石油鉆機平移裝置卡爪與滑軌失效分析
2021-12-22 06:38:02郭高壘劉杰劉雙進
機械工程師 2021年12期
郭高壘,劉杰,劉雙進
(中石化中原石油工程有限公司工程服務(wù)管理中心,河南濮陽 457001)
0 引言
同一井場鉆多口井,可實現(xiàn)重復(fù)、批量化作業(yè),“井工廠”鉆井模式通常依靠鉆機整體平移裝置來實現(xiàn)[1],而步行器卡爪與滑軌作為陸地機械或混合動力石油鉆機整體平移裝置的主要承載部件,它們的失效直接影響著鉆機平移。
目前,針對步行器失效方面的專題分析還很少,鑒于此,本文以一種棘爪步行器在鉆機平移過程中出現(xiàn)的卡爪、滑軌損壞問題為研究切入點,以棘爪步行器為研究對象,利用力學(xué)原理與方法,對比分析不同工況下步行器部件間作用結(jié)果,從機理上剖析造成步行器卡爪與滑軌失效的根源。
1 步行器結(jié)構(gòu)及類型
目前,陸地機械或混合動力石油鉆機在同一井場各井口間短距離搬遷主要采用滑軌式整體平移裝置,步行器主要采用楔塊式與棘爪式,如圖1所示。
棘爪式步行器是由楔塊式步行器演變而來,在同一方向連續(xù)移動時,不需要人工操作步行器,降低操作勞動強度[2],其主要結(jié)構(gòu)如圖1(b)所示。棘爪步行器通過棘爪刃與滑軌棘爪孔板接觸配合實現(xiàn)其作為鉆機平移動力的基點[3],依靠液缸循環(huán)往復(fù)動作完成鉆機在滑軌方向的連續(xù)步進移動。卡爪實現(xiàn)步行器在滑軌平面法向的位移限制,翻轉(zhuǎn)手柄實現(xiàn)鉆機平移方向的改變,同時對棘爪作用位置具有限位作用。
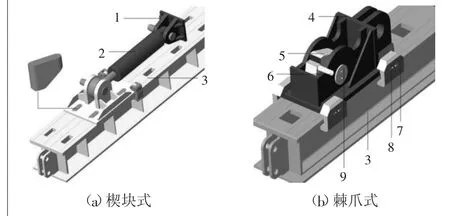
圖1 步行器類型
2 步行器卡爪及滑軌失效型式
棘爪步行器卡爪失效主要表現(xiàn)在塑性變形與斷裂破壞,如圖2(a)、圖2(b)所示。此種失效是由于滑軌與步行器相互作用力過大,造成卡爪力超過卡爪允許承載范圍[4]。滑軌失效主要表現(xiàn)在滑軌面出現(xiàn)距離棘爪孔邊緣一定距離的線狀或面狀連續(xù)壓痕、滑軌面整體發(fā)生塑性變形或沿棘爪孔兩側(cè)邊方向撕裂,如圖2(c)、圖2(d)所示。
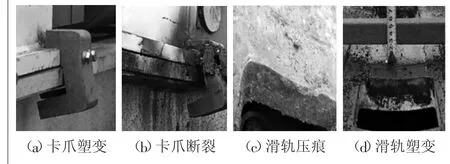
圖2 失效類型
現(xiàn)場統(tǒng)計發(fā)現(xiàn),鉆機平移裝置步行器卡爪與滑軌的失效主要發(fā)生在步行器棘爪的限位手柄未安裝或限位效果失效情況下進行的鉆機平移,下面將針對步行器棘爪限位與不限位兩種工況下步行器受力情況進行分析,從而發(fā)現(xiàn)棘爪限位與不限位對步行器卡爪和滑軌的影響。
3 步行器力學(xué)分析與求解
3.1 棘爪限位工況下步行器受力分析
在限位工況下,棘爪步行器沿滑軌面移動直至棘爪法向刃面滑入棘爪孔內(nèi),在液缸反向作用下,由于步行器棘爪翻轉(zhuǎn)手柄的限位作用,限位手柄對棘爪產(chǎn)生作用力,此力阻止了棘爪圍繞銷軸的進一步轉(zhuǎn)動,實現(xiàn)步行器棘爪豎向刃面與滑軌棘爪孔內(nèi)側(cè)面接觸,滑軌對棘爪產(chǎn)生一個水平方向的作用力F1。
鉆機平移過程中,忽略液缸安裝誤差,則液缸對步行器作用產(chǎn)生水平方向的作用力F0,滑軌下面分別對步行器前、后端的卡爪產(chǎn)生指向卡爪接觸面方向的卡爪力P1、P2,滑軌上面分別對步行器棘爪座前、后端產(chǎn)生指向棘爪座接觸面方向的正壓力N1、N2,由于滑軌厚度δ小于步行器卡爪與棘爪座作用面之間的距離,所以在同一平移過程中滑軌對步行器同一端的作用力即卡爪力與正壓力不會同時存在,由于步行器液缸力FO作用中心O1點高于棘爪安裝中心O點,因此鉆機推移過程滑軌對步行器的作用力組合為P1與N2組合,拉移過程為P2與N1組合。在鉆機推移過程中步行器的受力情況如圖3所示。
圖3中:m為液缸作用中心高;n為棘爪作用中心高;t為棘爪豎向刃面作用距離;Δ為卡爪長度;O點為棘爪連接銷軸中心;O1點為液缸連接銷軸中心;O2點為棘爪座與滑軌接觸點;L1為O點到前卡爪端面距離;L2為O點到后卡爪端面距離;L3為棘爪水平方向刃面長度。

圖3 步行器受力示意圖
在受力分析中將步行器作為剛體,不考慮其自身變形的影響,由于其在滑軌法向?qū)ΨQ面幾何結(jié)構(gòu)與受力情況的對稱性,因此空間力系問題簡化為平面力系問題,以步行器幾何對稱面為受力平面,以O(shè)點為簡化中心,利用力的平移原理,分別建立步行器在推移與拉移兩種狀態(tài)下的力學(xué)計算模型[5]。棘爪限位工況下步行器平面力學(xué)計算模型如圖4所示。

圖4 棘爪步行器計算模型
在步行器推移狀態(tài)下,依據(jù)平面力系平衡條件,對棘爪限位工況下圖5中推移狀態(tài)受力情況對O點建立力與力矩平衡式,推移狀態(tài)下平衡方程為:

將上述參數(shù)代入式(1)并求解,獲得鉆機推移過程中棘爪限位工況下步行器棘爪力與卡爪力;同理對鉆機拉移狀態(tài)下列平衡方程,并代入求解。在棘爪限位工況下,最終獲得鉆機推移與拉移兩種狀態(tài)下步行器棘爪力與卡爪力的求解結(jié)果:
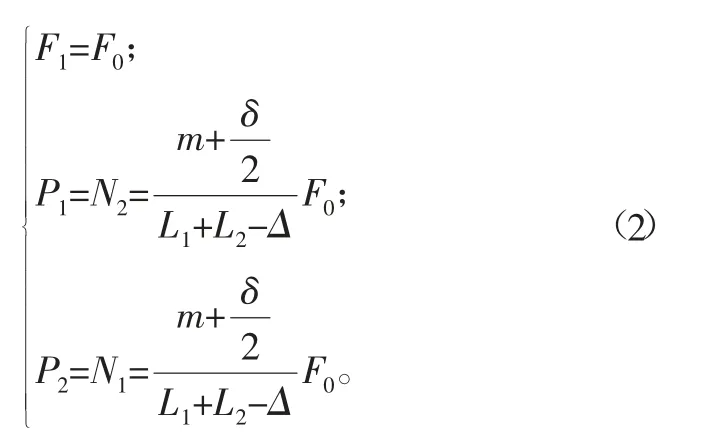
從式(2)發(fā)現(xiàn),無論鉆機推移還是拉移過程,滑軌對棘爪作用力F1值都等于液缸液力F0,步行器棘爪豎向刃面與滑軌棘爪孔內(nèi)側(cè)面接觸作用,滑軌對棘爪產(chǎn)生一個水平方向的作用力F1;滑軌對棘爪座的作用力與對卡爪作用力大小相等,方向相反,在載荷一定情況下,無論是拉移狀態(tài),還是推移狀態(tài),其值都是一樣的;推移過程滑軌對前卡爪作用力值P1等于其對棘爪座后端的作用力N2,即前卡爪受力,后卡爪不受力,拉移過程滑軌對后卡爪作用力值P2等于其對棘爪座前端的作用力N1,即前卡爪不受力,后卡爪受力。
3.2 棘爪無限位工況下步行器受力分析
無限位工況下,步行器在沿滑軌面滑移,直至棘爪豎向作用面滑入棘爪孔內(nèi),液缸反向作用力下,棘爪豎向作用面與棘爪孔側(cè)面接觸,由于步行器棘爪無限位作用,使棘爪繞棘爪連接銷軸轉(zhuǎn)動,直至棘爪水平方向作用面與滑軌上面點O3接觸,產(chǎn)生一個沿O3點指向O點方向的作用力F,同時由于步行器與滑軌之間間隙的存在,步行器整體將向滑軌面法向平移,直至卡爪與滑軌下面接觸,此時步行器棘爪可以簡化成二力桿[5]。
分析中忽略液缸安裝誤差,則液缸對步行器作用力F0為水平方向,推移過程滑軌下面分別對步行器前、后端的卡爪產(chǎn)生指向卡爪接觸面方向的卡爪力為P1′、P2′,拉移過程滑軌下面分別對步行器前、后端的卡爪產(chǎn)生指向卡爪接觸面方向的卡爪力為P1"、P2",由于滑軌對棘爪產(chǎn)生作用力存在向上分力,所以滑軌上面與棘爪座是分離狀態(tài),即它們之間不產(chǎn)生正壓力,步行器在上述力的共同作用下實現(xiàn)力學(xué)平衡,在鉆機推移過程中步行器的受力如圖5所示。圖5中各尺寸含義與圖3中一致,這里不再贅述。
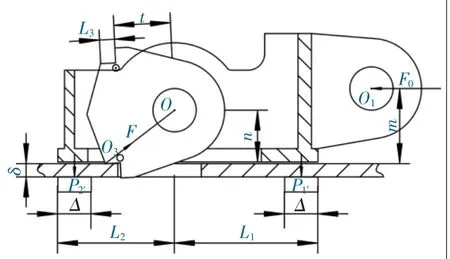
圖5 步行器受力示意圖
利用上述棘爪限位工況下步行器受力分析方法,建立棘爪無限位工況下步行器平面力學(xué)計算模型,如圖6所示。

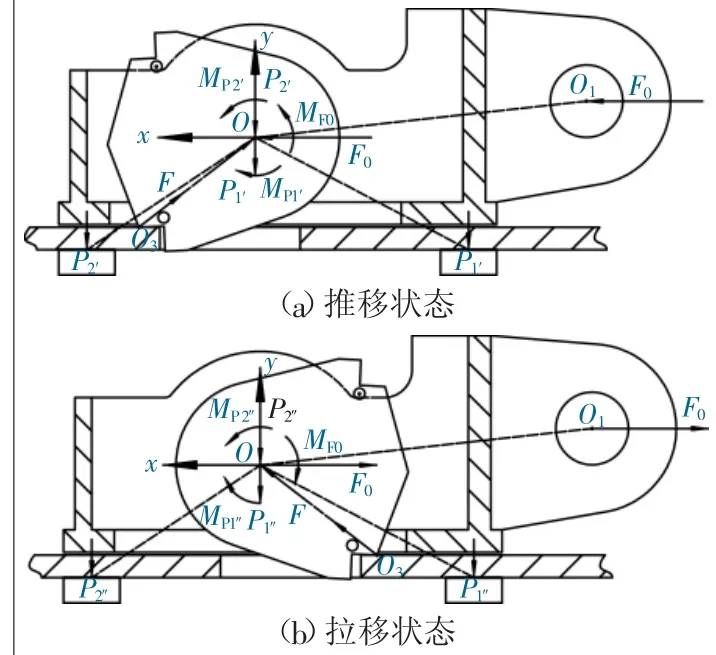
圖6 棘爪步行器計算模型
利用上述棘爪限位工況下步行器兩種狀態(tài)下平衡方程建立的方法,圖6中棘爪步行器推移狀態(tài)下的平衡方程為:
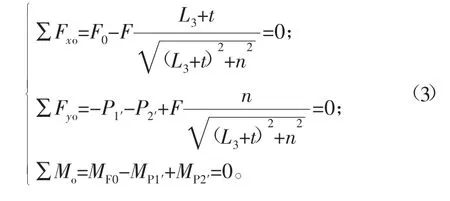
將上述參數(shù)分別代入式(3)并求解,獲得推移過程棘爪無限位工況下步行器棘爪力與卡爪力,如式(4)所示;同理對鉆機拉移狀態(tài)下列平衡方程,并代入求解,在棘爪無限位工況下,獲得拉移狀態(tài)下步行器棘爪力與卡爪力:
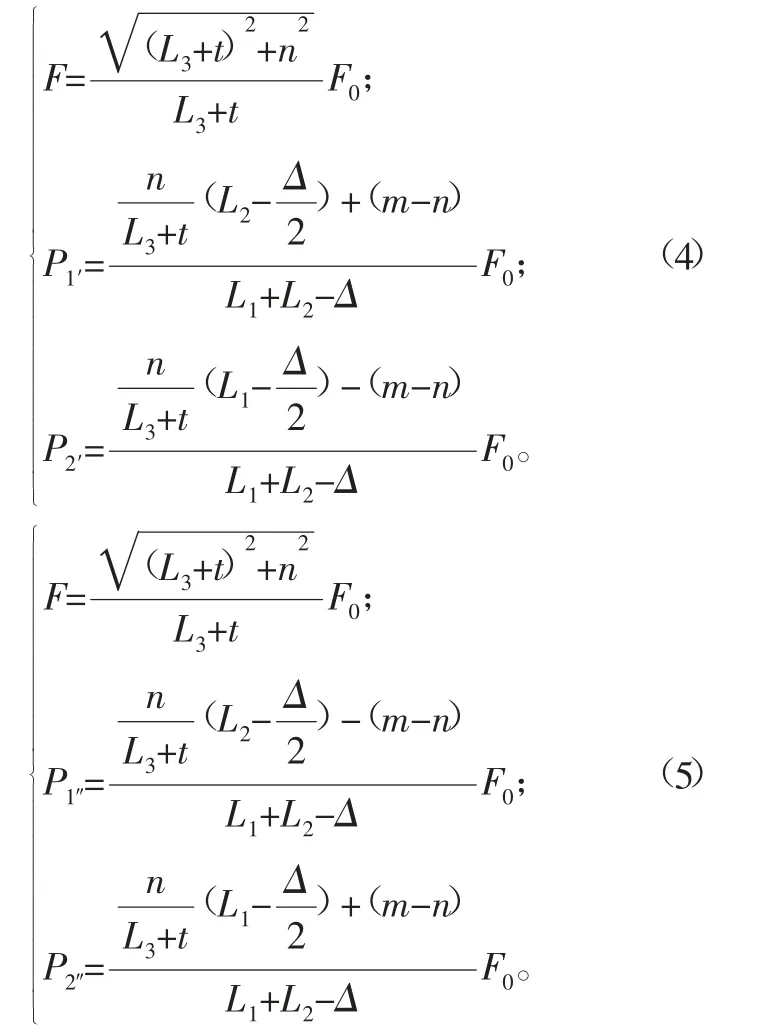
從式(4)與式(5)發(fā)現(xiàn),無論是鉆機推移過程,還是鉆機拉移過程,滑軌對棘爪作用力F值為液缸液力FO及步行器結(jié)構(gòu)決定的定值,棘爪水平方向刃面與滑軌上面產(chǎn)生接觸作用,產(chǎn)生沿接觸點指向棘爪連接銷軸中心方向的棘爪力;滑軌對前、后卡爪都產(chǎn)生作用力,對棘爪座不產(chǎn)生作用力;推移過程中滑軌對前卡爪作用力值P1′大于拉移過程中的作用力值P1″,推移過程中滑軌對后卡爪作用力值P2′小于拉移過程中的作用力值P1″。
3.3 步行器力學(xué)模型實例求解與分析
下面以目前國內(nèi)一些鉆機平移采用的棘爪步行器實例進行分析,其結(jié)構(gòu)尺寸如表1所示。

表1 棘爪步行器幾何結(jié)構(gòu)參數(shù)m
在鉆機平移載荷一定(即液缸液力為定值)的情況下,將表1中結(jié)構(gòu)參數(shù)分別代入棘爪步行器棘爪限位與不限位兩種工況下的鉆機推移與拉移狀態(tài)的式(2)、式(4)及式(5)求解,獲得不同工況下步行器與滑軌間作用力,其分析結(jié)果如表2所示。

表2 不同工況下步行器與滑軌間作用力分析結(jié)果
表2結(jié)果表明:鉆機平移載荷一定時,在不同工況下,由于步行器與滑軌受力狀態(tài)發(fā)生變化,導(dǎo)致滑軌與步行器的作用力也是完全不同的;在同一工況下,步行器無論是推移狀態(tài),還是拉移狀態(tài),滑軌對棘爪作用力為定值,不同的是滑軌對卡爪與步行器棘爪座作用力分布位置及大小的變化;棘爪無限位工況下滑軌對棘爪的作用力是限位工況下的1.23倍,即增加23%,通過上述兩種工況下棘爪受力分析,說明無限位工況下棘爪對滑軌作用面由限位工況下的豎向刃面變?yōu)樗椒较蛉忻妫饔昧τ伤椒较蜃優(yōu)檠丶剞D(zhuǎn)中心指向與滑軌接觸面(線),使滑軌上面產(chǎn)生了法向壓力分量,這正是滑軌產(chǎn)生壓痕及變形失效的一個關(guān)鍵因素。
進一步計算表明:鉆機平移載荷一定時,在步行器推移過程中,棘爪無限位工況下的前卡爪力是限位工況的1.17倍,即增加17%,同時后卡爪也參與承載;在步行器拉移過程中,棘爪無限位工況下的后卡爪力是限位工況的1.41倍,即增加41%,同時前卡爪也參與承載。這正是卡爪變形及斷裂失效的一個關(guān)鍵因素。
4 結(jié)論
1)通過棘爪步行器受力分析及計算結(jié)果對比發(fā)現(xiàn),步行器棘爪無限位工況由于步行器受力狀態(tài)發(fā)生變化,導(dǎo)致棘爪與滑軌相互作用力位置及大小改變,分析結(jié)果證明這一改變不利于滑軌承載,是加劇其失效的誘因。
2)進一步計算表明,鉆機平移載荷一定時,在推移過程中,棘爪無限位工況步行器前卡爪力比限位工況下的前卡爪力增加17%,拉移過程步行器后卡爪力增加41%,這是棘爪無限位工況平移過程卡爪失效的一個關(guān)鍵因素。
