風(fēng)電-儲能-電動汽車聯(lián)合調(diào)頻控制策略研究
2021-12-28 04:59:32婁為翟海保許凌姚寅董楠徐波
可再生能源 2021年12期
關(guān)鍵詞:系統(tǒng)
婁為,翟海保,許凌,姚寅,董楠,徐波
(1.國家電網(wǎng)公司華東分部,上海 200120;2.上海電力大學(xué)電氣工程學(xué)院,上海 200090)
0 引言
為實(shí)現(xiàn)“碳達(dá)峰”和“碳中和”目的,可再生能源(如風(fēng)電、光伏)在能源體系中所占的比例將會持續(xù)升高[1],[2]。風(fēng)電機(jī)組、光伏通常采用最大功率點(diǎn)跟蹤(Maximum Power Point Tracking,MPPT)控制方法跟蹤功率,但不提供備用功率,因此不具備一次調(diào)頻能力。此外,可再生能源機(jī)組的出力具有波動性、不確定性和間歇性,對電力系統(tǒng)頻率的穩(wěn)定性造成不良影響,頻率穩(wěn)定成為可再生能源滲透率極限的主要因素[3]~[6]。
研究表明,采用一定的控制方式調(diào)節(jié)風(fēng)電機(jī)組的輸出功率,可以響應(yīng)系統(tǒng)的頻率變化[7]~[10]。文獻(xiàn)[11]提出,通過調(diào)整槳距角使風(fēng)電機(jī)組預(yù)留一定的一次調(diào)頻備用容量,在功率擾動后提供持續(xù)的功率支撐,參與系統(tǒng)一次調(diào)頻,但單獨(dú)使用此種控制方式不能最大限度利用風(fēng)能,經(jīng)濟(jì)性較差。文獻(xiàn)[12],[13]提出了風(fēng)電機(jī)組的虛擬慣性控制方法,利用其固有轉(zhuǎn)子動能,通過微分和下垂控制實(shí)現(xiàn)虛擬慣量響應(yīng),頻率下降時(shí)釋放的動能轉(zhuǎn)化為電磁功率。然而在轉(zhuǎn)速恢復(fù)階段需要從網(wǎng)側(cè)吸收功率,可能造成二次擾動,導(dǎo)致頻率二次跌落。風(fēng)儲聯(lián)合調(diào)頻控制能夠有效抑制風(fēng)機(jī)功率波動對系統(tǒng)頻率的不良影響,降低單獨(dú)配置儲能單元的成本[14]~[16]。文獻(xiàn)[17]針對風(fēng)電并網(wǎng)不提供慣量的問題,采用儲能設(shè)備輔助風(fēng)電機(jī)組,將系統(tǒng)頻率變化率作為反饋,使風(fēng)儲聯(lián)合系統(tǒng)提供慣量響應(yīng)。文獻(xiàn)[18]提出一種包含電池荷電狀態(tài)(State of Charge,SOC)反饋環(huán)節(jié)的風(fēng)儲調(diào)頻控制策略,依次啟動儲能系統(tǒng)、風(fēng)機(jī)槳距角控制參與系統(tǒng)頻率調(diào)節(jié),但是忽略了各調(diào)頻策略的聯(lián)合特性。文獻(xiàn)[19]基于協(xié)同控制理論,提出了一種飛輪儲能與MPPT運(yùn)行下的風(fēng)電機(jī)組的兩層協(xié)同控制方案,系統(tǒng)頻率響應(yīng)特性得到改善。電動汽車充放電靈活,具有參與系統(tǒng)調(diào)頻的潛力[20]。文獻(xiàn)[21]分析了電動汽車參與電網(wǎng)頻率控制的優(yōu)勢,提出考慮車輛限制和用戶需求的電動汽車參與電網(wǎng)一次頻率和二次調(diào)頻的控制策略。文獻(xiàn)[22],[23]采用橢圓函數(shù)構(gòu)建電池荷電狀態(tài)與充/放電下垂的函數(shù)關(guān)系,實(shí)現(xiàn)電池能量維持和頻率下垂控制,并實(shí)時(shí)修正計(jì)劃充電功率。文獻(xiàn)[24]提出了一種基于改進(jìn)控制信號的插電式混合動力汽車負(fù)荷頻率控制(Load Frequency Control,LFC)策略。上述研究均為電動汽車單獨(dú)參與調(diào)頻,將電動汽車與風(fēng)儲聯(lián)合參與系統(tǒng)調(diào)頻的研究相對較少。
本文提出風(fēng)電機(jī)組、儲能系統(tǒng)、電動汽車的聯(lián)合調(diào)頻控制策略。首先,風(fēng)電機(jī)組提供虛擬慣性響應(yīng)和一次調(diào)頻響應(yīng),利用儲能系統(tǒng)在響應(yīng)速度等方面的優(yōu)勢輔助調(diào)頻,并優(yōu)化風(fēng)儲聯(lián)合調(diào)頻時(shí)儲能系統(tǒng)的分配系數(shù);然后,基于電動汽車的集群響應(yīng),提出電動汽車參與系統(tǒng)一次調(diào)頻的控制策略,發(fā)揮需求側(cè)調(diào)頻的潛力;最后,建立包含傳統(tǒng)機(jī)組、風(fēng)電機(jī)組、儲能系統(tǒng)、電動汽車的系統(tǒng)頻率響應(yīng)模型,驗(yàn)證所提聯(lián)合調(diào)頻控制策略的有效性。
1 聯(lián)合調(diào)頻下電力系統(tǒng)的頻率特性
1.1 頻率響應(yīng)指標(biāo)
當(dāng)系統(tǒng)中有功功率不平衡時(shí),頻率將無法維持在額定值。在功率不平衡條件下,頻率動態(tài)響應(yīng)過程可由搖擺方程來描述[3],即:

式中:H為系統(tǒng)慣性時(shí)間常數(shù);D為系統(tǒng)阻尼常數(shù);Pm為機(jī)械功率;Pe為電磁功率;Δf為系統(tǒng)頻率偏差。
通常采用頻率變化率(Rate of Change of Frequency,RoCoF)、最大頻率偏差和穩(wěn)態(tài)頻率偏差等作為電力系統(tǒng)的頻率響應(yīng)指標(biāo)[25],其中最大頻率偏差和頻率變化率可作為電網(wǎng)中保護(hù)裝置的觸發(fā)信號。最大頻率偏差主要與一次調(diào)頻的調(diào)頻參數(shù)相關(guān),同時(shí)受系統(tǒng)等效慣量的影響,我國要求最大頻率偏差不超過0.2~0.5 Hz。穩(wěn)態(tài)頻率偏差取決于系統(tǒng)調(diào)差系數(shù)。
1.2 電力系統(tǒng)各調(diào)頻單元的頻率響應(yīng)模型
1.2.1 風(fēng)電機(jī)組頻率響應(yīng)模型
與同步發(fā)電機(jī)相比,變速風(fēng)力發(fā)電機(jī)的運(yùn)行速度范圍更大。通過對風(fēng)電機(jī)組施加虛擬慣性控制,根據(jù)系統(tǒng)頻率變化改變轉(zhuǎn)子轉(zhuǎn)速,將存儲的旋轉(zhuǎn)動能轉(zhuǎn)化為電磁功率。慣性響應(yīng)速度比一次調(diào)頻更快,可以抑制功率擾動時(shí)頻率的快速下降,但持續(xù)的時(shí)間尺度短。風(fēng)電滲透率的增加也將降低系統(tǒng)的一次調(diào)頻能力,通過風(fēng)機(jī)槳距角控制,使風(fēng)電機(jī)組留有備用容量參與一次調(diào)頻,其頻率響應(yīng)特性與傳統(tǒng)機(jī)組的調(diào)速器類似,但響應(yīng)速度較慢。兩類控制方式的傳遞函數(shù)分別為
式中:kd為虛擬慣量響應(yīng)控制系數(shù);Tw為低通濾波器時(shí)間常數(shù);ΔPω為風(fēng)電機(jī)組虛擬慣量響應(yīng)增發(fā)功率;kp為一次調(diào)頻響應(yīng)控制系數(shù);Tβ為變槳距響應(yīng)時(shí)間常數(shù);ΔPβ為風(fēng)電機(jī)組一次調(diào)頻響應(yīng)增發(fā)功率。
單獨(dú)使用槳距角控制會加劇棄風(fēng)現(xiàn)象,而單獨(dú)采用虛擬慣性控制,當(dāng)轉(zhuǎn)子恢復(fù)轉(zhuǎn)速時(shí),可能會產(chǎn)生二次擾動,造成二次頻率下降。同時(shí)采取虛擬慣性控制和槳距角控制,能發(fā)揮風(fēng)電機(jī)組的調(diào)頻能力,使風(fēng)力發(fā)電機(jī)組兼具慣性響應(yīng)能力和一次調(diào)頻能力,降低風(fēng)機(jī)并網(wǎng)對頻率穩(wěn)定性的影響。儲能系統(tǒng)的響應(yīng)快速和輸出靈活的特性,彌補(bǔ)了風(fēng)電場調(diào)頻能力的不足[15]。
1.2.2 儲能頻率響應(yīng)模型儲
能參與頻率響應(yīng)的傳遞函數(shù)為

式中:kbp,kbd分別為慣量響應(yīng)和一次調(diào)頻響應(yīng)控制系數(shù);Tb為儲能系統(tǒng)響應(yīng)時(shí)間常數(shù),通常遠(yuǎn)小于風(fēng)電機(jī)組和火電機(jī)組的響應(yīng)時(shí)間常數(shù);ΔPB為儲能系統(tǒng)參與調(diào)頻時(shí)的增發(fā)功率。
1.2.3 電動汽車頻率響應(yīng)模型
電動汽車充放電行為的可調(diào)性可用于系統(tǒng)頻率支撐[22]。當(dāng)電動汽車參與一次調(diào)頻控制時(shí),其頻率響應(yīng)特性為
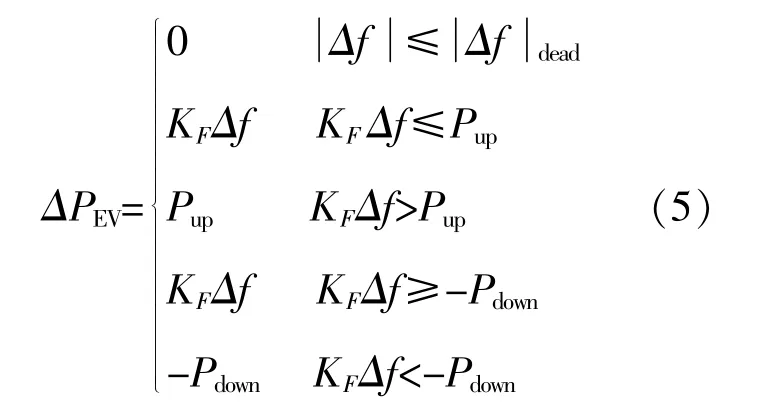
考慮儲能系統(tǒng)實(shí)際運(yùn)行時(shí)的荷電狀態(tài),建立電動汽車充電負(fù)荷的隨機(jī)分布概率模型為[26]
式中:SOCmax和SOCmin分別為電動汽車蓄電池荷電狀態(tài)的上限和下限,分別取0.9和0.1。
本文各調(diào)頻單元的系統(tǒng)綜合頻率響應(yīng)模型如圖1所示。
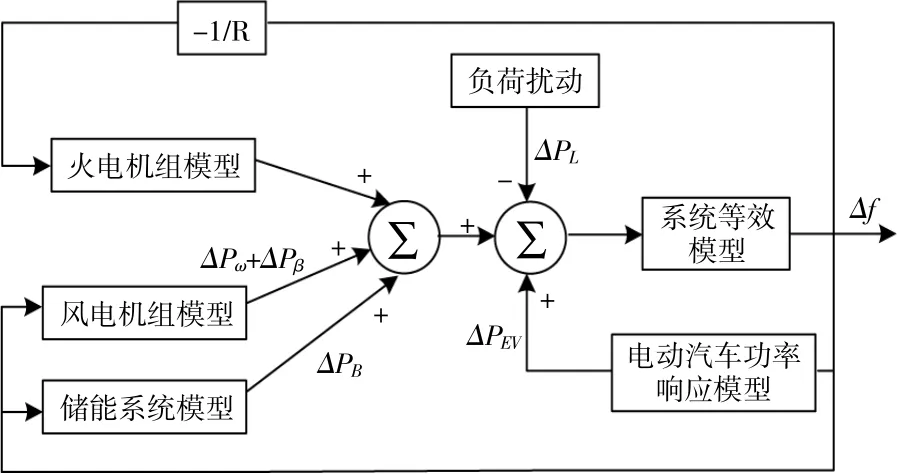
圖1 系統(tǒng)頻率響應(yīng)模型Fig.1 System frequency response model
2 風(fēng)電-儲能-電動汽車聯(lián)合調(diào)頻控制策略
目前,電力系統(tǒng)中火電機(jī)組和水電機(jī)組參與調(diào)頻一般根據(jù)裝機(jī)容量占比分配相應(yīng)的調(diào)頻附加功率。風(fēng)儲系統(tǒng)將作為整體參與調(diào)頻任務(wù)的分配。設(shè)K為風(fēng)儲調(diào)頻時(shí)儲能系統(tǒng)的分配系數(shù),則1-K為風(fēng)電機(jī)組的分配系數(shù)。基于頻率穩(wěn)定性,以頻率偏差最小,即頻率最低點(diǎn)最大為目標(biāo),求取最優(yōu)分配系數(shù)K的流程如圖2所示。
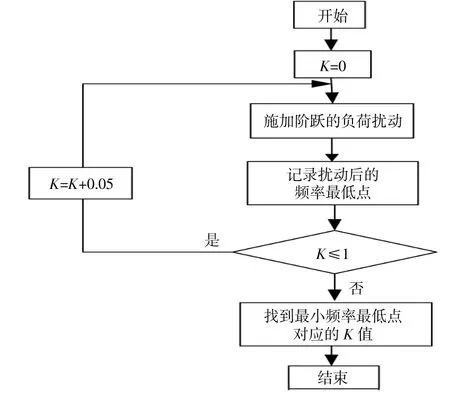
圖2 K的優(yōu)化流程圖Fig.2 The optimization of coefficient K
風(fēng)儲系統(tǒng)參與調(diào)頻時(shí),風(fēng)電機(jī)組與儲能系統(tǒng)能夠按照最優(yōu)分配系數(shù)分配調(diào)頻任務(wù),風(fēng)電機(jī)組提供虛擬慣量響應(yīng)及一次調(diào)頻響應(yīng),儲能系統(tǒng)彌補(bǔ)槳距角控制響應(yīng)慢的不足,提供快速響應(yīng),兩者聯(lián)合與火電、水電機(jī)組共同參與系統(tǒng)一次調(diào)頻[28]。
當(dāng)系統(tǒng)頻率偏差超過限值,電動汽車可減少充電功率甚至向電網(wǎng)主動饋電以參與調(diào)頻。荷電狀態(tài)能夠代表潛在的調(diào)頻能力和用戶充電需求的強(qiáng)弱,SOC越大意味著能夠?yàn)檎{(diào)頻提供更長時(shí)間的功率支撐,且充電需求較弱。另外,隨著系統(tǒng)頻率偏差變大,對系統(tǒng)調(diào)頻能力提出更高的要求。為了在電動汽車參與頻率響應(yīng)的過程中同時(shí)考慮用戶需求,合理利用電動汽車調(diào)頻單元,根據(jù)電網(wǎng)頻率偏差的情況,調(diào)頻系數(shù)采用階梯變系數(shù)。
本文依據(jù)電動汽車的荷電狀態(tài),將電動汽車劃分為A,B,C 3種調(diào)頻模式,分別對應(yīng)的荷電狀態(tài)區(qū)間為0.5~0.9,0.3~0.5,0.1~0.3,不同模式采用不同的調(diào)頻系數(shù)。調(diào)頻系數(shù)選擇如圖3所示,其中,A模式作為基礎(chǔ)調(diào)頻策略,B,C調(diào)頻模式調(diào)頻系數(shù)的選擇在A模式的基礎(chǔ)上右移。
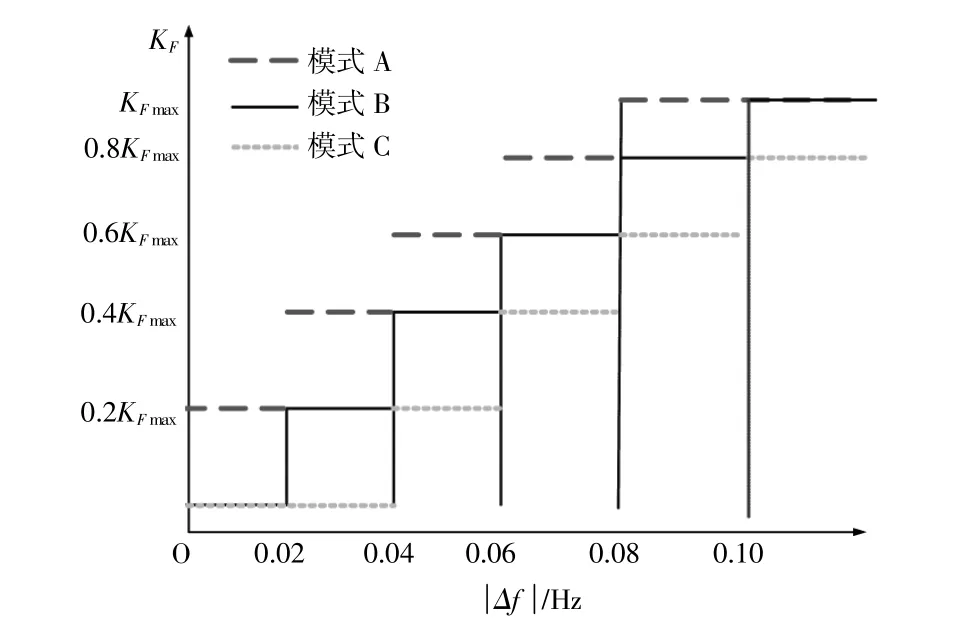
圖3 頻率響應(yīng)控制策略中KF的選擇Fig.3 The choice of KF in frequency response control strategy
頻率偏差的允許值為0.2~0.5 Hz,但實(shí)際頻率控制性能較好,頻率偏差超過0.1 Hz時(shí),調(diào)頻系數(shù)取最大值KFmax,即:
當(dāng)檢測到系統(tǒng)頻率偏差不為0時(shí),參與調(diào)頻的電動汽車根據(jù)其荷電狀態(tài)選擇調(diào)頻模式,然后選擇該模式下頻率偏差所在區(qū)間對應(yīng)的調(diào)頻系數(shù),一個(gè)頻率檢測周期后重復(fù)該過程。值得注意的是,本文電動汽車調(diào)頻過程中的調(diào)頻模式和調(diào)頻系數(shù)將根據(jù)頻率偏差的大小和荷電狀態(tài)的變化進(jìn)行調(diào)整,如圖4所示。
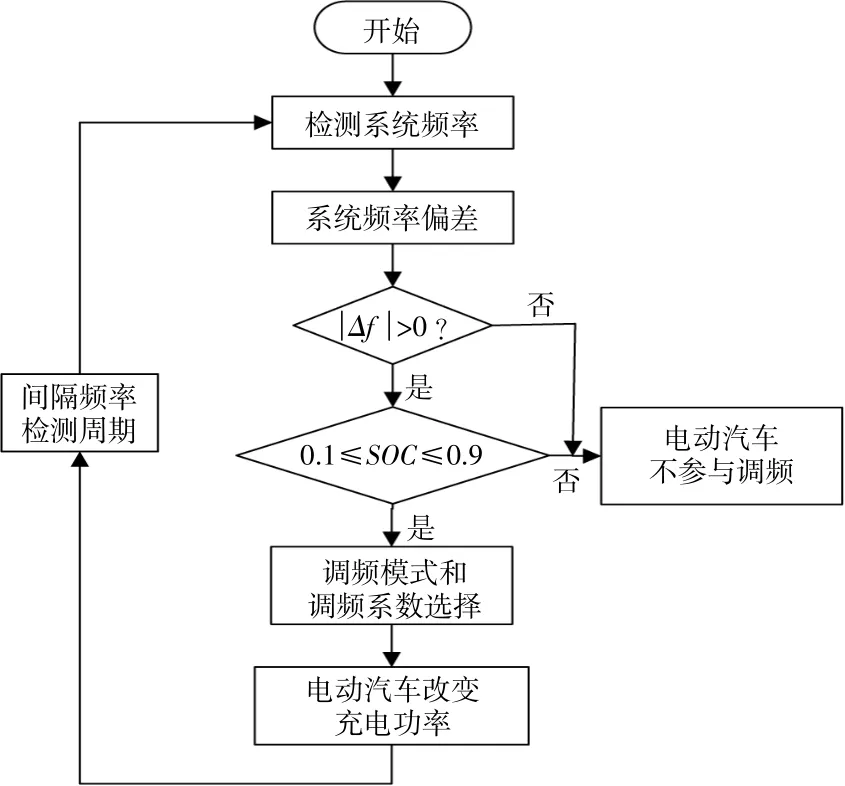
圖4 電動汽車參與調(diào)頻的流程圖Fig.4 Flow chart of electric vehicles participating in frequency modulation
3 算例分析
本文以單區(qū)域電力系統(tǒng)進(jìn)行仿真分析,基于MATLAB/Simulink建立了含火電、風(fēng)電、儲能系統(tǒng)、電動汽車參與電力系統(tǒng)頻率調(diào)節(jié)的控制模型,相關(guān)參數(shù)如表1所示。
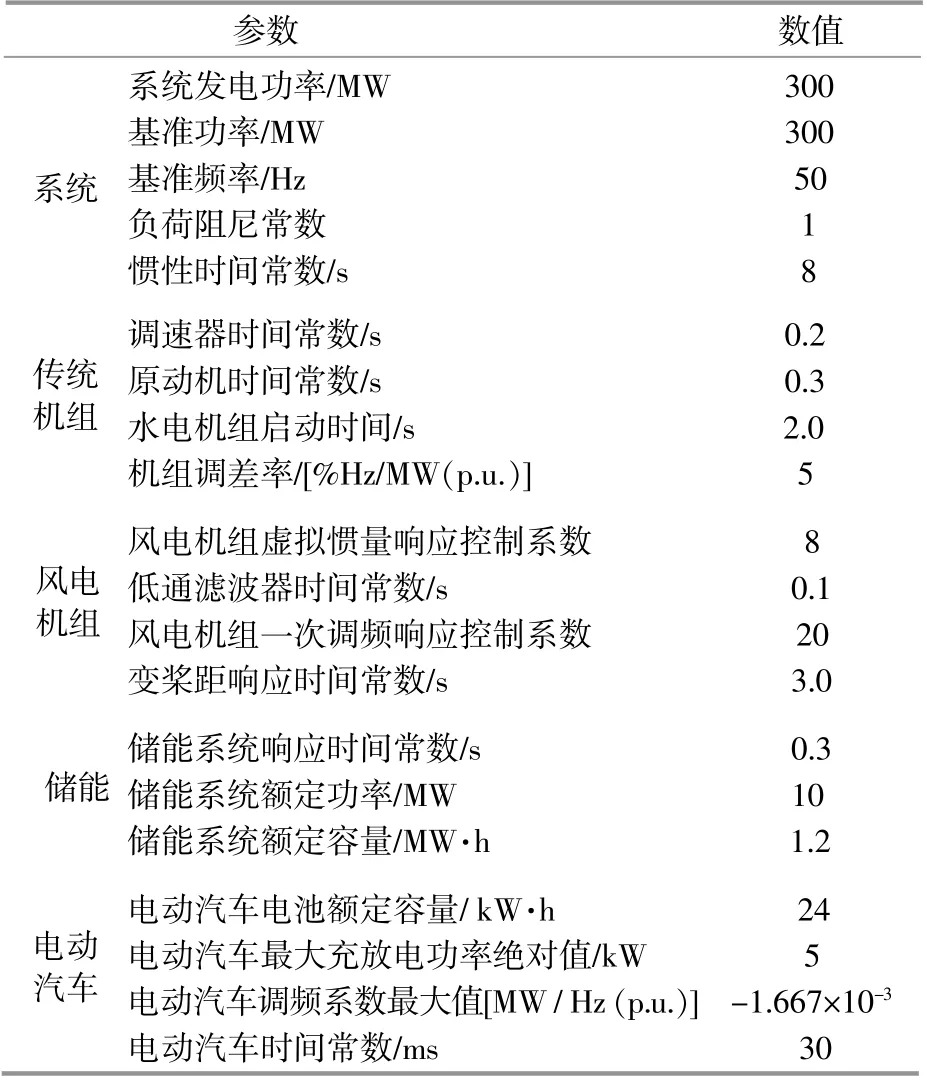
表1 系統(tǒng)中頻率控制的相關(guān)參數(shù)Table 1 Related parameters of frequency control in the system
本文的系統(tǒng)負(fù)荷為300 MW,設(shè)基準(zhǔn)功率為300 MW,風(fēng)電場額定功率為60 MW,系統(tǒng)中接入5 000臺電動汽車,電動汽車選用錳酸鉀電池的純電動汽車。本文設(shè)置以下4種場景:場景1為風(fēng)電機(jī)組不參與調(diào)頻;場景2為風(fēng)電機(jī)組參與調(diào)頻;場景3為風(fēng)-儲聯(lián)合調(diào)頻;場景4為風(fēng)-儲-電動汽車聯(lián)合調(diào)頻。另外,儲能系統(tǒng)的分配系數(shù)為0.5,電動汽車的初始荷電狀態(tài)設(shè)置為0.4。
3.1 風(fēng)電滲透率對電力系統(tǒng)頻率的影響
場景1考慮不同風(fēng)電滲透率下,系統(tǒng)在0.05 p.u.負(fù)荷擾動時(shí)的頻率動態(tài)過程。仿真過程中使用風(fēng)電機(jī)組同比例地替換火電機(jī)組和水電機(jī)組,將電力系統(tǒng)中的風(fēng)電滲透率分別設(shè)置為0,20%,30%,40%,仿真結(jié)果如圖5所示。
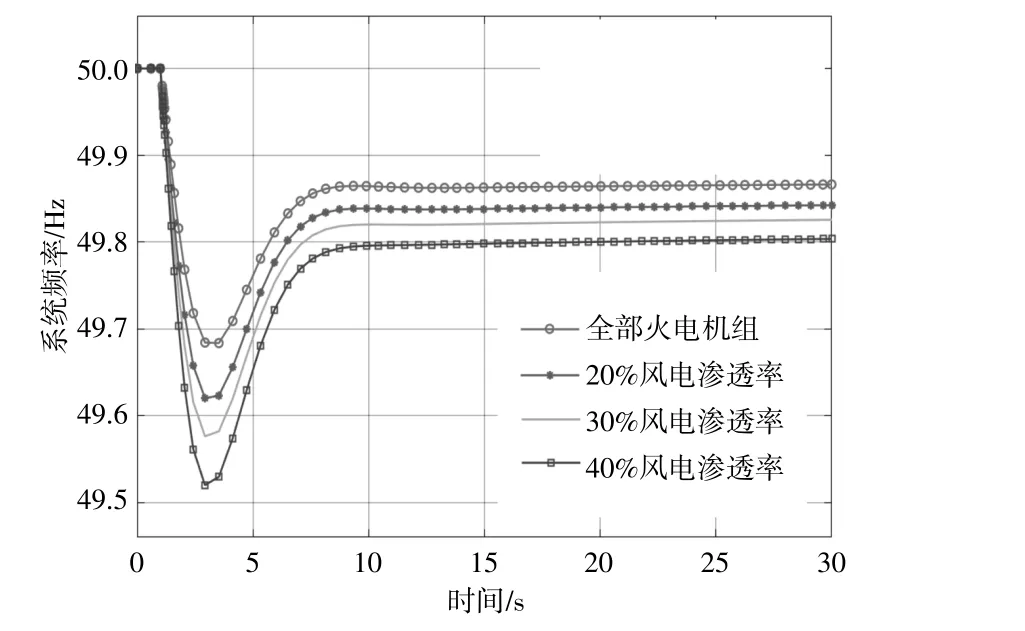
圖5 不同風(fēng)電滲透率下系統(tǒng)頻率響應(yīng)Fig.5 System frequency response under different wind power penetration
由圖5可知,在不同風(fēng)電滲透率下,系統(tǒng)的頻率響應(yīng)特性呈規(guī)律性變化。隨著風(fēng)電滲透率的不斷提高,系統(tǒng)的慣量響應(yīng)和一次調(diào)頻能力下降,擾動后瞬間的頻率變化率、最大頻率偏差和穩(wěn)態(tài)頻率偏差都增大,當(dāng)風(fēng)電滲透率為40%時(shí)頻率最低點(diǎn)接近49.5 Hz,嚴(yán)重威脅系統(tǒng)頻率的穩(wěn)定性。為了提高系統(tǒng)對風(fēng)電的極限承載力,除同步發(fā)電機(jī)外其他調(diào)頻單元有必要參與系統(tǒng)調(diào)頻控制。
3.2 大擾動下風(fēng)電-儲能-電動汽車聯(lián)合調(diào)頻
設(shè)t=1 s時(shí),負(fù)荷突增20 MW(0.05 p.u.),4種場景的系統(tǒng)頻率響應(yīng)曲線和場景4下風(fēng)電機(jī)組、儲能系統(tǒng)、電動汽車參與調(diào)頻后輸出功率的變化如圖6所示。由圖可知,與場景1只有火電機(jī)組提供調(diào)頻控制的情況相比,其余3種場景下的頻率響應(yīng)特性均得到明顯改善,顯著提高了頻率最低點(diǎn),減緩了頻率下降速度,提高了系統(tǒng)等效慣量和一次調(diào)頻能力。場景2對風(fēng)電機(jī)組的調(diào)頻控制使得系統(tǒng)的穩(wěn)態(tài)頻率偏差降低,但在頻率恢復(fù)后頻率出現(xiàn)第二個(gè)極小值點(diǎn),這是由于風(fēng)機(jī)轉(zhuǎn)速恢復(fù)吸收動能,同時(shí)頻率偏差的減小使得一次調(diào)頻增發(fā)功率減少,導(dǎo)致風(fēng)電機(jī)組調(diào)頻能力下降。場景3利用儲能輔助風(fēng)電機(jī)組調(diào)頻,減小頻率響應(yīng)中出現(xiàn)多個(gè)極小值點(diǎn)的可能。與場景2對比,儲能主要在頻率穩(wěn)定之前發(fā)揮作用,因此其穩(wěn)態(tài)頻率基本沒有提高。場景4的風(fēng)電-儲能-電動汽車聯(lián)合控制策略則增加了需求側(cè)響應(yīng),穩(wěn)態(tài)頻率為49.90 Hz,頻率最低點(diǎn)為49.76 Hz,對比其他3種場景,分別提高了0.12,0.06,0.02 Hz,調(diào)頻效果最優(yōu)。
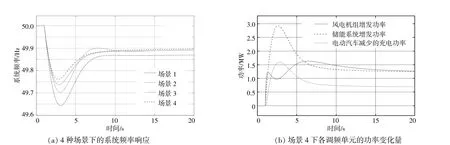
圖6 仿真結(jié)果Fig.6 Simulation results
由圖6(b)可知,除常規(guī)機(jī)組外,風(fēng)電機(jī)組承擔(dān)著重要的調(diào)頻任務(wù)。風(fēng)電機(jī)組的虛擬慣量響應(yīng)動作最快,并在調(diào)頻開始增發(fā)功率即可達(dá)到極大值點(diǎn),能夠有效抑制頻率的快速下跌。隨著頻率進(jìn)一步下降,儲能增發(fā)功率快速上升,彌補(bǔ)了風(fēng)電機(jī)組慣量響應(yīng)支撐時(shí)間短和槳距角響應(yīng)速度慢的不足。電動汽車參與一次調(diào)頻,減少充電功率,在擾動后1~3 s電動汽車減少的充電功率大于風(fēng)電機(jī)組增發(fā)功率,彌補(bǔ)了風(fēng)電機(jī)組在短暫的功率支撐后因一次調(diào)頻能力響應(yīng)較慢引起的出力下降。
另外,在場景4下風(fēng)電機(jī)組采用兩種控制策略,即在策略1中,采用了虛擬慣性控制和槳距角控制,在策略2中只應(yīng)用虛擬慣性控制。兩種策略下風(fēng)電機(jī)組在0.05 p.u.負(fù)載擾動下的電力系統(tǒng)頻率響應(yīng)指標(biāo)如表2所示。兩種策略下各調(diào)頻單元輸出功率的變化如圖7所示。

表2 頻率響應(yīng)指標(biāo)Table 2 Frequency Response Indicators
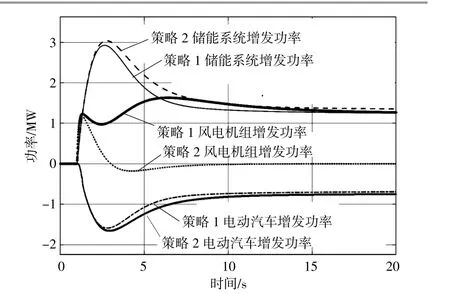
圖7 策略1,2下各調(diào)頻單元增發(fā)功率Fig.7 Additional power of each FM unit under strategy 1 and 2
由表2和圖7可見,擾動開始1 s內(nèi),風(fēng)電機(jī)組一次調(diào)頻響應(yīng)速度較慢,兩種策略下各調(diào)頻單元的出力相同。由于風(fēng)電機(jī)組在提供短期的功率支撐后迅速下降,過頻率最低點(diǎn)后需要從系統(tǒng)中吸收功率,更需要儲能系統(tǒng)和電動汽車的輔助調(diào)頻作用。策略1的穩(wěn)態(tài)頻率和頻率最低點(diǎn)兩個(gè)頻率指標(biāo)比策略2分別提高了0.01,0.01 Hz,頻率的動態(tài)過程表現(xiàn)更優(yōu)。
3.3 負(fù)荷波動下風(fēng)電-儲能-電動汽車聯(lián)合調(diào)頻
為了驗(yàn)證提出的控制策略在正常運(yùn)行時(shí)參與頻率控制的可靠性,負(fù)荷波動為隨機(jī)生成,并服從期望為0,標(biāo)準(zhǔn)差為0.3 MW(0.001 p.u.)的正態(tài)分布。在場景1,4下的系統(tǒng)頻率響應(yīng)情況如圖8所示。從最大頻率偏差的絕對值、頻率方差及頻率波動率3個(gè)指標(biāo)來判斷調(diào)頻控制策略的性能,如表3所示。

表3 頻率表現(xiàn)指標(biāo)Table 3 Frequency Performance Indicators
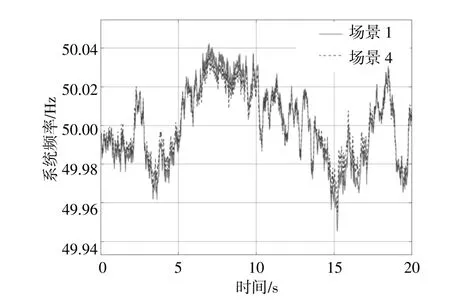
圖8 負(fù)荷波動時(shí)場景1,4下的系統(tǒng)頻率響應(yīng)Fig.8 System frequency response under scenarios 1 and 4 when the load fluctuates
仿真結(jié)果表明,采用風(fēng)電-儲能-電動汽車聯(lián)合參與系統(tǒng)調(diào)頻的控制策略后,在同樣的負(fù)荷擾動下,系統(tǒng)頻率最大頻率偏差的絕對值減小,頻率偏差的均方根減小,頻率集中于50 Hz附近。聯(lián)合控制調(diào)頻也能夠降低在穩(wěn)態(tài)運(yùn)行時(shí)負(fù)荷波動對頻率的影響。另外,從表3的頻率波動率指標(biāo)可以發(fā)現(xiàn),場景4的波動性稍大,這是因?yàn)檎{(diào)頻控制策略增加了系統(tǒng)的等效慣量,對頻率的變化更加敏感,頻率控制動作更頻繁。
4 結(jié)束語
本文提出風(fēng)電機(jī)組、儲能系統(tǒng)、電動汽車的聯(lián)合系統(tǒng)調(diào)頻控制策略,改善了高風(fēng)電滲透電力系統(tǒng)的頻率響應(yīng)特性。仿真結(jié)果表明,負(fù)荷發(fā)生變化時(shí),風(fēng)電-儲能-電動汽車聯(lián)合控制策略與單獨(dú)使用風(fēng)電機(jī)組和風(fēng)電儲能聯(lián)合控制策略相比較,能有效提高系統(tǒng)等效慣性和一次調(diào)頻響應(yīng)能力,在仿真算例中頻率最低點(diǎn)、頻率變化率、穩(wěn)態(tài)偏差指標(biāo)分別提高0.12 Hz,0.04 Hz/s,0.03 Hz。對風(fēng)電機(jī)組只進(jìn)行虛擬慣性控制,過頻率最低點(diǎn)后需要從系統(tǒng)中吸收功率,不利于系統(tǒng)的調(diào)頻,槳距角控制和與儲能聯(lián)合調(diào)頻能夠彌補(bǔ)該不足以改善調(diào)頻效果。電動汽車的集群響應(yīng)響應(yīng)速度快,可以發(fā)揮需求側(cè)的調(diào)頻潛力。電動汽車與風(fēng)儲系統(tǒng)的聯(lián)合調(diào)頻策略在正常負(fù)荷波動情況下的頻率波動和頻率偏差的方差較小,提高了系統(tǒng)正常運(yùn)行下的頻率質(zhì)量。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32