基于擴(kuò)展觀測(cè)器的電液負(fù)載模擬器自適應(yīng)魯棒控制
2021-12-29 07:34:46劉鑫宇趙海鳴
上海理工大學(xué)學(xué)報(bào) 2021年6期
鄒 璇, 劉鑫宇, 趙海鳴, 沈 偉
(1.中國(guó)船舶集團(tuán)公司第七〇三研究所,哈爾濱 150000;2.上海理工大學(xué) 機(jī)械工程學(xué)院,上海 200093)
電液負(fù)載模擬器具有響應(yīng)快、跟蹤精度高和輸出能力大[1]的優(yōu)點(diǎn),被廣泛應(yīng)用于航空航天、汽車工業(yè)等領(lǐng)域[2-4]。然而,作為典型的非線性時(shí)變系統(tǒng)[5],電液負(fù)載模擬器具有復(fù)雜的建模不確定性,包括參數(shù)時(shí)變性、無(wú)法建模的非線性因素,同時(shí)還會(huì)受到來(lái)自舵機(jī)系統(tǒng)的運(yùn)動(dòng)干擾,這極大地增加了開(kāi)發(fā)高精度和高性能控制器的難度。為了解決上述問(wèn)題,眾多先進(jìn)的非線性控制策略相繼被提出,例如,采用滑模變結(jié)構(gòu)控制策略克服無(wú)法建模的模型不確定性[6-7]、采用自適應(yīng)控制策略在線估計(jì)時(shí)變參數(shù)和外部擾動(dòng)[8]、利用觀測(cè)器對(duì)外部擾動(dòng)進(jìn)行觀測(cè)和補(bǔ)償[9-10]等。這些控制策略可以在一定程度上提高電液負(fù)載模擬器的跟蹤性能,然而,在實(shí)際應(yīng)用中,由于采用基于無(wú)噪聲理論的全狀態(tài)反饋設(shè)計(jì),對(duì)位移、速度及加速度等狀態(tài)信號(hào)的測(cè)量行為會(huì)不可避免地將測(cè)量噪聲引入控制器。這些測(cè)量噪聲會(huì)干擾控制器的自適應(yīng)性能和觀測(cè)器的在線估計(jì)效果,從而劣化系統(tǒng)的跟蹤性能表現(xiàn),這成為了進(jìn)一步提高控制精度的障礙。
為了降低測(cè)量噪聲,Sadegh等[11]提出了一種基于期望軌跡補(bǔ)償?shù)目刂撇呗裕ㄟ^(guò)構(gòu)造不含測(cè)量噪聲的狀態(tài)變量的期望值來(lái)代替被污染的實(shí)際狀態(tài),從而有效地降低測(cè)量噪聲對(duì)系統(tǒng)的影響。文獻(xiàn)[12-13]將該補(bǔ)償技術(shù)引入到自適應(yīng)控制器的設(shè)計(jì)中,提出了基于期望軌跡補(bǔ)償?shù)淖赃m應(yīng)魯棒控制策略并應(yīng)用于電機(jī)系統(tǒng),Yao等[14]也將這種技術(shù)運(yùn)用到電液執(zhí)行器的運(yùn)動(dòng)控制當(dāng)中,并取得了較好的效果。然而,在對(duì)外部干擾的處理上,該策略只是簡(jiǎn)單地將其作為時(shí)變參數(shù)進(jìn)行自適應(yīng)估計(jì),自適應(yīng)效果只依賴于狀態(tài)誤差,這對(duì)于系統(tǒng)跟蹤精度的提升是有限的。
基于以上問(wèn)題,本文提出了一種基于擴(kuò)展觀測(cè)器的自適應(yīng)魯棒控制器,將未知的外部干擾擴(kuò)展為系統(tǒng)的高階狀態(tài),并對(duì)其進(jìn)行估計(jì)和補(bǔ)償,同時(shí),將實(shí)際的狀態(tài)變量值替換為對(duì)應(yīng)的期望信號(hào)值,并將其集成到自適應(yīng)模型補(bǔ)償器和擴(kuò)展觀測(cè)器中以降低測(cè)量噪聲的影響,同時(shí)提升控制器的自適應(yīng)性能和觀測(cè)器的觀測(cè)性能,觀測(cè)器的系統(tǒng)參數(shù)由控制器的參數(shù)自適應(yīng)率獲得。此外,控制器中還引入了一個(gè)虛擬的誤差變量,以使控制器獲得額外的設(shè)計(jì)自由度,從而獲得更高的控制性能。最后,利用Lyapunov理論證明了該控制策略的穩(wěn)定性。仿真結(jié)果驗(yàn)證了該控制器不僅具有出色的跟蹤性能,還具有較強(qiáng)的魯棒性。
1 電液負(fù)載模擬器系統(tǒng)模型
系統(tǒng)模型如圖1所示,左側(cè)為電液負(fù)載模擬器,右側(cè)為舵機(jī)系統(tǒng)。系統(tǒng)工作時(shí),舵機(jī)系統(tǒng)會(huì)對(duì)負(fù)載模擬器施加額外的運(yùn)動(dòng)干擾。慣性負(fù)載的動(dòng)力學(xué)方程為
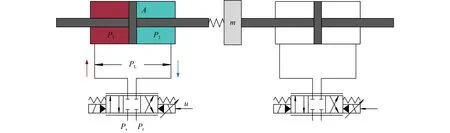
圖1 電液負(fù)載模擬器結(jié)構(gòu)示意圖Fig.1 Schematic diagram of the structure of electro-hydraulic load simulator

式中:m與y分別為負(fù)載的質(zhì)量和位移;PL為負(fù)載壓力,PL=P1?P2;A為液壓缸的有效作用面積;Cf(y˙)為連續(xù)的摩擦模型函數(shù);Am為摩擦振幅;B為黏性阻尼系數(shù);d(t,y,y˙)表示總的模型不確定性,包括由舵機(jī)系統(tǒng)產(chǎn)生的外部擾動(dòng)和無(wú)法測(cè)量的建模誤差。
液壓缸的壓力動(dòng)態(tài)方程為

式中:V為液壓缸兩腔的總?cè)莘e; βe表示液壓油的有效體積模量;Ct是液壓缸的內(nèi)部泄漏系數(shù);Q(t)為未建模的流量誤差;kt是控制輸入電壓u的總流量增益;Ps是 供油壓力;Pr為回油壓力;sgn(u)為不連續(xù)的符號(hào)函數(shù)。

系統(tǒng)末端的輸出力

式中,k為力傳感器的彈簧勁度系數(shù)。
定義狀態(tài)變量為x=[x1,x2,x3]T=[y,y˙,APL/m]T,則整個(gè)系統(tǒng)可以由以下?tīng)顟B(tài)空間方程表述:
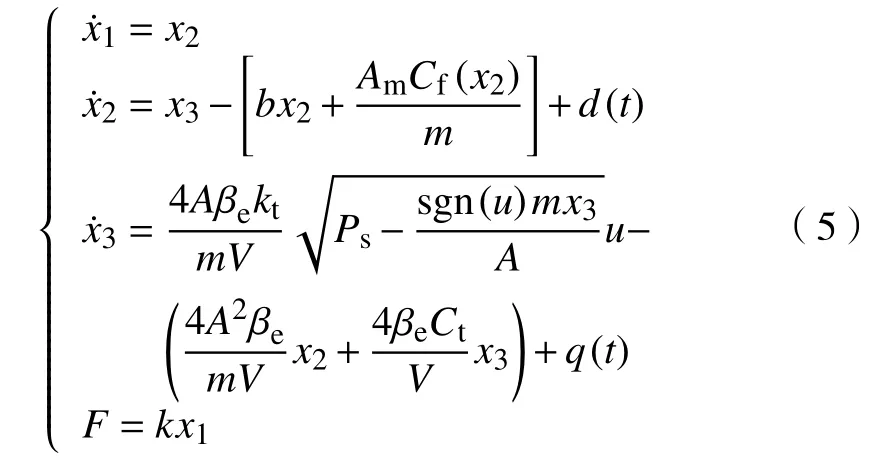
其中,

2 自適應(yīng)魯棒控制器設(shè)計(jì)
2.1 參數(shù)自適應(yīng)算法設(shè)計(jì)
由于實(shí)際應(yīng)用中,液壓系統(tǒng)參數(shù)會(huì)因?yàn)楣ぷ鳝h(huán)境變化而出現(xiàn)波動(dòng),為了減少系統(tǒng)的參數(shù)不確定性以及提高跟蹤性能,在控制器設(shè)計(jì)中引入了參數(shù)自適應(yīng)算法。定義一組未知參數(shù)集:θ=[θ1,θ2,θ3,θ4,θ5,θ6]T,其中,θ1=b,θ2=Am/m,θ3=4Aβekt/(mV), θ4=4A2βe/(mV), θ5=4βeCt/V, θ6=qn(t)。由此,描述系統(tǒng)的狀態(tài)空間方程 (5 )可寫(xiě)為

在進(jìn)行控制器設(shè)計(jì)之前,需要作假設(shè)。
假設(shè)1期望運(yùn)動(dòng)軌跡及其導(dǎo)數(shù)均有界。Fd(t)為期望跟蹤的力。此外,系統(tǒng)中外部擾動(dòng)及其導(dǎo)數(shù)、建模誤差均有界,即:

其中, δ1, δ2, δ3均為正數(shù)。
假設(shè)2系統(tǒng)參數(shù)的波動(dòng)范圍為:

式中:?θ為有界開(kāi)集;θmin=[θ1min,···,θ6min]T,θmax=[θ1max,···,θ6max]T,且全部已知。
定義映射函數(shù)

自適應(yīng)律設(shè)計(jì)為

式中, Γ為正定的自適應(yīng)對(duì)角矩陣。
對(duì)于任何函數(shù) τ,該自適應(yīng)率都將滿足以下關(guān)系[15]:

2.2 擴(kuò)展觀測(cè)器設(shè)計(jì)
來(lái)自舵機(jī)系統(tǒng)的運(yùn)動(dòng)干擾d(t)是影響電液負(fù)載模擬器跟蹤性能的主要干擾源,通過(guò)構(gòu)造擴(kuò)展觀測(cè)器[10],將系統(tǒng)內(nèi)的模型不確定性作為系統(tǒng)的高階狀態(tài)來(lái)估計(jì)。

結(jié)合系統(tǒng)模型 (6 ),觀測(cè)器誤差的動(dòng)態(tài)誤差可以表述為



由于A是一個(gè)Hurwitz矩陣,因此,必定存在一個(gè)對(duì)稱正定矩陣P,滿足以下Lyapunov方程:

其中,E為單位矩陣。求解上述等式,可得

2.3 控制器設(shè)計(jì)
現(xiàn)介紹控制器設(shè)計(jì)步驟。
步驟1定義一組誤差變量,
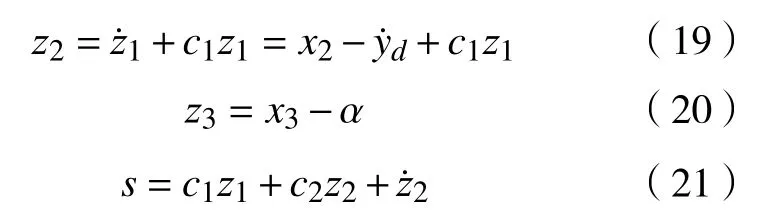
式中:z1為輸出的位移誤差,z1=x1?yd;c1,c2為正反饋增益系數(shù);s為輔助誤差變量,用于獲得額外的控制器設(shè)計(jì)自由度。
在設(shè)計(jì)時(shí),可以將x3視為虛擬輸入量,從而為其合成虛擬控制率 α。將式 (1 9)和式 (2 0)代入式(21),并對(duì)其求導(dǎo),可得

基于式(22),虛擬控制率 α可以設(shè)計(jì)為

式中: αa為基于模型的在線參數(shù)自適應(yīng)前饋補(bǔ)償控制律; αs為待合成的魯棒控制律; ︿xe為觀測(cè)得到的外部擾動(dòng)量。
由于模型存在不確定性,并且自適應(yīng)參數(shù)的估計(jì)值與其真實(shí)值之間存在誤差,因此,需要設(shè)計(jì)魯棒控制律來(lái)穩(wěn)定系統(tǒng)。

式中: αs1用于穩(wěn)定系統(tǒng)的標(biāo)稱模型;k2s是一個(gè)正常數(shù)反饋增益; αs2用于鎮(zhèn)定未知的模型不確定性以及平衡系統(tǒng)的參數(shù)不確定性。
αs3可以是滿足:


條件的任意函數(shù)。
ε1為一個(gè)任意小的常數(shù)。因此, αs3可以被設(shè)計(jì)為如下形式:

式中,k2a為正的常數(shù)反饋增益。
將式(14),(23),(31)代入式(22),可得
步驟2合成系統(tǒng)的實(shí)際控制律u。將式 (6 )的第3式和式 (2 0)代入式 (2 8),可得
在上述的控制器設(shè)計(jì)中,x2被y˙d代替參與了控制器的補(bǔ)償設(shè)計(jì)。為了降低測(cè)量噪聲的干擾,構(gòu)造實(shí)際控制律u還 需要知道x3的期望值信息,從式(6)的第2式可知,x3可被表達(dá)為


考慮到式 (2 3),x3可表達(dá)為

式(29)可寫(xiě)為

其中,

而ua是將要合成的實(shí)際控制律u中的基于模型的自適應(yīng)補(bǔ)償控制律。
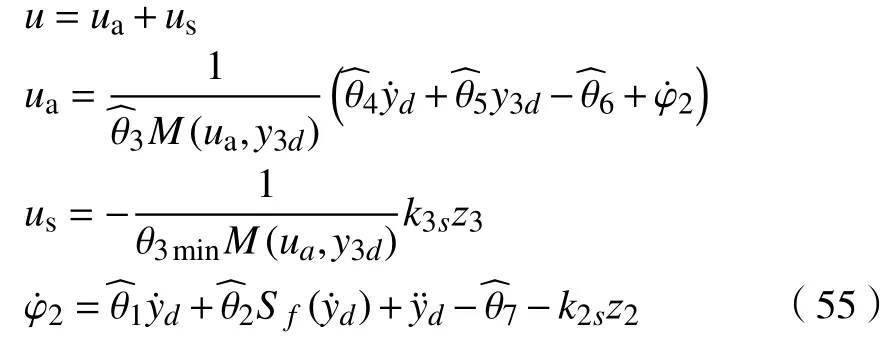
類似于先前的虛擬控制律 α的設(shè)計(jì),最終的實(shí)際控制律u設(shè)計(jì)為
式中:ua為基于模型的自適應(yīng)補(bǔ)償控制律;us1用于穩(wěn)定系統(tǒng)標(biāo)稱模型;us2用于控制系統(tǒng)的模型不確定性和平衡系統(tǒng)的參數(shù)不確定性。

式中,k3s是一個(gè)正常數(shù)增益反饋。
us2可以是滿足

條件的任意函數(shù)。

其中, ε2為一個(gè)任意小的常數(shù)。因此,us2可以被設(shè)計(jì)為

其中,k3a為正的常數(shù)反饋增益。
將式(34)和式(35)代入式(33),可得

2.4 穩(wěn)定性分析

式中, ω1, ω2, ω3, ω4, ω5均為正常數(shù)。
系統(tǒng)參數(shù)的估計(jì)值通過(guò)自適應(yīng)律式(10)進(jìn)行更新,其中, τ被設(shè)計(jì)為

當(dāng)反饋增益c1,c2,k2s,k3s和 μ足夠大時(shí),以下的矩陣將正定:

其中,


由上可知,提出的控制律就能夠保證控制器的收斂性和系統(tǒng)的穩(wěn)定性。
證明當(dāng)h(t)=0且q? (t)=0時(shí),定義Lyapunov函數(shù)VA。

結(jié)合式 (15),(19),(21),(39),(40),并對(duì)式(46)求導(dǎo) 后 同時(shí)引入式 (12),(26),(37), (41)~(43),整理可得

由Young’s不等式,可得:

將式(44),(45)和(49)代入式(48),可得

其中,e=[z1,z2,z3,s,ξ1,ξ2]T。則所有信號(hào)均閉環(huán)有界,控制器是漸近穩(wěn)定的,即t→∞時(shí),z1→0。
當(dāng)h(t)≠0且q? (t)≠0時(shí),定義函數(shù)VB。

對(duì)VB求導(dǎo)后考慮式(25)和式(36),可得

其中, θM= θmax?θmin,由Young’s不等式可得
根據(jù)式(45),式(53)可轉(zhuǎn)換為

從而得到

其中, λ =2λmin(Λ), λmin(Λ)表示正定矩陣 Λ的最小特征值。由上可知,所提出的控制器不僅可以確保所有信號(hào)均為閉環(huán)有界,且呈指數(shù)級(jí)收斂,其收斂速度和最終跟蹤誤差取決于 λ。
3 仿真分析
在MATLAB/Simulink中搭建系統(tǒng)仿真模型并對(duì)提出的控制策略進(jìn)行仿真分析[16],仿真步長(zhǎng)設(shè)置為0.001 s,電液負(fù)載模擬器的仿真參數(shù)如表1所示。
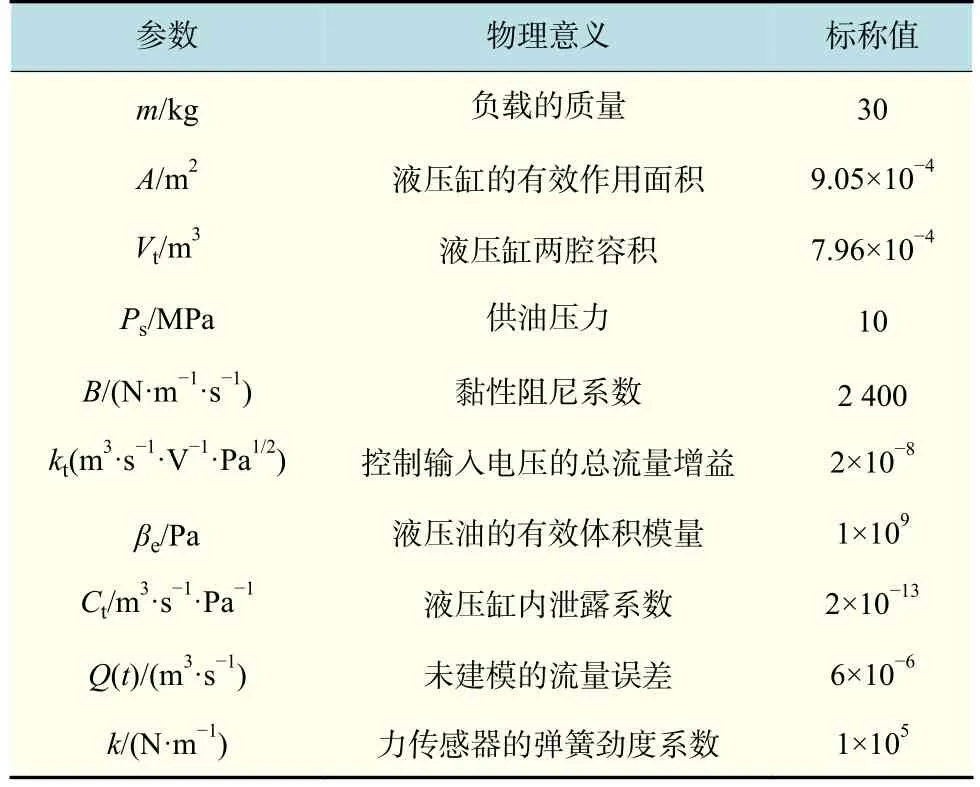
表1 系統(tǒng)仿真參數(shù)Tab.1 Parameters of system simulation
此外,非線性摩擦函數(shù)選擇為

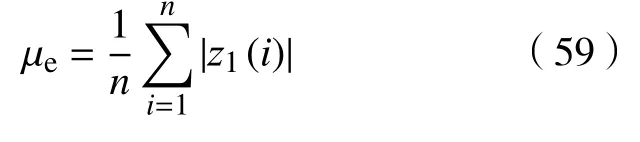
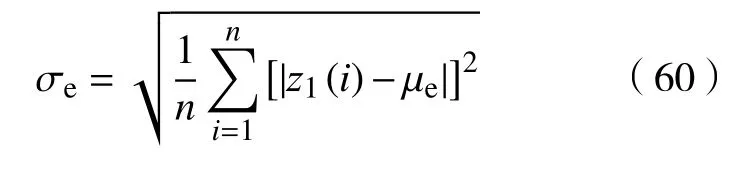
為了驗(yàn)證所提出的控制器的控制效果,選擇3種性能指標(biāo),即最大跟蹤誤差Me、平均跟蹤誤差μe, 跟蹤誤差的標(biāo)準(zhǔn)偏差 σe來(lái)量化各種控制策略的控制性能[17]。同時(shí),選擇本文提出的控制器與PI控制器和DCAC控制器進(jìn)行對(duì)比。
a.ARC-ESO。這是本文提出的具有擴(kuò)展觀測(cè)器的自適應(yīng)魯棒控制器,控制參數(shù)為:c1=400,c2=200,k2s=400,k3s=200,k2a=1,k3a=0.5,μ=1000。105,0,?1000]T,θmax=[250,25,540,4.1×107,1000,1000]T。參數(shù)自適應(yīng)率矩陣Γ =diag{20,1×10?6,5×10?3,50,0.75,10}。
b.PI。PI控制器。通過(guò)試錯(cuò)法調(diào)整的控制器增益為KP=5800,KI=2000。
c.DCAC。具有期望軌跡補(bǔ)償?shù)淖赃m應(yīng)控制器[14],其結(jié)構(gòu)為

其中,y3d為x3的期望值。參數(shù)估計(jì)初始值和其界限以及自適應(yīng)率矩陣為

其余控制參數(shù)與ARC-ESO相同。
仿真實(shí)驗(yàn)分為以下兩種工況:a.舵機(jī)系統(tǒng)未加載時(shí)各控制策略的控制效果對(duì)比;b.舵機(jī)系統(tǒng)加載時(shí)各控制策略的控制效果對(duì)比。仿真測(cè)試中,參考力軌跡設(shè)定為Fd(t)=4000arctan(sin πt)[1?exp(?t)]N。同時(shí),系統(tǒng)位置、速度、壓力信號(hào)均添加了幅值為 1× 10?5的隨機(jī)噪聲信號(hào)[18],以模擬測(cè)量噪聲。
工況1舵機(jī)系統(tǒng)未加載時(shí),外部擾動(dòng)設(shè)定為d(t,y,y˙)=0,3種控制器各自的跟蹤誤差如圖2所示,除根據(jù)系統(tǒng)實(shí)際跟蹤軌跡和期望目標(biāo)軌跡之間的實(shí)時(shí)偏差值評(píng)估控制算法性能外,本文還采用了其他3個(gè)性能指標(biāo)量化估計(jì)每種控制算法的性能,即誤差最大值Me, 誤差平均值 μe,誤差標(biāo)準(zhǔn)偏差 σe。

圖2 3種控制器的跟蹤誤差(工況1)Fig.2 Tracking error of three controllers (condition 1)
a.誤差最大值定義為

其中,i=1,2,···,n,n為所記錄的誤差數(shù)據(jù)的數(shù)量。
b.誤差平均值定義為
c.誤差標(biāo)準(zhǔn)偏差定義為
跟蹤性能指標(biāo)如表2所示。

表2 跟蹤性能指標(biāo)(工況1)Tab.2 Tracking performance metrics (condition 1)
仿真結(jié)果表明,在此工況下,PI控制器作用下系統(tǒng)的跟蹤效果最差,其最大誤差達(dá)到了35 N。相比之下,由于具有基于期望模型補(bǔ)償?shù)那梆伩刂坡桑贒CAC控制器作用下,系統(tǒng)最大穩(wěn)態(tài)誤差為5 N左右。由于引入的輔助誤差變量和自適應(yīng)干擾觀測(cè)器,本文所提出的ARC-ESO控制器具有最佳的跟蹤性能,其最大跟蹤誤差不超過(guò)3 N,而最大穩(wěn)態(tài)誤差不超過(guò)1 N,與其他2種控制器相比,各項(xiàng)性能指標(biāo)都有較大幅度的提升。

表3 跟蹤性能指標(biāo)(工況2)Tab.3 Tracking performance metrics (condition 2)

圖3 3種控制器的跟蹤誤差(工況2)Fig.3 Tracking error of three controllers (condition 2)
仿真結(jié)果表明,當(dāng)系統(tǒng)中加入外負(fù)載擾動(dòng)后,與工況1相比,PI控制器受外負(fù)載擾動(dòng)的影響較小,但PI控制器的跟蹤精度仍然是最低的。而DCAC控制器的控制性能劣化得較為嚴(yán)重,系統(tǒng)最大穩(wěn)態(tài)誤差達(dá)到了16 N,各項(xiàng)性能指標(biāo)都具有大幅度的衰減,盡管DCAC將外負(fù)載干擾作為了系統(tǒng)參數(shù)進(jìn)行自適應(yīng)估計(jì),但自適應(yīng)效果十分有限。而ARC-ESO依然獲得了最佳的控制性能,與工況1相比,在其作用下的系統(tǒng)跟蹤精度衰減非常微小,表明本文所提出的控制策略具有良好的抗干擾能力。
4 結(jié) 論
針對(duì)電液負(fù)載模擬器中傳感器測(cè)量噪聲和未知的外界干擾引起的跟蹤精度不高的問(wèn)題,提出了一種高精度的自適應(yīng)魯棒控制策略。在考慮存在非線性特性和各種建模不確定性的情況下建立了電液負(fù)載模擬器的數(shù)學(xué)模型;通過(guò)構(gòu)造擴(kuò)展觀測(cè)器在線估計(jì)外部干擾并進(jìn)行補(bǔ)償,利用系統(tǒng)各狀態(tài)變量的期望信號(hào)代替實(shí)際狀態(tài)信號(hào),并集成到參數(shù)自適應(yīng)模型補(bǔ)償器中,以減少測(cè)量噪聲對(duì)控制器和觀測(cè)器的影響。同時(shí)通過(guò)引入一個(gè)虛擬的誤差變量來(lái)改進(jìn)控制器結(jié)構(gòu),以提高跟蹤精度。該控制器已通過(guò)Lyapunov方法證明了其閉環(huán)穩(wěn)定性,并利用MATLAB/Simulink進(jìn)行了仿真分析。結(jié)果表明,與PI和DCAC控制器相比,在不存在外部擾動(dòng)的情況下,所提出的控制器能夠達(dá)到更高的跟蹤精度,而在存在外部擾動(dòng)的情況下,所提出的控制器不僅保持了良好的跟蹤性能,同時(shí)具有較強(qiáng)的魯棒性。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45