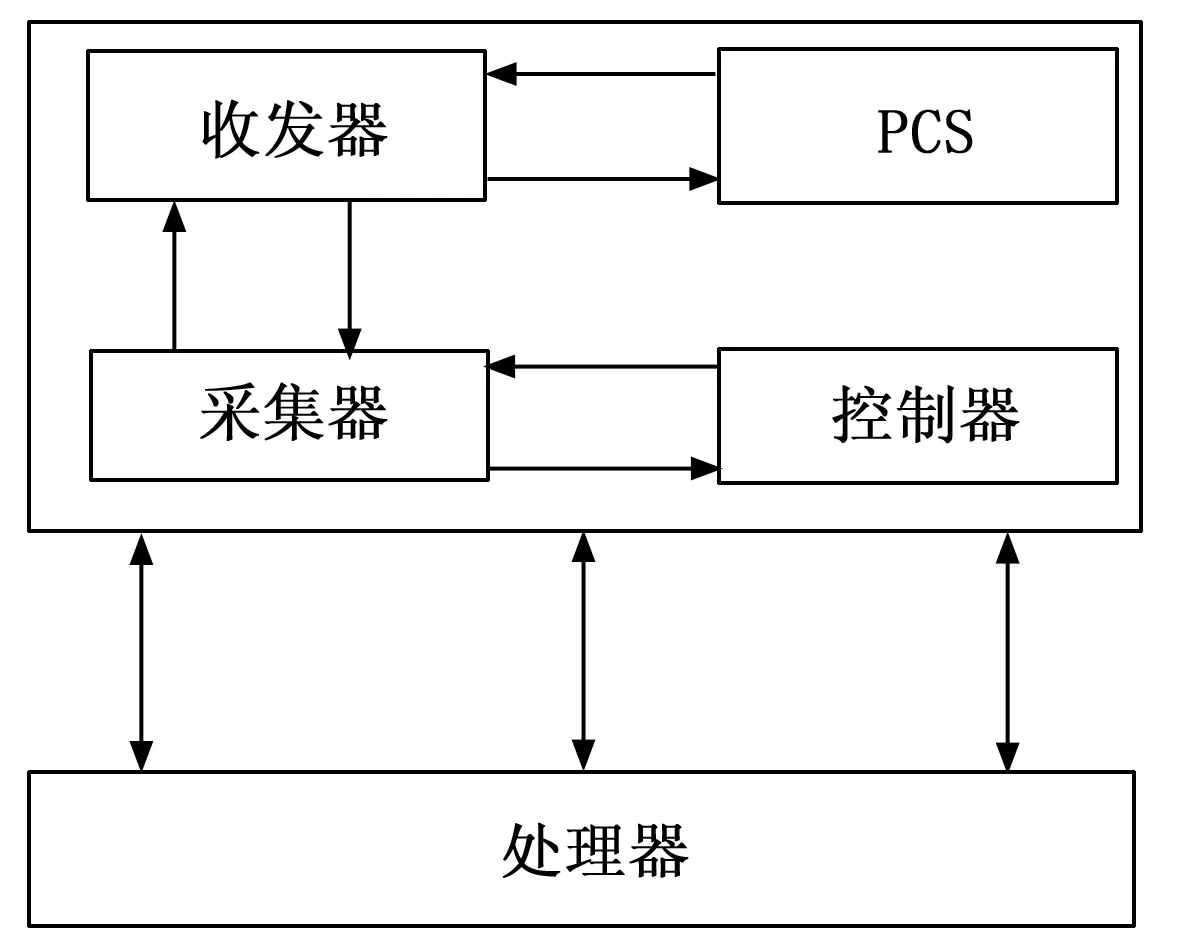
圖2 頻譜分析儀結構
針對頻譜分析儀的控制接口,考慮力位協同控制,可采用其他系列的控制接口,因為頻譜分析儀的控制接口基本上是相同的,因此可以交替進行使用,這樣大大提升了航天器多路射頻頻譜監測系統的通用性[8]。
1.2 單片機設計
基于力位協同控制的航天器多路射頻頻譜監測系統的單片機為監測系統的CPU,該單片機的生產成本較低,具有所占體積較小、使用功耗較低的優勢,是一款性能較好的單片機[9-10],考慮力位協同控制,充分滿足了航天器與地面測控站的信息交互需求。單片機最大工作頻率是72 MHz,內置32 K字節的閃光點、2個計時器、20 K字節 RAM、2個同步串行通訊接口、4個異步串行通訊接口、多個I/O接口和UART接口、6個SPI接口,其內核為ARM16位的8051[11-12]。單片機串口如圖3所示。
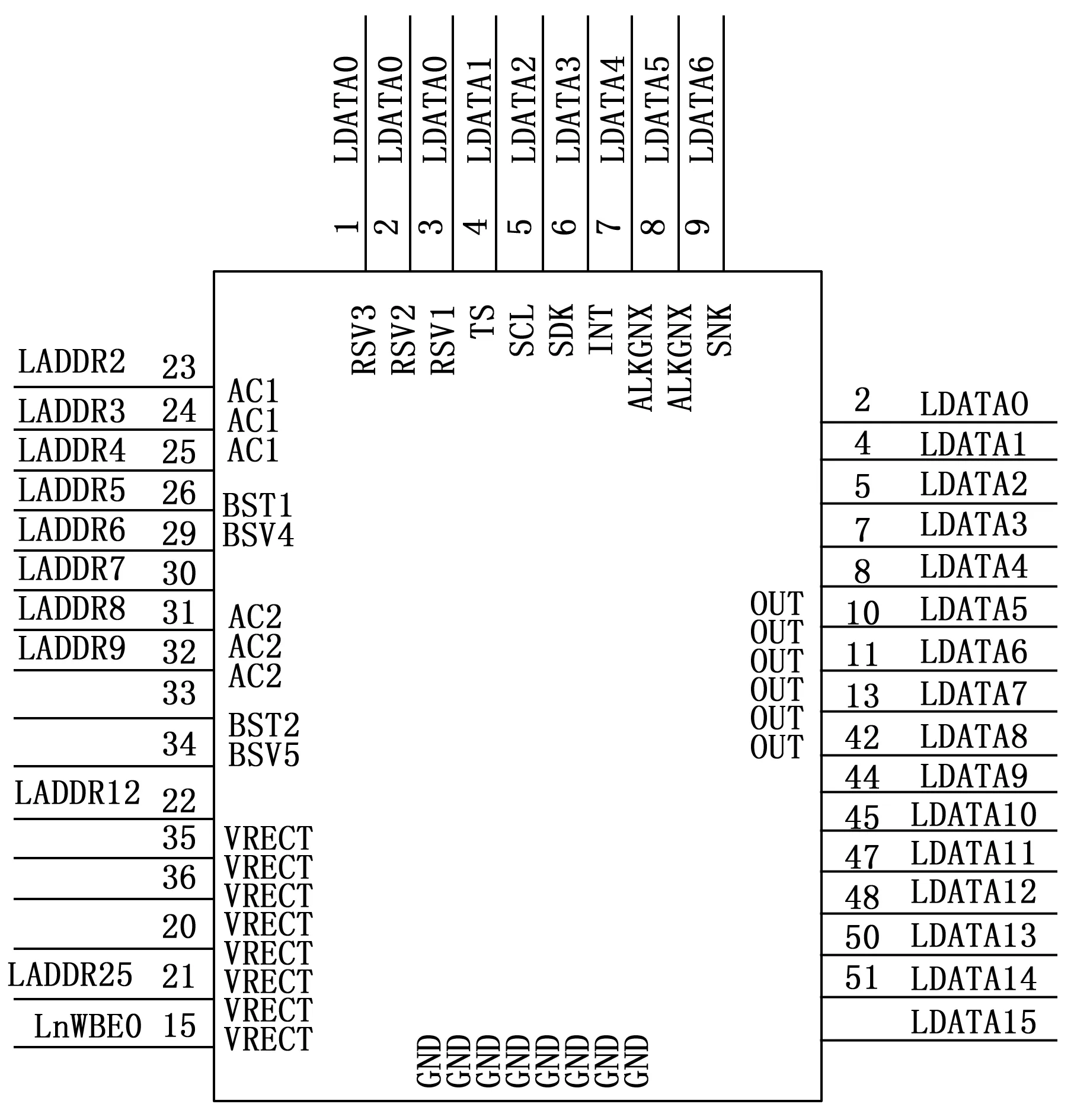
圖3 單片機串口
該單片機還具有1個模數轉換器,轉換時間為2 μs,轉換范圍為0~7.2 V,對航天器射頻頻譜具有保持功能,滿足航天器多路射頻頻譜監測系統對射頻信號的采樣需求,提升了射頻信號的刷新率,實現了對射頻頻譜的監測和控制[13-14]。
監測系統的電路主要為系統提供電源,并進行短路保護、失調電壓的調零,電路選用單電源為系統進行供電,瞬時電壓最高可達12 V,最低電壓為1.8 V,工作電壓為8.5 V,工作電流為3.3 A,由于系統單片機的模數轉換器不能采集負值,因此需要將航天器多路射頻信號進行放大,并添加直流偏置電壓,電壓輸入范圍為0~5 V,電壓采集精度為5 mV。系統電路結構如圖4所示。
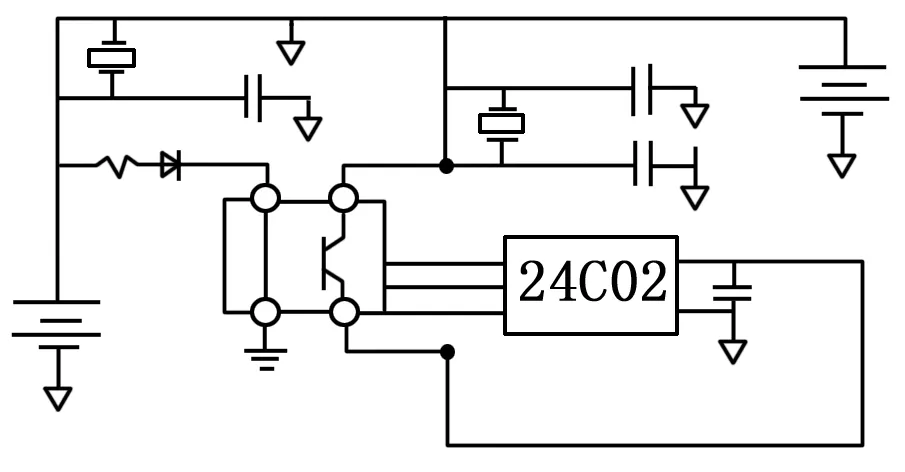
圖4 監測系統電路結構
1.3 控制單元設計
監測系統的控制單元采用TI公司生產的商用PC機,內置雙核CPU,其工作主頻最高可達3.45 GHz,正常工作頻率為2.58 GHz,具有8 GB的內存,可存儲多種射頻頻譜數據,控制單元的內部配置了網卡,可為多路射頻信號的傳輸提供較高的網速[15]。控制單元結構如圖5所示。
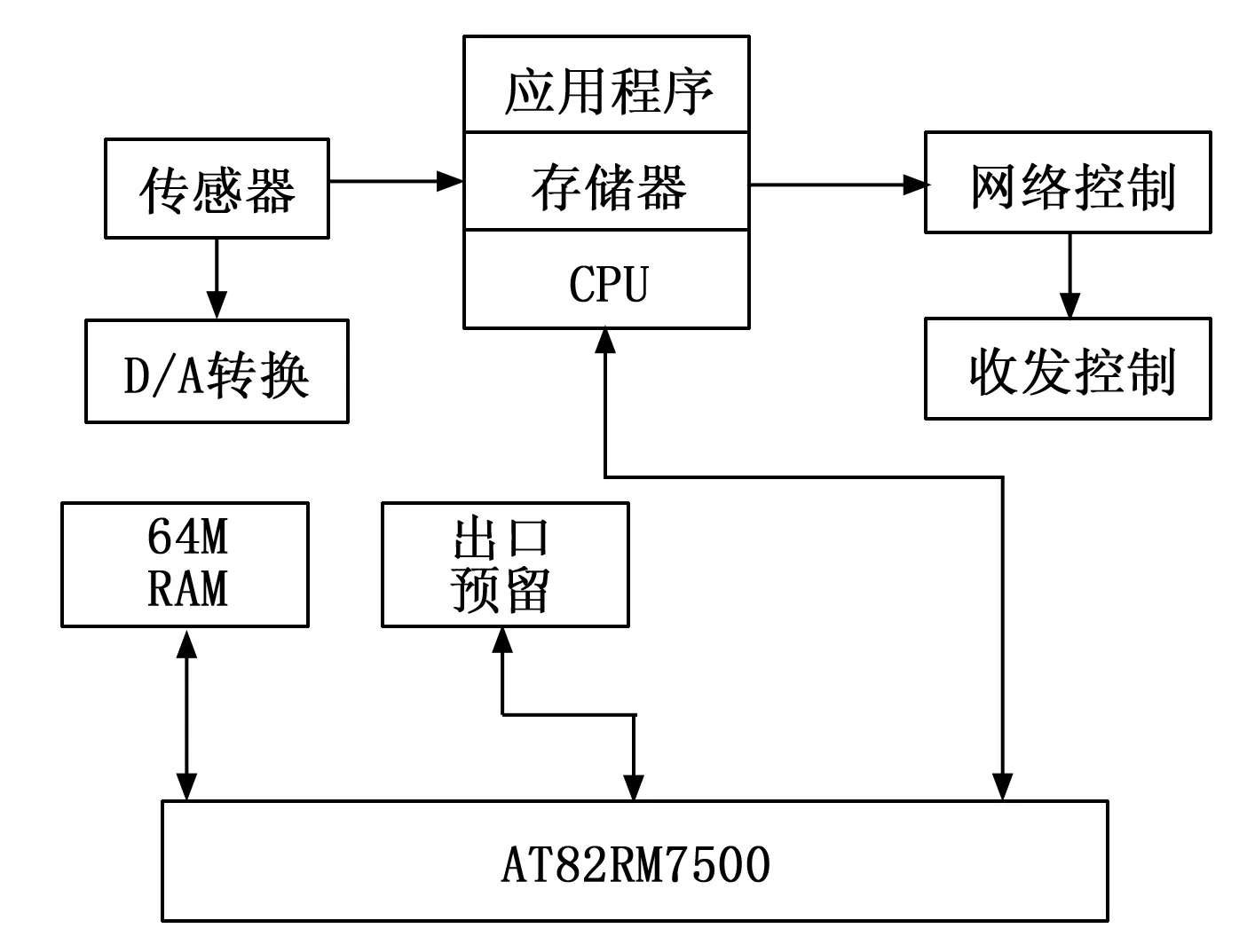
圖5 控制單元結構
控制單元內具有一款成本較低、精度較高的放大器和A/D轉換器,放大器的放大倍數為1~15 000倍,能使單片機內模數轉換器放大多路射頻信號,A/D轉換器屬于16位逐次逼近型轉換器,其轉換速度快,可迅速將多路射頻信號轉換成數字信號,以方便航天器與地面測控站進行信息交互,以保證多路射頻信號通過各種接口進行傳輸,控制單元主要實現對監測系統中頻譜分析儀和單片機的控制,以及對多路射頻頻譜進行監測[16]。
2 基于力位協同控制的航天器多路射頻頻譜監測系統軟件設計
基于力位協同控制的航天器多路射頻頻譜監測系統軟件流程如圖6所示。
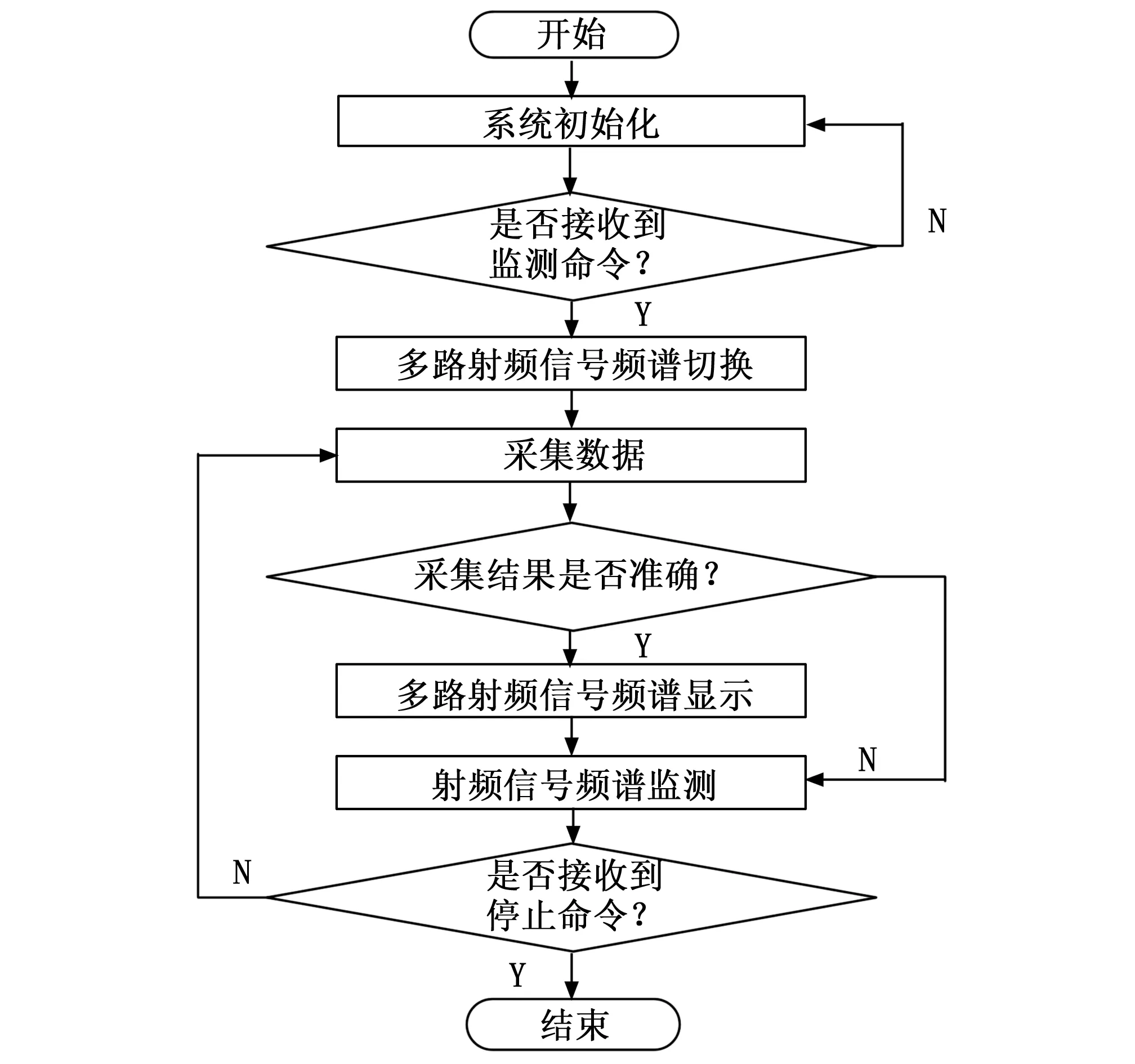
圖6 基于力位協同控制的航天器多路射頻頻譜監測系統軟件流程
首先,對多路射頻信號的頻譜進行切換。頻譜分析儀和監測軟件建立連接后,頻譜分析儀識別控制命令庫中的控制命令,并向系統發送控制命令,搜索命令庫中的頻譜切換命令,轉換成程序語言。通過程序語言向航天器提供控制接口,在頻譜分析儀上設置射頻信號的頻譜帶寬參數,將頻譜帶寬參數代入頻譜程序語言內,同時基于力位協同控制,將頻譜切換命令封裝成功能函數,通過功能函數判斷頻譜帶寬參數是否超出了頻譜分析儀的限定范圍,若超出限定范圍,則構建射頻信號控制命令,對射頻信號控制命令的長度以及頻譜帶寬參數進行初始化,若未超出頻譜分析儀的限定范圍,則根據頻譜切換命令對多路射頻信號的頻譜進行切換[17-18]。
然后,顯示多路射頻信號的頻譜。對多路射頻信號的頻譜切換完畢后,為了實時顯示切換后的頻譜,需要向頻譜分析儀發送控制命令,頻譜分析儀接收控制命令后,保存當前切換的多路射頻信號的頻譜圖像。保存完成后,通過無線通信傳輸系統將保存的頻譜圖像發送至頻譜監測系統,監測系統接收頻譜圖像后,將其以GIF文件格式進行存儲。考慮力位協同控制,監測系統的控制單元通過查詢控制命令找到監測系統存儲的頻譜圖像文件,并以堆方式讀取頻譜圖像文件,讀取完畢后將其臨時存儲到流對象指針內,頻譜分析儀通過頻譜切換過程中創建的功能函數對頻譜圖像進行初始化,通過控制單元調用功能函數中的射頻信號響應函數,調用完畢后按照刷新控制命令刷新頻譜圖像所在的內存區域,并將刷新信息定時發送出去,功能函數對發送出去的刷新消息進行及時響應,頻譜分析儀得到響應消息后,發送頻譜圖像顯示控制命令,監測系統接收頻譜圖像顯示的控制命令后,顯示多路射頻信號的頻譜圖像[19-20]。
最后,對射頻信號的頻譜進行監測。多路射頻信號的頻譜顯示完畢后,需要對其進行實時監測,在監測時,需要讀寫每路射頻信號的測量數據,測量每路射頻信號的頻譜帶寬、顯示電平、中心頻率等參數;測量完畢后,對測量的射頻信號的數據狀態進行監測,根據監測通道的類別對射頻信號的頻譜進行輪巡監測。
3 實驗結果與分析
為了驗證本文設計的基于力位協同控制的航天器多路射頻頻譜監測系統的實際工作效果,將基于動態頻率選擇技術的航天器射頻頻譜監測系統與本文系統進行對比實驗。實驗的相關參數為:頻譜更新的時間間隔為2 ms,每個射頻信號的頻譜分辨率設置為20 dBm,輸入功率在-30~-10 dBm動態范圍內,輸入頻率范圍為5~50 GHz,為保證實驗結果的有效性和嚴謹性,其他實驗條件均相同。
基于以上設置的實驗參數,首先針對不同系統的頻率偏差進行實驗。將多路射頻信號的頻譜輸入到頻譜分析儀中,切換微波開關矩陣,多次測量在不同的頻率范圍內多路射頻信號的頻譜偏移量,利用監測系統中的場放設備收集頻率數據,為了獲得精度較高的頻率偏差,需要多采集不同頻率下的頻偏值,并對頻率數據和多路射頻信號進行擬合,擬合后的頻偏量和不同頻率下的頻偏差值可反映監測系統的頻率偏差情況,頻率偏差越高,系統對航天器多路射頻頻譜的監測效果越差,頻率偏差越低,監測效果越好,本文設計的基于力位協同控制的航天器多路射頻頻譜監測系統對比結果如圖7所示。
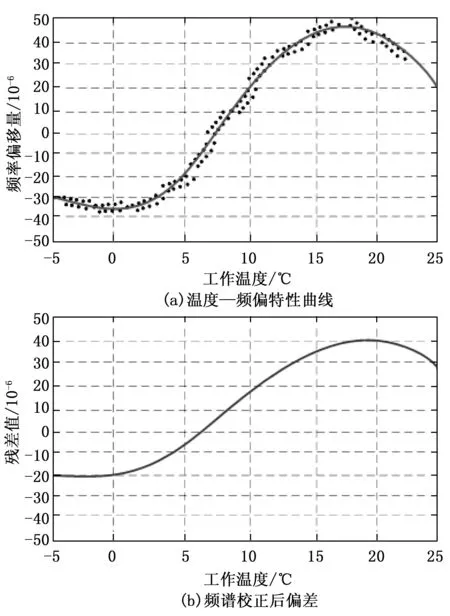
圖7 頻譜偏置校正圖
通過圖7可以看出,通過對實驗結果進行分析,本文系統的頻率偏差較低,頻譜校正后偏差與溫度—頻偏特性曲線基本一致。由此驗證了本文系統的頻率偏差監測效更好。針對監測系統中掃頻和隨機掃頻對多路射頻帶寬頻譜的監測效果進行對比實驗,監測結果如圖8所示。
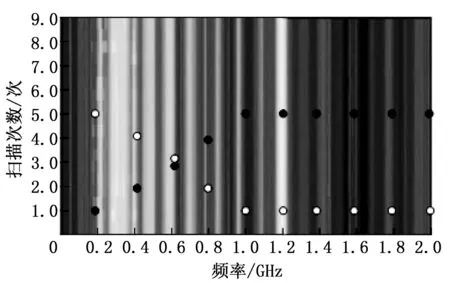
圖8 帶寬頻譜監測結果
由圖8可知,采用頻譜分析儀分析監測并保存250 s的多路射頻信號,利用掃頻和隨機掃頻對多路射頻數據進行離線操作,由于多路射頻信號中的下行鏈路信號較為穩定,且下行鏈路信號的傳輸信道變化較小,在利用掃頻進行離線操作時,設置掃頻的采樣時間間隔為25 s,對下行鏈路信號頻譜的采樣只需要6次即可,隨機掃頻的采樣時間間隔設置為12.5 s,需要進行12次采樣。對于多路射頻信號中的時變信號,其傳輸速度較快,且頻率變化范圍較大,不容易捕捉時變信號頻譜的變化,因此采用掃頻對時變信號頻譜進行采樣的時間間隔為30 s,采樣次數為5次,隨機掃頻對時變信號頻譜的采樣時間間隔為50 s,采樣次數為3次,采樣完成后統計掃頻和隨機掃頻的頻譜采樣數值,兩種監測系統的掃頻和隨機掃頻的頻譜監測結果如圖9所示。

圖9 掃頻和隨機掃頻頻譜監測結果
由圖9可知,對于多路射頻信號中下行鏈路信號的頻譜監測,本文系統中掃頻和隨機掃頻的頻譜監測數值較高;對于多路射頻信號中時變信號的頻譜監測,本文設計的基于力位協同控制的航天器多路射頻頻譜監測系統中,掃頻和隨機掃頻對時變信號頻譜的監測數值較高。由此可見,本文系統的掃頻和隨機掃頻可以很好地完成頻譜監測。
綜上所述,本文設計的基于力位協同控制的航天器多路射頻頻譜監測系統的頻率偏差更低,掃頻和隨機掃頻對多路射頻頻譜的監測效果更好。
4 結束語
為了解決以往航天器射頻頻譜監測系統出現的:頻率偏差較高、掃頻和隨機掃頻的頻譜監測效果差等問題,本文設計了基于力位協同控制的航天器多路射頻頻譜監測系統,該系統硬件方面設計了頻譜分析儀、單片機、電路、控制單元,完成了對多路射頻頻譜的采樣、切換和控制,軟件方面給出了軟件流程,最后通過實驗研究驗證了本文系統具有更低的頻率偏差,多路射頻頻譜的監測效果更好。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25