開槽型盤式異步磁力耦合器調(diào)速特性
2021-12-29 07:00:32楊超君朱莉吳盈志彭志卓邰蔣西張磊
電機(jī)與控制學(xué)報(bào) 2021年11期
楊超君,朱莉,吳盈志,彭志卓,邰蔣西,張磊
(江蘇大學(xué) 機(jī)械工程學(xué)院,江蘇 鎮(zhèn)江 212013)
0 引 言
異步磁力耦合器可通過氣隙的調(diào)控來控制輸出轉(zhuǎn)矩及轉(zhuǎn)速,適用于多種工況,能夠避免傳統(tǒng)傳動(dòng)方式中的摩擦磨損問題,具有節(jié)能性及過載保護(hù)和軟啟動(dòng)等功能,多用于石油、化工等環(huán)境惡劣的領(lǐng)域。異步磁力耦合器在機(jī)械傳動(dòng)中表現(xiàn)出的優(yōu)勢(shì)引起了眾多磁力傳動(dòng)相關(guān)方向?qū)W者的重視[1-7]。
國內(nèi)外許多學(xué)者針對(duì)異步磁力耦合器做了相關(guān)研究,Lubin T等[2]應(yīng)用矢量磁位法推導(dǎo)出盤式異步磁力耦合器的軸向力和轉(zhuǎn)矩的解析表達(dá)式,并分析了磁場(chǎng)分布;Mohammadi等[3]應(yīng)用等效磁路法推導(dǎo)出盤式磁力耦合器磁通密度及轉(zhuǎn)矩的表達(dá)式;Vahid Aberoomand等[4]應(yīng)用等效磁路法推導(dǎo)出雙面永磁軸向渦流耦合器的轉(zhuǎn)矩公式;東華大學(xué)朱姿娜等[5]建立了具有多對(duì)弧形永磁體結(jié)構(gòu)的磁力耦合器的轉(zhuǎn)矩解析模型,對(duì)轉(zhuǎn)矩參數(shù)進(jìn)行了分析;沈陽工業(yè)大學(xué)張炳義等[6]應(yīng)用區(qū)域劃分法對(duì)磁力耦合器的漏磁導(dǎo)進(jìn)行計(jì)算。上述研究致力于耦合器轉(zhuǎn)矩及磁場(chǎng)理論公式的推導(dǎo),為異步磁力耦合器的性能研究奠定了理論基礎(chǔ),但未建立異步磁力耦合器的轉(zhuǎn)差率或輸出轉(zhuǎn)速與氣隙之間的關(guān)系(即調(diào)速關(guān)系),無法通過氣隙厚度的定量調(diào)節(jié)控制從而達(dá)到實(shí)現(xiàn)速度或負(fù)載的調(diào)節(jié)。江蘇大學(xué)楊超君等[7-13]多年來針對(duì)多種結(jié)構(gòu)的磁力耦合器的結(jié)構(gòu)參數(shù)與傳動(dòng)性能、磁場(chǎng)分布以及節(jié)能方面進(jìn)行研究,在此基礎(chǔ)上,近年來也開展了機(jī)械特性、調(diào)速性能的探討,率先提出了調(diào)速關(guān)系模型及調(diào)速特性的研究。其中,文獻(xiàn)[7-10]分別建立了實(shí)心筒式、實(shí)心盤式、鼠籠筒式以及鼠籠(即開槽型)盤式等各類磁力耦合器在恒轉(zhuǎn)矩負(fù)載工況和變轉(zhuǎn)矩負(fù)載工況下的調(diào)速關(guān)系式。但是,上述文獻(xiàn)中對(duì)開槽型盤式異步磁力耦合器(slotted-type axial-flux asynchronous magnetic coupler,SAAMC)調(diào)速特性的研究尚不全面,仍需深入分析探討。
為解決SAAMC的實(shí)際調(diào)速問題,本文以一臺(tái)18極16槽的SAAMC樣機(jī)為例,分析其磁路結(jié)構(gòu)特點(diǎn),采用等效磁路法推導(dǎo)出其轉(zhuǎn)矩表達(dá)式,并建立恒轉(zhuǎn)矩負(fù)載、二次方率負(fù)載,尤其是恒功率負(fù)載工況下的調(diào)速關(guān)系計(jì)算模型,模擬獲得機(jī)械特性、調(diào)速特性曲線,特別是功率特性曲線,并對(duì)三種負(fù)載下的調(diào)速性能進(jìn)行分析,以及對(duì)其進(jìn)行試驗(yàn)研究,分析工作參數(shù)對(duì)SAAMC調(diào)速性能的影響,驗(yàn)證理論模型的正確性。
1 電磁轉(zhuǎn)矩及調(diào)速關(guān)系模型
1.1 基本結(jié)構(gòu)及調(diào)速機(jī)理
SAAMC的結(jié)構(gòu)模型如圖1所示,導(dǎo)體轉(zhuǎn)子由導(dǎo)體及軛鐵兩部分組成,導(dǎo)體加工有扇形槽,裝配于導(dǎo)體軛鐵的齒上,呈現(xiàn)軛鐵與銅導(dǎo)體的交替排列。永磁轉(zhuǎn)子由軸向均勻充磁的扇形永磁體與軛鐵組成,扇形永磁體沿周向N、S極交替排列,安裝在軛鐵表面。其調(diào)速模型如圖2所示,假設(shè)以永磁轉(zhuǎn)子作為主動(dòng)轉(zhuǎn)子,當(dāng)電機(jī)帶動(dòng)主動(dòng)轉(zhuǎn)子轉(zhuǎn)動(dòng)時(shí),主動(dòng)轉(zhuǎn)子和從動(dòng)轉(zhuǎn)子之間產(chǎn)生轉(zhuǎn)速差,導(dǎo)體轉(zhuǎn)子切割磁力線產(chǎn)生感應(yīng)電流,感應(yīng)電流產(chǎn)生的感應(yīng)磁場(chǎng)與原永磁磁場(chǎng)耦合實(shí)現(xiàn)扭矩傳遞。磁力耦合器的結(jié)構(gòu)參數(shù)及材料屬性見表1和表2。
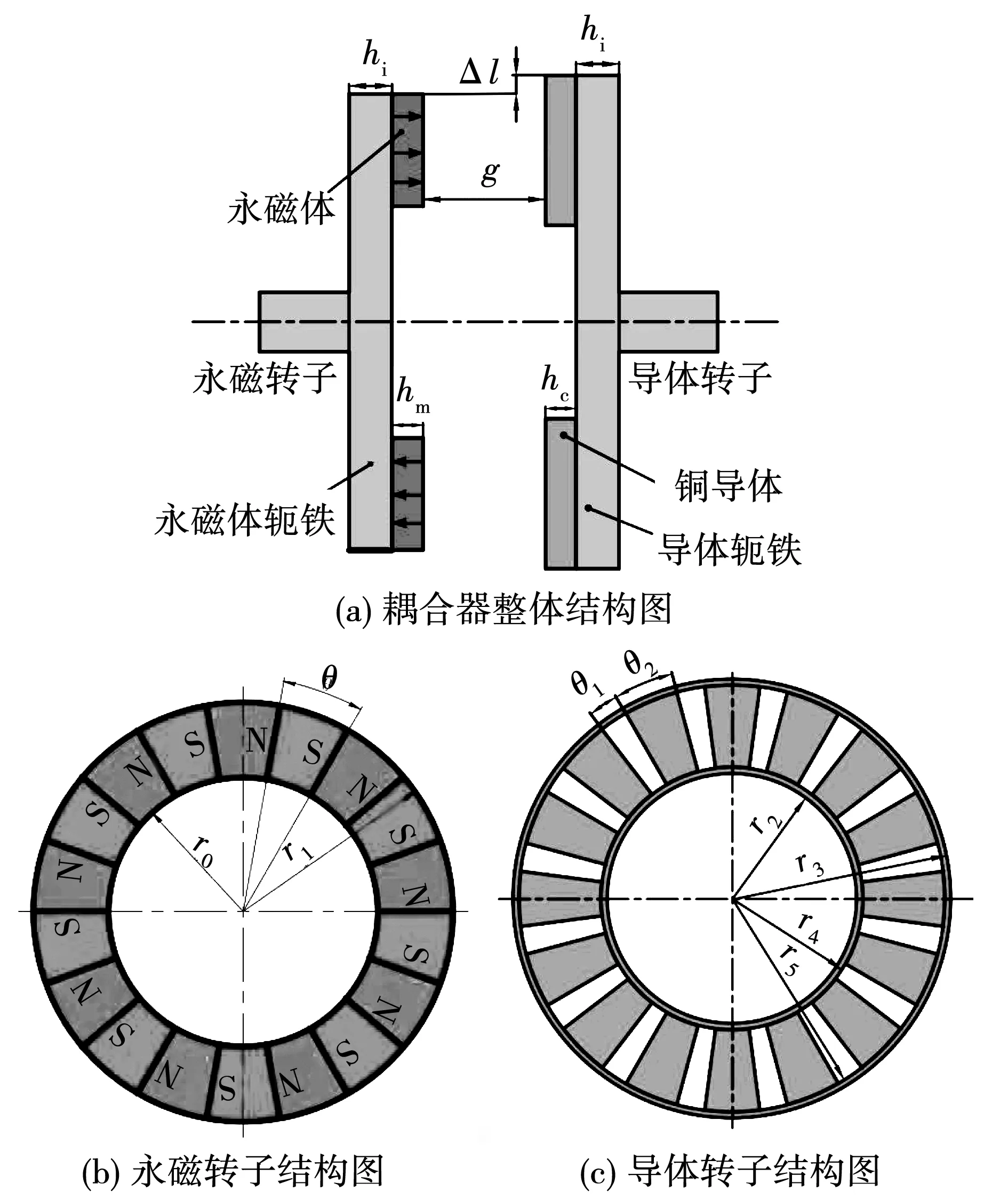
圖1 磁力耦合器結(jié)構(gòu)模型Fig.1 Structural model of the magnetic coupler
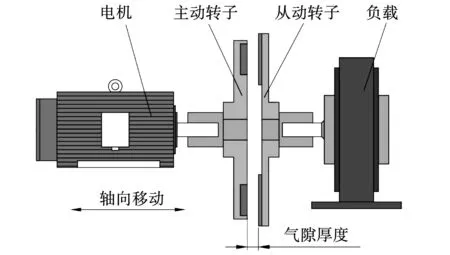
圖2 磁力耦合器調(diào)速模型Fig.2 Speed-control model of the magnetic coupler
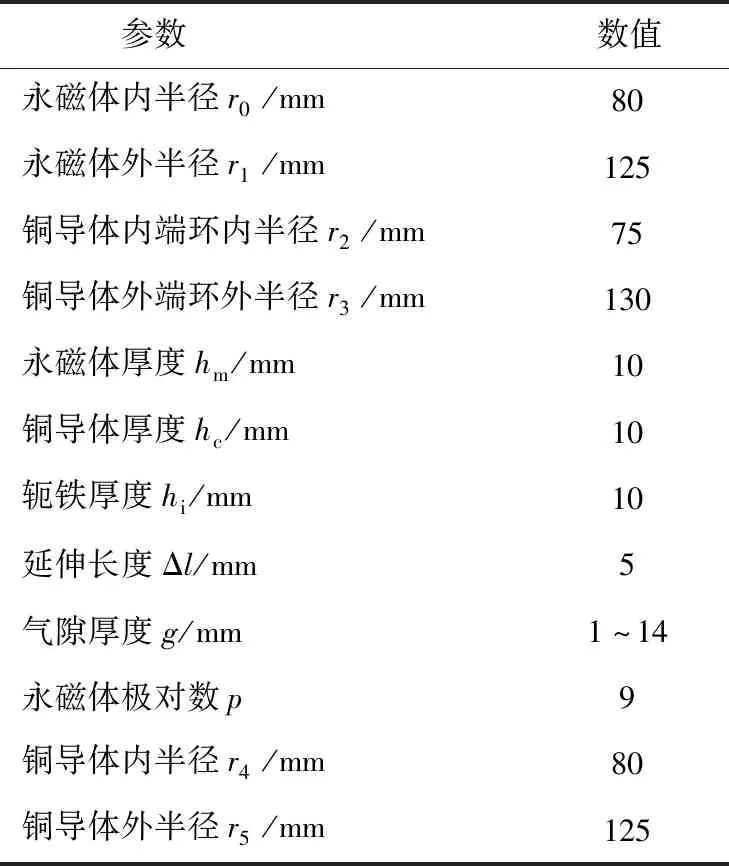
表1 磁力耦合器結(jié)構(gòu)參數(shù)Table 1 Structural parameters of the magnetic coupler
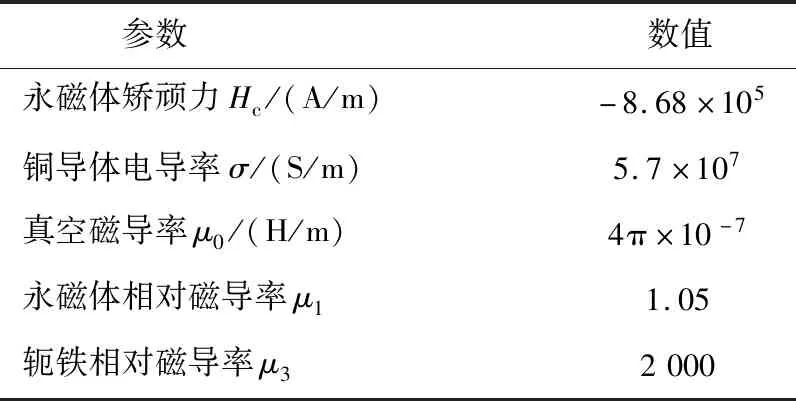
表2 磁力耦合器材料屬性Table 2 Material properties of the magnetic coupler
1.2 電磁轉(zhuǎn)矩計(jì)算公式
為計(jì)算SAAMC的電磁轉(zhuǎn)矩,本文運(yùn)用等效磁路法對(duì)電磁轉(zhuǎn)矩公式進(jìn)行推導(dǎo)。將磁力耦合器在永磁體平均半徑處沿周向展開,從而在此二維展開模型上分析磁力耦合器的磁通路徑。
為便于磁通路徑分析,在進(jìn)行磁場(chǎng)轉(zhuǎn)化為磁路時(shí),做以下假設(shè):
1)主磁通量垂直通過永磁體、氣隙和導(dǎo)體盤;
2)僅考慮耦合器永磁體產(chǎn)生的磁場(chǎng),不考慮感應(yīng)磁場(chǎng)對(duì)原磁場(chǎng)的影響;
3)忽略外界條件對(duì)材料性能的影響,故磁路中各組成部分的材料性能保持不變;
4)磁路中軛鐵不發(fā)生磁飽和,永磁體的磁導(dǎo)率與導(dǎo)體的電導(dǎo)率均為定值。
圖3為磁力耦合器的磁通路徑,主要由3個(gè)部分組成:主磁路Ⅰ、相鄰磁體間漏磁路Ⅱ及單個(gè)永磁體側(cè)面的漏磁路Ⅲ。
根據(jù)圖3所示的磁通路徑,建立SAAMC的等效磁路模型,由于該磁力耦合器的導(dǎo)體盤上存在齒槽,導(dǎo)體與軛鐵交錯(cuò)排布,在耦合器工作的過程中,銅導(dǎo)體層上的磁通路徑經(jīng)過軛鐵和銅兩個(gè)磁導(dǎo)率不同的部分,計(jì)算銅導(dǎo)體層磁阻時(shí),需要對(duì)軛鐵和銅的磁導(dǎo)率進(jìn)行等效計(jì)算。圖4為磁力耦合器的等效磁路模型,其中,F(xiàn)m為永磁體磁動(dòng)勢(shì),Φ為總磁通,Φ0為主磁通,Φ1為漏磁通,R0為永磁體磁阻、R1為氣隙磁阻、R2為銅導(dǎo)體磁阻、R3為銅導(dǎo)體軛鐵磁阻、R4為永磁體軛鐵磁阻、R5為相鄰兩磁極間漏磁阻、Rmi為永磁體單側(cè)漏磁阻。考慮到本文所研究的耦合器中永磁體為緊密排布,漏磁路Ⅲ對(duì)整個(gè)磁路的影響甚微,所以永磁體單側(cè)漏磁阻Rmi可以忽略不計(jì)。
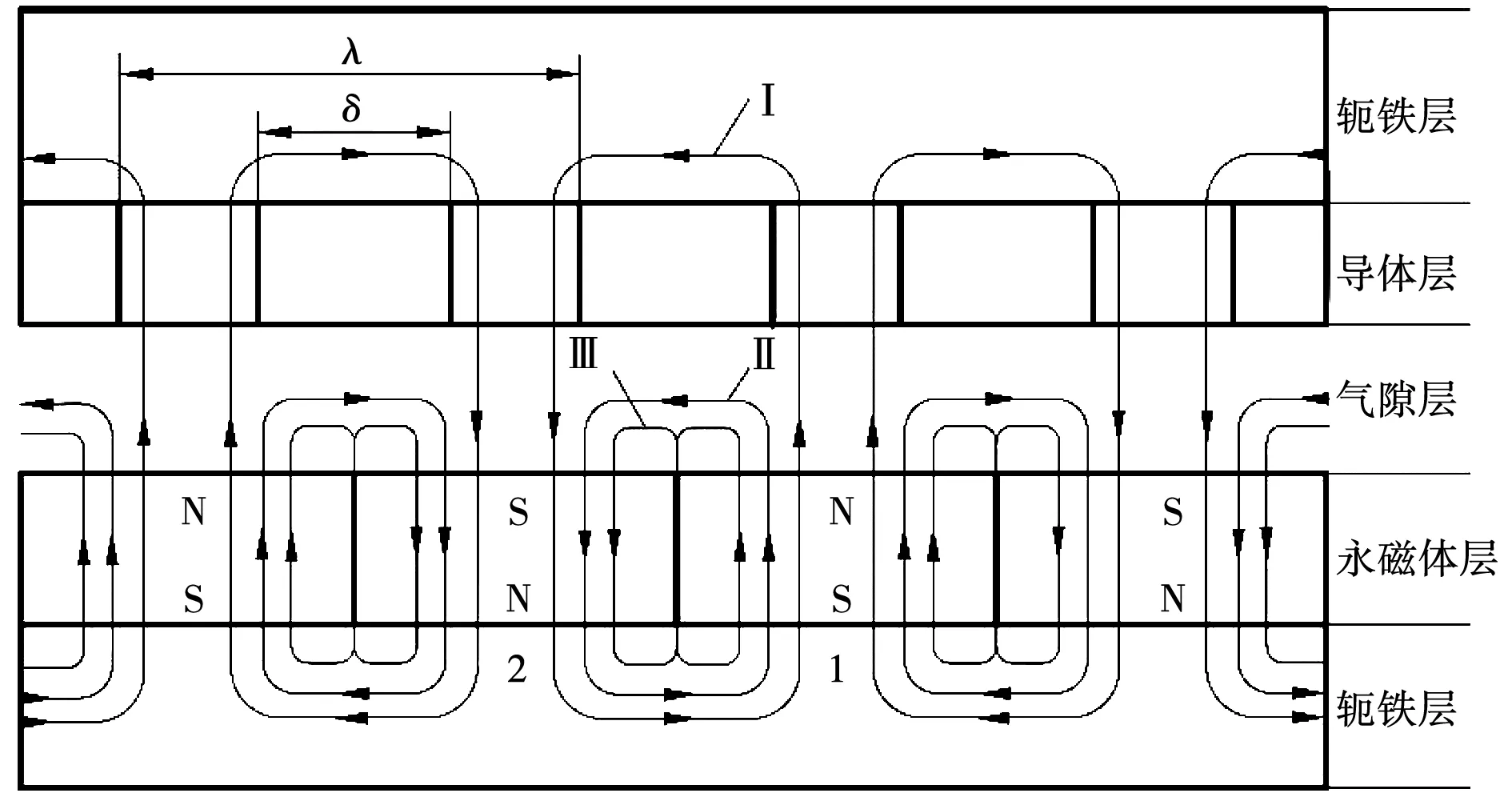
圖3 磁力耦合器磁通路徑Fig.3 Magnetic flux path of the magnetic coupler
圖4中,F(xiàn)m為永磁體的磁動(dòng)勢(shì)源[13],表達(dá)式為
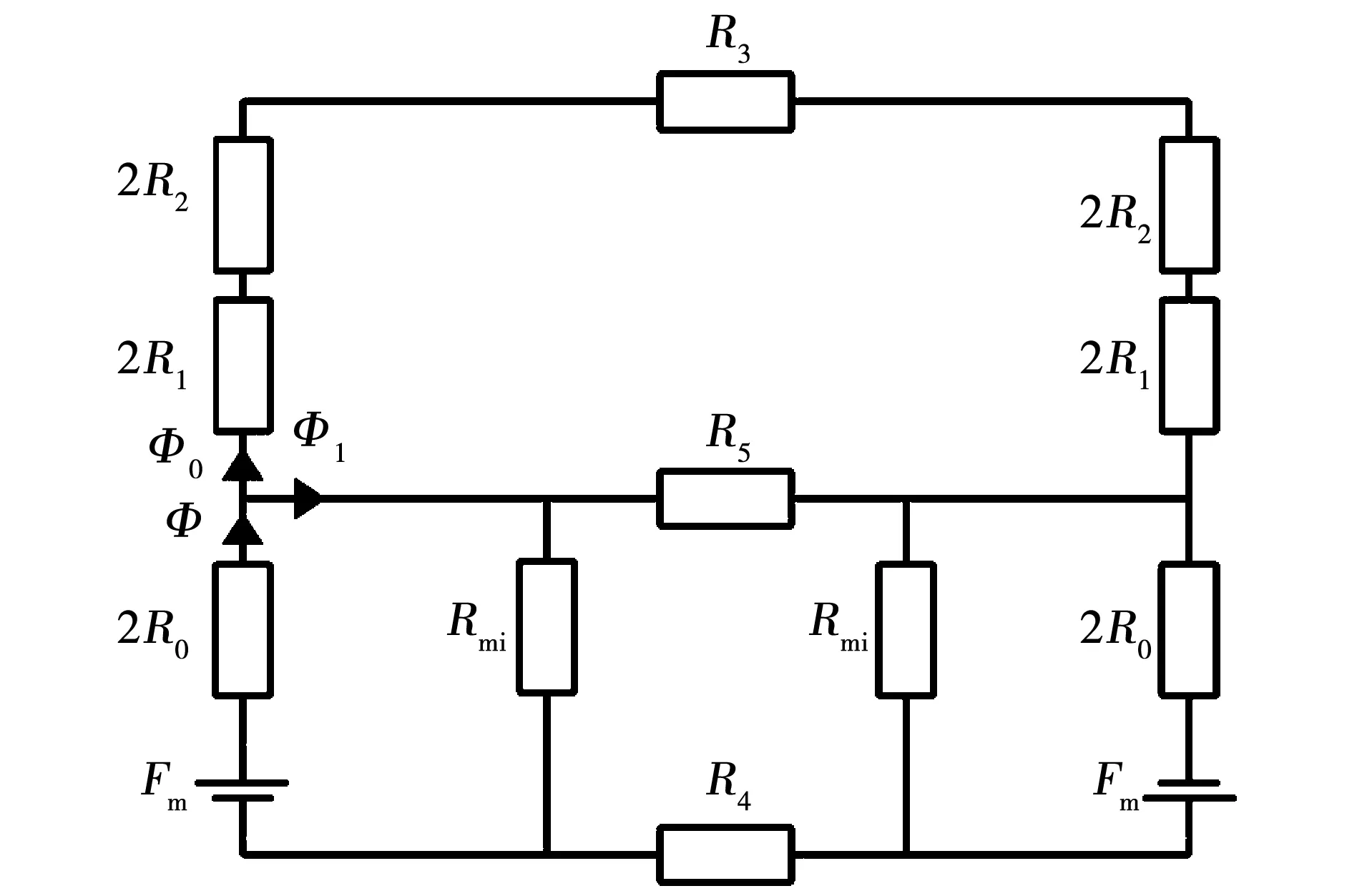
圖4 磁力耦合器等效磁路模型Fig.4 Magnetic equivalent circuit model of the coupler
Fm=Hchm。
(1)
根據(jù)磁阻計(jì)算公式,得到永磁體磁阻、氣隙磁阻、銅導(dǎo)體磁阻、銅導(dǎo)體軛鐵磁阻、永磁體軛鐵磁阻及漏磁阻[14]分別為:
(2)
(3)
(4)

(5)
(6)
(7)
式中:μ0為真空磁導(dǎo)率;μ1為永磁體相對(duì)磁導(dǎo)率;μ2為導(dǎo)體層的等效磁導(dǎo)率;μ3為軛鐵的相對(duì)磁導(dǎo)率;θ為單個(gè)永磁體的圓心角;θ1為齒槽的圓心角;θ2為銅導(dǎo)體的圓心角,如圖1所示。
由于銅導(dǎo)體與軛鐵形成交替排列,導(dǎo)體的磁導(dǎo)率需進(jìn)行等效計(jì)算,其等效磁導(dǎo)率[15]為
(8)
根據(jù)基爾霍夫定律,等效磁路模型中各物理量之間的關(guān)系為:
(9)
將式(2)~式(7)代入到式(9),可得
Φ0(g)=
(10)
根據(jù)磁通密度的計(jì)算公式,SAAMC關(guān)于氣隙g的平均氣隙磁通密度表達(dá)式為
(11)
為了考慮磁力耦合器實(shí)際運(yùn)行時(shí),齒槽對(duì)原磁場(chǎng)的影響,引入鼠籠電機(jī)中的卡特系數(shù)[16],得到磁力耦合器的卡特系數(shù)為
(12)
其中:
(13)
式中:Bg為修正后氣隙磁密;σm為槽寬縮減因子;δ為單個(gè)扇形導(dǎo)體的平均弧長;λ為單個(gè)扇形導(dǎo)體及其相鄰兩個(gè)扇形軛鐵的平均弧長之和,見圖3。
根據(jù)文獻(xiàn)[2]中的電磁轉(zhuǎn)矩計(jì)算方法,結(jié)合式(12),并考慮三維端部效應(yīng),得出磁力耦合器的電磁轉(zhuǎn)矩T關(guān)于氣隙厚度g的計(jì)算公式為:
(14)
其中:
(15)
式中:KR為三維校正因子;σ為銅層的電導(dǎo)率;s為轉(zhuǎn)差率;p為永磁體的極對(duì)數(shù);n0為輸入轉(zhuǎn)速;Kcm為卡特系數(shù);m、α和γ均為自定義參數(shù);Δl為導(dǎo)體延伸長度。
1.3 調(diào)速關(guān)系計(jì)算模型
由調(diào)速原理可知,磁力耦合器可以通過調(diào)節(jié)轉(zhuǎn)子間的氣隙厚度g來控制輸出轉(zhuǎn)速nout,并將調(diào)速過程中轉(zhuǎn)子間的氣隙厚度g與輸出轉(zhuǎn)速nout或轉(zhuǎn)差率s間的關(guān)系定義為磁力耦合器的調(diào)速關(guān)系。本節(jié)在1.2節(jié)的基礎(chǔ)上,將建立恒轉(zhuǎn)矩負(fù)載、二次方率負(fù)載和恒功率負(fù)載三種工況下的調(diào)速關(guān)系模型。
1)恒轉(zhuǎn)矩負(fù)載調(diào)速關(guān)系模型。
恒轉(zhuǎn)矩負(fù)載設(shè)備有傳送帶、軋鋼機(jī)、提升機(jī)等,負(fù)載轉(zhuǎn)矩為定值,即T(g)=Tload=Tc,則
(16)
其中:
(17)
2)二次方率負(fù)載調(diào)速關(guān)系模型。

(18)
3)恒功率負(fù)載調(diào)速關(guān)系模型。
恒功率負(fù)載設(shè)備有造紙機(jī)及機(jī)床主軸等,負(fù)載轉(zhuǎn)矩與轉(zhuǎn)速成反比,即T(g)=Tload=9 550P/nout,則
(19)
運(yùn)用數(shù)值分析軟件,對(duì)以上3種工況下的調(diào)速模型進(jìn)行離散化求解,可得到其調(diào)速特性。
2 電磁場(chǎng)及調(diào)速特性仿真分析
為了驗(yàn)證電磁轉(zhuǎn)矩及調(diào)速關(guān)系的數(shù)學(xué)模型,本文運(yùn)用有限元軟件對(duì)SAAMC進(jìn)行三維建模與仿真分析。
2.1 三維模型建立
圖5為在有限元分析軟件中建立的SAAMC的三維模型,其結(jié)構(gòu)參數(shù)和材料屬性分別見表1、表2。三維模型建立后,對(duì)其進(jìn)行網(wǎng)格劃分及求解設(shè)置。
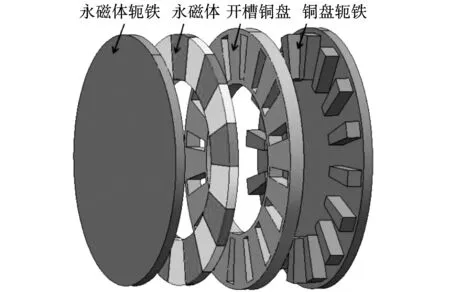
圖5 磁力耦合器三維模型Fig.5 3-D model of the magnetic coupler
2.2 氣隙磁場(chǎng)仿真分析
圖6為氣隙厚度為6 mm時(shí)耦合器永磁體的磁場(chǎng)強(qiáng)度云圖,可以發(fā)現(xiàn)永磁轉(zhuǎn)子的磁場(chǎng)強(qiáng)度整體上大于銅轉(zhuǎn)子磁感應(yīng)強(qiáng)度。永磁轉(zhuǎn)子上磁場(chǎng)強(qiáng)度在兩永磁體之間達(dá)到最大值,導(dǎo)體轉(zhuǎn)子上磁感應(yīng)強(qiáng)度在齒槽邊緣達(dá)到最大值。圖7為氣隙厚度為6 mm、輸入轉(zhuǎn)速1 200 r/min、轉(zhuǎn)差率10%時(shí)的瞬態(tài)磁感應(yīng)強(qiáng)度云圖,永磁轉(zhuǎn)子上磁感應(yīng)強(qiáng)度略低于永磁體的磁場(chǎng)強(qiáng)度,但分布規(guī)律基本一致。
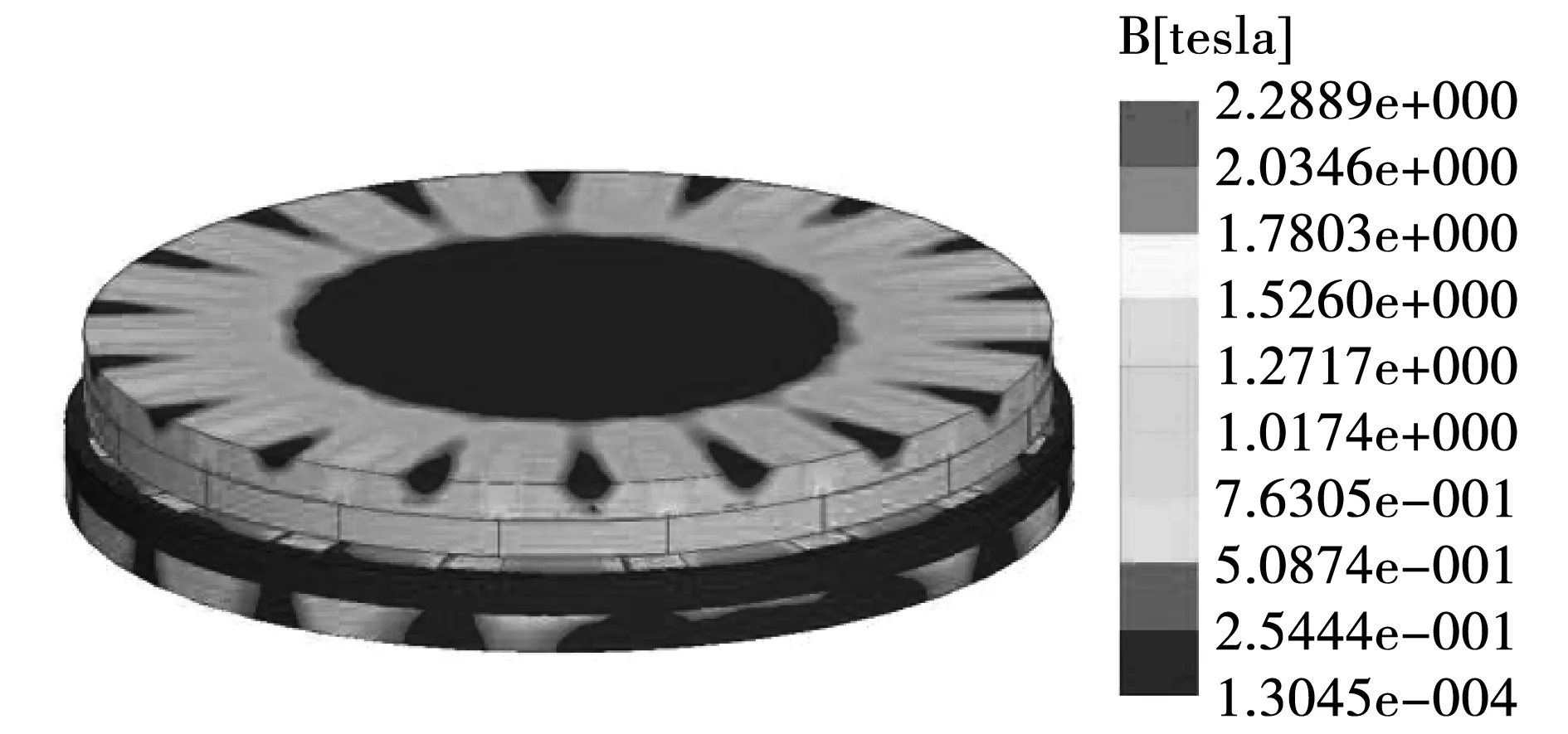
圖6 永磁體的磁場(chǎng)強(qiáng)度云圖Fig.6 Magnetic field intensity nephogram of permanent magnet
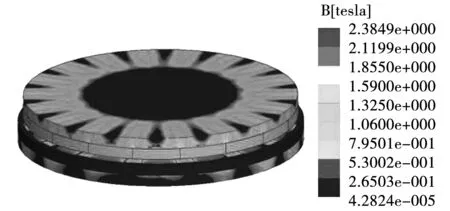
圖7 瞬態(tài)磁感應(yīng)強(qiáng)度云圖Fig.7 Transient magnetic induction intensity nephogram
2.3 機(jī)械特性與功率特性仿真分析
SAAMC的結(jié)構(gòu)參數(shù)及工作條件確定時(shí),將電磁轉(zhuǎn)矩與輸出轉(zhuǎn)速、轉(zhuǎn)差率之間的關(guān)系曲線(nout=f(T)或T=f(s))稱為機(jī)械特性曲線,將輸出功率與轉(zhuǎn)差率之間的關(guān)系P=f(s)稱為功率特性。圖8為輸入轉(zhuǎn)速1 200 r/min,氣隙厚度為1 mm下的機(jī)械特性曲線,當(dāng)負(fù)載轉(zhuǎn)矩小于啟動(dòng)轉(zhuǎn)矩Tst時(shí),磁力耦合器啟動(dòng)。啟動(dòng)后,電磁轉(zhuǎn)矩先增大后減小,轉(zhuǎn)差率為sm時(shí),電磁轉(zhuǎn)矩達(dá)到最大值Tm,即(Tm,sm)為磁力耦合器的最大轉(zhuǎn)矩點(diǎn)。從模擬結(jié)果可以發(fā)現(xiàn)不同氣隙厚度下,最大轉(zhuǎn)矩點(diǎn)的轉(zhuǎn)差率均為sm=15%(見圖10)。圖9為輸出功率隨轉(zhuǎn)差率變化的曲線,可見氣隙厚度為1 mm時(shí),在轉(zhuǎn)差率sP1=11%處達(dá)到最大功率值Pm=20.35 kW,即(sP1,Pm)為氣隙厚度1 mm時(shí)的最大功率點(diǎn),氣隙厚度為14 mm時(shí),在sP2=13%處達(dá)到最大功率值Pn=2.26 kW,即(sP2,Pn)為氣隙厚度14 mm時(shí)的最大功率點(diǎn)。可見,磁力耦合器最大轉(zhuǎn)矩點(diǎn)的轉(zhuǎn)差率固定不變,最大功率點(diǎn)的轉(zhuǎn)差率隨著氣隙厚度的增大而略有增大,處于sP1~sP2范圍。且運(yùn)行轉(zhuǎn)差率小于最大轉(zhuǎn)矩點(diǎn)或最大功率點(diǎn)處轉(zhuǎn)差率時(shí),轉(zhuǎn)矩或功率隨轉(zhuǎn)差率減小而減小的速度較快,反之則較慢。另外,由各曲線間的距離可以看出,最大轉(zhuǎn)矩值和最大功率值均隨氣隙厚度的增大呈非線性減小,減小速度先快后慢。所以需要較大轉(zhuǎn)矩和功率時(shí),應(yīng)在較小工作氣隙下,選擇最大轉(zhuǎn)矩點(diǎn)或最大功率點(diǎn)附近的區(qū)間進(jìn)行調(diào)速。
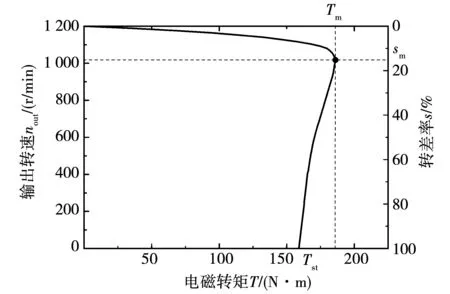
圖8 機(jī)械特性曲線Fig.8 Mechanical characteristic curve
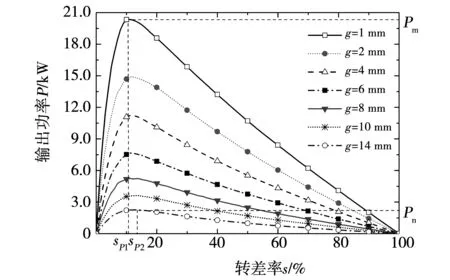
圖9 變氣隙下輸出功率隨轉(zhuǎn)差率變化曲線Fig.9 Variation curves of output power with slip rate under variable air gaps
2.4 調(diào)速特性仿真分析
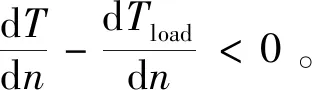
圖10為恒轉(zhuǎn)矩負(fù)載下的調(diào)速特性曲線,可知輸出轉(zhuǎn)速區(qū)間為n0~nm時(shí),耦合器穩(wěn)定運(yùn)行,其中nm為最大轉(zhuǎn)矩點(diǎn)(Tm,sm)處的轉(zhuǎn)速,點(diǎn)a~e屬于穩(wěn)定運(yùn)行點(diǎn)。若負(fù)載由T0增加為T1,將氣隙厚度由4 mm減小為2 mm即可以保持輸出轉(zhuǎn)速為n1不變,工作點(diǎn)由a點(diǎn)轉(zhuǎn)移到b點(diǎn);若負(fù)載保持為T2不變,將氣隙厚度由1 mm增大到2 mm即可以將輸出轉(zhuǎn)速由n1調(diào)整到n2,工作點(diǎn)由c點(diǎn)轉(zhuǎn)移到d點(diǎn)。即磁力耦合器可以實(shí)現(xiàn)兩種模式的速度調(diào)控:其一為負(fù)載轉(zhuǎn)矩值變化時(shí),改變氣隙厚度控制輸出轉(zhuǎn)速不變;其二為負(fù)載轉(zhuǎn)矩值不變時(shí),改變氣隙厚度控制輸出轉(zhuǎn)速達(dá)到目標(biāo)值。
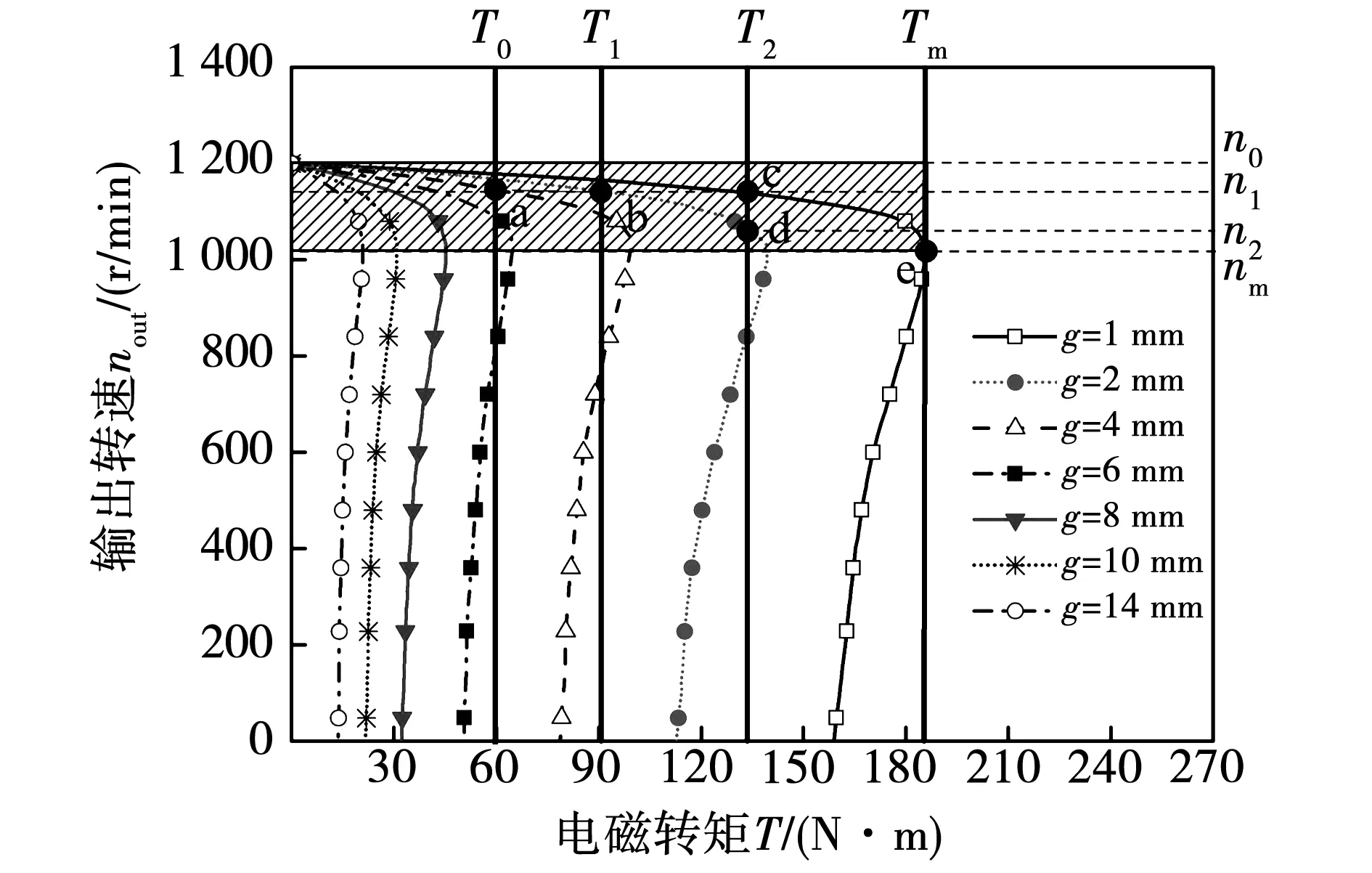
圖10 不同氣隙處恒轉(zhuǎn)矩負(fù)載調(diào)速特性曲線Fig.10 Speed-control characteristic curves under constant torque load at different air gaps
圖11為二次方率負(fù)載下調(diào)速特性曲線,系數(shù)為k1、k2及k3的二次方率負(fù)載曲線與不同氣隙厚度下的機(jī)械特性曲線的交點(diǎn)處均穩(wěn)定運(yùn)行。負(fù)載系數(shù)為k2=1.59×10-4時(shí)二次方率負(fù)載曲線與氣隙厚度為1 mm的機(jī)械特性曲線交于最大功率點(diǎn)N,此時(shí)調(diào)速區(qū)間為0~nk2,可達(dá)到最大功率,負(fù)載系數(shù)減小為k1時(shí),調(diào)速區(qū)間增大為0~nk1,功率減小較快(如圖9),負(fù)載系數(shù)增大為k3時(shí)調(diào)速區(qū)間減小為0~nk3,功率減小較慢。可見,以與最小工作氣隙的最大功率點(diǎn)相交的二次方率負(fù)載曲線的系數(shù)為臨界值,負(fù)載系數(shù)越小調(diào)速范圍越大,功率減小較快,適合小轉(zhuǎn)矩下的大范圍調(diào)速;負(fù)載系數(shù)越大,調(diào)速范圍越小,但功率減小較慢,適合大轉(zhuǎn)矩下的小范圍調(diào)速。
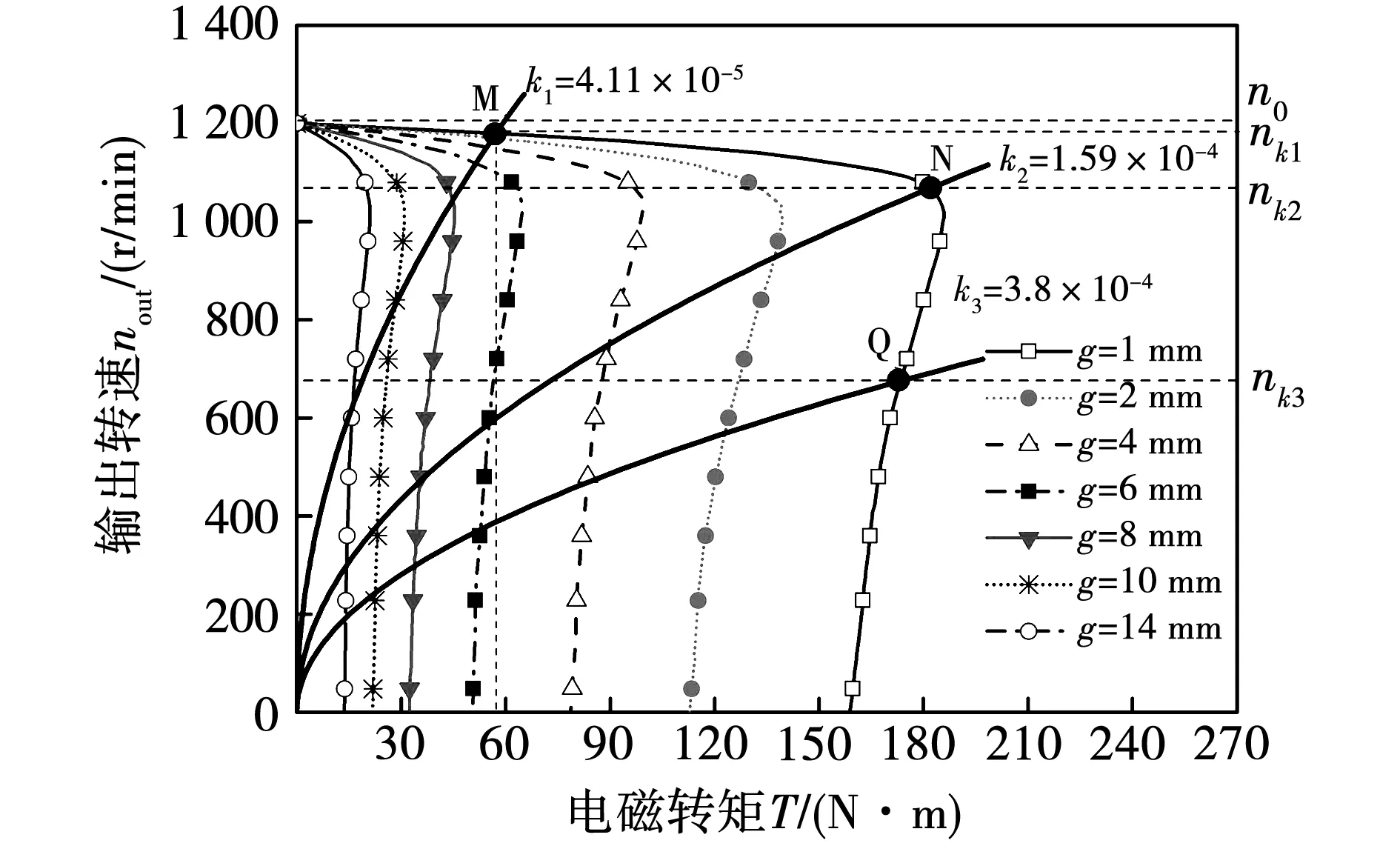
圖11 二次方率負(fù)載不同氣隙下調(diào)速特性曲線Fig.11 Speed-control characteristic curves under quadratic rate load at different air gaps
圖12為恒功率負(fù)載調(diào)速特性曲線,f~k為一定氣隙時(shí)的最大功率點(diǎn)。
圖12 恒功率負(fù)載不同氣隙下調(diào)速特性曲線Fig.12 Speed-control characteristic curves under constant power load at different air gaps
圖13為圖12中方框處的放大圖,當(dāng)轉(zhuǎn)速大于最大功率點(diǎn)對(duì)應(yīng)的轉(zhuǎn)速時(shí),磁力耦合器處于穩(wěn)定運(yùn)行區(qū)域。恒功率值為P1時(shí),A~E點(diǎn)為穩(wěn)定運(yùn)行點(diǎn),F(xiàn)~J點(diǎn)為不穩(wěn)定運(yùn)行點(diǎn),調(diào)速區(qū)間為nP1~nP2,可進(jìn)行調(diào)速的氣隙范圍為1~8 mm。當(dāng)負(fù)載功率值為P2時(shí),K~M點(diǎn)為不穩(wěn)定運(yùn)行點(diǎn),此時(shí)可進(jìn)行調(diào)速的氣隙范圍減小為1~4 mm。當(dāng)負(fù)載功率值增大為P3時(shí),負(fù)載曲線與氣隙厚度1 mm的機(jī)械特性曲線相切于最大功率值點(diǎn)N,僅有N點(diǎn)為穩(wěn)定運(yùn)行點(diǎn),此時(shí)無法進(jìn)行調(diào)速。可見,負(fù)載功率值越大,可進(jìn)行調(diào)速的氣隙范圍越小,磁力耦合器可以帶動(dòng)的最大恒功率負(fù)載為P3=20.35 kW,與最小工作氣隙1 mm處的最大功率值(見圖9)相等。
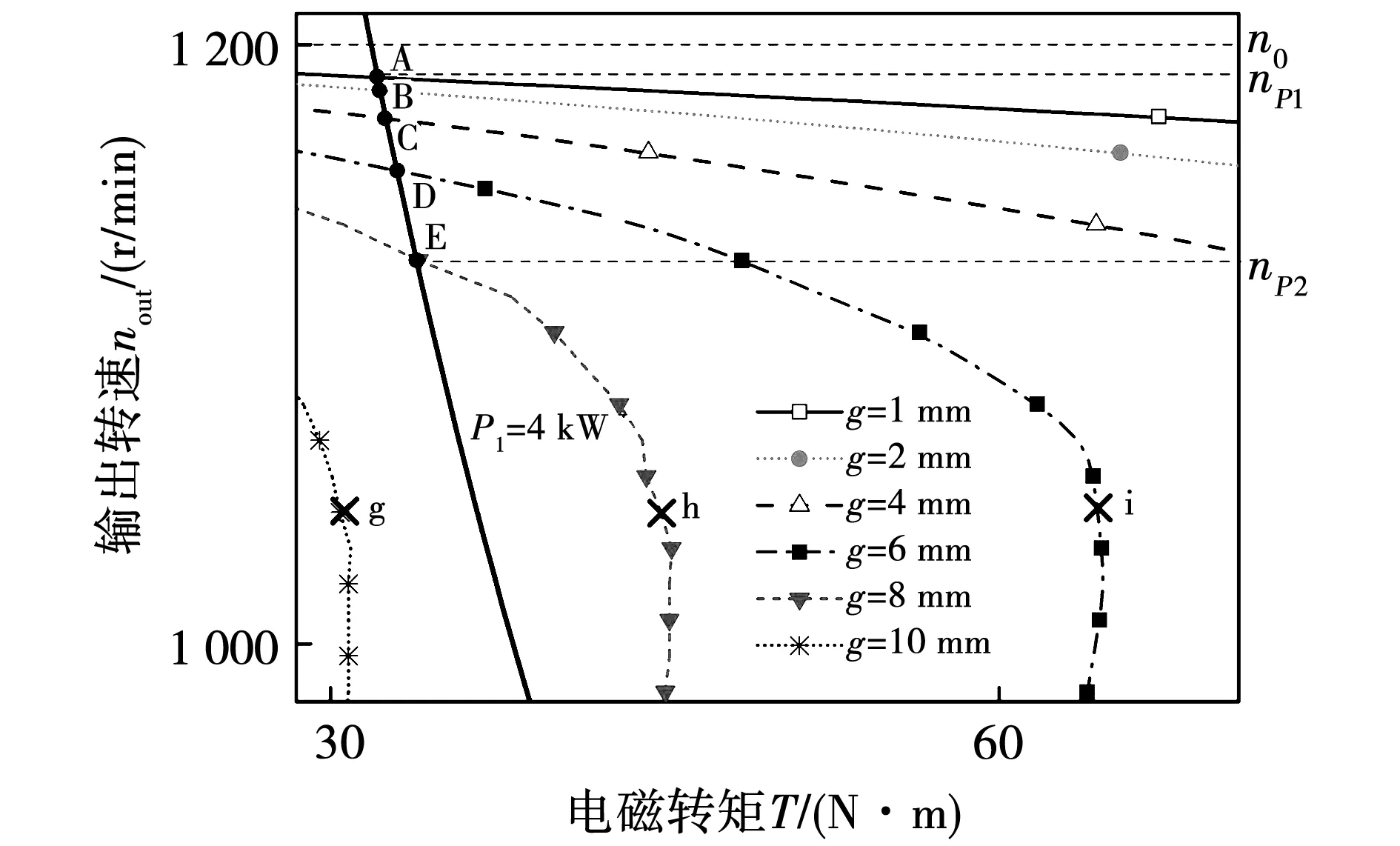
圖13 圖12中A~E處的局部放大圖Fig.13 A local enlargement at points A~E in Fig.12
3 實(shí)驗(yàn)驗(yàn)證
為進(jìn)一步驗(yàn)證電磁轉(zhuǎn)矩及調(diào)速關(guān)系的計(jì)算值與仿真值的準(zhǔn)確性,需對(duì)磁力耦合器的調(diào)速過程進(jìn)行實(shí)驗(yàn)驗(yàn)證,由于實(shí)驗(yàn)條件限制,僅對(duì)調(diào)速過程中的穩(wěn)態(tài)工作點(diǎn)進(jìn)行實(shí)驗(yàn)。
3.1 實(shí)驗(yàn)裝置
圖14為SAAMC的實(shí)驗(yàn)平臺(tái)。平臺(tái)的動(dòng)力源為5.5 kW的三相電機(jī),通過變頻器控制其輸出轉(zhuǎn)速。JC型傳感器用于測(cè)量磁力耦合器輸入以及輸出端的轉(zhuǎn)矩和轉(zhuǎn)速,磁粉制動(dòng)器提供恒負(fù)載或風(fēng)機(jī)提供二次方率負(fù)載。實(shí)驗(yàn)過程中給定負(fù)載,改變氣隙厚度,測(cè)量不同氣隙厚度下的輸出轉(zhuǎn)速,得到氣隙厚度與輸出轉(zhuǎn)速和轉(zhuǎn)差率的關(guān)系曲線。

圖14 負(fù)載試驗(yàn)平臺(tái)Fig.14 Test platform with loads
3.2 實(shí)驗(yàn)結(jié)果及分析
圖15為磁力耦合器輸入轉(zhuǎn)速1 200 r/min,使用磁粉制動(dòng)器提供10 N·m恒轉(zhuǎn)矩負(fù)載時(shí),不同氣隙下輸出轉(zhuǎn)速和轉(zhuǎn)差率的實(shí)驗(yàn)值、計(jì)算值及模擬值的對(duì)比圖,三者趨勢(shì)基本一致。但是,由于實(shí)驗(yàn)過程中存在摩擦、振動(dòng)以及測(cè)量誤差等不可避免的因素影響,實(shí)驗(yàn)值較計(jì)算值和模擬值偏小。圖16為磁力耦合器輸入轉(zhuǎn)速為1 100 r/min時(shí),使用風(fēng)機(jī)提供系數(shù)為k=1.025×10-6二次方率負(fù)載時(shí),不同氣隙厚度下輸出轉(zhuǎn)速、轉(zhuǎn)差率的實(shí)驗(yàn)值與計(jì)算值和模擬值的對(duì)比圖,當(dāng)氣隙厚度在6~14 mm時(shí),三者趨勢(shì)基本一致,但當(dāng)氣隙厚度達(dá)到14 mm之后出現(xiàn)較大偏差。除上述不可避免的因素影響外,大氣隙下磁力耦合器帶載能力弱、受摩擦轉(zhuǎn)矩影響更大,也會(huì)引起較大偏差。可見,實(shí)驗(yàn)結(jié)果與計(jì)算、模擬結(jié)果在小氣隙范圍內(nèi)具有較好的一致性,而在二次方率負(fù)載下,當(dāng)氣隙厚度較大時(shí),產(chǎn)生的偏差較大,但其偏差小于5%。
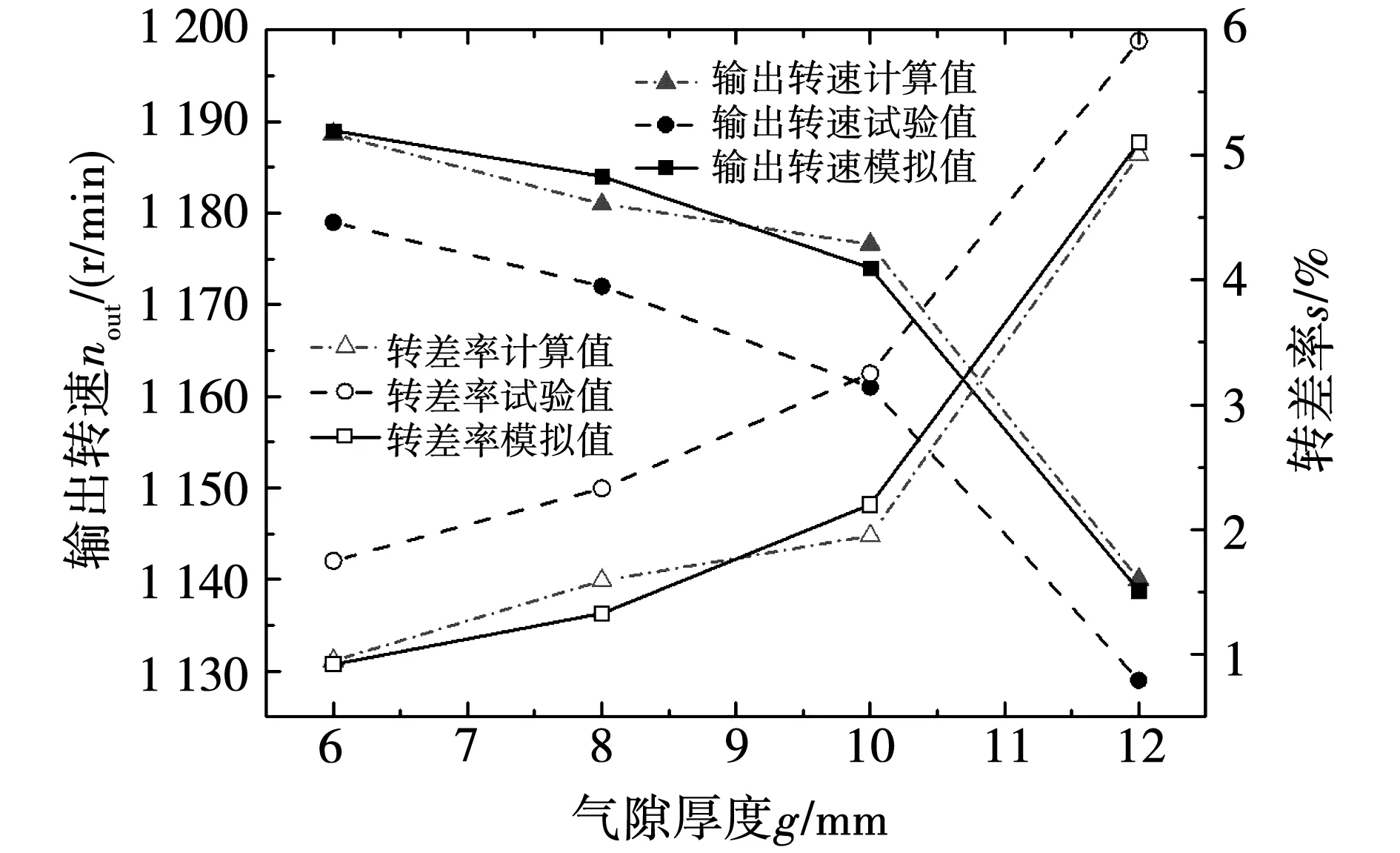
圖15 恒負(fù)載調(diào)速關(guān)系曲線對(duì)比Fig.15 Comparison of speed-control curves under constant load
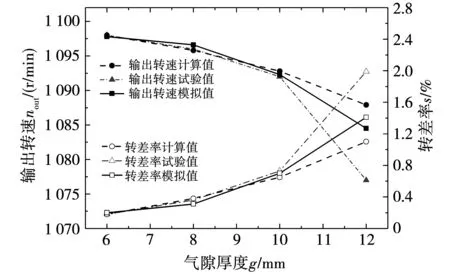
圖16 二次方率負(fù)載調(diào)速關(guān)系曲線對(duì)比Fig.16 Comparison of speed-control curves under quadratic rate load
4 結(jié) 論
1)運(yùn)用等效磁路法結(jié)合卡特系數(shù),并考慮三維端部效應(yīng),推導(dǎo)出SAAMC的電磁轉(zhuǎn)矩公式,建立了其轉(zhuǎn)速調(diào)控的計(jì)算模型。
2)通過有限元模擬確定最大轉(zhuǎn)矩點(diǎn)和最大功率點(diǎn)。可知,最大轉(zhuǎn)矩點(diǎn)的轉(zhuǎn)差率為定值,而最大功率點(diǎn)的轉(zhuǎn)差率隨著氣隙厚度的變化而略有變化,根據(jù)轉(zhuǎn)矩和功率隨轉(zhuǎn)差率及氣隙厚度的變化規(guī)律,可以合理選擇調(diào)速區(qū)間。
3)結(jié)合不同負(fù)載特性,確定了耦合器在三種不同負(fù)載工況下的調(diào)速范圍和調(diào)速特征。通過最大轉(zhuǎn)矩點(diǎn),獲得了恒負(fù)載下的穩(wěn)定調(diào)速區(qū)間,并分析了兩種調(diào)速模式;根據(jù)最小氣隙的最大功率點(diǎn)確定二次方率負(fù)載的臨界值,劃分兩種調(diào)速范圍;通過最大功率點(diǎn)確定耦合器工作的最大恒功率負(fù)載和可調(diào)速的氣隙范圍。
4)通過數(shù)值計(jì)算、有限元分析及實(shí)驗(yàn)測(cè)試三者對(duì)比來驗(yàn)證理論分析及數(shù)值模擬的一致性,為磁力耦合器的智能調(diào)速和實(shí)際應(yīng)用提供理論參考。