循環(huán)神經(jīng)網(wǎng)絡(luò)輔助GNSS/SINS組合導(dǎo)航方法及性能分析
2021-12-22 05:58:34閆世霖吳德偉戴傳金朱浩男
空軍工程大學(xué)學(xué)報(bào) 2021年5期
閆世霖, 吳德偉, 王 偉, 戴傳金, 朱浩男
(1.空軍工程大學(xué)信息與導(dǎo)航學(xué)院,西安,710077;2.中國電子科技集團(tuán)公司第二十研究所,西安,710068)
在定位導(dǎo)航系統(tǒng)的應(yīng)用中,捷聯(lián)慣性導(dǎo)航系統(tǒng)(strapdown inertial navigation system, SINS)[1]與全球?qū)Ш叫l(wèi)星系統(tǒng)(global navigation satellite system, GNSS)[2-3]是當(dāng)今最常用的兩種定位系統(tǒng)。捷聯(lián)慣性導(dǎo)航系統(tǒng)作為完全自主的導(dǎo)航系統(tǒng),其具有不依賴外部信息以及數(shù)據(jù)更新率高的優(yōu)點(diǎn)。但是,由于慣性導(dǎo)航系統(tǒng)的工作方式屬于推算導(dǎo)航方式,其本身會產(chǎn)生累積誤差,使其定位誤差逐漸增大,因此慣性導(dǎo)航系統(tǒng)不適合長時間導(dǎo)航。全球?qū)Ш叫l(wèi)星系統(tǒng)不存在累積誤差,具備長時間高精度導(dǎo)航的能力,但GNSS需要至少有4顆具有良好幾何結(jié)構(gòu)的衛(wèi)星能被GNSS天線直接觀測到,才能夠提供準(zhǔn)確的位置和速度信息。由于可觀測衛(wèi)星的數(shù)量、多徑效應(yīng)和外部環(huán)境干擾的影響,導(dǎo)致GNSS是不穩(wěn)定的[4-5]。
為了克服GNSS和SINS各自的缺陷,通常利用卡爾曼濾波將兩者融合形成組合導(dǎo)航系統(tǒng),而GNSS/SINS組合導(dǎo)航系統(tǒng)[6-8]也是當(dāng)前應(yīng)用最成功、最廣泛、性能最優(yōu)越的組合導(dǎo)航系統(tǒng)。然而,在實(shí)際應(yīng)用時,會遇到特殊情況導(dǎo)致GNSS信號中斷,此時,SINS的位置估計(jì)誤差將無法利用Kalman濾波器進(jìn)行調(diào)整,導(dǎo)航誤差會迅速發(fā)散,因此,組合導(dǎo)航系統(tǒng)中GNSS信號失鎖從而導(dǎo)致導(dǎo)航性能大幅度下降的問題也是目前組合導(dǎo)航系統(tǒng)亟需解決的問題。
人工神經(jīng)網(wǎng)絡(luò)[9-10](artificial neural network, ANN)可以通過有監(jiān)督的訓(xùn)練來實(shí)現(xiàn)輸入到輸出非線性映射,用來模擬高度復(fù)雜和非線性的隨機(jī)問題,并且在組合導(dǎo)航和慣導(dǎo)誤差校正中取得了很好的效果[11-13]。
Yiqing Yao等[14]提出了一種新的融合算法,結(jié)合卡爾曼濾波和改進(jìn)的多層感知器網(wǎng)絡(luò),通過數(shù)據(jù)訓(xùn)練在全球定位系統(tǒng)(global positioning system, GPS)信號中斷時預(yù)測和估計(jì)偽GPS位置,從而保持了組合導(dǎo)航系統(tǒng)在GPS信號中斷時的性能,之后又對人工智能模塊的輸入進(jìn)行了簡化,探討了模型對慣導(dǎo)信息的依賴性。Mehdi Aslinezhad等[15]提出了一種GPS/INS融合算法在GPS中斷時的誤差補(bǔ)償方法,首先采用魯棒Kalman濾波器補(bǔ)償INS觀測誤差,然后利用人工神經(jīng)網(wǎng)絡(luò)的融合方法來提供缺失位置信息,最終通過實(shí)驗(yàn)驗(yàn)證其方法使定位誤差的均方根值降低了5%左右,輸出位置估計(jì)誤差至少降低了67%。Yimin Zhou 等[16]將卡爾曼濾波和反向傳播神經(jīng)網(wǎng)絡(luò)(back propagation neural network, BPNN)相結(jié)合,并通過實(shí)驗(yàn)證明該方法有效地解決了GPS干擾環(huán)境下精度低的問題。鮑泳林等[17]針對GPS失鎖的問題采用了徑向基神經(jīng)網(wǎng)絡(luò)(radial basis function neural network, RBFNN)輔助組合導(dǎo)航的方法,并證明了其可行性。陳光武等[18]提出了一種基于人工蜂群算法改進(jìn)的RBFNN增強(qiáng)改進(jìn)的自適應(yīng)無跡卡爾曼濾波算法,并通過實(shí)驗(yàn)證明其方法能夠抑制慣性誤差的發(fā)散。白相文等[19]提出了Elman神經(jīng)網(wǎng)絡(luò)輔助的組合導(dǎo)航聯(lián)邦濾波算法,并通過仿真實(shí)驗(yàn)證明了該算法可以在衛(wèi)星信號失鎖時有效抑制慣導(dǎo)誤差的累積。
采用神經(jīng)網(wǎng)絡(luò)預(yù)測SINS的誤差,其本質(zhì)上是利用神經(jīng)網(wǎng)絡(luò)來學(xué)習(xí)SINS的誤差規(guī)律,并且SINS當(dāng)前的位置誤差主要與SINS數(shù)據(jù)、末次誤差、陀螺儀靜態(tài)誤差、加速度計(jì)靜態(tài)誤差、車輛動態(tài)和環(huán)境有關(guān),而且位置誤差與這些因素之間的關(guān)系是非線性的,難以建模[20]。而基于神經(jīng)網(wǎng)絡(luò)的人工智能技術(shù)可以映射這些關(guān)系。
然而現(xiàn)有的基于人工神經(jīng)網(wǎng)絡(luò)的方法大多都是基于一定時刻的慣導(dǎo)誤差與相應(yīng)的慣導(dǎo)輸出相關(guān)聯(lián),沒有考慮慣導(dǎo)系統(tǒng)過去值對誤差的影響,而導(dǎo)航信息是一個時間序列,載體前一時刻和當(dāng)前時刻的導(dǎo)航信息是密切相關(guān)的,因此對SINS誤差的預(yù)測是一個時間序列預(yù)測的問題,這就需要神經(jīng)網(wǎng)絡(luò)的輸出不應(yīng)僅與當(dāng)前時刻的輸入有關(guān),還應(yīng)與之前的輸入相關(guān)。基于此,本文使用循環(huán)神經(jīng)網(wǎng)絡(luò)(recurrent neural network, RNN)來輔助組合導(dǎo)航系統(tǒng),它可以反映當(dāng)前時刻的輸出和之前的輸入之間的關(guān)系,更加充分地利用數(shù)據(jù)樣本進(jìn)行訓(xùn)練,從而更加精確預(yù)測SINS的位置和速度誤差,使得GNSS在長時間中斷期間,組合導(dǎo)航系統(tǒng)擁有可靠的導(dǎo)航性能。
1 GNSS/SINS組合導(dǎo)航濾波
捷聯(lián)慣性導(dǎo)航系統(tǒng)作為完全自主的導(dǎo)航系統(tǒng),其工作時不依賴任何外部信息以及數(shù)據(jù)更新率高的特性,使其作為導(dǎo)航設(shè)備的首選,但是由于慣性導(dǎo)航系統(tǒng)的工作方式屬于推算導(dǎo)航方式,其解算過程中會產(chǎn)生累積誤差,并且隨時間會逐漸增大。而解決這一問題便是采用現(xiàn)在廣泛應(yīng)用的組合導(dǎo)航技術(shù),GNSS與SINS形成的組合導(dǎo)航系統(tǒng)可以避免慣導(dǎo)誤差累積的缺點(diǎn),從而提供高精度的導(dǎo)航信息。
GNSS/SINS松耦合組合導(dǎo)航即位置、速度模式的組合導(dǎo)航系統(tǒng)[20],其誤差狀態(tài)量均定義為SINS誤差,共15維,其中包含9個SINS的基本導(dǎo)航參數(shù)誤差以及6個慣性儀表的誤差狀態(tài)量,因此組合導(dǎo)航系統(tǒng)的狀態(tài)方程可以表示為:

(1)
式中:X為系統(tǒng)的狀態(tài)變量;F為系統(tǒng)傳遞矩陣;W為系統(tǒng)噪聲矩陣。
采用SINS解算的位置和速度與GNSS測量得到的位置和速度之差,可以得到組合導(dǎo)航系統(tǒng)的量測方程為:
Z(t)=H(t)X(t)+V(t)
(2)
式中:Z為系統(tǒng)的量測矢量;H為測量矩陣;V為量測噪聲矢量。
由上節(jié)可得,組合導(dǎo)航系統(tǒng)的狀態(tài)方程和量測方程分別為:
(3)
將組合導(dǎo)航系統(tǒng)的狀態(tài)方程和量測方程離散化可以表示為:
(4)
式中:Φk,k-1為系統(tǒng)從時間步長k-1到k的對應(yīng)狀態(tài)轉(zhuǎn)移矩陣,閉環(huán)系統(tǒng)的卡爾曼濾波方程如下:
(5)
在GNSS信號可用時,可以利用GNSS與SINS形成的組合導(dǎo)航系統(tǒng)來校正慣導(dǎo)的誤差,但是現(xiàn)實(shí)中經(jīng)常會因?yàn)橥獠凯h(huán)境干擾等影響導(dǎo)致GNSS信號中斷,此時組合導(dǎo)航系統(tǒng)會因?yàn)闆]有GNSS數(shù)據(jù)進(jìn)行量測更新重新變?yōu)閱我坏膽T性導(dǎo)航系統(tǒng),同時導(dǎo)航精度也會迅速降低。
2 循環(huán)神經(jīng)網(wǎng)絡(luò)輔助GNSS/SINS組合導(dǎo)航方法
針對GNSS信號中斷過程中,組合導(dǎo)航系統(tǒng)會因?yàn)閼T導(dǎo)誤差發(fā)散導(dǎo)致精度下降的問題,本文采用了循環(huán)神經(jīng)網(wǎng)絡(luò)來輔助組合導(dǎo)航系統(tǒng),使其在GNSS信號中斷時利用RNN的預(yù)測結(jié)果來修正SINS的導(dǎo)航偏差,從而提升組合導(dǎo)航系統(tǒng)的導(dǎo)航精度與可靠性。
2.1 循環(huán)神經(jīng)網(wǎng)絡(luò)
傳統(tǒng)的全連接神經(jīng)網(wǎng)絡(luò)(full connected neural networks, FCNN)只是單獨(dú)的處理一個輸入與輸出的映射關(guān)系,沒有將前一時刻輸入和后一時刻的輸入關(guān)聯(lián)起來,在處理時間或空間上有前后關(guān)聯(lián)的輸入問題時會有些不足。與FCNN不同的是,循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)可以將當(dāng)前的輸入與之前信息相互關(guān)聯(lián)。從網(wǎng)絡(luò)結(jié)構(gòu)上來看,RNN可以記憶前面節(jié)點(diǎn)的隱藏層信息,并利用之前的信息影響后面結(jié)點(diǎn)的輸出。
如圖1所示,將RNN模型按時間線展開,其中Xt、St、Ot分別為神經(jīng)網(wǎng)絡(luò)在t時刻的輸入層、隱藏層和輸出層,U和bU為輸入層到隱藏層的權(quán)重矩陣和偏置向量,V和bV為隱藏層到輸出層的權(quán)重矩陣和偏置向量;W為上一時刻的隱藏層到當(dāng)前時刻隱藏層的權(quán)重矩陣。
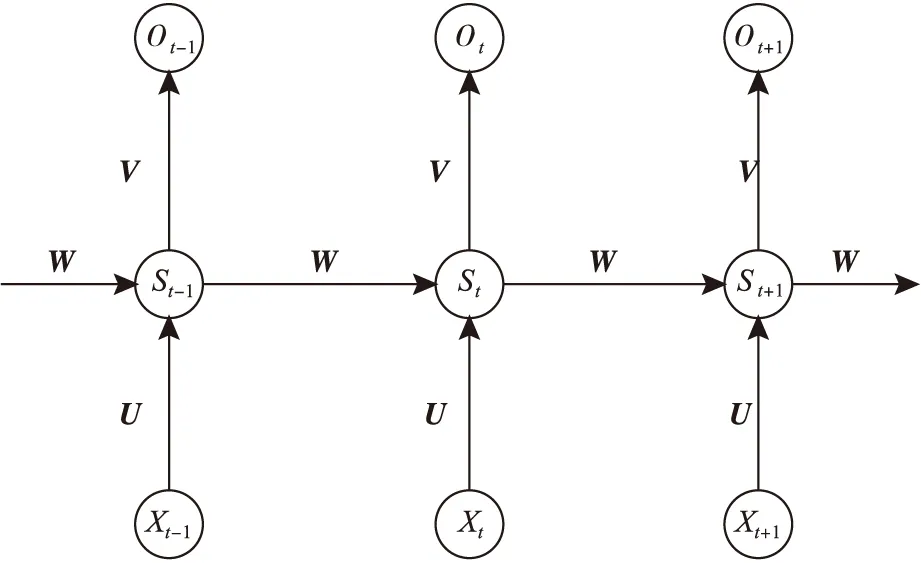
圖1 循環(huán)神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)圖
為了能夠清晰地看到上一時刻的隱藏層對當(dāng)前時刻的隱藏層的影響,以輸入層4個神經(jīng)元,隱藏層3個神經(jīng)元,輸出層2個神經(jīng)元為例,將其模型從t時刻展開,如圖2所示。
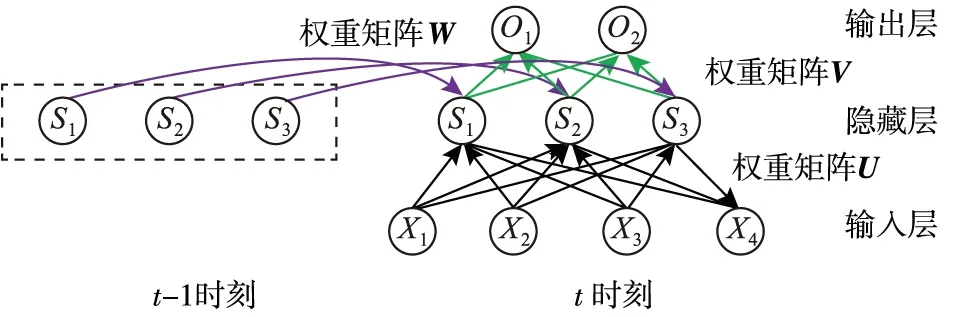
圖2 循環(huán)神經(jīng)網(wǎng)絡(luò)在t時刻展開圖
由RNN的結(jié)構(gòu)圖可得,該網(wǎng)絡(luò)在t時刻接收到輸入Xt之后,隱藏層的值為St,輸出值為Ot。而最關(guān)鍵的是,St的值不僅僅取決于Xt,還取決于上一時刻隱藏層的輸出,即St-1。因此RNN前向傳播的計(jì)算方法可以表示為:
(6)
式中:g(·)和f(·)為輸出層和隱藏層激活函數(shù),選取的激活函數(shù)為tanh函數(shù),即:
(7)
在計(jì)算過程中所需要的參數(shù)是共享的,并且當(dāng)前時刻隱藏層的輸出St的計(jì)算需要St-1,而St-1的計(jì)算又需要St-2,以此類推,RNN中某一時刻的狀態(tài)對過去的狀態(tài)都存在依賴。因此,循環(huán)神經(jīng)網(wǎng)絡(luò)能夠很好地處理對過去樣本數(shù)據(jù)具有依賴性的時序問題,可以達(dá)到更好的預(yù)測效果。
2.2 輔助組合導(dǎo)航方法
基于卡爾曼濾波器的GNSS/INS數(shù)據(jù)融合,由于其高性能和簡單性,是滿足主要導(dǎo)航要求的首選方法。但是如果GNSS信號中斷,卡爾曼濾波器就無法獲取量測信息,導(dǎo)航精度將會迅速降低。
循環(huán)神經(jīng)網(wǎng)絡(luò)輔助組合導(dǎo)航系統(tǒng)的工作原理就是在衛(wèi)星信號可用時,利用神經(jīng)網(wǎng)絡(luò)訓(xùn)練SINS的誤差模型,建立載體的導(dǎo)航信息與誤差模型之間的關(guān)系;在衛(wèi)星信號失鎖時,利用訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)來預(yù)測SINS的誤差并修正SINS的輸出,從而繼續(xù)為載體提供可靠的導(dǎo)航信息。
RNN的學(xué)習(xí)過程分為2個階段:第1階段是神經(jīng)網(wǎng)絡(luò)通過學(xué)習(xí)算法進(jìn)行訓(xùn)練;第2階段是神經(jīng)網(wǎng)絡(luò)對輸入數(shù)據(jù)進(jìn)行預(yù)測,根據(jù)存儲的知識估計(jì)輸出。同樣,系統(tǒng)的工作過程也分為兩步,分別為GNSS信號可用時循環(huán)神經(jīng)網(wǎng)絡(luò)對SINS誤差模型的訓(xùn)練過程和GNSS信號中斷時循環(huán)神經(jīng)網(wǎng)絡(luò)對SINS誤差的預(yù)測過程。RNN輔助組合導(dǎo)航系統(tǒng)的工作原理見圖3。
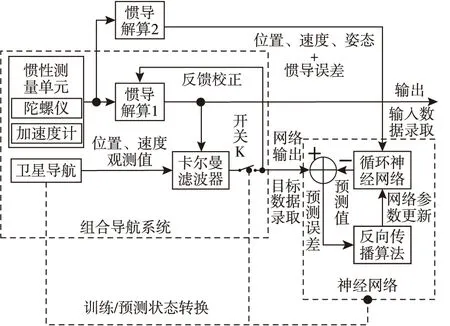
圖3 系統(tǒng)工作原理圖
如圖3所示,結(jié)合卡爾曼濾波器和循環(huán)神經(jīng)網(wǎng)絡(luò),構(gòu)建了RNN輔助的GNSS/SINS組合導(dǎo)航系統(tǒng)。當(dāng)GNSS信號可用時,系統(tǒng)處于第1階段,此時,卡爾曼濾波器對慣導(dǎo)和衛(wèi)導(dǎo)進(jìn)行信息融合,開關(guān)K處于閉合狀態(tài),利用卡爾曼濾波器的輸出信息對慣導(dǎo)進(jìn)行反饋校正,同時神經(jīng)網(wǎng)絡(luò)采集慣性傳感元件的輸出信息獨(dú)立解算作為輸入,并利用卡爾曼濾波器輸出的導(dǎo)航信息作為期望輸出進(jìn)行訓(xùn)練。
當(dāng)GNSS信號中斷時,系統(tǒng)處于第2階段,卡爾曼濾波器將失去觀測量,無法獲得準(zhǔn)確的導(dǎo)航信息,也無法用于對慣導(dǎo)的校正。此時,GNSS信號的中斷會使開關(guān)K斷開,并且使神經(jīng)網(wǎng)絡(luò)轉(zhuǎn)換為預(yù)測狀態(tài),神經(jīng)網(wǎng)絡(luò)依然采集慣性傳感元件的輸出信息獨(dú)立解算作為輸入,利用之前訓(xùn)練好的網(wǎng)絡(luò)模型預(yù)測出較為準(zhǔn)確的導(dǎo)航信息,并用來修正SINS的導(dǎo)航信息,從而提供準(zhǔn)確的導(dǎo)航信息。
綜上所述,在衛(wèi)星導(dǎo)航信號正常時,系統(tǒng)通過學(xué)習(xí)輸入與輸出之間的關(guān)系對神經(jīng)網(wǎng)絡(luò)進(jìn)行在線訓(xùn)練,采用反向傳播算法對網(wǎng)絡(luò)參數(shù)進(jìn)行更新,從而使網(wǎng)絡(luò)對導(dǎo)航信息產(chǎn)生自適應(yīng)性;當(dāng)衛(wèi)星信號中斷時,利用訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)輸出來補(bǔ)償SINS的輸出誤差,從而在衛(wèi)星中斷情況下使系統(tǒng)依然能夠維持組合導(dǎo)航的部分性能來運(yùn)行。
3 輔助組合導(dǎo)航性能分析
3.1 RNN性能
根據(jù)上述組合導(dǎo)航系統(tǒng)模型對系統(tǒng)進(jìn)行仿真,仿真數(shù)據(jù)來自采集的無人機(jī)飛行過程中的位置和速度信息數(shù)據(jù),其飛行軌跡如圖4所示,從而利用循環(huán)神經(jīng)網(wǎng)絡(luò)對其進(jìn)行訓(xùn)練。
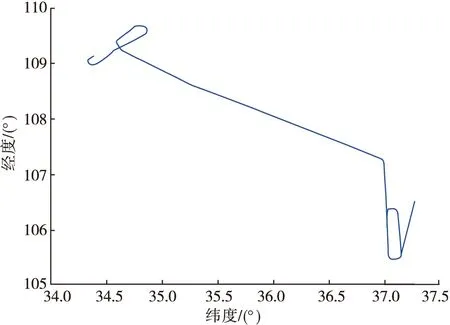
圖4 飛行軌跡
采用機(jī)載組合導(dǎo)航系統(tǒng)的輸出數(shù)據(jù)來驗(yàn)證RNN對衛(wèi)星中斷情況下組合導(dǎo)航系統(tǒng)誤差發(fā)散的抑制效果。實(shí)驗(yàn)中無人機(jī)搭載的慣導(dǎo)的陀螺儀的常值漂移為0.05°/h,為了方便統(tǒng)計(jì)計(jì)算,數(shù)據(jù)的采樣頻率設(shè)定為1 Hz,即系統(tǒng)每1秒輸出1組數(shù)據(jù)。
將無人機(jī)0~3 000 s的飛行數(shù)據(jù)作為訓(xùn)練數(shù)據(jù),此時GNSS信號可用,SINS的輸出與組合導(dǎo)航系統(tǒng)輸出的數(shù)據(jù)作為循環(huán)神經(jīng)網(wǎng)絡(luò)的訓(xùn)練集對網(wǎng)絡(luò)進(jìn)行訓(xùn)練,在3 000~3 200 s時使GNSS信號中斷,采用訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)對SINS的輸出誤差進(jìn)行校正,并將輸出結(jié)果與組合導(dǎo)航系統(tǒng)的輸出進(jìn)行對比,從而判斷其性能。
其仿真結(jié)果見圖5,圖中所示為3 000~3 200 s GNSS信號中斷時,組合導(dǎo)航輸出與RNN預(yù)測以及單獨(dú)SINS輸出得到導(dǎo)航信息對比,并且將組合導(dǎo)航輸出的導(dǎo)航信息作為真實(shí)信息來進(jìn)行對比驗(yàn)證。從圖中可以看出,經(jīng)過RNN對捷聯(lián)慣導(dǎo)的導(dǎo)航誤差預(yù)測校正后輸出的導(dǎo)航信息,其導(dǎo)航誤差有大幅度的改善,因此證明了該算法對于提升衛(wèi)星失鎖情況下組合導(dǎo)航系統(tǒng)的性能具有很大幫助。同時測得,該神經(jīng)網(wǎng)絡(luò)進(jìn)行一次前向預(yù)測所用時間為15.625 ms,滿足最低20 Hz的導(dǎo)航數(shù)據(jù)實(shí)時性需求,因此該算法能夠達(dá)到導(dǎo)航所需的實(shí)時性要求,可以利用其實(shí)現(xiàn)實(shí)時的預(yù)測。
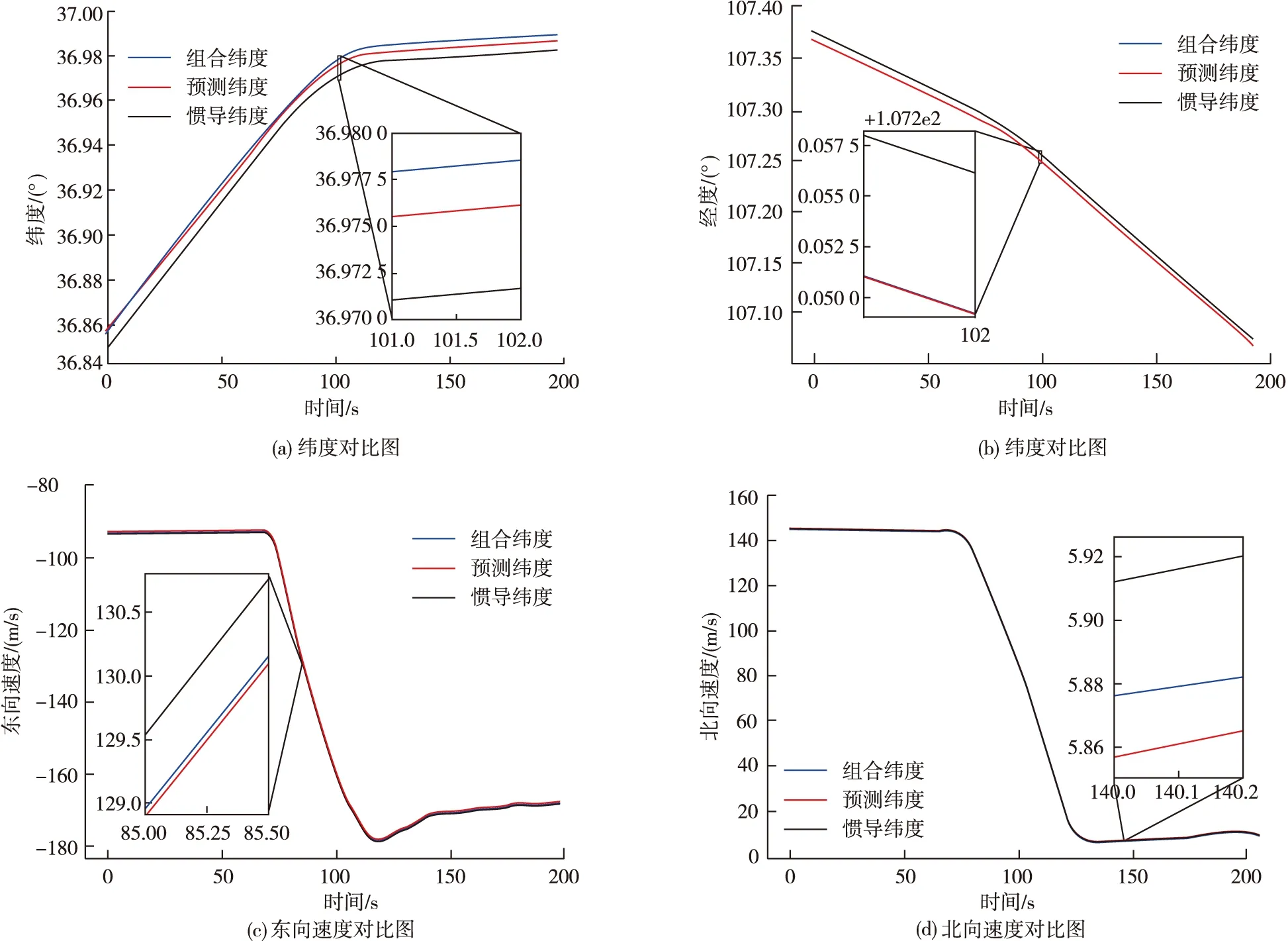
圖5 3種方式輸出的導(dǎo)航信息對比
3.2 RNN與RBFNN性能比較
為了進(jìn)一步驗(yàn)證循環(huán)神經(jīng)網(wǎng)絡(luò)輔助組合導(dǎo)航系統(tǒng)的性能采用同樣的數(shù)據(jù)用徑向基神經(jīng)網(wǎng)絡(luò)來對慣導(dǎo)的誤差進(jìn)行預(yù)測,同樣采用3 000 s數(shù)據(jù)使衛(wèi)導(dǎo)信號處于可用的狀態(tài)對RBFNN進(jìn)行訓(xùn)練,之后衛(wèi)導(dǎo)信號中斷,對慣導(dǎo)系統(tǒng)的輸出誤差進(jìn)行校正,其預(yù)測誤差與RNN預(yù)測誤差的對比結(jié)果見圖6。
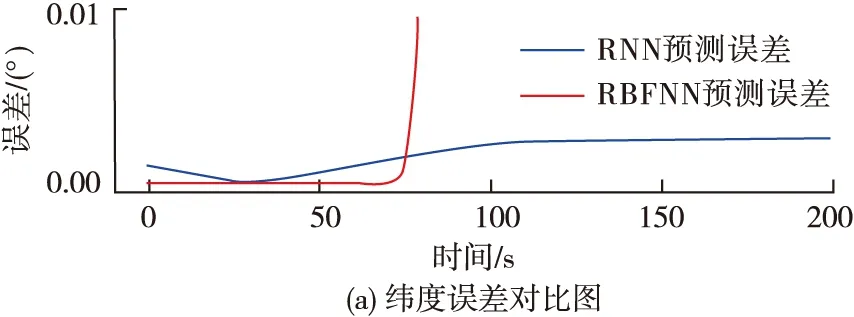
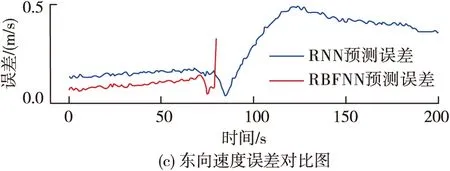
從圖6中可以看出,經(jīng)過RBFNN預(yù)測校正后輸出的導(dǎo)航信息,其導(dǎo)航誤差精度在80 s左右會迅速增大,之后網(wǎng)絡(luò)預(yù)測的導(dǎo)航精度產(chǎn)生明顯下降,而RNN的預(yù)測精度則會在200 s后逐漸衰減,二者相比,使用RNN輔助組合導(dǎo)航系統(tǒng)明顯強(qiáng)于RBFNN的輔助效果。為了更鮮明地對RNN與RBFNN的預(yù)測精度進(jìn)行對比,在衛(wèi)星信號中斷的80 s時間內(nèi),分別從平均值、標(biāo)準(zhǔn)差和均方根誤差3個方面對純慣導(dǎo)和RBFNN以及RNN輔助的3種情況進(jìn)行了分析,其結(jié)果如表1所示。

表1 不同輔助情況下位置和速度誤差的統(tǒng)計(jì)特性對比
從表1中可以更直觀地看出,RBFNN以及RNN輔助的組合導(dǎo)航系統(tǒng)在衛(wèi)導(dǎo)信號中斷的情況下與沒有神經(jīng)網(wǎng)絡(luò)輔助的組合導(dǎo)航系統(tǒng)相比較,在導(dǎo)航性能方面均有很大的提高,證明了神經(jīng)網(wǎng)絡(luò)在GNSS信號中斷時校正SINS誤差的可行性,并且通過實(shí)驗(yàn)數(shù)據(jù)進(jìn)一步驗(yàn)證,RNN的預(yù)測效果要優(yōu)于RBFNN,證實(shí)了采用循環(huán)神經(jīng)網(wǎng)絡(luò)輔助組合導(dǎo)航系統(tǒng)的優(yōu)越性。
4 結(jié)論
針對目前神經(jīng)網(wǎng)絡(luò)輔助組合導(dǎo)航系統(tǒng)過程中,僅僅處理某一時刻的輸入與輸出的映射關(guān)系,忽略了誤差對SINS過去值的依賴性的問題,本文提出了利用RNN輔助SINS/GNSS導(dǎo)航定位的方法,可以分別基于當(dāng)前和過去的導(dǎo)航信息進(jìn)行訓(xùn)練,從而在GNSS信號中斷時,循環(huán)神經(jīng)網(wǎng)絡(luò)可以預(yù)測得到更為準(zhǔn)確的導(dǎo)航信息,并利用飛行試驗(yàn)數(shù)據(jù)對其進(jìn)行了仿真驗(yàn)證。實(shí)驗(yàn)結(jié)果表明,采用RNN輔助組合導(dǎo)航系統(tǒng)在衛(wèi)星信號中斷時可以有效提升導(dǎo)航精度,其預(yù)測效果與徑向基神經(jīng)網(wǎng)絡(luò)輔助的組合導(dǎo)航系統(tǒng)相比,導(dǎo)航精度的維持時間更長,位置和速度的均方根誤差平均降低了39%,并且該算法滿足導(dǎo)航所需的實(shí)時性要求,證明了本文提出的方法的可行性和有效性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
中外會展(2014年4期)2014-11-27 07:46:46
電子設(shè)計(jì)工程(2014年6期)2014-02-27 11:56:54
