基于聲光陣列的炸高測量技術研究
2021-12-22 13:18:42宋玉貴
計算機測量與控制 2021年12期
王 永,宋玉貴
(西安工業大學 光電工程學院,西安 710021)
0 引言
炸高測量是現代武器效能評估的重要內容,如末敏彈、槍榴彈和空爆彈的炸高,就是衡量該類武器性能的重要指標之一。國內采用的炸高測量方法主要有CCD交匯測量法[1]、衛星雷達測量法[2]和大視場電視經緯儀測量法[3-4],此類測量方法雖然測試精度較高,但是測量原理非常復雜,成本高昂,只局限于特定的的武器系統,而且測量時受氣象和電子干擾的影響較嚴重。利用測量爆炸聲源到聲傳感器的到達時間差[5-8]( TDOA, time difference of arrival)來確定炸點的位置,不僅可以快速確定炸點位置,而且極大地降低了成本、提高了定位精度,同時還具有隱蔽性。研究基于無源被動式探測原理的空中炸點定位算法具有較好的理論意義以及很高的實際應用價值。張曉光[9]等人提出一種基于四元十字麥克風陣聲源定位系統,該系統的定位坐標偏差在7%之內,應用在炸高測量上無法滿足要求。王洋[10]等人提出的3個五元十字陣列的彈丸落點定位滿足靶場對彈丸落點的全域定位精度要求,其結構較復雜,布局比較繁瑣,導致對測量距離要求比較高,并且只是在理想環境下進行的仿真實驗。
目前,應用于靶場炸高測量的的探測方式主要分為有源主動式定位和無源被動式定位兩種[11-12];其中,有源式主動式定位技術是通過發射高功率的信號波來實現定位,定位精度較差。而無源被動式定位系統是通過采集目標本身發射的聲光等信號來實現定位,不需要跟蹤武器彈藥的飛行軌跡,也不受被測目標特性以及電子干擾等影響,定位精度高。當然,基于無源被動式定位的聲學測量技術也有需要改進的地方。例如,使用單基陣麥克風陣列無法精確測量炸點高度,采用多基陣測量炸點高度時,結構比較復雜,布陣繁瑣費時,并且需要進行數據融合,增加了計算量。
針對上述問題,本文提出一種基于立體六元聲光陣列的新型炸高測量系統,引入改進的廣義二次互相關時延估計算法可以在低信噪比下準確獲取TDOA,并根據列出的數學模型計算聲源的高度,實驗結果表明,該設計可以實現單基陣測量炸高,并有效提高了時延估計的精度與抗噪性能。
1 立體六元聲光陣列定位原理
聲源定位系統根據測量目標的不同要求采用不同的定位模型。當聲源信號在二維平面上時,只需確定目標在二維空間上的信息,當聲源信號在三維空間上時,就需要使用比較復雜的立體定位模型來確定聲源的位置[13]。由數學原理可知,若要在三維空間里確定一個點,至少需要3個距離差,4個觀測點。
本文主要研究遠場三維空間中的炸高測量,提出了一種立體六元聲光陣列測量結構,如圖1所示,該結構由一個聲光組合傳感器(ML)和5個聲傳感器(Mic1-Mic5)組成,其中,光傳感器位于坐標原點處,聲傳感器分別位于坐標軸上,且距離原點距離為d。設待測炸點S的坐標為(x,y,z),到聲光組合傳感器件ML的距離為r,到聲傳感器Mic1-Mic5的距離分別記為r1、r2、r3、r4、r5。
圖1 立體六元聲光陣列模型
根據聲波到達各個聲傳感器的時延差可以列出以下方程組:
(1)
ri-r1=τ1iC,(i=2,3,4,5)
(2)
聲波在空氣中傳播時,聲速C與環境溫度T、壓強P的關系為:
(3)
式中,τ1i表示聲源信號到Mic1和Mici之間的時延差,Pw為相對濕度與對應溫度飽和蒸汽壓的乘積。
聯立式(1)、(2)可得:
(4)
(5)
(6)
炸點位置的俯仰角θ為:
(7)
炸點到光傳感器的距離r為:
(8)
最終計算的炸點高度h為:
h=r· sinθ+b0=
(9)
式中,△t為聲光信號到達基陣的時延值,V表示光在空氣中傳播的速度,b0為基陣原點到地面的距離。
2 聲光陣列測量炸高誤差分析
由第一節的數學模型可知,炸點位于基陣中心的的俯仰角θ與時延估計值τ1i有關,通過測量爆炸火光與爆炸聲音到達測量基陣的時延差△t以及空氣中的聲速C便可以算出炸點距離r。最終通過公式(9)可以算出炸點高度h。因此,影響聲光陣列炸高測量精度的主要因素為時延τ1i、爆炸聲光信號到達基陣的時延估計值△t和空氣中的聲速C。
使用Matlab軟件[14]仿真炸點位于陣元中心的俯仰角θ受陣元間距d以及時延τ1i的影響程度。仿真過程中取測試環境中的聲速為340 m/s,炸點分布范圍為200 m *200 m *100 m;由于信號采集卡的分辨率固定,為了保證時延估計的有效性,陣元間距不宜過小,但若陣元間距過大,會對系統的便捷性和可實現性產生一定的影響,故仿真時選取的陣元間距在0.6~3 m范圍內,引入時延估計誤差,采用蒙特卡洛[15]方式,進行300次重復試驗,最終獲得在不同陣元間距下,時延估計誤差導致的炸點俯仰角誤差,結果如圖2所示。
圖2 不同陣元間距下時延估計誤差導致的俯仰角誤差
采用上述同樣的方法進行150次仿真試驗,圖3是炸點的平面位置分別在(10 m,10 m)、(50 m,50 m)和(100 m,100 m)處的炸點距離相對誤差與炸點高度的關系。
圖3 炸點距離相對誤差與目標距離之間的關系
由圖3可知,炸點平面位置為(5 m,5 m)、(50 m,50 m)和(100 m,100 m)時,離地距離較近的區域距離誤差較大,誤差波動較大,隨著炸點高度的增加,距離誤差逐漸減小,在高度為30 m時誤差最小,誤差波動較穩定;不同平面位置的炸點在25~60 m高度處的距離誤差小于4%,誤差相對較小。
圖4為炸點位置到測量基陣原點的距離r受聲速變化及爆炸聲光信號到達基陣的時延估計值Δt誤差的影響圖。
圖4 炸點距離誤差與聲速變化和聲光信號時延估計誤差的關系
由圖4得,炸點距離誤差與聲速變化和聲光信號時延估計誤差呈正比,聲速變化為20 m/s時導致得炸點距離誤差不大于0.5 m,對炸點距離的影響較小;聲光信號時延估計誤差為12 ms時導致的炸點距離誤差范圍為3.8 m附近,對炸點距離影響較大。因此測量炸點距離時應該盡可能減小聲光信號時延估計誤差。
綜上分析,本文所提測試方法適用于高度范圍為25~50 m的炸高測量,最佳測量聲信號延估計誤差絕對值不高于20 μs,聲光信號到達基陣時延估計誤差不高于4 ms;為了確保聲光陣列炸高測量的精確度,陣元間距不應小于2 m。時延估計精度取決于時延估計算法的性能,聲光信號到達基陣時延估計誤差的精度取決于硬件電路(本文暫不討論)。
3 時延估計算法
在聲信號處理放大電路性能完全一樣的情況下,時延估計算法性能決定了時延估計的準確率。在眾多的時延估計算法中,通過廣義互相關算法[16-19](GCC, generalized cross correlation)分析的時延估計原理最簡單,運算量小、易于實現,實際應用最為廣泛。文獻[20]提出相位變換加權廣義互相關算法(GCC-PHAT)對于寬帶準周期的語音信號,相關峰尖銳,時延估計效果最好,但隨著信噪比的下降,估計性能下降很快。除此之外,在對兩路信號進行廣義互相關計算時應用的快速傅里葉變換(FFT,fast fourier transform)存在柵欄效應, 降低了頻譜的精度,得到的時延值總是采樣間隔的整數倍,時延估計精度為TS/2[21],反應不出精確的信號的頻譜特性。
采用MCZT(MCZT,modified chirp z transform)算法代替FFT計算音頻信號細化的頻譜,不僅可以提高頻譜分辨率,而且可以降低干擾噪聲的影響,通過計算兩信號的自功率譜、互功率譜以及二次互功率譜,采用相關峰精確插值[22-24]( FICP, fine interpolation of correlation peak)對二次互功率譜進行補零來提高頻域采樣率,提高時域相關函數的分辨率,接著對二次互相關函數做歸一化運算和指數運算,使得峰值突出,易于讀取峰值,經過峰值檢測最終得到時延估計值。算法流程如圖5所示。
高分方案數代表來自外部評價指標的設計師產出質量(本實驗采用外部專家組評價每一款方案),被引用次數則代表設計師的作品在團隊內部的認可度。內外兩個指標結合起來可以作為設計師產出質量的一個較全面的表征。

圖5 改進的廣義二次互相關算法流程
圖5中虛框內的公式可表示為:
(10)

假設兩個聲傳感器接收到的聲信號的時域序列分別為x1(n)和x2(n),用MCZT變換分別計算兩路信號的細化頻譜X1(k)和X2(k),接著計算其自功率譜R11(k)和互功率譜R12(k)。
(11)
式中,k=0,1,…,N-1。
自功率譜R11(k)為:

(12)
互功率譜R12(k)為:
R12(k)=X1(k)X*2(k)
(13)
二次相關處理可以進一步減少噪聲的影響,提高信噪比,其互譜為:
R(k)=φ12(k)R11(k)R*12(k)
(14)
其中:φ12(k)是加權函數,該算法采用的加權函數為改進的ECKART加權函數,表達式為:
(15)
由于使用ECKART加權函數時需要預先知道噪聲的自功率譜,這在實際中很難獲得,因此本文對ECKART加權函數進行了改進,由譜的共軛對稱性可得N1點的完整互譜R1(k):
(16)
為提高時域相關函數分辨率,對頻域互譜R1(k)補零加長,周期延拓成N2點的序列,其分辨率提高N2/N1倍。
(17)
式中,N為初始信號序列長度,N1和N2需滿足N2≥N1≥2N-1,n=0,1,…,N2-1。
對R2(k)進行IMCZT逆變換得到二次互相關函數r(n):
(18)
對二次互相關函數做歸一化處理得:
(19)
式中,ε是為了避免除數為0時所使用的微小正數,取值為0.000 001。
4 改進后的算法仿真分析
為了驗證改進算法的時延估計性能,利用MATLAB給兩段時延估計值為1 ms聲源信號添加不同信噪比(SNR=-15 dB、-5 dB、0 dB)的隨機噪聲來進行模擬噪聲實驗,分別使用廣義二次互相關算法和改進的廣義二次互相關算法分別對兩路聲源信號做互相關求其時延估計值,通過相關結果的峰值來判斷時延估計的精確度,主峰越凸顯,其時延估計性能越好。圖6為時延估計值為1 ms的兩路聲源信號。互相關函數結果如圖7~9所示。
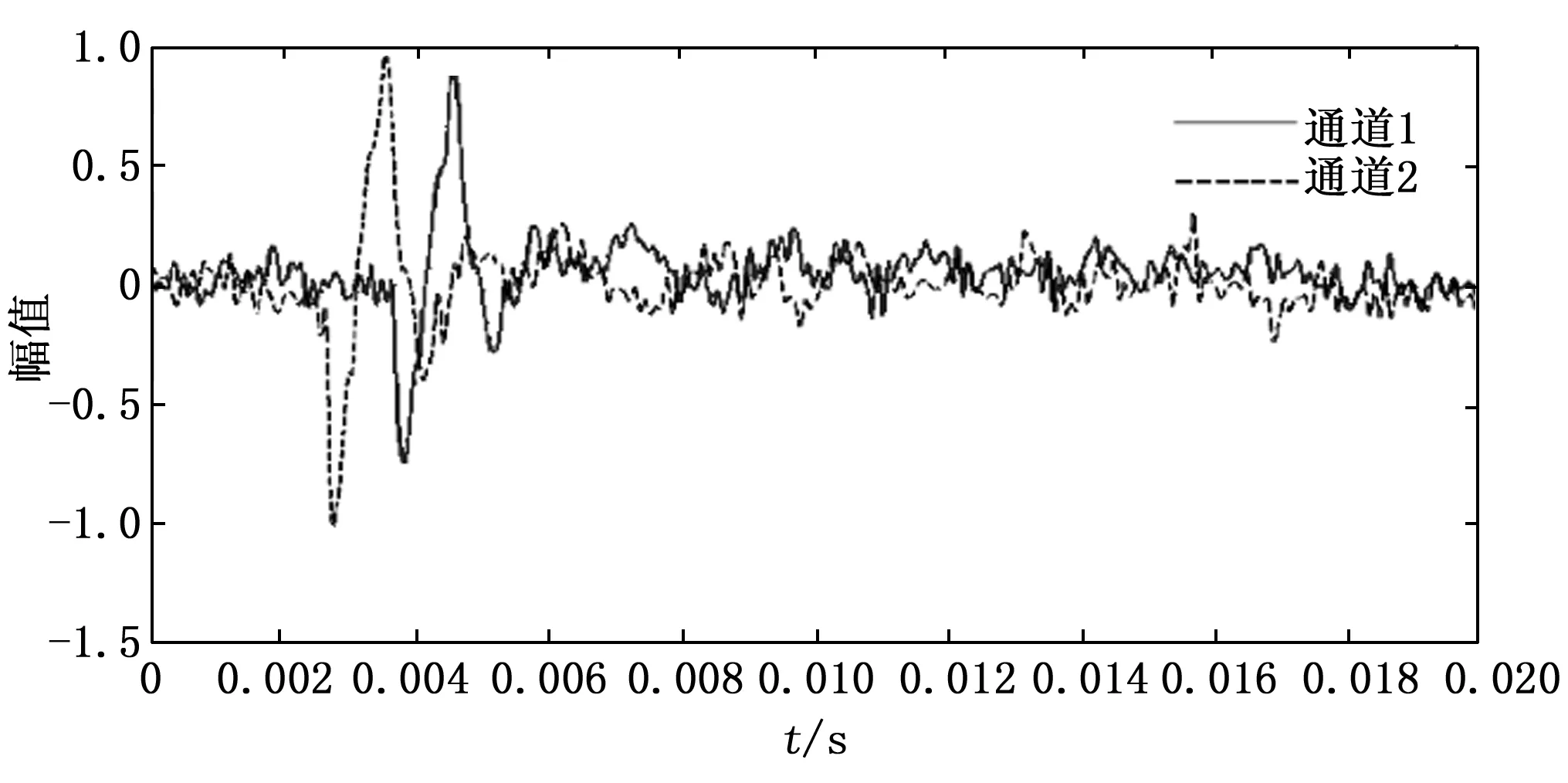
圖6 時延估計值為1 ms的兩路聲源信號

圖7 SNR=-15 dB時兩種算法的時延估計結果

圖8 SNR=-5 dB時兩種算法的時延估計結果
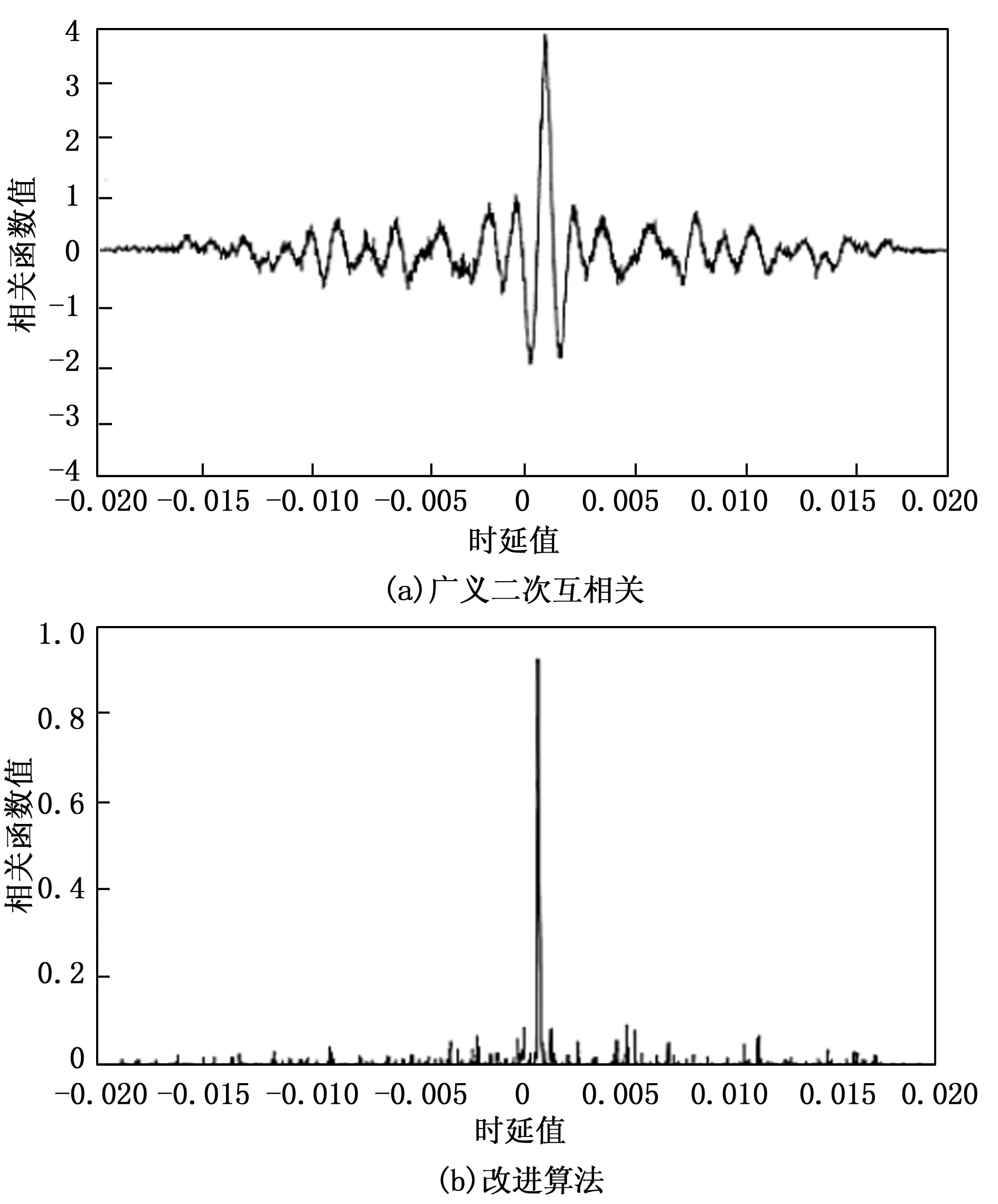
圖9 SNR=0 dB時兩種算法的時延估計結果
由圖6可知,當信噪為0 dB時,廣義二次互相關和改進的廣義二次互相關算法計算的相關函數都有明顯的主峰,時延估計的性能基本相同,都可以精確地估算出時延值;當信噪比為-5 dB時,廣義二次互相關獲得的互相關函數圖出現多個干擾峰,主峰不夠突出,改進算法的相關函數圖主峰依舊明顯;當信噪比為-15 dB時,廣義二次互相關算法的真實峰值已經被淹沒,廣而使用改進的廣義二次互相關算法獲得的互相關函數僅出現了少許干擾峰,最大干擾峰值不到主峰值的1/2,主峰依然很明顯。兩種算法分別在不同信噪下獲得的10次時延估計均值如表1所示。
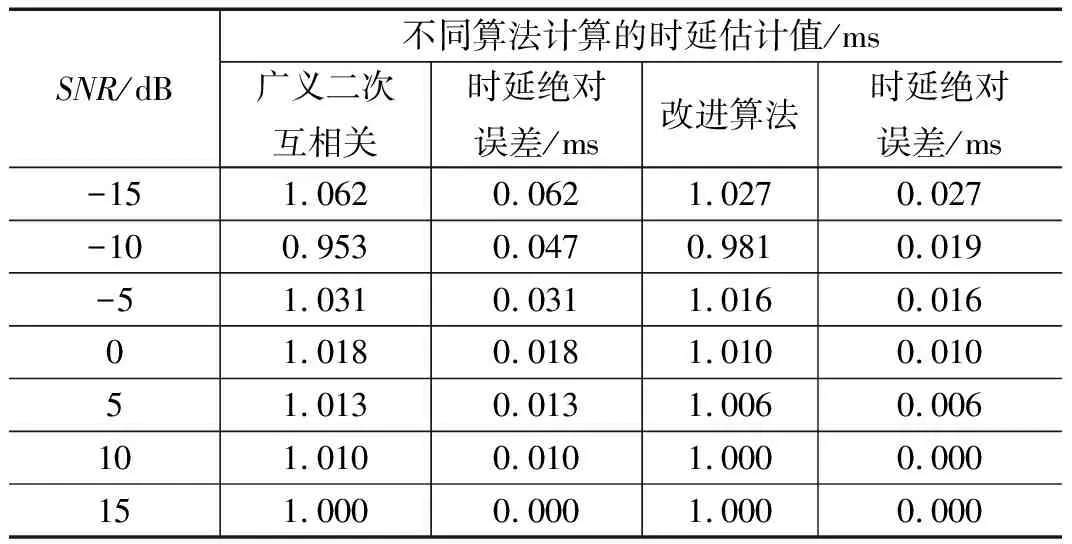
表1 不同信噪比下的時延估計值
由表1可知,相比廣義二次互相關算法,改進算法在低信噪比情況下的時延估計性能明顯提升,當SNR大于-10 dB時,時延估計誤差小于20 μs,該算法可以滿足立體六元聲光陣列在低信噪比的情況下具有較高的俯仰角測試精度。
為了進一步驗證聲光陣列結構的實用性以及改進后的廣義互相關算法的有效性,在空曠的戶外對聲光陣列以及算法進行炸高測量實驗驗證,聲光陣列實物如圖10所示。
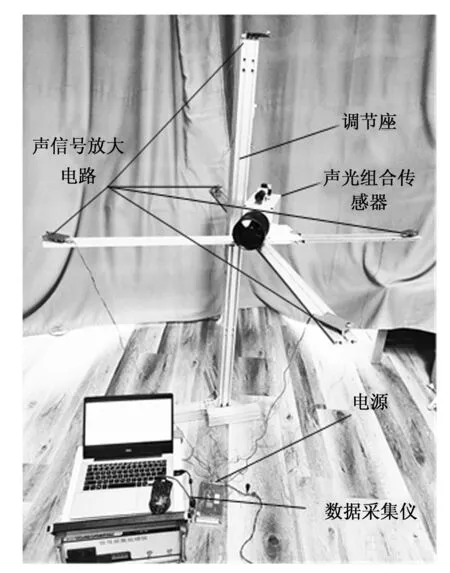
圖10 聲光陣列實物圖
以全站儀測量值作為炸點高度得真值,為了避免因全站儀的不確定因素導致的實驗結果存在誤差,故選用兩套全站儀同時測量炸點高度值取其平均值,在同一環境下使用聲光陣列測量炸點高度,陣元間距設為2.2 m,數據采集卡的采樣頻率設置為1 MHz,采樣位數為16位,采樣點數設為1×106個,選取10個不同高度的位置進行炸高測量,每個位置做3次試驗取平均值,最終測量的炸點的俯仰角及高度等數據如表2所示。

表2 聲源高度測量實驗數據
對表2數據進行分析可知,使用立體六元聲光陣列測量炸高范圍為(20 m,60 m)的炸點距離誤差小于4%,與上述仿真結果一致;同時該基陣測試的聲源位置的俯仰角相對誤差小于2.5%、炸高測試誤差小于5%,實驗驗證本文所提立體六元聲光陣列可以有效的應用于炸高測量中。
5 結束語
本文提出了一種基于聲光陣列的炸高測量技術,該方法通過測量爆炸聲音到達不同傳感器的聲程差和聲光信號到達測量基陣的時延估計值,實現單基陣測量炸點高度。經仿真分析,該聲光陣列適用于測量高度范圍為20~60 m內的炸點高度,測量時應確保陣元間距大于2 m,時延估計誤差小于20 μs,聲光信號到達基陣時延估計誤差絕對值不高于4 ms。
除此之外,本文對廣義二次互相關算法進行了改進,通過理論分析與實驗驗證了改進后的廣義二次互相關算法在高信噪比的環境下可以得到精確的時延值,在低信噪比下,該算法獲得時延估計相對誤差小于3%,相比改進前時延估計提高了一倍,最終實現炸高測量偏差在5%之內,具有較高的測試精度,可以應用于靶場炸高測量中。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00